D455相机RGB与深度图像对齐,缓解相机无效区域的问题
前言
上一次我们介绍了深度相机D455的使用:intel深度相机D455的使用-CSDN博客,我们也看到了相机检测到的无效区域。

在使用Intel深度相机D455时,我们经常会遇到深度图中的无效区域。这些无效区域可能由于黑色物体、光滑表面、透明物体以及视差效应等原因引起。为了解决这些问题,我们可以采用图像修复与滤波结合的方法。具体步骤包括创建掩模图、使用插值方法填补缺失值,以及利用OpenCV的inpaint函数进行修复。本文详细介绍了如何根据不同的对齐方式(深度对齐到彩色或彩色对齐到深度)来处理无效区域,并展示了图像修复的实际代码和效果。这些方法能有效提升深度图质量,特别适用于深度加雾任务。
请注意本文中图像修复与滤波结合的方法处理无效区域的部分,仅仅只适用于我的需求,即根据深度图进行深度加雾的任务。
深度相机的缺点
D455原理
双目立体视觉系统通过视差计算来获得深度信息。相机系统捕捉到的两幅红外图像会有一个视差,即相同物体在两幅图像中的位置差异。通过视差计算,可以推算出物体到相机的距离(深度)。
缺点
黑色物体的影响
黑色物体对光线的反射率非常低,意味着它们吸收大部分入射光线,而不是反射回去。对于依赖反射光线来计算深度的双目立体视觉系统,这会导致反射信号不足,从而影响深度计算的精度和可靠性。并且黑色物体通常与背景之间的对比度较低,这使得双目相机难以在图像中识别和匹配这些物体的特征点,从而影响视差计算。
光滑物体表面反射的影响
光滑表面会产生镜面反射,这意味着光线会按照入射角以相同的角度反射出去。这种反射模式不同于漫反射,深度相机会因为接收到的光线方向不一致而无法准确计算深度信息。
图源:深度相机的坑_结构光相机深度信息缺失-CSDN博客
透明物体透射的影响
玻璃等透明物体对基于结构光的深度相机造成的问题尤其明显。因为这些相机依赖红外光的反射来测量深度,当光线穿过或在玻璃表面反射时,会导致深度信息不准确或完全丢失。这种情况会导致深度图像中出现大量的零值或无效值。
视差的影响
在物体边缘或细小结构上,视差效应会导致深度信息的不连续和噪声。由于深度相机的发射端和接收端之间存在间距,物体边缘会有视觉盲区。远处物体边缘受影响较小,但近距离物体边缘会显著受影响,产生无效深度值的阴影区域,导致深度图在这些区域中缺失和不准确。
RGB与深度图像对齐
深度对齐到彩色(ALIGN_WAY = 1): 这种方式通常用于彩色图像具有更高分辨率或更高精度的情况,将深度图像的像素对齐到彩色图像的像素上,便于在彩色图像中进行对象检测或其他处理。
彩色对齐到深度(ALIGN_WAY = 0): 这种方式通常用于深度图像的分辨率更高的情况,将彩色图像的像素对齐到深度图像的像素上,便于在深度图像中进行精确的距离测量。
import pyrealsense2 as rs
import os
import cv2
import numpy as np
from Depth_camera.utils import get_depth_camera_info, create_camera_save_pathsaved_count = 0
extend_num = 3
width = 640
height = 480
fps = 30# 0:彩色图像对齐到深度图;
