C++ AVL树 详细讲解
目录
一、AVL树的概念
二、AVL树的实现
1.AVL树节点的定义
2.AVL树的插入
3.AVL树的旋转
4.AVL树的验证
三、AVL树的性能
四、完结撒❀
一、AVL树的概念
● 它的左右子树都是 AVL 树● 左右子树高度之差 ( 简称平衡因子 ) 的绝对值不超过 1(-1/0/1)

二、AVL树的实现
1.AVL树节点的定义
AVL树节点的定义:
template<class T>
struct AVLTreeNode
{AVLTreeNode(const T& data): _pLeft(nullptr), _pRight(nullptr), _pParent(nullptr), _data(data), _bf(0){}AVLTreeNode<T>* _pLeft; // 该节点的左孩子AVLTreeNode<T>* _pRight; // 该节点的右孩子AVLTreeNode<T>* _pParent; // 该节点的双亲T _data;int _bf; // 该节点的平衡因子
};2.AVL树的插入
1. 按照二叉搜索树的方式插入新节点2. 调整节点的平衡因子
bool Insert(const pair<K, V>& kv)
{// 1. 先按照二叉搜索树的规则将节点插入到AVL树中if (_root == nullptr){_root = new Node(kv);return true;}Node* parent = nullptr;Node* cur = _root;while (cur){if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else{//插入相同值return false;}}//找到cur所在位置cur = new Node(kv);if (parent->_kv.first > cur->_kv.first){parent->_left = cur;cur->_parent = parent;}else{parent->_right = cur;cur->_parent = parent;}// 2. 新节点插入后,AVL树的平衡性可能会遭到破坏,此时就需要更新平衡因子,并检测是否//破坏了AVL树的平衡性/*pCur插入后,pParent的平衡因子一定需要调整,在插入之前,pParent的平衡因子分为三种情况:-1,0, 1, 分以下两种情况:1. 如果pCur插入到pParent的左侧,只需给pParent的平衡因子-1即可2. 如果pCur插入到pParent的右侧,只需给pParent的平衡因子+1即可此时:pParent的平衡因子可能有三种情况:0,正负1, 正负21. 如果pParent的平衡因子为0,说明插入之前pParent的平衡因子为正负1,插入后被调整成0,此时满足
AVL树的性质,插入成功2. 如果pParent的平衡因子为正负1,说明插入前pParent的平衡因子一定为0,插入后被更新成正负1,此
时以pParent为根的树的高度增加,需要继续向上更新3. 如果pParent的平衡因子为正负2,则pParent的平衡因子违反平衡树的性质,需要对其进行旋转处理*///更新平衡因子while (parent){if (parent->_left == cur){parent->_bf--;}else{parent->_bf++;}if (parent->_bf == 0){//二叉树高度没问题,更新结束break;}else if (parent->_bf == 1 || parent->_bf == -1){// 插入前双亲的平衡因子是0,插入后双亲的平衡因子为1 或者 -1 ,说明以双亲为根的二叉树// 的高度增加了一层,因此需要继续向上调整cur = parent;parent = parent->_parent;}else if (parent->_bf == -2 || parent->_bf == 2){//双亲的平衡因子为正负2,违反了AVL树的平衡性//二叉树平衡被破坏,需要旋转完成平衡//判断是右单旋还是左单旋还是双旋//右单旋if (parent->_bf == -2 && cur->_bf == -1){//...}//左单旋else if (parent->_bf == 2 && cur->_bf == 1){//...}//左右双旋else if (parent->_bf == -2 && cur->_bf == 1){//...}//右左双旋else if (parent->_bf == 2 && cur->_bf == -1){//...}}else{//理论上不会出现这种状况assert(false);}}return true;
}3.AVL树的旋转

