Astar路径规划算法复现-python实现
# -*- coding: utf-8 -*-
"""
Created on Fri May 24 09:04:23 2024"""import os
import sys
import math
import heapq
import matplotlib.pyplot as plt
import time'''
传统A*算法
'''class Astar:'''AStar set the cost + heuristics as the priorityAStar将成本+启发式设置为优先级'''def __init__(self, s_start, s_goal, heuristic_type, xI, xG):self.s_start = s_startself.s_goal = s_goalself.heuristic_type = heuristic_typeself.u_set = [(-1, 0), (0, 1), (1, 0), (0, -1)]# self.obs = self.obs_map() # 障碍物位置self.Open = [] # 优先级序列,open集合self.Closed = [] # 相邻点集合,访问visited序列self.parent = dict() # 相邻父节点self.g = dict() # 成本self.x_range = 51 # 设置背景大小self.y_range = 51self.xI, self.xG = xI, xGself.obs = self.obs_map()def animation(self, path_l, visited_l, name, path_color='g'):# 绘制地图基础元素obs_x = [x[0] for x in self.obs]obs_y = [x[1] for x in self.obs]plt.plot(self.xI[0], self.xI[1], "bs") # 起点plt.plot(self.xG[0], self.xG[1], "gs") # 终点plt.plot(obs_x, obs_y, "sk") # 障碍物plt.title(name)plt.axis("equal")# 移除起点和终点于visited_l列表中,避免它们被标记为已访问点visited_l = [node for node in visited_l if node != self.xI and node != self.xG]# 绘制所有已访问节点for x in visited_l:plt.plot(x[0], x[1], color='gray', marker='o')# 绘制路径path_x = [point[0] for point in path_l]path_y = [point[1] for point in path_l]plt.plot(path_x, path_y, linewidth=3, color=path_color)# 显示最终图形plt.show(block=True)def obs_map(self):"""Initialize obstacles' positions:return: map of obstacles初始化障碍物位置返回:障碍物"""x = 51y = 31self.obs = set()# 绘制边界self.obs.update((i, 0) for i in range(x))self.obs.update((i, y - 1) for i in range(x))self.obs.update((0, i) for i in range(y))self.obs.update((x - 1, i) for i in range(y))# 给出障碍物坐标集1self.obs.update((i, 15) for i in range(10, 21))self.obs.update((20, i) for i in range(15))# 给出障碍物坐标集2self.obs.update((30, i) for i in range(15, 30))# 给出障碍物坐标集3self.obs.update((40, i) for i in range(16))return self.obsdef searching(self):"""A_star Searching.:return: path, visited orderAstart搜索,返回路径、访问集,"""self.parent[self.s_start] = self.s_start # 初始化 起始父节点中只有起点。self.g[self.s_start] = 0 # 初始代价为0self.g[self.s_goal] = math.inf # 目标节点代价为无穷大# 将元素(self.f_value(self.s_start), self.s_start)插入到Open堆中,# 并保持堆的性质(最小堆中父节点的值总是小于或等于其子节点的值))# 这行代码的意思是:计算起始节点s_start的评估值f_value(self.s_start),# 然后将这对值(f_value, self.s_start)作为一个元组插入到self.Open这个最小堆中。# 这样做的目的是在诸如A*搜索算法等需要高效管理待探索节点的场景下,# 确保每次可以从堆顶(也就是当前评估值最小的节点)取出下一个待处理的节点。# 这对于寻找最短路径、最小成本解决方案等问题非常有用。heapq.heappush(self.Open, (self.f_value(self.s_start), self.s_start))while self.Open:# heappop会取出栈顶元素并将原始数据从堆栈中删除# 在这个例子中,heappop返回的元素假设是一个包含两个元素的元组,# 但代码中只关心第二个元素(实际的数据,比如一个状态、节点或其他任何类型的数据),# 所以用_占位符丢弃了第一个元素(通常是评估值或优先级),而把第二个元素赋值给了变量s_, s_current = heapq.heappop(self.Open) # s_current存储的是当前位置的坐标# print('栈顶元素为{0}'.format(s_current))self.Closed.append(s_current)if s_current == self.s_goal: # 迭代停止条件,判断出栈顶元素是否为目标点,如果为目标点,则退出break# 如果不是,更新该点附近的代价值# get_neighbor为获取附近点的坐标for s_next in self.get_neighbor(s_current):new_cost = self.g[s_current] + self.cost(s_current, s_next)if s_next not in