# 1:深度图对齐到彩色图像
ALIGN_WAY = 1color_path, depth_path = create_camera_save_path()
pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, width, height, rs.format.z16, fps)
config.enable_stream(rs.stream.color, width, height, rs.format.bgr8, fps)profile = pipeline.start(config)
get_depth_camera_info(profile)# 设置对齐方式
align_to = rs.stream.color if ALIGN_WAY == 1 else rs.stream.depth
align = rs.align(align_to)
color_image2 = None
try:while True:frames = pipeline.wait_for_frames()# 对齐图像aligned_frames = align.process(frames)depth_frame = aligned_frames.get_depth_frame()color_frame = aligned_frames.get_color_frame()depth_image = np.asanyarray(depth_frame.get_data())if ALIGN_WAY == 0:color_frame2 = frames.get_color_frame()color_image2 = np.asanyarray(color_frame2.get_data())cv2.imshow("color_image2", color_image2)color_image = np.asanyarray(color_frame.get_data())# 获取深度信息,以米为单位depth_scale = profile.get_device().first_depth_sensor().get_depth_scale()depth_image_in_meters = depth_image * depth_scaledepth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET)images = np.hstack((color_image, depth_colormap))cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)cv2.imshow('RealSense', images)cv2.imshow("depth_image_in_meters", depth_image_in_meters)key = cv2.waitKey(1)if key & 0xFF == ord('s'):saved_count += 1print(f"{saved_count} 已保存图像至 {color_path} 和 {depth_path}")if color_image2 is