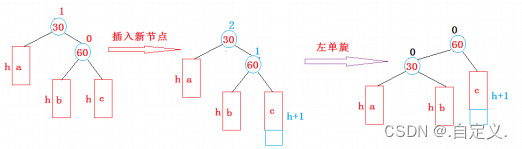
/*上图在插入前,AVL树是平衡的,新节点插入到30的左子树(注意:此处不是左孩子)中,30左
子树增加了一层,导致以60为根的二叉树不平衡,要让60平衡,只能将60左子树的高度减少一层,右子
树增加一层,即将左子树往上提,这样60转下来,因为60比30大,只能将其放在30的右子树,而如果30有
右子树,右子树根的值一定大于30,小于60,只能将其放在60的左子树,旋转完成后,更新节点
的平衡因子即可。在旋转过程中,有以下几种情况需要考虑:1. 30节点的右孩子可能存在,也可能不存在2. 60可能是根节点,也可能是子树如果是根节点,旋转完成后,要更新根节点如果是子树,可能是某个节点的左子树,也可能是右子树此处可举一些详细的例子进行画图,考虑各种情况,加深旋转的理解
*/
void _RotateR(Node Parent)
{// SubL: Parent的左孩子// SubLR: Parent左孩子的右孩子,注意:该Node SubL = Parent->_Left;Node SubLR = SubL->_Right;// 旋转完成之后,30的右孩子作为双亲的左孩子Parent->_Left = SubLR;// 如果30的左孩子的右孩子存在,更新亲双亲if (SubLR)SubLR->_Parent = Parent;// 60 作为 30的右孩子SubL->_Right = Parent;// 因为60可能是棵子树,因此在更新其双亲前必须先保存60的双亲Node Parent = Parent->_Parent;// 更新60的双亲Parent->_Parent = SubL;// 更新30的双亲SubL->_Parent = Parent;// 如果60是根节点,根新指向根节点的指针if (NULL == Parent){_root = SubL;SubL->_Parent = NULL;}else{// 如果60是子树,可能是其双亲的左子树,也可能是右子树if (Parent->_Left == Parent)Parent->_Left = SubL;elseParent->_Right = SubL;}// 根据调整后的结构更新部分节点的平衡因子Parent->_bf = SubL->_bf = 0;
}2) 新节点插入较高右子树的右侧---右右:左单旋
//左单旋
void LNode(Node* parent)
{/*if (parent == _root){Node* pparent = nullptr;}else{Node* pparent = parent->_parent;}*/Node* pparent = parent->_parent;Node* subR = parent->_right;Node* subRL = subR->_left;parent->_left = subRL;if (subRL)subRL->_parent = parent;subR->_left = parent;parent->_parent = subR;if (pparent){subR->_parent = pparent;if (pparent->_left = parent){pparent->_left = subR;}else{pparent->_right = subR;}}else{_root = subR;subR->_parent = nullptr;}parent->_bf = subR->_bf = 0;
}3) 新节点插入较高左子树的右侧---左右:先左单旋再右单旋

// 旋转之前,60的平衡因子可能是-1/0/1,旋转完成之后,根据情况对其他节点的平衡因子进
//行调整
void _RotateLR(Node Parent)
{Node SubL = Parent->_Left;Node SubLR = SubL->_Right;// 旋转之前,保存pSubLR的平衡因子,旋转完成之后,需要根据该平衡因子来调整其他节点的平衡因子int bf = SubLR->_bf;// 先对30进行左单旋_RotateL(Parent->_Left);// 再对90进行右单旋_RotateR(Parent);if (1 == bf)SubL->_bf = -1;else if (-1 == bf)Parent->_bf = 1;
}4) 新节点插入较高右子树的左侧---右左:先右单旋再左单旋

//右左双旋
void RLNode(Node* parent)
{Node* subR = parent->_right;Node* subRL = subR->_left;int bf = subRL->_bf;RNode(parent->_right);LNode(parent);if (bf == 1){subRL->_bf = 0;subR->_bf = 0;parent->_bf = -1;}else if (bf == -1){subRL->_bf = 0;subR->_bf = 1;parent->_bf = 0;}else if (bf == 0){subRL->_bf = 0;subR->_bf = 0;parent->_bf = 0;}else{//理论没有该状况assert(false);}
}当 SubR 的平衡因子为 1 时,执行左单旋当 SubR 的平衡因子为 -1 时,执行右左双旋
当 SubL 的平衡因子为 -1 是,执行右单旋当 SubL 的平衡因子为 1 时,执行左右双旋
4.AVL树的验证
int _size(Node* root)
{return root == nullptr ? 0 : _size(root->_left) + _size(root->_right) + 1;
}int _Height(Node* root)
{if (root == nullptr){return 0;}return max(_Height(root->_left), _Height(root->_right)) + 1;
}bool _IsBalance(Node* root)
{if (root == nullptr){return true;}int LeftHeight = _Height(root->_left);int RightHeight = _Height(root->_right);if (abs(LeftHeight - RightHeight) >= 2){return false;}//可以顺便再检查一下平衡因子if (abs(LeftHeight - RightHeight) != root->_bf){cout << root->_kv.first << endl;return false;}return _IsBalance(root->_left) && _IsBalance(root->_right);
}三、AVL树的性能
四、完结撒❀
如果以上内容对你有帮助不妨点赞支持一下,以后还会分享更多编程知识,我们一起进步。
最后我想讲的是,据说点赞的都能找到漂亮女朋友❤

相关文章:
C++ AVL树 详细讲解
目录 一、AVL树的概念 二、AVL树的实现 1.AVL树节点的定义 2.AVL树的插入 3.AVL树的旋转 4.AVL树的验证 三、AVL树的性能 四、完结撒❀ 一、AVL树的概念 二叉搜索树虽可以缩短查找的效率,但 如果数据有序或接近有序二叉搜索树将退化为单支树,查 …...

