Linux驱动的同步阻塞和同步非阻塞
在字符设备驱动中,若要求应用与驱动同步,则在驱动程序中可以根据情况实现为阻塞或非阻塞
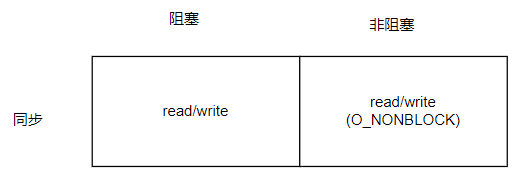
一、同步阻塞
这种操作会阻塞应用程序直到设备完成read/write操作或者返回一个错误码。在应用程序阻塞这段时间,程序所代表的进程并不消耗CPU的时间,因而从这个角度看,这种操作模式效率是非常高效的。为了支持这种I/O操作模式,设备驱动程序需要实现file_operations的read和wirte函数。
直接使用内核提供的API
驱动程序在实现阻塞型I/O时,可以直接使用内核提供的wait_event系统和wake_up系列函数,这些函数的核心设计建立在等待队列的基础上。
1)wait_event系统函数(等待在某一队列中直到某一条件满足)
wait_event_interrupt()
Linux内核中,该宏用来将当前调用它的进程睡眠等待在一个event上,直到进程被唤醒并且需要的condition条件为真。睡眠的进程状态时TASK_INTERRUPTIBLE的,这就意味着它可以被用户程序所中断而结束。但通常情况是等到的event事件发生了,它被唤醒重新加入到调度器的运行队列中等待下一次调度执行。
void init_wait_entry(struct wait_queue_entry *wq_entry, int flags)
{wq_entry->flags = flags;wq_entry->private = current;wq_entry->func = autoremove_wake_function;INIT_LIST_HEAD(&wq_entry->entry);
}
/*
1)init_wait_entry用来定义了一个名为“__wq_entry”的等待队列节点对象。__wq_entry中的
autoremove_wake_function函数在节点上的进程被唤醒时调用,private指向当前调用
wait_event_interruptible的进程。
2)prepare_to_wait_event用来完成睡眠前的准备工作,并且将__wq_entry节点加入到等待
队列wq中:__add_wait_queue(wq_head, wq_entry),该函数把__wq_entry节点接入到等到队列
中成为头节点后的第一个等待节点,所以后面进来的进程最先被唤醒;并把前进程状态设置为
TASK_INTERRUPTIBLE
3)prepare_to_wait_event之后进程仍然在调度器的运行队列中,当最后调用schedule()时,在
schedule这里调度器将把当前进程从它的运行队列中移除,schedule函数调用deactivate_task
函数来将当前任务从运行队列中移除,在多处理器系统中每个CPU都拥有自己的运行队列。
4)当condition为真时,通过break进入finish_wait,基本是prepare_to_wait_event的反向动作。
*/
#define ___wait_event(wq_head, condition, state, exclusive, ret, cmd) \
({ \__label__ __out; \struct wait_queue_entry __wq_entry; \long __ret = ret; /* explicit shadow */ \\init_wait_entry(&__wq_entry, exclusive ? WQ_FLAG_EXCLUSIVE : 0); \for (;;) { \long __int = prepare_to_wait_event(&wq_head, &__wq_entry, state);\\if (condition) \break; \\if (___wait_is_interruptible(state) && __int) { \__ret = __int; \goto __out; \} \\cmd; \} \finish_wait(&wq_head, &__wq_entry); \
__out: __ret; \
})/*schedule()作为cmd*/
#define __wait_event_interruptible(wq_head, condition) \___wait_event(wq_head, condition, TASK_INTERRUPTIBLE, 0, 0, \schedule())/*在condition不为真时,将睡眠在一个等待队列wq_head上,所以函数首先判断condition是否为真
如果为真,函数将直接返回,否则调用它的进程将通过__wait_event_interruptible最终进入睡眠
状态*/
#define wait_event_interruptible(wq_head, condition) \
({ \int __ret = 0; \might_sleep(); \if (!(condition)) \__ret = __wait_event_interruptible(wq_head, condition); \__ret; \
})由以上源码可以见wait_event_interruptable的表现形式时阻塞在了schedule()函数(kernel/sched/core.c)上直到进程下次被唤醒并被调度执行。当进程被唤醒时,继续从schedule下面执行(此时进程状态为TASK_RUNNING,所在的等待节点__wq_entry已经从wq中删除),通过contine继续for循环直到contion为真时通过break进入finish_wait。
wait_event()
该函数使调用的进程进入等待队列,赋予睡眠进程的状态是TASK_UNINTERRUPTIBLE。该函数与wait_event_interruptible的区别是,它使睡眠的进程不可被中断,而且当进程被唤醒时也不会检查是否有等待的信号需要处理。
wait_event_timeout()
该函数与wait_event的区别时,会指定一个时间期限,在指定的时间到达时将返回0。
wait_event_interruptible_timeout()
该函数与wait_event_interruptible的区别时,会指定一个时间期限,在指定的时间到达时将返回0。
2)wake_up系列和wake_up_interruptible系列函数
wake_up_interruptible()
用来唤醒一个等待队列上的睡眠进程
int try_to_wake_up(struct task_struct *p, unsigned int state, int wake_flags)
{
/*函数用p->state & state将wake_up系列函数中的进程状态与要唤醒的进程的状态进行检查,如果
p->state & state = 0的话那么唤醒操作返回0,是一次不成功的操作。因此可以看出
wake_up_interruptible只能唤醒通过wait_event_interruptible睡眠的进程。*/
}/*传入TASK_INTERRUPTIBLE的参数会在调用等待节点上的func,也就是autoremove_wake_function
会用到,实际的代码发生在try_to_wake_up函数里*/