self.g:self.g[s_next] = math.infif new_cost < self.g[s_next]:self.g[s_next] = new_costself.parent[s_next] = s_current# heappush入栈时需要存储的该点的代价值的计算方式为heapq.heappush(self.Open, (self.f_value(s_next), s_next))# self.animation(self.extract_path(self.parent), self.Closed, "A*")return self.extract_path(self.parent), self.Closeddef get_neighbor(self, s_current):""":param s_current::return: 相邻点集合"""return [(s_current[0] + u[0], s_current[1] + u[1]) for u in self.u_set]def cost(self, s_current, s_next):""":param s_current 表示当前点:param s_next 表示相邻点:return 若与障碍物无冲突,则范围欧式距离成本,否则为无穷大成本计算当前点与相邻点的距离成本"""# 判断是否与障碍物冲突if self.is_collision(s_current, s_next):return math.inf# 这里返回欧式距离成本return math.hypot(s_next[0] - s_current[0], s_next[1] - s_current[1])def is_collision(self, s_current, s_next):"""check if the line segment (s_start, s_end) is collision.:param s_current: start node:param s_next: end node:return: True: is collision / False: not collision检查起终点线段与障碍物是否冲突如果线段的起点或终点之一位于障碍物集合 self.obs 内,则直接判定为碰撞,返回 True。若线段不垂直也不水平(即斜线段),则分为两种情况检查:若线段为45度线(斜率为1:1或-1),则检查线段的端点形成的矩形框内是否有障碍物。否则检查线段端点形成的另一矩形框内是否有障碍物。若上述任一矩形框内有障碍,则判定为碰撞,返回 True若无碰撞情况,则返回 False"""# obs是障碍物,如果遇到障碍物,则距离(成本)无穷大if s_current in self.obs or s_next in self.obs:return True''''''# 如果该点s_start与相邻点s_end不相同if s_current[0] != s_next[0] and s_current[1] != s_next[1]:# 如果两点横纵坐标之差相等,即线段不垂直也不水平。135度线if s_next[0] - s_current[0] == s_current[1] - s_next[1]:s1 = (min(s_current[0], s_next[0]), min(s_current[1], s_next[1]))s2 = (max(s_current[0], s_next[0]), max(s_current[1], s_next[1]))# 如果两点横纵坐标之差不相等else:s1 = (min(s_current[0], s_next[0]), max(s_current[1], s_next[1]))s2 = (max(s_current[0], s_next[0]), min(s_current[1], s_next[1]))# obs是障碍物if s1 in self.obs or s2 in self.obs:return Truereturn Falsedef f_value(self, s_currrent):"""f = g + h. (g: Cost to come, h: heuristic value):param s: current state:return: f"""return self.g[s_currrent] + self.heuristic(s_currrent)def extract_path(self, parent):path = [self.s_goal]s = self.s_goalwhile True:s = parent[s]path.append(s)if s == self.s_start:breakreturn list(path)def heuristic(self, s_current):heuristic_type = self.heuristic_type # heuristic typegoal = self.s_goal # goal node# 如果为manhattan,则采用曼哈顿距离,s存储的是中间点if heuristic_type == "manhattan":return abs(goal[0] - s_current[0]) + abs(goal[1] - s_current[1])# 否则就是欧几里得距离,符合勾股定理else:return math.hypot(goal[0] - s_current[0], goal[1] - s_current[1])if __name__ == '__main__':time_start = time.time()s_start = (5, 5)s_goal = (45, 26)star_m = Astar(s_start, s_goal, "ee", s_start, s_goal)path, visited = star_m.searching()star_m.animation(path, visited, "A*") # animationtime_end = time.time()print("程序运行时间:", time_end - time_start)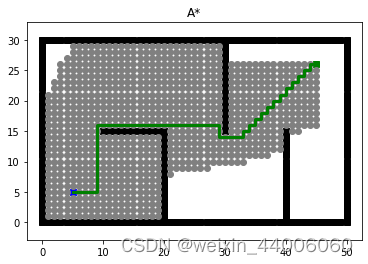
相关文章:
Astar路径规划算法复现-python实现
# -*- coding: utf-8 -*- """ Created on Fri May 24 09:04:23 2024"""import os import sys import math import heapq import matplotlib.pyplot as plt import time 传统A*算法 class Astar:AStar set the cost heuristics as the priorityA…...