Faster R-CNN:端到端的目标检测网络
本文回顾了由微软研究人员开发的 Faster R-CNN 模型。Faster R-CNN 是一种用于物体检测的深度卷积网络,在用户看来,它是一个单一的、端到端的统一网络。该网络可以准确快速地预测不同物体的位置。为了真正理解 Faster R-CNN,我们还必须快速概…...

如何给 MySQL 表和列授予权限?(官方版)
目录 授予表级别权限 授予列级别权限 如何给MySQL表和列授予权限是MySQL数据操作中非常重要的步骤,也是企业级使用MySQL数据库的起步点,以下分别参照官方教程整理的MySQL数据库的权限操作。 以下的语句可以直接使用MySQL的命令行进行操作(如何…...
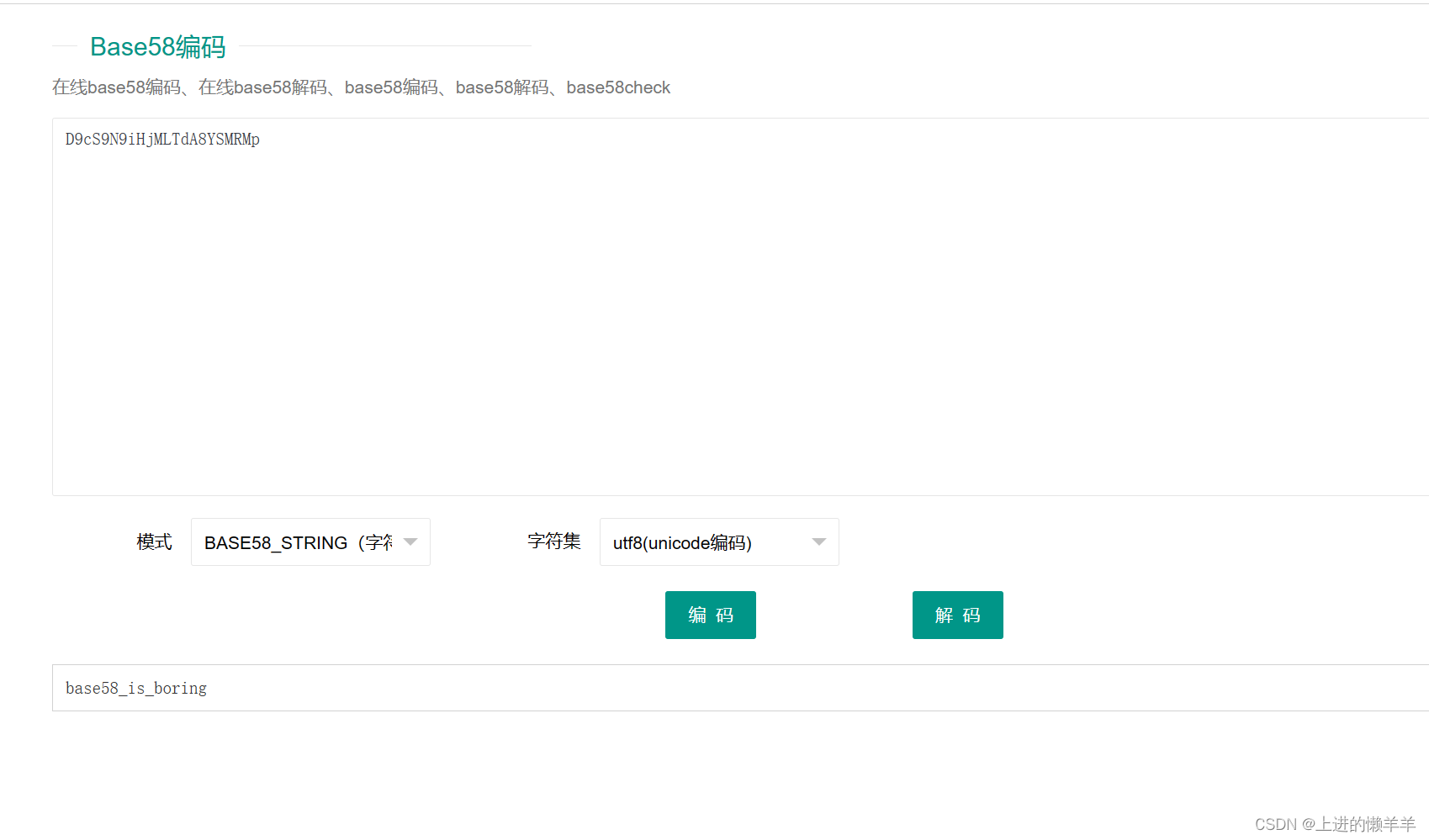
攻防世界testre做法(考点:base58)
