迷宫最短路径求解--c++
【代码】
#include<iostream>
#include<queue>
#include<stack>
using namespace std;
#define ROW 8
#define COL 8
//测试迷宫数据
int maze[ROW][COL] = {{0,0,0,1,0,0,0,0},{0,1,0,1,0,1,0,1},{0,1,0,0,0,1,0,1},{0,1,0,1,1,1,0,1},{0,1,0,1,1,0,0,0},{0,1,1,0,0,0,1,1},{0,0,0,0,1,0,1,1},{1,1,1,0,0,0,0,0}
};typedef struct
{int index; //当前点在路径结点数组中的位置int parent_idx; //当前经过点的上一个点在路径结点数组中的位置int x, y; //当前点的坐标
}PathNode;
//迷宫中每个点第一次出现时放入数组,为后续查找路径提供信息
PathNode path[ROW * COL];
//已访问数组,表示每个点是否已被访问
bool vis[ROW][COL] = { false };
//方向结构体
typedef struct
{int xstep, ystep;
}Dir;
Dir dir[4] = { {-1,0},{0,-1},{1,0},{0,1} };
bool validate(int x, int y)
{return x >= 0 && x < ROW && y >= 0 && y < COL;
}
//根据出口结点反向查找路径
void identifyPath(PathNode node)
{stack<PathNode>s;int skips = 0;//从最后一个节点逐次入栈,反向找到最短路径上的每个点while (true){s.push(node);if (node.parent_idx == -1)break;node = path[node.parent_idx];}cout << "path:" << endl;while (!s.empty()){node = s.top();s.pop();cout << "(" << node.x << "," << node.y << ")";if (!s.empty()){skips++;cout << "->";}}cout << endl;cout << "path length:" << skips << endl;
}//寻找以(sx,xy)为起点,(ex,ey)为出口的迷宫路径
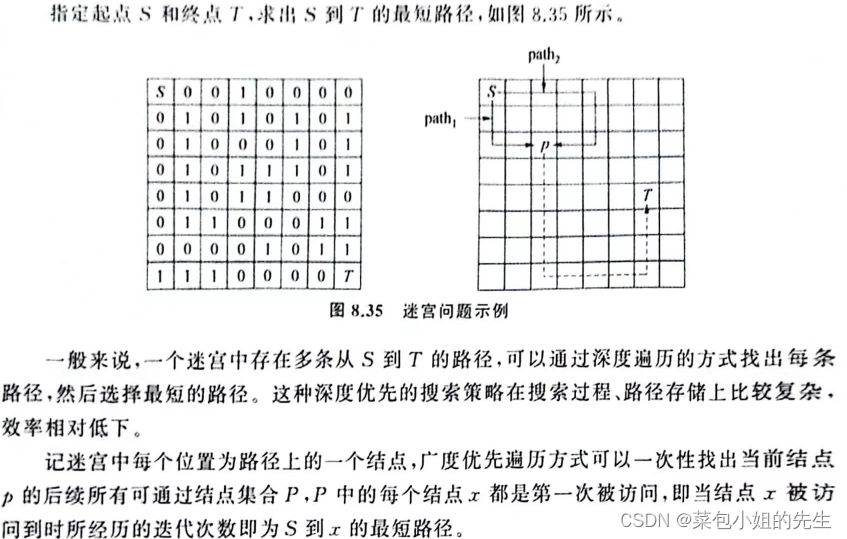
//使用图的广度优先遍历,从起点开始逐层往外扩散,直到出现出口坐标
void findShortestPath(int sx, int sy, int ex, int ey)
{PathNode pn;int idx = 0;int cnt = 0;//初始化,生成开始结点信息,并放入路径数组中pn.parent_idx = -1;pn.x = sx;pn.y = sy;pn.index = 0;vis[pn.x][pn.y] = true;path[cnt++] = pn;while (1){//找出队列中未访问的第一个元素PathNode node = path[idx++];//搜索四个方向,形成下一步可以通过的坐标for (int j = 0; j < 4; j++){int newx = node.x + dir[j].xstep;int newy = node.y + dir[j].ystep;//如果下一步坐标合法,未被访问且可以通过if (validate(newx, newy) && !vis[newx][newy] && maze[newx][newy] == 0){//生成新的结点PathNode pn;pn.x = newx;pn.y = newy;pn.parent_idx = node.index;pn.index = cnt;//如果为新的结点为出口,确定路径并返回if (newx == ex && newy == ey){identifyPath(pn);return;}//将新的结点放入路径数组中path[cnt++] = pn;//设置该结点已被访问过vis[newx][newy] = true;}}//如果遍历完所有的结点都没有找到出口,说明没有路径if (idx == cnt){cout << "no solution" << endl;break;}}
}int main()
{findShortestPath(0, 0, ROW - 1, COL - 1);return 0;
}相关文章:
迷宫最短路径求解--c++
【代码】 #include<iostream> #include<queue> #include<stack> using namespace std; #define ROW 8 #define COL 8 //测试迷宫数据 int maze[ROW][COL] {{0,0,0,1,0,0,0,0},{0,1,0,1,0,1,0,1},{0,1,0,0,0,1,0,1},{0,1,0,1,1,1,0,1},{0,1,0,1,1,0,0,0},{0…...
SpringFramework总结
一.SpringFramework介绍 (一)Spring 广义上的 Spring 泛指以 Spring Framework 为基础的 Spring 技术栈。 Spring 已经不再是一个单纯的应用框架,而是逐渐发展成为一个由多个不同子项目(模块)组成的成熟技术,例如 Spring Frame…...