低-零功率技术在军事中的应用
“低-零功率”概念最先由美国国防部提出,主要是针对诸如俄罗斯等大国的远程传感器,帮助美军破除“灰色地带挑衅”的威胁。由于“灰色地带”冲突仅依托小规模军事力量,其强度维持在不足以引发美国及其盟国进行直接干预的程度,因此&…...

【培训】企业档案管理专题(私货)
导读:通过该专题培训,可以系统了解企业档案管理是什么、为什么、怎么做。尤其是对档案的价值认知,如何构建与新质生产力发展相适应的企业档案工作体系将有力支撑企业新质生产力的发展,为企业高质量发展贡献档案力量,提…...
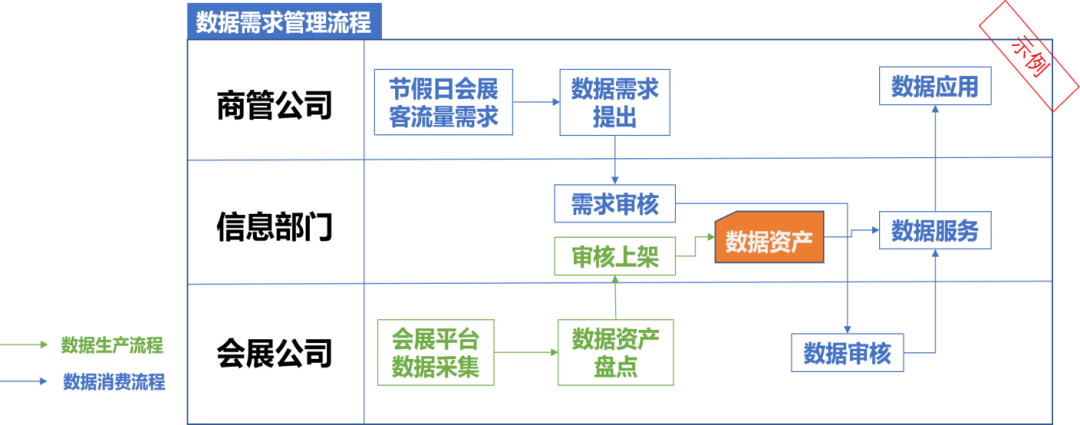
某国资集团数据治理落地,点燃高质量发展“数字引擎”
某国有资产经营控股集团为快速提升集团的内控管理能力和业务经营能力,以数字化促进企业转型的信息化建设势在必行。集团携手亿信华辰开启数据治理项目,在数据方面成功解决“哪里来、怎么盘、怎么管、怎么用”的问题,不断推动企业数字化转型…...
【AI测试版】)
2024.06.12【读书笔记】丨生物信息学与功能基因组学(第十四章 细菌和古细菌基因组 第二部分)【AI测试版】
读书笔记:《生物信息学与功能基因组学》第十四章 - 第二部分 摘要 第二部分深入讨论了基于不同标准的细菌和古细菌的分类方法,包括形态学、基因组大小和排列、生活方式以及与人类疾病的关系。此外,还探讨了基于核糖体RNA序列的分类方法&…...

企业数据API接口大全
一、工商信息 (1)精确获取企业唯一标识 根据企业名称、注册号或统一社会信用代码,获取企业唯一标识 (2)企业模糊查询 关键字名称模糊搜索匹配企业 (3)企业详情 根据企业唯一标识、企业名称…...

【HTML】格式化文本 pre 标签
文章目录 <pre> 元素中的文本以等宽字体显示,文本保留空格和换行符。 <pre> 元素支持 HTML 中的全局属性和事件属性。 示例: <pre> pre 元素中的文本 以等宽字体显示, 并且同时保留 空格 和 换行符。 </pre&…...
2813. 子序列最大优雅度)
力扣每日一题(2024-06-13)2813. 子序列最大优雅度
基于官方题解,进行补充说明 给你一个长度为 n 的二维整数数组 items 和一个整数 k 。 items[i] [profiti, categoryi],其中 profiti 和 categoryi 分别表示第 i 个项目的利润和类别。 现定义 items 的 子序列 的 优雅度 可以用 total_profit distinct_…...

MySQL -- 优化
1. 查询优化 使用索引 示例:有一个包含数百万用户的表,名为 users,常见的查询是通过 email 字段查找用户。 CREATE INDEX idx_email ON users(email);通过创建索引 idx_email,SELECT * FROM users WHERE email exampleexample…...