在做这道题目之前,我们先来简单了解一下base64加密和base58加密,先来说一些预备知识,bit为1个位,即一个0或1,八个位组成一个字节,即八个二进制数。 base64编码原理:1,在使用base64加…...
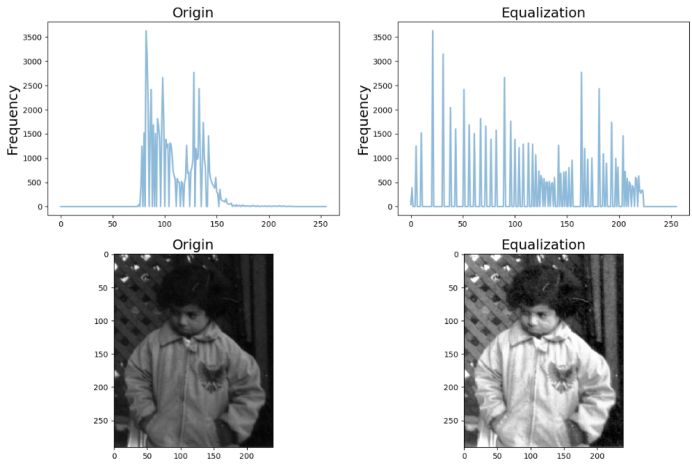
计算机视觉与模式识别实验1-1 图像的直方图平衡
文章目录 🧡🧡实验流程🧡🧡1.读入图像‘rice.png’,在一个窗口中显示灰度级n64,128和256的图像直方图。2.调解图像灰度范围,观察变换后的图像及其直方图的变化。3.分别对图像‘pout.tif’和‘ti…...
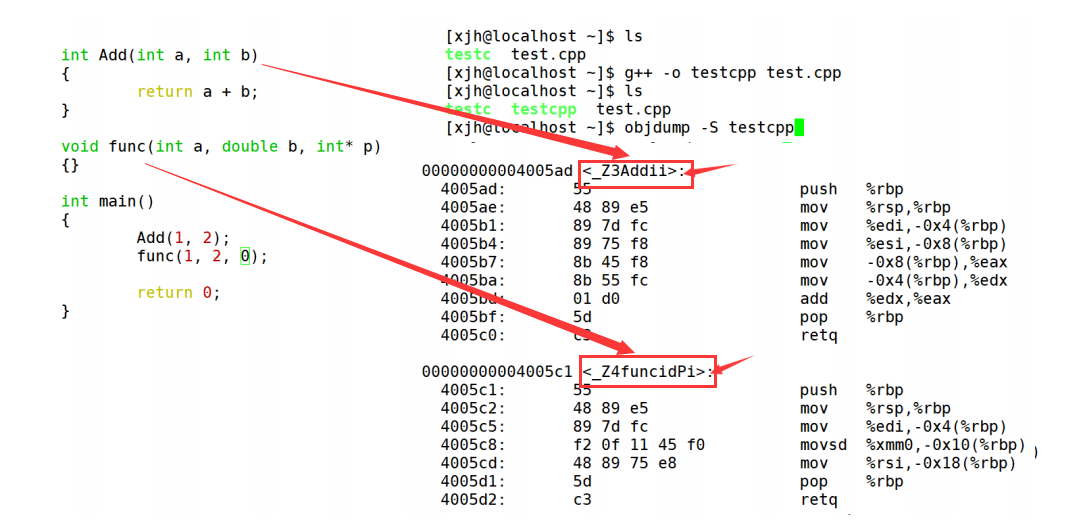
【C++课程学习】:C++入门(函数重载)
🎁个人主页:我们的五年 🔍系列专栏:C课程学习 🎉欢迎大家点赞👍评论📝收藏⭐文章 目录 🌈函数重载: 🍉1.参数个数不同: 🍉2.参数…...