品牌与产品:消费者决策的经济逻辑与品牌宣传的战略意义
在当今日益全球化的经济环境中,品牌与产品之间的关系对于企业的成功与否起着至关重要的作用。然而,在消费者做出购买决策时,他们到底是在选择产品本身,还是在选择附着在产品之上的品牌价值?同样,当客户选择…...

MFC四种方法编写多线程
本文以四个demo为例,对MFC的多线程进行学习。学习的过程中写了四个demo,将其做成笔记,发布在csdn上面。 mfc多线程demo1 volatile BOOL m_bRun; CEdit* edit; void ThreadFunc(){CTime time;CString strTime;m_bRun true;while(m_bRun){ti…...

VPN简介
一、VPN 概念定义 VPN,即虚拟专用网络(Virtual Private Network),依靠ISP(Internet Service Provider)和NSP(Network Service Provider)在公共网络中建立的虚拟专用通信网络&#x…...

【C/C++】用C语言写一个数据仓库,存储和修改数据
这个代码实现了一个简单的数据仓库,其中数据被存储在一个3x3的二维数组中。用户可以通过控制台界面与这个数据仓库进行交互,可以选择查看数据或者修改数据。 基础版源码: #include <stdio.h>#define HOUSESIZE 3 int arr[HOUSESIZE][…...

YOLO v5与YOLO v8框图比较
1. 介绍 YOLO (You Only Look Once) 是一个用于目标检测的卷积神经网络模型,以其高精度、高速度和易用性著称。YOLO v5 是目前最流行的 YOLO 版本之一,而 YOLO v8 是 YOLO 的最新版本。 2. 原理详解 YOLO 系列模型的基本原理是将目标检测任务转化为图…...
Redis集群(5)
集群原理 节点通信 通信流程 在分布式存储系统中,维护节点元数据(如节点负责的数据、节点的故障状态等)是关键任务。常见的元数据维护方式分为集中式和P2P方式。Redis集群采用P2P的Gossip协议,这种协议的工作原理是节点之间不断…...