学会python——密码校验(python实例三)
目录 1、认识Python 2、环境与工具 2.1 python环境 2.2 pycharm编译 3、纠正密码输入的格式问题 3.1 代码构思 3.2 代码示例 3.3 运行结果 4、总结 1、认识Python Python 是一个高层次的结合了解释性、编译性、互动性和面向对象的脚本语言。 Python 的设计具有很强的可…...

【Python】中的X[:,0]、X[0,:]、X[:,:,0]、X[:,:,1]、X[:,m:n]、X[:,:,m:n]和X[: : -1]
Python中 x[m,n]是通过numpy库引用数组或矩阵中的某一段数据集的一种写法,m代表第m维,n代表m维中取第几段特征数据。 通常用法: x[:,n]或者x[n,:] X[:,0]表示对一个二维数组,取该二维数组第一维中的所有数据,第二维中取第0个数据。 X[0,:]使用类比前者。 举例说明: x[:,0…...

【Java基础】OkHttp 超时设置详解
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 推荐:kwan 的首页,持续学…...

巴西:海外媒体投放,大舍传媒实现企业与巴西媒体间的交流
引言 随着全球化的进程,海外市场的开拓对于企业的发展至关重要。巴西作为南美洲最大的经济体和人口大国,具有巨大的商机。在与巴西媒体的交流中,大舍传媒的投放成为了一种高效的宣传和合作途径。 巴西媒体的多样性 巴西媒体以其丰富多样的…...

MT7981B+MT7976C+MT7531A RF定频测试方法
1、从下面网址下载QA软件包,然后在WIN系统下安装QA环境。 https://download.csdn.net/download/zhouwu_linux/89428691?spm1001.2014.3001.5501 在WINDOWS 7系统下先安装WinPcap_4_1_3.exe。 2、搭建硬件环境,电脑先连接仪器,主板网络与电…...

支持微信支付宝账单,极空间Docker部署一个开箱即用的私人账本『cashbook』
支持微信支付宝账单,Docker部署一个开箱即用的私人账本『cashbook』 哈喽小伙伴好,我是Stark-C~ 不知道屏幕前的各位富哥富姐们有没有请一个专业的私人财务助理管理自己的巨额资产,我不是给大家炫耀,我在月薪300的时候就已经有了…...
异常检测方法
1 异常检测方法适用范围 什么时候我们需要异常点检测算法呢?常用的有三种情况。 1.做数据预处理的时候需要对异常的数据做过滤,防止对归一化等处理的结果。2.对没有标记输出的特征数据做筛选,找出异常的数据。3.对有标记输出的特征数据做二…...
在网站建设时,如何选择适合自己的网站模版
可以根据以下几个地方选择适合的网站模板 1.公司的核心业务 根据公司的业务内容来确定网站展示的内容之一,不同的业务内容可以有不同的展示方式,以此来确定网站的展示风格之一,公司肯定是要有明确的业务内容,并且能够在网站…...

rabbitmq单机安装及性能测试
RabbitMQ单机安装及性能测试 本文使用CentOS7.9安装RabbitMQ单机环境,并进行性能测试。 1. 安装RabbitMQ RabbitMQ依赖Erlang,版本配套关系参考官网:https://www.rabbitmq.com/docs/which-erlang。 本文安装RabbitMQ3.8.21,Erlang版本要求…...

字节流和字符流的区别
字节流和字符流的区别 字节流 **数据单位:**Byte为单位进行数据传输和处理。 **应用场景:**适用于所有类型的文件,包括视频、视频、音频等二进制文件,以及文本文件。 比如InputStrem和子类(FileInputStream&#x…...
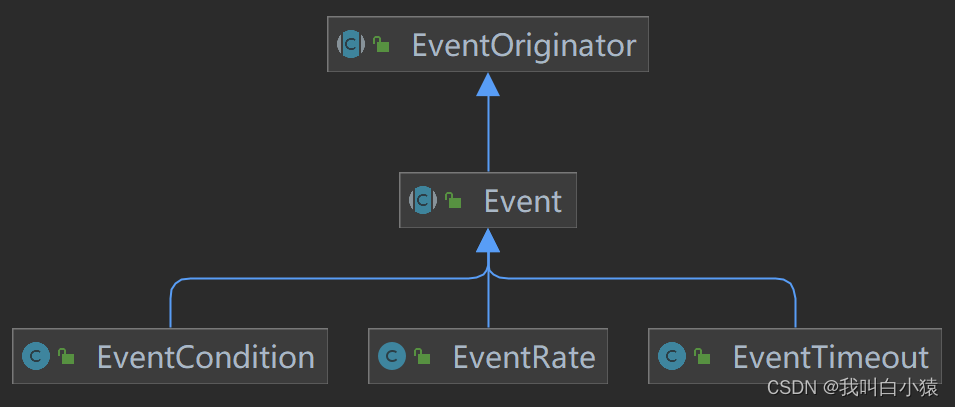
【仿真建模-anylogic】EventRate原理解析
Author:赵志乾 Date:2024-06-13 Declaration:All Right Reserved!!! 1. 类图 2. 原理解析 EventOriginator是Anylogic中各类事件的父类,对外暴露的接口主要有: 函数功能boolean isActive()判定…...