#define wake_up_interruptible(x) __wake_up(x, TASK_INTERRUPTIBLE, 1, NULL)对于一个等待队列x, wake_up_interruptible(x)最后调用了__wake_up_common,后者通过list_for_each_entry_safe_from对等待队列x进行遍历,对于遍历过程的每个等待节点,都会调用该节点上的函数func,也就是前面的autoremove_wake_function函数,其主要功能是唤醒当前节点上的进程(把进程加入调度器的的运行队列,进程状态变为TASK_RUNNING),并将等待节点从等待队列删除,通常情况下函数都会成功返回1。
list_for_each_entry_safe_from(curr, next, &wq_head->head, entry) {unsigned flags = curr->flags;int ret;if (flags & WQ_FLAG_BOOKMARK)continue;ret = curr->func(curr, mode, wake_flags, key);if (ret < 0)break;if (ret && (flags & WQ_FLAG_EXCLUSIVE) && !--nr_exclusive)break;if (bookmark && (++cnt > WAITQUEUE_WALK_BREAK_CNT) &&(&next->entry != &wq_head->head)) {bookmark->flags = WQ_FLAG_BOOKMARK;list_add_tail(&bookmark->entry, &next->entry);break;}}从上面代码可以看到,如果想让函数遍历结束,必须满足以下三个条件:
负责唤醒进程的函数func成功返回;
等待节点的flags成员设置了WQ_FLAG_EXCLUSIVE标志,这个是排他性的,如果设置有该标志,那么唤醒当前节点上的进程后将不会再继续唤醒操作;
nr_exclusive等于1,nr_exclusive表示运行唤醒的排他性进程的数量。
在此可以将函数结束继续唤醒队列中的进程的条件简单归纳为:遇到一个排他性唤醒的节点并且当前允许排他性唤醒的进程数量为1。
其他一些wake_up系列/wake_up_interruptible系列函数
wake_up_interruptible函数在内核中同样有自己的一些变体,它们之间的主要区别除了TASK_INTERRUPTIBLE和TASK_UNINTERRUPTIBLE之外,在于每次调用时视图唤醒的进程数量,因为唤醒一个进程不存在timeout问题,所以没有类似类似wake_up_timeout这样的函数。
#define wake_up(x) __wake_up(x, TASK_NORMAL, 1, NULL)
#define wake_up_nr(x, nr) __wake_up(x, TASK_NORMAL, nr, NULL)
#define wake_up_all(x) __wake_up(x, TASK_NORMAL, 0, NULL)
#define wake_up_locked(x) __wake_up_locked((x), TASK_NORMAL, 1)
#define wake_up_all_locked(x) __wake_up_locked((x), TASK_NORMAL, 0)#define wake_up_interruptible(x) __wake_up(x, TASK_INTERRUPTIBLE, 1, NULL)
#define wake_up_interruptible_nr(x, nr) __wake_up(x, TASK_INTERRUPTIBLE, nr, NULL)
#define wake_up_interruptible_all(x) __wake_up(x, TASK_INTERRUPTIBLE, 0, NULL)
#define wake_up_interruptible_sync(x) __wake_up_sync((x), TASK_INTERRUPTIBLE)因为TASK_NORMAL在内核中的定义如下,所以wake_up可以取代wake_up_interruptible,也可以用来唤醒wait_event而睡眠的进程。
#define TASK_NORMAL (TASK_INTERRUPTIBLE | TASK_UNINTERRUPTIBLE)wake_up_nr和wake_up_all表示可以唤醒的排他性进程的数量,前者可以唤醒nr个这样的进程,后者可以唤醒队列中的所有排他性进程。wake_up则只能唤醒一个,当然对于非排他性节点上的进程,这些函数都会视图去唤醒它们。
对于wake_up_interruptible系列函数除了只能唤醒TASK_INTERRUPTIBLE状态的进程外,其他的功能和wake_up系列一样.
wake_up_locked和wake_up的唯一区别是,后者内部会使用等待队列自旋锁,而前者不会。所以如果使用wake_up_locked时需要自己考虑加锁问题。
wake_up_interruptible_sync用来保证调用它的进程不会被唤醒的进程所抢占而调度出处理器。
不直接使用内核提供的API
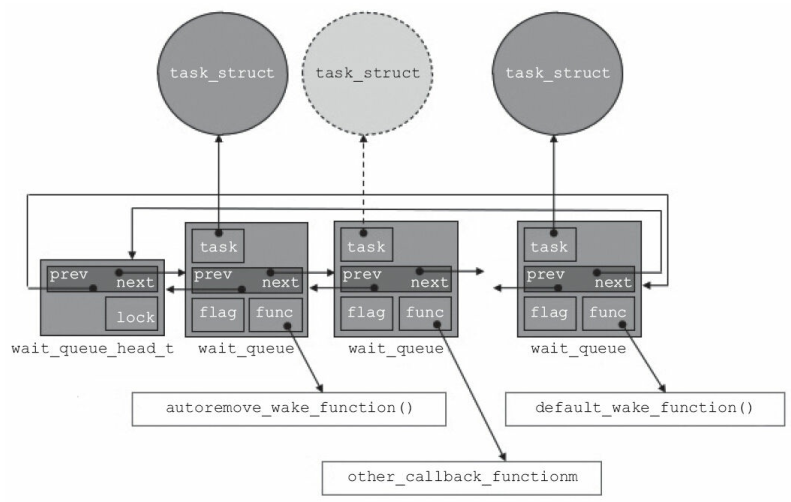
内核为以上讨论的wait_event/wake_up/wake_up_interrupt等系列函数中为等待队列提供了默认的操作模式。当然若不满足开发需求时驱动开发时可以按照wait_event和wake_up等函数的实现原理来构建自己的睡眠唤醒函数,比如一个典型的睡眠序列:
DECLARE_WAITQUEUE(wait, current); //定义一个等待节点wait
set_current_state(TASK_UNINTERRUPTIBLE); //设置进程状态
add_wait_queue(&xxx_wq, &wait); //将节点加入等待队列
schedule(); //让进程进入睡眠状态
remove_wait_queue(&xxx_wq, &wait); //唤醒以后将等待节点从队列移除DECLARE_WAITQUEUE、 add_wait_queue这两个动作加起来完成的效果如下图所示。 在wait_queue_head_t指向的链表上, 新定义的wait_queue元素被插入, 而这个新插入的元素绑定了一个task_struct(当前做xxx_write的current, 这也是DECLARE_WAITQUEUE使用“current”作为参数的原因) 。
二、同步非阻塞
这种操作模式下,用于要求以O_NONBLOCK标志的形式传达到驱动程序中,如果用户希望这是一个不能阻塞的操作,就需要在open这个文件时指定O_NONBLOCK或者在read/write前在指定的文件描述符上通过fcntl函数设置O_NONBLOCK标志。
比如这种情况下驱动程序可以通过传递到read/write函数的参数struct file *filp来获取这一信息:若用户指定了O_NONBLOCK的情形下,filp->f_flags & O_NONBLOCK的结果为真。在这种情况下如果设备不能立即完成用户程序所需的I/O操作,应该返回一个错误码(EAGAIN或EWOULDBLOCK,二者是同一个值)来宣告结束;否则应默认按照阻塞方式来进行。
#define EAGAIN 35 /* Try again */
#define EWOULDBLOCK EAGAIN /* Operation would block */相关文章:
Linux驱动的同步阻塞和同步非阻塞
在字符设备驱动中,若要求应用与驱动同步,则在驱动程序中可以根据情况实现为阻塞或非阻塞一、同步阻塞这种操作会阻塞应用程序直到设备完成read/write操作或者返回一个错误码。在应用程序阻塞这段时间,程序所代表的进程并不消耗CPU的时间&…...