None:cv2.imwrite(os.path.join(color_path, "{}.png".format(saved_count)), color_image)else:cv2.imwrite(os.path.join(color_path, "{}.png".format(saved_count)), color_image2)# 深度信息保存为 .npy 格式,单位为米np.save(os.path.join(depth_path, "{}.npy".format(saved_count)), depth_image_in_meters)elif key & 0xFF == ord('q') or key == 27:cv2.destroyAllWindows()breakfinally:pipeline.stop()
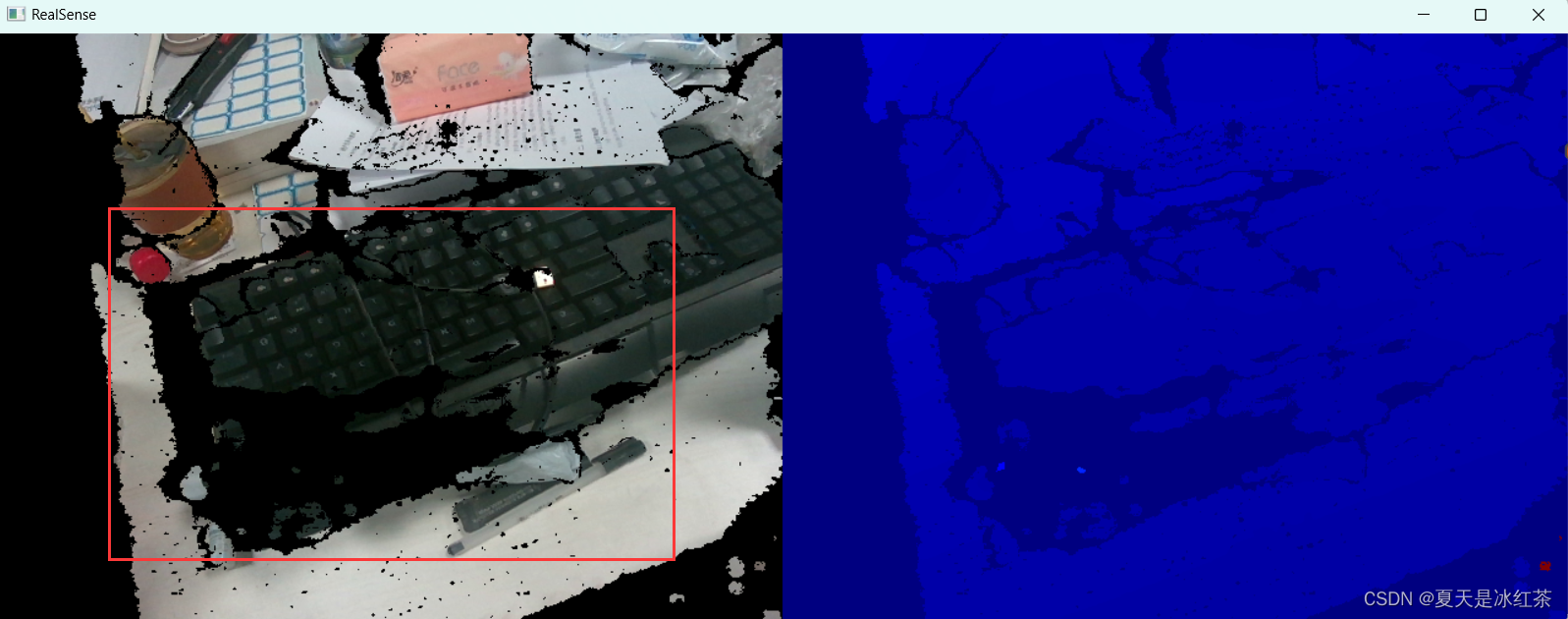
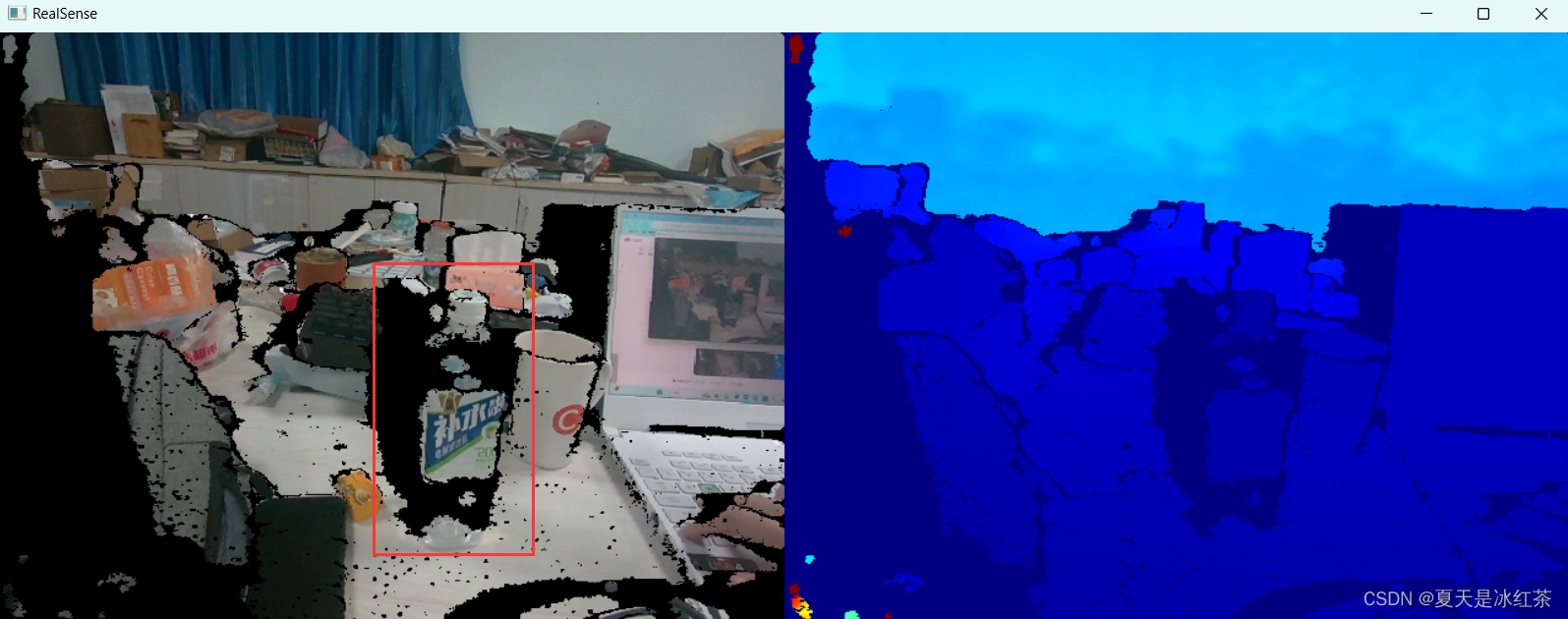
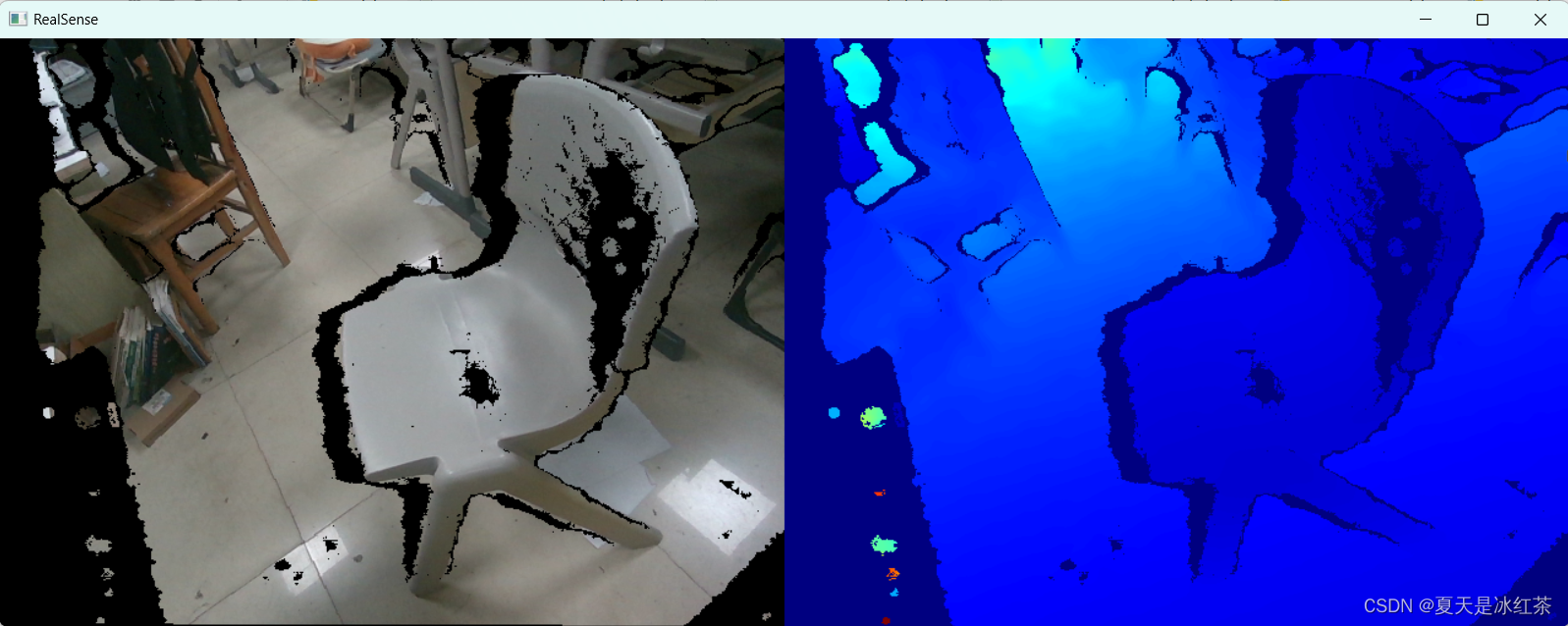
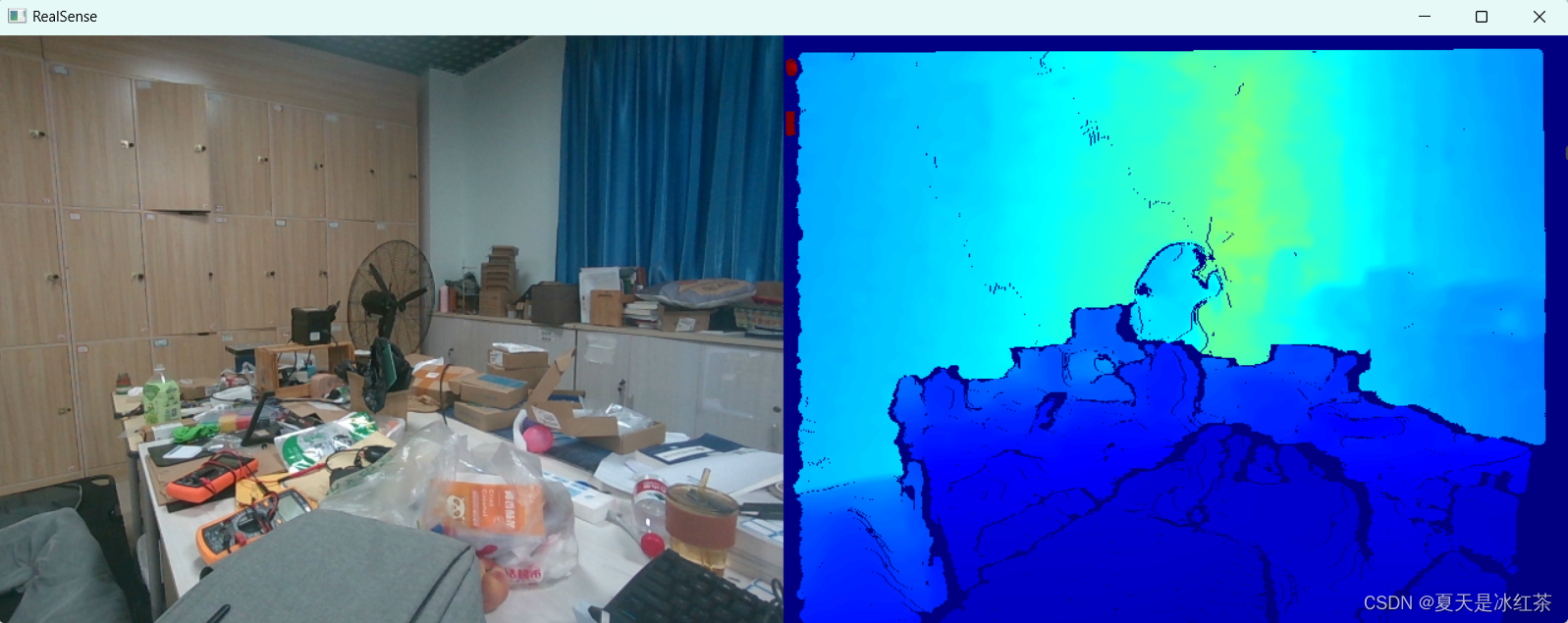
当ALIGN_WAY = 1 的效果:
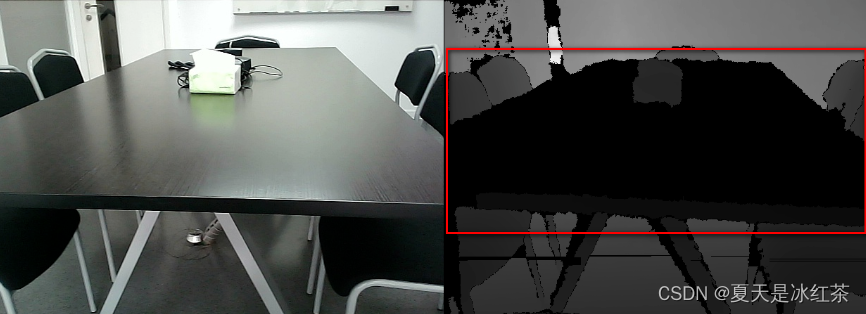
当ALIGN_WAY = 0 的效果:
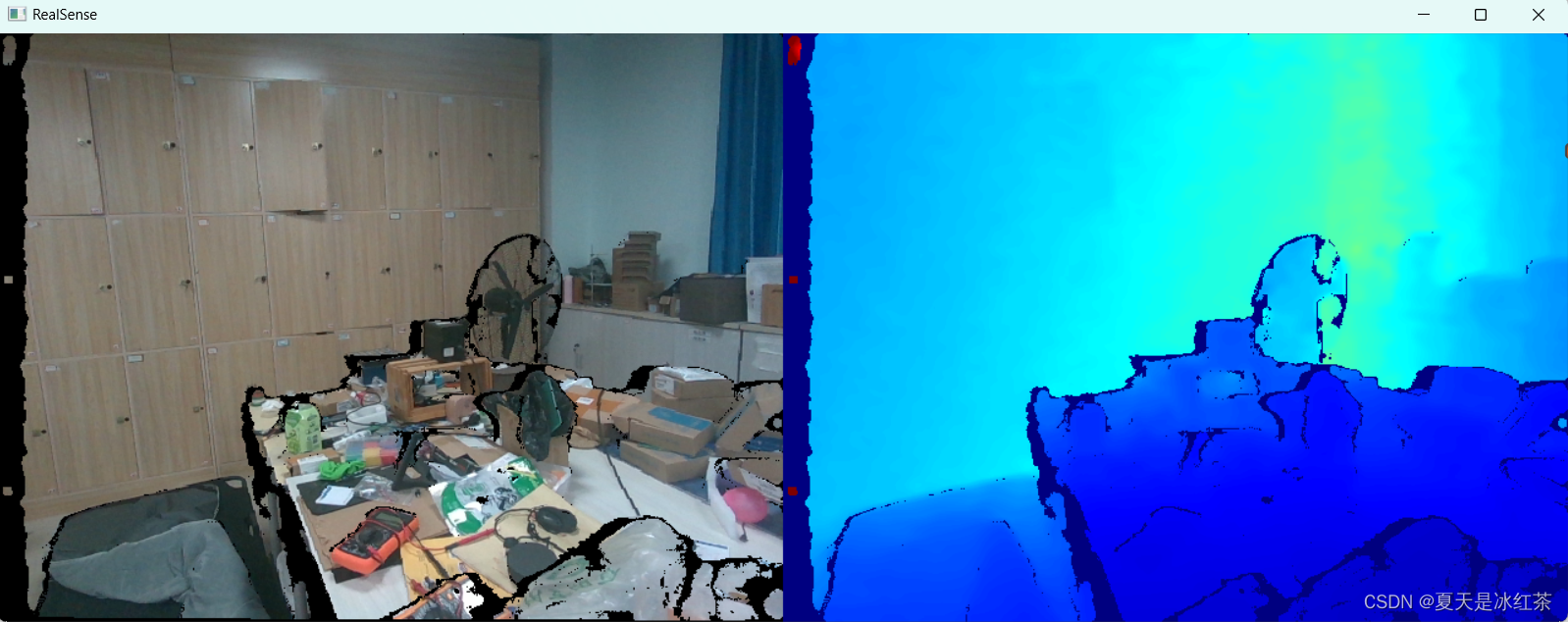
这样拍摄的图片能缓解无效区域。
图像修复与滤波结合处理无效区域
采用图像修复来处理深度图像中的缺失值(深度值为0的像素)。具体而言,按照以下步骤:
- 创建一个掩模图,将深度图像中值为0的像素标记为需要修补的区域。
- 将深度图像中的值为0的像素替换为NaN,这样做是为了在后续处理中标记需要填充的区域。
- 使用最近邻插值方法填充NaN值,将其替换为周围已知深度值的平均值。
- 使用OpenCV中的cv2.inpaint函数进行修补,根据掩模图进行修复。
import cv2
import numpy as np
import osdef inpaint_depth_image(depth_image, inpaintRadius=3):mask = (depth_image == 0).astype(np.uint8)depth_image_fixed = np.where(depth_image == 0, np.nan, depth_image)nan_mask = np.isnan(depth_image_fixed)depth_image_fixed[nan_mask] = np.interp(np.flatnonzero(nan_mask), np.flatnonzero(~nan_mask),depth_image_fixed[~nan_mask])inpainted_depth_image = cv2.inpaint(depth_image_fixed.astype(np.float32), mask, inpaintRadius=inpaintRadius,flags=cv2.INPAINT_TELEA)return inpainted_depth_imagedef read_one_npy(path):depth_image = np.load(path)print(depth_image.shape)x = 1y = 1# 修补深度图像inpainted_depth_image = inpaint_depth_image(depth_image)print(np.unique(inpainted_depth_image))inpainted_depth_image = np.where(inpainted_depth_image <= 0, inpainted_depth_image + 1, inpainted_depth_image)print(np.unique(inpainted_depth_image))median_filtered_image = cv2.medianBlur(inpainted_depth_image, 3)truth_depth = median_filtered_image[x, y]print(truth_depth)cv2.imshow("depth", depth_image)cv2.imshow("inpainted_depth", median_filtered_image)cv2.waitKey(0)cv2.destroyAllWindows()def process_and_save_depth_images(input_folder, output_folder):os.makedirs(output_folder, exist_ok=True)for filename in os.listdir(input_folder):if filename.endswith(".npy"):file_path = os.path.join(input_folder, filename)depth_image = np.load(file_path)inpainted_depth_image = inpaint_depth_image(depth_image)inpainted_depth_image = np.where(inpainted_depth_image <= 0.5, inpainted_depth_image + 1,inpainted_depth_image)filtered_image = cv2.medianBlur(inpainted_depth_image, 5)## filtered_image = cv2.GaussianBlur(inpainted_depth_image, (5, 5), 0)filtered_image = cv2.bilateralFilter(filtered_image, 5, 75, 75)output_file_path = os.path.join(output_folder, filename)np.save(output_file_path, filtered_image)print(f"Processed and saved: {output_file_path}")if __name__ == "__main__":input_folder = r"D:\PythonProject\Githubproject\Depth_camera\2024_06_07_20_01_47\depth"output_folder = r"D:\PythonProject\Githubproject\Depth_camera\result\depth"im_path = r"D:\PythonProject\Githubproject\Depth_camera\2024_06_07_20_01_47\depth\1.npy"# process_and_save_depth_images(input_folder, output_folder)read_one_npy(im_path)滤波处理能够有效的去除图像中的孤立噪点,平滑图像,这块使用何种滤波方式没有什么讲究,一般来说双边滤波能够边缘清晰的同时平滑图像,适用于保留图像细节的情况,但其实在仅使用中值滤波的效果也不错。可以根据个人任务需求组合。
可以增加修补函数的半径或者组合滤波,修改核的大小等进行改善
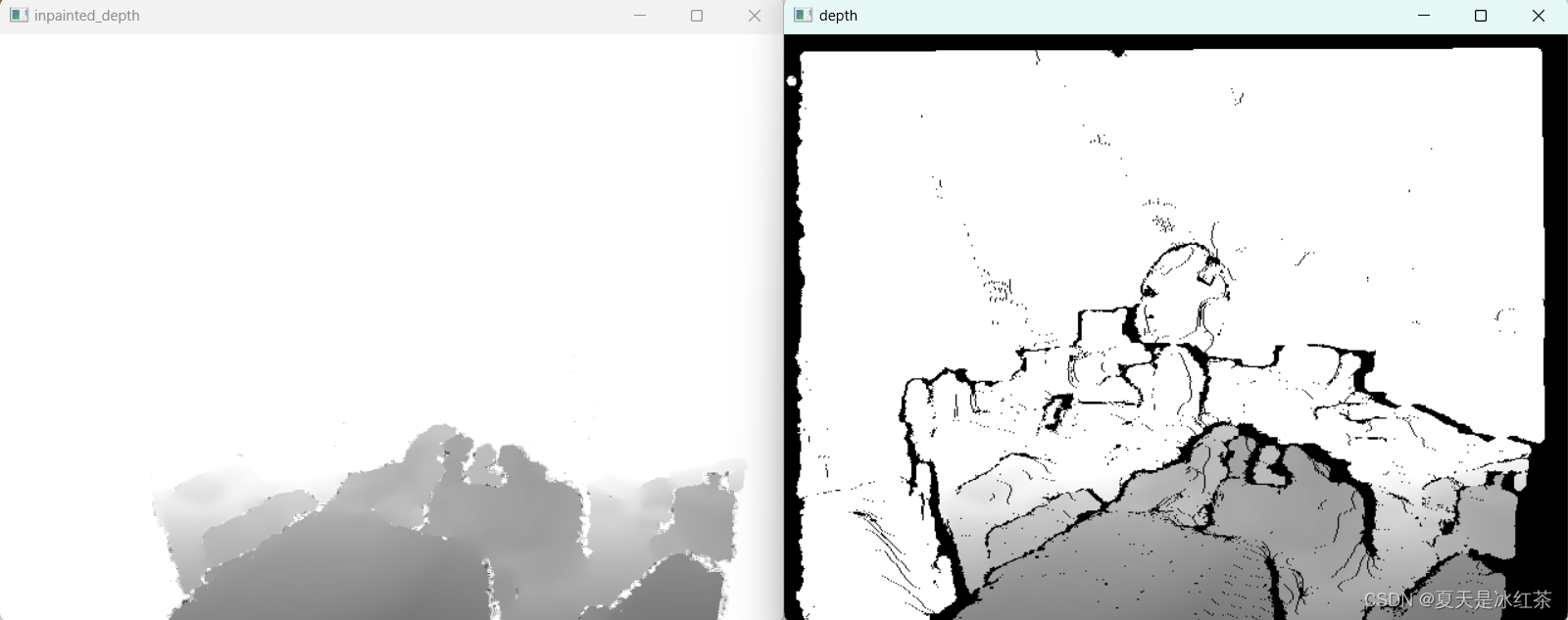
白色区域部分并不是没有信息,可以使用np.unique打印出来看看,此图经过处理后有15712个不同的值,相对来说比较合理
参考文章
Intel Realsense D435 深度图为什么会出现残影?(Invalid Depth Band 无效深度带)(黑洞)_realsense 深度图无效值-CSDN博客
Realsense相机在linux下的配置使用,RGB与depth图像对齐_librealsense-CSDN博客
深度相机的坑_结构光相机深度信息缺失-CSDN博客
相关文章:
D455相机RGB与深度图像对齐,缓解相机无效区域的问题
前言 上一次我们介绍了深度相机D455的使用:intel深度相机D455的使用-CSDN博客,我们也看到了相机检测到的无效区域。 在使用Intel深度相机D455时,我们经常会遇到深度图中的无效区域。这些无效区域可能由于黑色物体、光滑表面、透明物体以及视…...
2024 cicsn ezbuf
文章目录 参考protobuf逆向学习复原结构思路exp 参考 https://www.y4ng.cn/posts/pwn/protobuf/#ciscn-2024-ezbuf protobuf 当时压根不知道用了protobuf这个玩意,提取工具也没提取出来,还是做题做太少了,很多关键性的结构都没看出来是pro…...
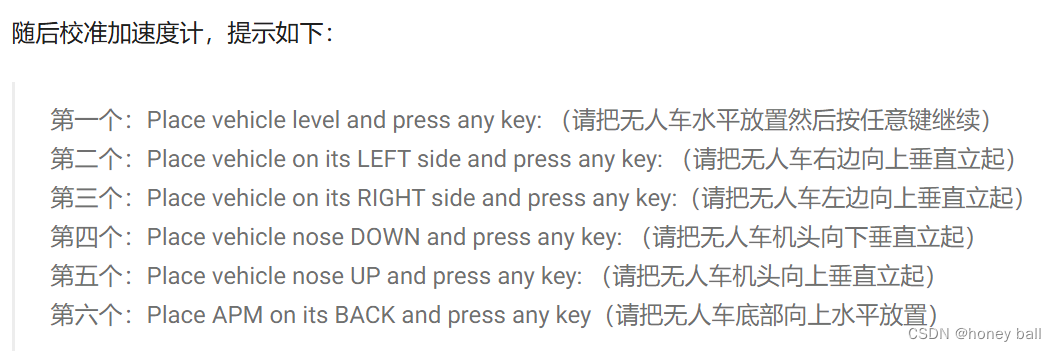
地面站Mission planner
官方教程; Mission Planner地面站介绍 | Autopilot (gitbook.io) Mission Planner 功能/屏幕 — Mission Planner 文档 (ardupilot.org) 安卓或者windows软件下载地址: 地面站连接及使用 plane (cuav.net) 在完全装机后再进行各干器件的校准,没有组…...
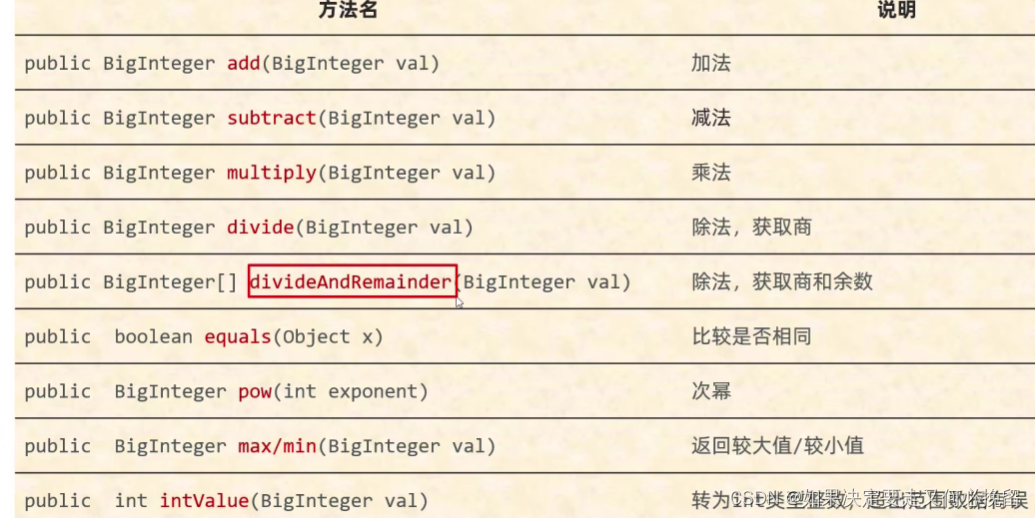
常见的api: BigInteger
一.获取一个大的随机整数 1.代码: BigInteger bd1 new BigInteger(4, new Random());System.out.println(bd1); 2.打印的结果:2 3.注释获取的是0-16之间的随机整数 二.获取一个指定的大的数 1.代码: BigInteger bd2 new BigInteger("100");System.o…...