STM32H5 DAC 配置
STM32 H5 DAC的详细初始化过程可以分为以下几个步骤,以下是根据参考文章和相关资料整理的具体步骤和参数设置: 1、使能相关时钟: 使能GPIOA(或其他对应DAC输出引脚的GPIO端口)的时钟。这通常是通过调用RCC_APB2Perip…...
第十九节:暴力递归到动态规划
一 动画规划的概念 优化出现重复解的递归 一旦写出递归来,改动态规划就很快 尝试策略和状态转移方程是一码事 学会尝试是攻克动态规划最本质的能力 如果你发现你有重复调用的过程,动态规划在算过一次之后把答案记下来,下回在越到重复调用过程…...

服务器部署spring项目jar包使用bat文件,省略每次输入java -jar了
echo off set pathC:\Program Files\Java\jre1.8.0_191\bin START "YiXiangZhengHe-8516" "%path%/java" -Xdebug -jar -Dspring.profiles.activeprod -Dserver.port8516 YiXiangZhengHe-0.0.1-SNAPSHOT.jar 将set path后面改成jre的bin文件夹 START 后…...

2024备忘知识点
1. adb shell dumpsys package f |grep fin 过滤查找指纹服务 1. adsp write /sys/kernel/boot_adsp/boot 1 Please change replace dev_dbg into dev_err in kernel file adsp-loader.c. Then check whether "write /sys/kernel/boot_adsp/…...

JS基础与高级应用: 性能优化
在现代Web开发中,性能优化已成为前端工程师必须掌握的核心技能之一。本文从URL输入到页面加载完成的全过程出发,深入分析了HTTP协议的演进、域名解析、代码层面性能优化以及编译与渲染的最佳实践。通过节流、防抖、重复请求合并等具体技术手段࿰…...
Python | Leetcode Python题解之第145题二叉树的后序遍历
题目: 题解: class Solution:def postorderTraversal(self, root: TreeNode) -> List[int]:def addPath(node: TreeNode):count 0while node:count 1res.append(node.val)node node.righti, j len(res) - count, len(res) - 1while i < j:res…...

公司面试题总结(二)
7. 说说 JavaScript 中的数据类型?存储上的差别? • 基本类型: o Number o String o Boolean o Undefined o null o symbol • 引用类型 o Object o Array o Function • 声明变量时不同的内存地址分配: o 简单类型的…...

人脸识别和 ArcFace:用于深度人脸识别的附加角边际损失
在本文中,您将发现一种 ArcFace 方法,该方法可获得用于人脸识别的高分辨特征。阅读本文后,你将了解: 人脸识别任务如何工作。如何计算人脸匹配。SoftMax 和 ArcFace 的直观区别。ArcFace 的几何解释。ArcFace 背后的数学原理本文假定您已经熟悉用于多类分类、检测和 SoftMax…...

双标引领:汽车软件安全的ASPICE与ISO21434之道
随着汽车行业的飞速发展,尤其是智能化、网联化趋势的加剧,汽车软件开发的复杂性和安全性需求日益提升。在这样的背景下,ASPICE标准和ISO21434安全标准应运而生,为汽车软件的开发和管理提供了坚实的支撑。 ASPICE(Auto…...

再度牵手,制造升级 | 毅达科技IMS OS+通用产品集+行业套件项目正式启动!
在数字化与智能制造的浪潮中,制造业企业纷纷加快转型步伐,力求通过技术创新实现生产效率与质量的双重提升。近日,广东毅达医疗科技股份有限公司(以下简称“毅达科技”)再次携手盘古信息,正式启动了IMS 数字…...

大疆智图_空三二维重建成果传输
一、软件环境 1.1 所需软件 1、 大疆智图:点击下载; 2、 ArcGIS Pro 3.1.5:点击下载,建议使用IDM或Aria2等多线程下载器; 3、 IDM下载器:点击下载,或自行搜索; 4、 Fas…...

python实现无人机航拍图片像素坐标转世界坐标
背景 已知相机参数(传感器宽度和高度、图像宽度和高度、焦距、相对航高、像主点坐标 ),在给定像素坐标的前提下,求世界坐标,大部分通过AI来实现,不知道哪个步骤有问题,望大家指正 脚本 impor…...