LearnOpenGL-光照-5.投光物
本人刚学OpenGL不久且自学,文中定有代码、术语等错误,欢迎指正 我写的项目地址:https://github.com/liujianjie/LearnOpenGLProject 文章目录投光物平行光点光源聚光不平滑的例子平滑例子投光物 前面几节使用的光照都来自于空间中的一个点 即…...
【C语言】每日刷题 —— 牛客语法篇(1)
前言 大家好,今天带来一篇新的专栏c_牛客,不出意外的话每天更新十道题,难度也是从易到难,自己复习的同时也希望能帮助到大家,题目答案会根据我所学到的知识提供最优解。 🏡个人主页:悲伤的猪大…...

【深度学习】Subword Tokenization算法
在自然语言处理中,面临的首要问题是如何让模型认识我们的文本信息,词,是自然语言处理中基本单位,神经网络模型的训练和预测都需要借助词表来对句子进行表示。 1.构建词表的传统方法 在字词模型问世之前,做自然语言处理…...
五分钟了解支付、交易、清算、银行等专业名词的含义?
五分钟了解支付、交易、清算、银行等专业名词的含义?1. 支付类名词01 支付应用02 支付场景03 交易类型04 支付类型(按通道类型)05 支付类型(按业务双方类型)06 支付方式07 支付产品08 收银台类型09 支付通道10 通道类型…...