skywalking介绍及搭建
链路追踪框架比对: skywalking安装部署: 下载地址:Downloads | Apache SkyWalking 配置微服务与skywalking整合: copy agent/optional-plugins/apm-spring-cloud-getway-xx.jar到plugins,然后重启skywalking 监控界面…...
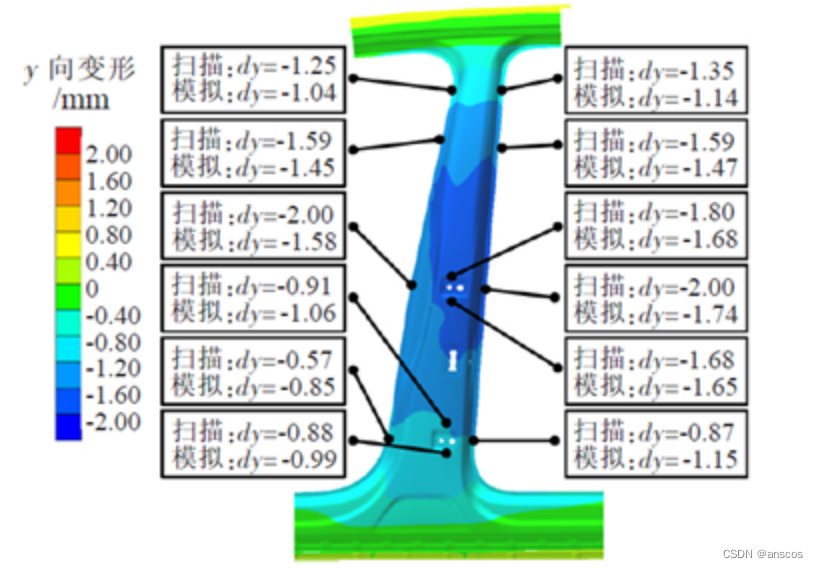
分析示例 | Simufact焊接工艺仿真变形精确预测汽车结构
导语 焊接是汽车制造过程中一个关键环节,白车身、发动机、底盘和变速箱等都离不开焊接工艺的应用,主要涉及气保焊、电阻点焊、激光焊、电子束焊等多种焊接工艺。由于汽车车型众多、成形结构复杂、汽车制造质量、效率、成本等方面的综合要求。如何高效、…...

模式识别选择题
影响K-均值聚类算法效果的主要因素之一是什么? A. 初始聚类中心的选取 B. 样本输入顺序 C. 模式相似性测度 D. 分类准则 答案:A支持向量机(SVM)在处理非线性问题时,通常使用什么方法? A. 引入核函数 B. 增加…...

【Java基础】线程方法
start():启动线程,使线程进入就绪状态。 run():线程执行的代码逻辑,需要重写该方法。 停止线程 void interrupt() 中断线程,让它重新去争抢cpu 如果目标线程长时间等待,则应该使用interrupt方法来中断等待…...

C++之动态数组
C给我们提供了一个叫Vector的类,这个Vector在std命名空间中。这个Vector有点像一个集合,一个不强制其实际元素具有唯一性的集合,和数组一样,但是和C普通的数组又不太一样,和标准的数组不同当你创建Vector时,…...

使用 image-combiner 开源项目实现对海报图片的生成
1:gitee 项目地址 image-combiner: ImageCombiner是一个专门用于Java服务端图片合成的工具,没有很复杂的功能,简单实用,从实际业务场景出发,提供简单的接口,几行代码即可实现图片拼合(当然用于…...

【缓存】框架层常见问题和对策
缓存是为了加快读写速度,再了解redis这类框架层的缓存应用之前,我们不妨先思考下操作系统层面的缓存解决方案,这样有助于我们更深的理解缓存,哪些是系统层面的,哪些是服务层面。 以下是一些常见的缓存问题及其解决方案…...