OBS多路推流插件技术深度解析:构建分布式直播分发系统的架构实践
OBS多路推流插件技术深度解析:构建分布式直播分发系统的架构实践 【免费下载链接】obs-multi-rtmp OBS複数サイト同時配信プラグイン 项目地址: https://gitcode.com/gh_mirrors/ob/obs-multi-rtmp 技术现状分析与行业痛点 在当前的实时流媒体生态中&#x…...

机器人伦理工程化:从道德困境到可解释决策系统的技术实现
1. 项目概述:当机器人需要做出道德抉择十年前,当我在实验室里调试一台协作机器人的碰撞检测算法时,一个从未预想过的问题出现了:在一条狭窄的通道里,机器人的移动路径上同时出现了一位匆忙的工程师和一个价值百万的实验…...

终极Windows右键菜单管理神器:ContextMenuManager让你的桌面效率提升300%
终极Windows右键菜单管理神器:ContextMenuManager让你的桌面效率提升300% 【免费下载链接】ContextMenuManager 🖱️ 纯粹的Windows右键菜单管理程序 项目地址: https://gitcode.com/gh_mirrors/co/ContextMenuManager 你是否曾经在Windows右键菜…...

STM32F103 IAP实战:从Bootloader设计到远程固件更新
1. 为什么你的STM32需要IAP升级? 第一次接触IAP(In-Application Programming)这个概念时,我正蹲在工厂车间的设备旁边,手里拿着需要升级的STM32板子发愁。产线上30台设备需要更新程序,而每台设备都要拆外壳…...

从机械奇观到数字逻辑:FPGA设计中的状态机与系统思维
1. 项目概述:当鲁布戈德堡机械遇见数字逻辑的灵魂我的一位老朋友杰伊道林最近给我分享了两段视频,看完之后,我的第一反应是“袜子都要被震飞了”——这让我认真考虑,是不是该换双带松紧带的袜子。这两段视频,一段是森林…...

从零构建ESP32+ILI9341触摸屏LVGL交互界面实战
1. 硬件选型与连接指南 第一次接触ESP32和ILI9341触摸屏时,最让我头疼的就是如何正确选择硬件并完成连接。经过多次实践,我总结出一套适合新手的硬件配置方案。ESP32开发板建议选择带有USB转串口芯片的版本,比如ESP32-DevKitC,这样…...

API集成管理之核心产品核心能力与数据盘点
API集成管理是企业数字化转型中的核心基础设施,它解决的是系统之间如何高效、安全、可控地进行数据交换与业务协同的问题。一套完善的API集成管理方案,能够帮助企业打通数据孤岛、实现能力复用、构建开放生态。本文基于公开资料,对五款代表性…...

AD覆铜时引脚‘粘’在一起了?别慌,三步排查法帮你搞定Modified Polygon和覆铜粘连
AD覆铜引脚粘连问题排查指南:从现象到解决方案的完整路径 在PCB设计过程中,覆铜操作看似简单却暗藏玄机。许多Altium Designer用户都曾遭遇过这样的场景:当你信心满满地完成布线,准备进行最后的覆铜操作时,突然发现不同…...

Go语言构建高效命令行工具集:从设计到工程化实践
1. 项目概述:一个“好用的”开源工具集最近在GitHub上闲逛,发现了一个挺有意思的仓库,叫ImGoodBai/goodable。光看这个名字,就透着一股子“实用主义”的气息——“好用的”。作为一名常年混迹于开源社区,喜欢折腾各种工…...

原生TypeScript待办清单:纯前端架构、观察者模式与拖拽排序实践
1. 项目概述:一个由AI辅助构思的现代化待办清单最近在整理个人项目时,我重新审视了一个之前用TypeScript写的待办清单应用。这个项目的初衷很简单:我需要一个极简、快速、完全由我掌控的待办工具,它不需要登录,数据就存…...