4个工具,让 ChatGPT 如虎添翼!
LightGBM中文文档 机器学习统计学,476页 机器学习圣经PRML中文版...

初识PO、VO、DAO、BO、DTO、POJO时
PO、VO、DAO、BO、DTO、POJO 区别分层领域模型规约DO(Data Object)DTO(Data Transfer Object)BO(Business Object)AO(ApplicationObject)VO(View Object)Query领域模型命名规约:一、PO :(persistant object ),持久对象二、VO :(value object) ࿰…...
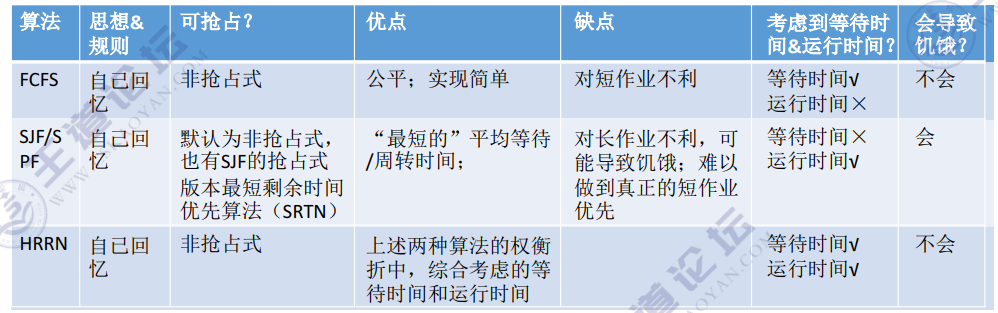
[2.2.4]进程管理——FCFS、SJF、HRRN调度算法
文章目录第二章 进程管理FCFS、SJF、HRRN调度算法(一)先来先服务(FCFS, First Come First Serve)(二)短作业优先(SJF, Shortest Job First)对FCFS和SJF两种算法的思考(三…...

【代码随想录Day55】动态规划
583 两个字符串的删除操作 https://leetcode.cn/problems/delete-operation-for-two-strings/72 编辑距离https://leetcode.cn/problems/edit-distance/...