【FAS】《CN103106397B》
原文 CN103106397B-基于亮瞳效应的人脸活体检测方法-授权-2013.01.19 华南理工大学 方法 / 点评 核心方法用的是传统的形态学和模板匹配,亮点是双红外发射器做差分 差分:所述FPGA芯片控制两组红外光源(一近一远)交替亮灭&…...
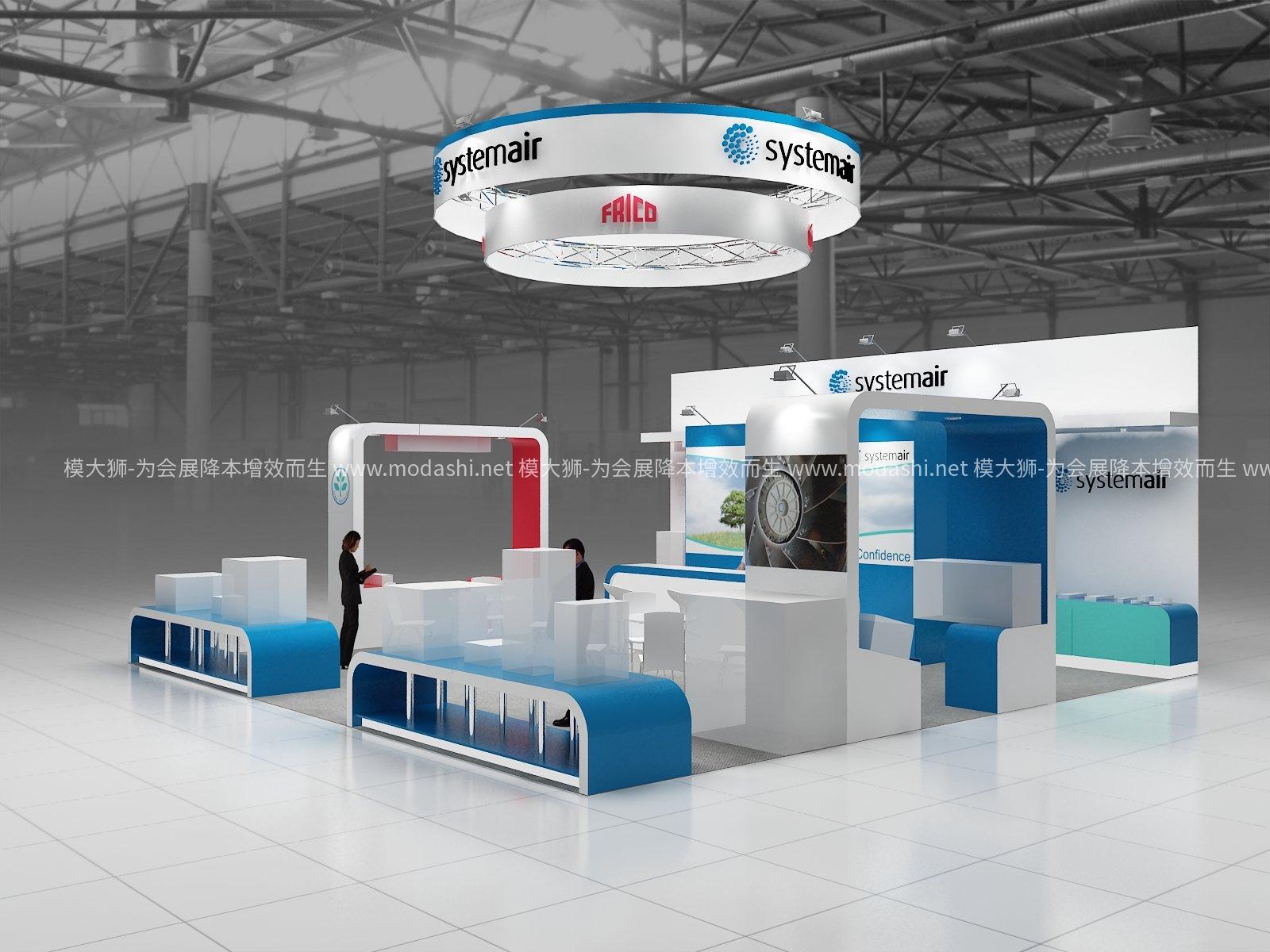
3D按F3为什么显示不出模型?---模大狮模型网
对于3D建模软件的用户来说,按下F3键通常是用来显示或隐藏模型的功能之一。然而,有时当按下F3键时,却无法正确显示模型,这可能会让用户感到困惑。模大狮将探讨这种情况发生的可能原因以及解决方法,帮助设计师们更好地理…...
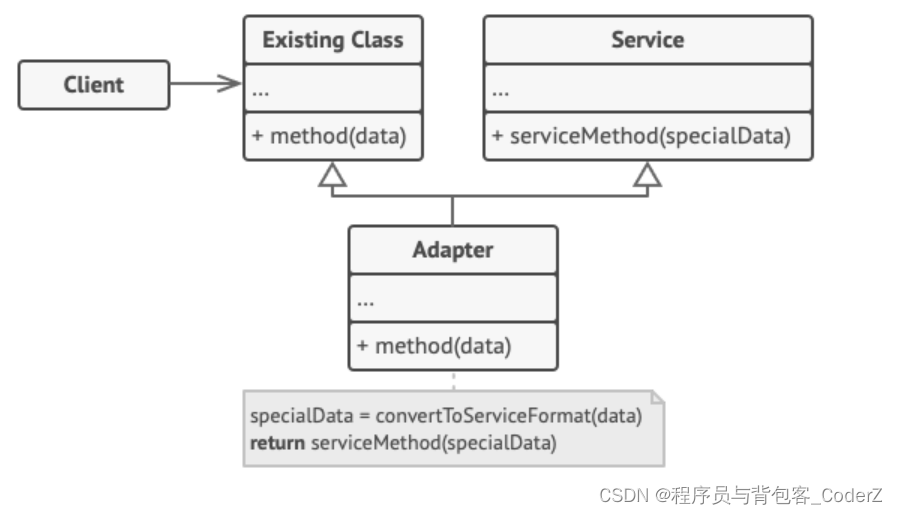
C++设计模式——Adapter适配器模式
一,适配器模式简介 适配器模式是一种结构型设计模式,用于将已有接口转换为调用者所期望的另一种接口。 适配器模式让特定的API接口可以适配多种场景。例如,现有一个名为"Reader()"的API接口只能解析txt格式的文件,给这…...