Overall timing accuracy 和Edge placement accuracy 理解
在电子设计自动化(EDA)、集成电路(IC)制造和高速数字电路设计领域,"Overall Timing Accuracy" 和 "Edge Placement Accuracy" 是两个关键的性能指标,它们对于确保电路的功能正确性和性能至关重要。 当涉及到“Overall timing accuracy”(总体时序精度)…...
2024 vite 静态 scp2 自动化部署
1、导入库 npm install scp2 // 自动化部署 npm install chalk // 控制台输出的语句 npm install ora2、核心代码 创建文件夹放在主目录下的 deploy/index.js 复制粘贴以下代码: import client from scp2; import chalk from chalk; import ora from ora;const s…...
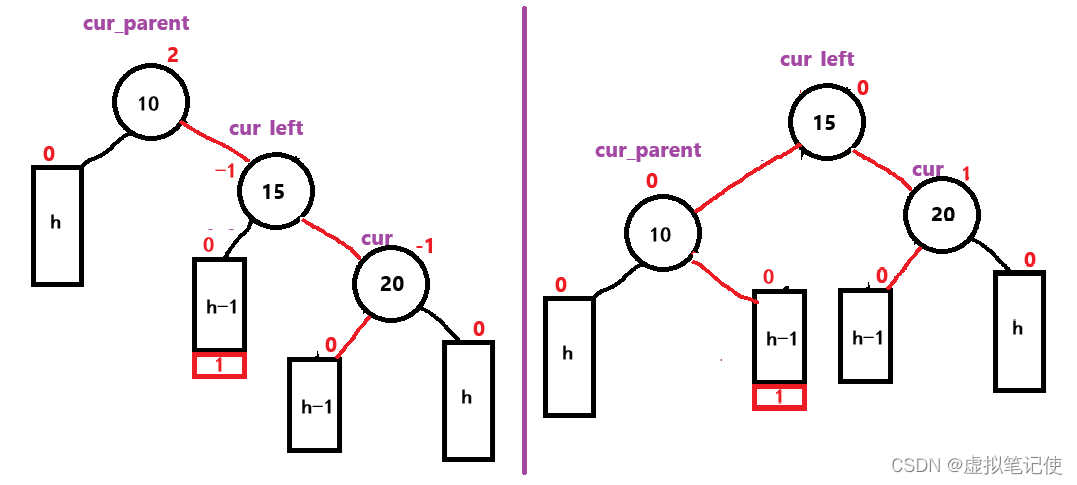
【数据结构】AVLTree实现详解
目录 一.什么是AVLTree 二.AVLTree的实现 1.树结点的定义 2.类的定义 3.插入结点 ①按二叉搜索树规则插入结点 ②更新平衡因子 更新平衡因子情况分析 ③判断是否要旋转 左单旋 右单旋 左右单旋 右左双旋 4.删除、查找和修改函数 查找结点 三.测试 1.判断是否是搜索树 …...
深度学习——TensorBoard的使用
官方文档torch.utils.tensorboard — PyTorch 2.3 documentation TensorBoard简介 TensorBoard是一个可视化工具,它可以用来展示网络图、张量的指标变化、张量的分布情况等。特别是在训练网络的时候,我们可以设置不同的参数(比如࿱…...
⭐⭐⭐)
【设计模式】观察者模式(行为型)⭐⭐⭐
文章目录 1.概念1.1 什么是观察者模式1.2 优点与缺点 2.实现方式3. Java 哪些地方用到了观察者模式4. Spring 哪些地方用到了观察者模式 1.概念 1.1 什么是观察者模式 观察者模式(Observer Pattern)是一种行为型设计模式,它允许对象在状态改…...