Java开发 - 消息队列前瞻
前言 学完了Redis,那你一定不能错过消息队列,要说他俩之间的关联?关联是有的,但也不见得很大,只是他们都是大数据领域常用的一种工具,一种用来提高程序运行效率的工具。常见于高并发,大数据&am…...
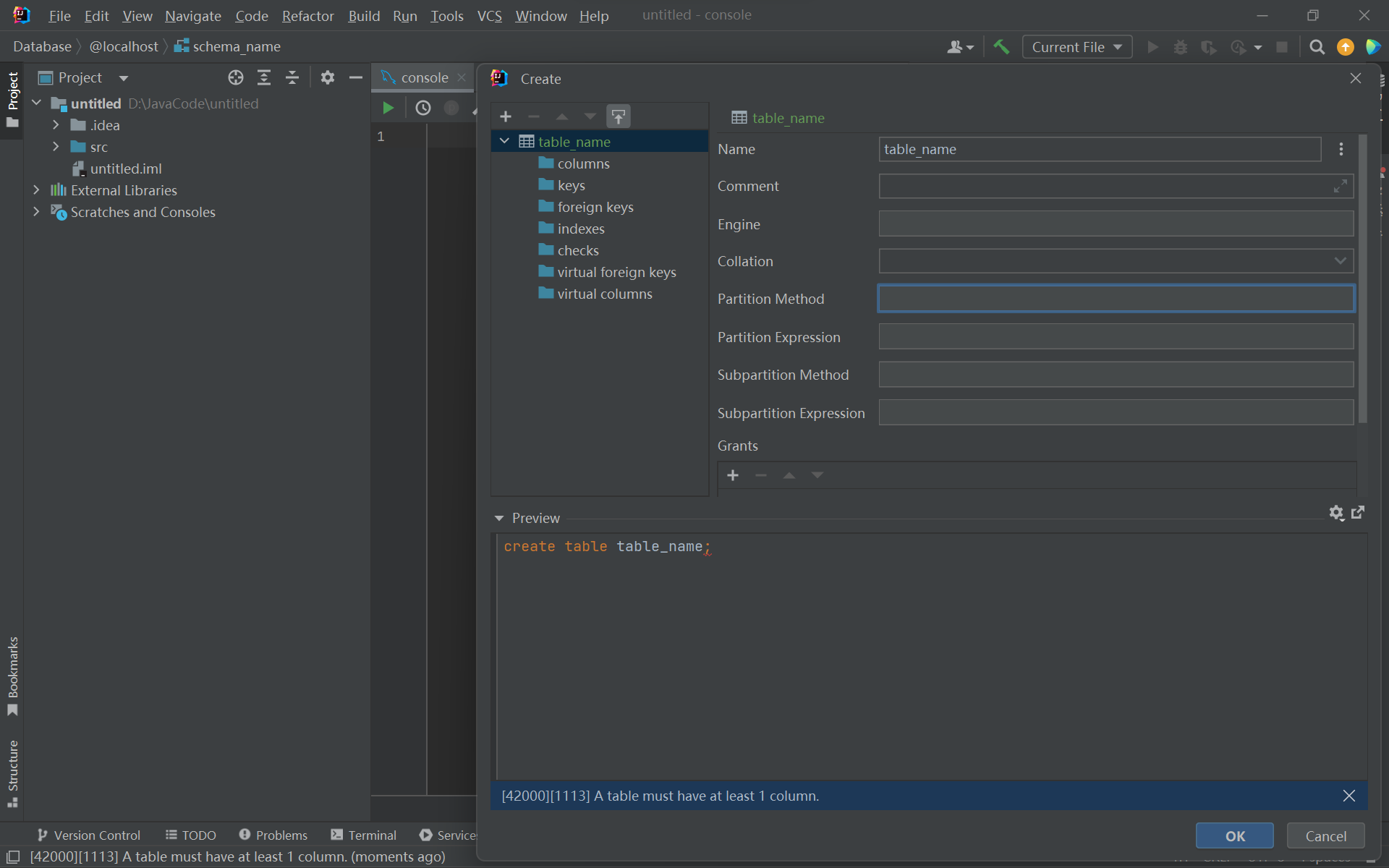
MySQL连接IDEA详细教程
使用IDEA的时候,需要连接Database,连接时遇到了一些小问题,下面记录一下操作流程以及遇到的问题的解决方法。 目录 MySQL连接IDEA详细教程 MySQL连接IDEA详细教程 打开idea,点击右侧的 Database 或者 选择 View --> Tool Wind…...
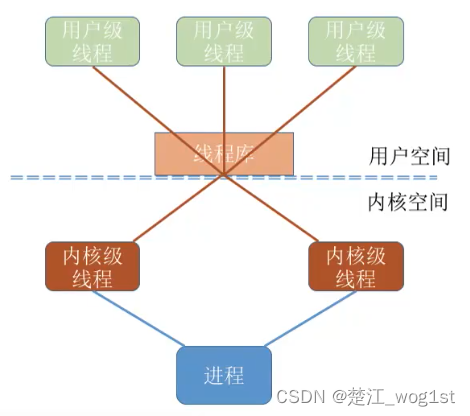
线程(操作系统408)
基本概念 我们说引入进程的目的是更好的使用多道程序并发执行,提高资源的利用率和系统吞吐量;而引入线程的目的则是减小程序在并发执行的时候所付出的时间开销,提高操作系统的并发性能。 线程可以理解成"轻量级进程",…...