Python文本处理利器:jieba库全解析
文章目录 Python文本处理利器:jieba库全解析第一部分:背景和功能介绍第二部分:库的概述第三部分:安装方法第四部分:常用库函数介绍1. 精确模式分词2. 全模式分词3. 搜索引擎模式分词4. 添加自定义词典5. 关键词提取 第…...

【C/C++】C语言如何实现类似C++的智能指针?
在C中,智能指针是为了自动化资源管理而引入的工具。比如std::unique_ptr和std::shared_ptr等,它们管理着所持有对象的生命周期,可以在智能指针被销毁时自动释放其所持有的资源。在C语言中,虽然没有直接的智能指针概念,…...
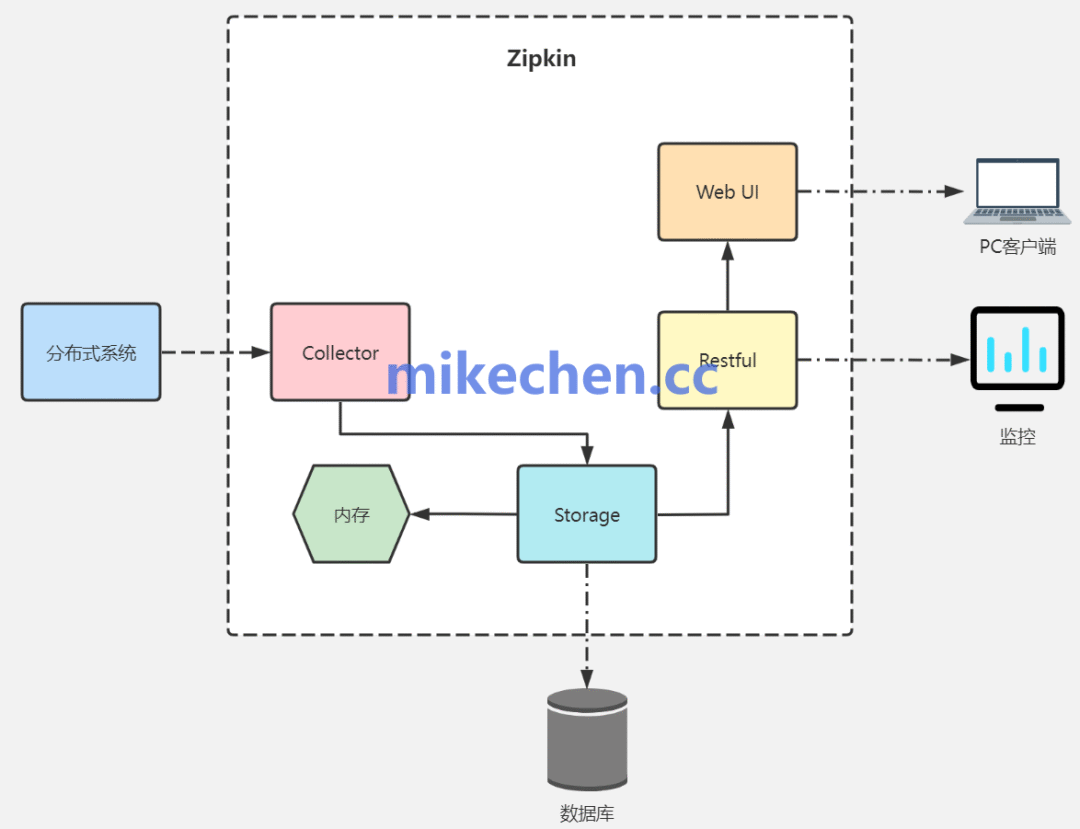
九大微服务监控工具详解
Prometheus Prometheus 是一个开源的系统监控、和报警工具包,Prometheus 被设计用来监控“微服务架构”。 主要解决: 监控和告警:Prometheus 可以对系统、和应用程序进行实时监控,并在出现问题时发送告警;数据收集和…...