轻松搞定阿里云域名DNS解析
本文将会讲解如何设置阿里云域名DNS解析。在进行解析设置之前,你需要提前准备好需要设置的云服务器IP地址、域名以及CNAME记录。 如果你还没有云服务器和域名,可以参考下面的方法注册一个。 申请域名:《Namesilo域名注册》注册云服务器&…...

GAT1399协议分析(10)--单图像删除
一、官方接口 由于批量删除的接口,图像只能单独删除。 二、wireshark实例 这个接口比较简单,调用request delete即可 文本化: DELETE /VIID/Images/34078100001190001002012024060513561300065 HTTP/1.1 Host: 10.0.201.56:31400 User-Age…...

Hudi CLI 安装配置总结
前言 上篇文章 总结了Spark SQL Rollback, Hudi CLI 也能实现 Rollback,本文总结下 Hudi CLI 安装配置以及遇到的问题。 官方文档 https://hudi.apache.org/cn/docs/cli/ 版本 Hudi 0.13.0(发现有bug)、(然后升级)0.14.1Spark 3.2.3打包 mvn clean package -DskipTes…...
实验八、地址解析协议《计算机网络》
水逆退散,学业进步,祝我们都好,不止在夏天。 目录 一、实验目的 二、实验内容 (1)预备知识 (2)实验步骤 三、实验小结 一、实验目的 完成本练习之后,您应该能够确定给定 IP 地…...