功耗降低99%,Panamorph超清VR光学架构解析
近期,投影仪变形镜头厂商Panamorph获得新型VR显示技术专利(US11493773B2),该专利方案采用了紧凑的结构,结合了Pancake透镜和光波导显示模组,宣称比传统VR方案的功耗、发热减少99%以上,可显著提高…...
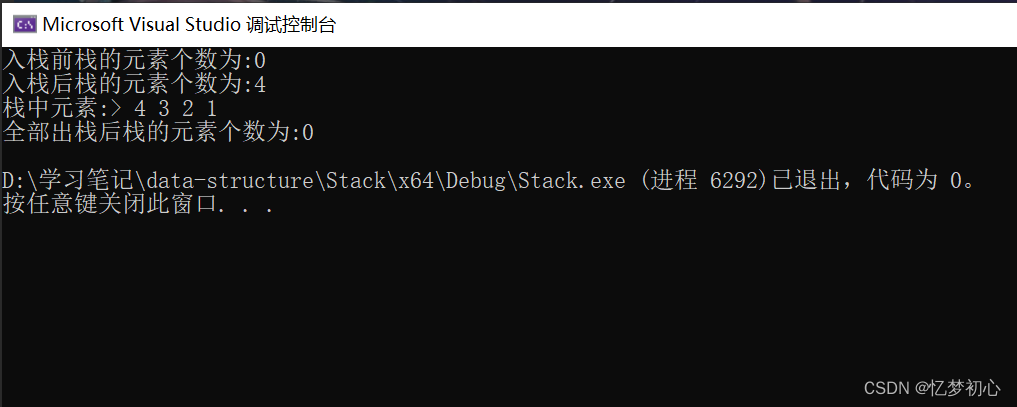
【数据结构】带你深入理解栈
一. 栈的基本概念💫栈是一种特殊的线性表。其只允许在固定的一端进行插入和删除元素的操作,进行数据的插入和删除的一端称作栈顶,另外一端称作栈底。栈不支持随机访问,栈的数据元素遵循后进先出的原则,即LIFOÿ…...
认识CSS之如何提高写前端代码的效率
🌟所属专栏:前端只因变凤凰之路🐔作者简介:rchjr——五带信管菜只因一枚😮前言:该系列将持续更新前端的相关学习笔记,欢迎和我一样的小白订阅,一起学习共同进步~👉文章简…...

Vue中watch和computed
首先这里进行声明,这个讲的是vue2的内容,在vue3发生了什么变动与此无关 这里是官网: https://v2.cn.vuejs.org/v2/guide/installation.html computed > 计算属性 watch > 侦听器(也叫监视器) 其区别如下&…...

华为鲲鹏+银河麒麟v10 安装 docker-ce
设备:硬件:仅有ARM处理器,无GPU和NPU,操作系统麒麟银河V10,Kunpeng-920 #######参考原链接######### 华为鲲鹏银河麒麟v10 安装 docker-ce 踩坑 - akiyaの博客 在 arm64(aarch64) 架构服务器上基于国产化操作系统安…...

Lambda,Stream,响应式编程从入门到放弃
Lambda表达式 Java8新引入的语法糖 Lambda表达式*(关于lambda表达式是否属于语法糖存在很多争议,有人说他并不是语法糖,这里我们不纠结于字面表述)*。Lambda表达式是一种用于取代匿名类,把函数行为表述为函数式编程风…...

C语言枚举使用技巧
什么是C语言枚举 C语言枚举是一种用户自定义数据类型,它允许程序员定义一个变量,并将其限制为一组预定义的常量。这些常量被称为“枚举值”,并且可以通过名称进行引用。 在C语言中,枚举值是整数类型,它们的值默认从0…...