java aliyun oss上传和下载工具类
java aliyun oss上传和下载工具类 依赖 <dependency><groupId>com.aliyun.oss</groupId><artifactId>aliyun-sdk-oss</artifactId><version>3.8.0</version></dependency>工具类 import com.alibaba.fastjson.JSON; import c…...

ReMe:为AI智能体构建长期记忆与上下文管理的开源框架
1. 项目概述与核心价值如果你正在构建或使用AI智能体(Agent),并且被“金鱼记忆”问题困扰——比如对话一长,模型就忘了开头说了什么;或者每次新会话都像初次见面,完全记不住用户偏好和历史任务——那么ReMe…...

用 C 语言函数表实现通信传输层抽象
用 C 语言函数表实现通信传输层抽象 在嵌入式 Linux 或工业控制类程序中,一个应用经常需要同时接入多种通信链路,例如 UDP、串口、CAN、TCP 或 Unix Socket。 这些链路的底层实现差异很大: UDP 基于 socket串口基于 tty 设备CAN 基于 SocketC…...

CFD热分析中绝热传热系数与叠加核函数原理及应用
1. CFD热分析中的绝热传热系数与叠加核函数原理剖析在电子设备热管理领域,随着功率密度的不断提升,传统的热设计方法已难以满足精度和效率的双重要求。绝热传热系数(Adiabatic Heat Transfer Coefficient, AHTC)与叠加核函数(Superposition Kernel Funct…...

如何轻松下载B站4K大会员视频?这款开源工具让你三步搞定离线收藏
如何轻松下载B站4K大会员视频?这款开源工具让你三步搞定离线收藏 【免费下载链接】bilibili-downloader B站视频下载,支持下载大会员清晰度4K,持续更新中 项目地址: https://gitcode.com/gh_mirrors/bil/bilibili-downloader 想象一下…...

量子退火在锂离子电池材料优化中的应用与原理
1. 量子退火技术原理与材料优化应用概述量子退火(Quantum Annealing)是一种基于量子力学原理的优化算法,它通过模拟量子系统的绝热演化过程来寻找复杂问题的全局最优解。与传统模拟退火算法相比,量子退火利用量子隧穿效应而非热涨…...

AI代理如何通过MCP协议实现DeFi自动化操作与策略执行
1. 项目概述:当DeFi遇上AI代理,Robocular/defi-mcp的诞生最近在捣鼓链上自动化策略和AI代理,发现了一个挺有意思的项目——Robocular/defi-mcp。简单来说,这是一个专门为AI代理(特别是那些基于MCP,也就是Mo…...

运营商Palantir本体论落地思考
在运营商数字化转型的浪潮中,数据平台建设已经不是什么新鲜事。大多数省级运营商都已经有了自己的数据中台、数据湖或者BI系统,能看到数据、能做报表、能出分析。但问题来了:**看到数据之后呢?**分析完了,客户可能离网…...

沈阳哪家GEO优化公司靠谱
2026年,AI搜索与生成式引擎普及,GEO优化成为企业获取精准流量的核心手段。在沈阳,如何筛选具备技术实力与落地能力的服务商,成为企业主关注焦点。以下基于公开信息与行业观察,梳理几家代表性机构供选型参考。辽宁云界数…...

ARM架构浮点运算与FPEXC/FPSCR寄存器详解
1. ARM架构浮点运算基础在嵌入式系统和移动计算领域,ARM处理器凭借其高效的能耗比占据主导地位。浮点运算作为科学计算、图形处理和机器学习的基础,其性能直接影响着整个系统的表现。ARM架构通过专门的浮点运算单元和配套的寄存器系统,为开发…...

从电视测试卡到EDA工具:电子设计自动化的演进与内核
1. 项目概述:从测试卡到EDA,一段技术演进的个人叙事前几天整理旧物,翻出一张泛黄的老照片,是我小时候和堂姐蹲在黑白电视机前的合影。背景里,电视屏幕上不是动画片,而是那个著名的BBC测试卡图案——一个穿着…...