Linux系统管理磁盘管理003
操作系统: CentOS Stream9 测试过程: 模拟磁盘被沾满, 创建文件 测试脚本 for i in seq 10do# echo $idd if/dev/zero of./$i-$RANDOM.txt bs1M count1024 Done[rootlocalhost ~]# vim 2.txt [rootlocalhost ~]# sh 2.txt 记录了10240 的…...

MLC工具是否适用AMD和ARM场景?如何测试内存性能?
MLC(Memory Latency Checker)主要是由Intel开发的工具,主要用于Intel平台上的内存性能测试,尤其是针对Intel处理器的内存延迟和带宽。尽管MLC主要针对Intel处理器设计,理论上它可以在任何支持Intel兼容指令集的系统上运…...

NodeJs实现脚本:将xlxs文件输出到json文件中
文章目录 前期工作和依赖笔记功能代码输出 最近有一个功能,将json文件里的内容抽取到一个xlxs中,然后维护xlxs文件。当要更新json文件时,就更新xlxs的内容并把它传回json中。这个脚本主要使用NodeJS写。 以下是完成此功能时做的一些笔记。 …...

【启程Golang之旅】网络编程与反射
欢迎来到Golang的世界!在当今快节奏的软件开发领域,选择一种高效、简洁的编程语言至关重要。而在这方面,Golang(又称Go)无疑是一个备受瞩目的选择。在本文中,带领您探索Golang的世界,一步步地了…...

nginx location正则表达式+案例解析
1、nginx常用的正则表达式 ^ :匹配输入字符串的起始位置$ :匹配输入字符串的结束位置 *:匹配前面的字符零次或多次。如“ol*”能匹配“o”及“ol”、“oll” :匹配前面的字符一次或多次。如“ol”能匹配“ol”及“oll”、“olll”…...

【YOLO系列】YOLOv10论文超详细解读(翻译 +学习笔记)
前言 研究AI的同学们面对的一个普遍痛点是,刚开始深入研究一项新技术,没等明白透彻,就又迎来了新的更新版本——就像我还在忙着逐行分析2月份发布的YOLOv9代码,5月底清华的大佬们就推出了全新的v10。。。 在繁忙之余࿰…...

植物大战僵尸杂交版2024潜艇伟伟迷
在广受欢迎的游戏《植物大战僵尸》的基础上,我最近设计了一款创新的杂交版游戏,简直是太赞了!这款游戏结合了原有游戏的塔防机制,同时引入新的元素、角色和挑战,为玩家提供了全新的游戏体验。 植物大战僵尸杂交版最新绿…...

逻辑表达式与真值表转换
逻辑表达式与真值表转换 真值表与逻辑表达式是数字电路设计的两种等价表示,掌握它们之间的转换是基本功。 🎯 本章学习要点 理解真值表的结构和表示方法掌握从真值表写出逻辑表达式(最小项之和)掌握从逻辑表达式列出真值表了解最…...

信发系统-排版/发布 配置操作教程-智慧大屏幕—东方仙盟
政务大屏幕节目管理-选择系统模板选择对应行业选择适合的模板选中你的节目点击设计设计节目直接管理/上传 资源:图片/视频/网页/文字/文档手指/鼠标选中显示区域上传资源,在右侧点击上传从资源库选择图片选择历史素材上传网站选中网页区域点击上传配置文…...
)
MATLAB图像处理实战:用imfindcircles函数搞定工业零件瑕疵检测(附完整代码)
MATLAB图像处理实战:工业零件瑕疵检测的精准圆识别技术 在工业自动化质检领域,圆形特征的精准检测直接关系到产品质量控制的可靠性。轴承、垫片、齿轮等标准件上的孔洞缺失或尺寸偏差,往往预示着潜在的产品缺陷。传统人工检测不仅效率低下&am…...

用Qt快速搭建一个局域网文件传输工具:QTcpServer/QTcpSocket完整项目实战
用Qt快速搭建一个局域网文件传输工具:QTcpServer/QTcpSocket完整项目实战 在数字化办公场景中,局域网文件传输是高频刚需。想象这样的场景:会议室里需要快速共享设计稿,实验室多台设备要同步采集数据,或者家庭网络中手…...

FPGA上做图像压缩,别从零造轮子!聊聊DCT那些开源IP核与设计技巧
FPGA图像压缩实战:DCT开源IP核选型与架构优化指南 在嵌入式视觉系统开发中,JPEG图像压缩是FPGA工程师经常遇到的需求场景。当项目周期紧张且资源有限时,明智的开发者会优先考虑利用经过验证的开源IP核,而非从零开始实现离散余弦变…...

Ubuntu16.04高效桌面管理全攻略:多工作区、分屏与终端Terminator进阶技巧
1. Ubuntu16.04多工作区高效管理 刚接触Ubuntu时,最让我惊喜的功能就是多工作区。这个功能相当于给你的电脑桌面"扩容",把不同任务分散到不同虚拟桌面,再也不用在一堆窗口里来回切换了。在Ubuntu16.04上设置多工作区特别简单&#…...

开发者个人网站搭建指南:从静态站点生成器到部署实战
1. 项目概述:一个为开发者量身定制的“数字家园” 在代码的海洋里泡久了,我们开发者总会遇到一个不大不小的痛点:如何高效、优雅地展示自己的技术栈、项目作品和个人思考?GitHub的README.md固然是标配,但它更像一份静态…...

CANN/asc-devkit FreeAllEvent API文档
FreeAllEvent 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode.c…...

告别激活烦恼:KMS_VL_ALL_AIO智能激活脚本的终极解决方案
告别激活烦恼:KMS_VL_ALL_AIO智能激活脚本的终极解决方案 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 你是否曾经为Windows系统激活而烦恼?或者为Office办公软件的激活…...

如何快速掌握MRIcroGL:医学影像三维可视化的完整指南
如何快速掌握MRIcroGL:医学影像三维可视化的完整指南 【免费下载链接】MRIcroGL v1.2 GLSL volume rendering. Able to view NIfTI, DICOM, MGH, MHD, NRRD, AFNI format images. 项目地址: https://gitcode.com/gh_mirrors/mr/MRIcroGL MRIcroGL是一款功能强…...