保姆级使用PyTorch训练与评估自己的EfficientNetV2网络教程
文章目录前言0. 环境搭建&快速开始1. 数据集制作1.1 标签文件制作1.2 数据集划分1.3 数据集信息文件制作2. 修改参数文件3. 训练4. 评估5. 其他教程前言 项目地址:https://github.com/Fafa-DL/Awesome-Backbones 操作教程:https://www.bilibili.co…...

为AI智能体注入人类洞察:用户研究技能全链路实践指南
1. 项目概述:为AI智能体注入“人类洞察层”如果你正在构建或使用AI智能体,无论是Claude Code、Cursor还是其他基于代码的智能助手,你可能会发现一个核心瓶颈:这些智能体虽然能处理代码、分析数据,但在涉及产品决策、功…...

a16n:实现AI编程助手配置可移植性的插件化转换工具
1. 项目概述:AI编程助手配置的“翻译官”如果你和我一样,同时在使用 Cursor 和 Claude Code 这类 AI 编程工具,那你一定遇到过这个痛点:好不容易在 Cursor 里调教好了一套完美的.cursorrules文件,定义了代码风格、项目…...

《深入浅出通信原理》连载101-105
连载101:正弦信号的傅立叶变换连载102:直流信号的傅立叶变换连载103:复指数信号傅立叶变换的另外一种求法连载104:非周期信号的傅立叶变换连载105:傅立叶变换的对称性(一)...

保姆级排错:Keil里J-Link选项神秘消失?手把手教你定位GD32E23等ARM-M23内核芯片的调试器兼容问题
当Keil调试器选项消失时:深度解析ARM-M23内核芯片的调试兼容性问题 第一次在Keil的Debug配置界面发现J-Link选项神秘消失时,我盯着屏幕愣了几秒钟——前一天明明还能正常使用的工具链,怎么突然就"罢工"了?这种看似"…...

基于MCP协议与向量数据库的AI代码记忆系统实战指南
1. 项目概述:当AI助手拥有“长期记忆”最近在折腾AI应用开发的朋友,可能都遇到过同一个痛点:你让Claude或者GPT帮你分析一个复杂的代码库,第一次对话时,它能把项目结构、核心逻辑讲得头头是道。但当你第二天再打开聊天…...

ComfyUI-Impact-Pack完整安装指南:为什么你的V8版本功能不全?终极解决方案
ComfyUI-Impact-Pack完整安装指南:为什么你的V8版本功能不全?终极解决方案 【免费下载链接】ComfyUI-Impact-Pack Custom nodes pack for ComfyUI This custom node helps to conveniently enhance images through Detector, Detailer, Upscaler, Pipe, …...

STM32F103C8T6驱动5V LCD1602,开漏输出+上拉电阻的硬件连接与代码避坑指南
STM32F103C8T6驱动5V LCD1602的硬件设计与代码实战指南 当3.3V的STM32遇到5V供电的LCD1602模块时,电平不匹配问题常常让初学者头疼不已。本文将深入解析开漏输出配合上拉电阻的解决方案,通过硬件原理分析、示波器实测对比和完整代码示例,带你…...

MyBatis如何实现动态数据源切换?
MyBatis如何实现动态数据源切换 在现代应用中,特别是微服务架构中,使用多个数据库的情况越来越常见。MyBatis是一个流行的Java持久层框架,它允许我们方便地与多种数据库进行交互。在某些情况下,我们可能需要动态切换数据源&#x…...

从Kaggle竞赛到实战:基于XGBoost的Otto多分类产品识别系统构建
1. 从Kaggle竞赛到真实业务场景的跨越 第一次接触Otto数据集是在2015年的Kaggle竞赛上,当时只觉得这是个典型的多分类问题。直到去年为某跨境电商平台搭建商品自动分类系统时,我才真正理解这个案例的实战价值——90%的参赛者只关注模型精度,而…...

高级技巧:利用SharpShooter实现COM Staging和应用程序白名单绕过
高级技巧:利用SharpShooter实现COM Staging和应用程序白名单绕过 【免费下载链接】SharpShooter Payload Generation Framework 项目地址: https://gitcode.com/gh_mirrors/sh/SharpShooter SharpShooter 是一款功能强大的Payload生成框架,专为安…...