Mac Mouse Fix终极指南:让你的第三方鼠标在macOS上焕发新生
Mac Mouse Fix终极指南:让你的第三方鼠标在macOS上焕发新生 【免费下载链接】mac-mouse-fix Mac Mouse Fix - A simple way to make your mouse better. 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 还在为macOS上第三方鼠标功能受限而…...

龙虾为啥越养越贵,越用越蠢?极客老王揭秘Agent落地真相
进入2026年3月,科技圈的舆论风向标发生了一次剧烈偏移。曾经被誉为开启“AI代驾”时代的超级智能体OpenClaw(俗称“龙虾”),在经历了一年的野蛮生长后,正陷入一场空前的信任危机。根据最新的行业调研数据显示ÿ…...

UOS20远程桌面XRDP配置指南:告别黑屏卡顿,轻松实现Windows远程连接
UOS20远程桌面XRDP配置实战:从零搭建流畅的Windows远程控制环境 在混合办公成为常态的今天,跨平台远程控制需求激增。UOS20作为国产操作系统的代表,其XRDP服务能让Windows用户无缝接入,但配置过程中的黑屏、卡顿问题常令人却步。…...

InstructPix2Pix在.NET平台的应用开发实战
InstructPix2Pix在.NET平台的应用开发实战 1. 引言:当AI修图遇上.NET开发 想象一下这样的场景:电商平台的商品图片需要批量调整风格,摄影工作室想要快速实现创意效果,或者内容创作者需要即时编辑社交媒体图片。传统图像处理方式…...

攻克Godot资源提取难题:godot-unpacker工具的创新解法
攻克Godot资源提取难题:godot-unpacker工具的创新解法 【免费下载链接】godot-unpacker godot .pck unpacker 项目地址: https://gitcode.com/gh_mirrors/go/godot-unpacker 问题:为什么普通解压工具无法胜任PCK文件提取? Godot引擎打…...

[特殊字符] Local Moondream2图文对话教程:详细步骤实现自定义问题提问
Local Moondream2图文对话教程:详细步骤实现自定义问题提问 1. 引言:让电脑拥有"眼睛"的智能工具 你是否曾经希望电脑能像人一样看懂图片,并且回答关于图片内容的问题?Local Moondream2就是这样一款神奇的工具&#x…...

硬件调试新纪元:85%效率提升的AMD Ryzen系统优化方案
硬件调试新纪元:85%效率提升的AMD Ryzen系统优化方案 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: https://git…...

如何用d2s-editor高效管理暗黑破坏神2存档:终极可视化编辑指南
如何用d2s-editor高效管理暗黑破坏神2存档:终极可视化编辑指南 【免费下载链接】d2s-editor 项目地址: https://gitcode.com/gh_mirrors/d2/d2s-editor d2s-editor是一款免费开源的Web版暗黑破坏神2存档编辑器,它将复杂的二进制存档文件转化为直…...
)
Drone流水线进阶玩法:用.drone.yml实现多阶段构建+钉钉通知(2023最新版)
Drone流水线进阶实战:多阶段构建与智能通知全链路设计 当你的团队从单体架构转向微服务时,CI/CD流水线会突然变得复杂起来。上周我接手的一个电商项目就遇到了典型问题:每次代码提交后需要同时处理Java后端的Maven构建、前端Node.js打包、Doc…...

OpenClaw 网关重启指南:常用指令与故障修复
手把手教你一键部署OpenClaw,连接微信、QQ、飞书、钉钉等,1分钟全搞定! 一、几种快速重启的法子 看你当初是怎么部署的,挑下面最适合你的那条命令就行: 适用情况具体命令最省事的(系统托管模式ÿ…...