【附带源码】机械臂MoveIt2极简教程(六)、第三个demo -机械臂的避障规划
系列文章目录
【附带源码】机械臂MoveIt2极简教程(一)、moveit2安装
【附带源码】机械臂MoveIt2极简教程(二)、move_group交互
【附带源码】机械臂MoveIt2极简教程(三)、URDF/SRDF介绍
【附带源码】机械臂MoveIt2极简教程(四)、第一个入门demo
【附带源码】机械臂MoveIt2极简教程(五)、第二个demo - rviz可视化
【附带源码】机械臂MoveIt2极简教程(六)、第三个demo -机械臂的避障规划
目录
- 系列文章目录
- 1. 新建C++代码
- 2. 修改launch文件
- 3. 修改CMakeLists.txt
- 4. 运行
本节实现的效果就是让机械臂绕过侧面的障碍物。
moveit2机械臂绕障
1. 新建C++代码
#include <moveit/move_group_interface/move_group_interface.h>
#include <moveit/planning_scene_interface/planning_scene_interface.h>
#include <moveit_visual_tools/moveit_visual_tools.h>#include <memory>
#include <rclcpp/rclcpp.hpp>
#include <thread>int main(int argc, char *argv[])
{// Initialize ROS and create the Noderclcpp::init(argc, argv);auto const node = std::make_shared<rclcpp::Node>("planning_around_objects", rclcpp::NodeOptions().automatically_declare_parameters_from_overrides(true));// Create a ROS loggerauto const logger = rclcpp::get_logger("planning_around_objects");RCLCPP_INFO(logger, "========================> start");// We spin up a SingleThreadedExecutor for the current state monitor to get// information about the robot's state.rclcpp::executors::SingleThreadedExecutor executor;executor.add_node(node);auto spinner = std::thread([&executor](){ executor.spin(); });// Create the MoveIt MoveGroup Interfaceusing moveit::planning_interface::MoveGroupInterface;auto move_group_interface = MoveGroupInterface(node, "panda_arm");// Construct and initialize MoveItVisualToolsauto moveit_visual_tools =moveit_visual_tools::MoveItVisualTools{node, "panda_link0", rviz_visual_tools::RVIZ_MARKER_TOPIC,move_group_interface.getRobotModel()};moveit_vis相关文章:
、第三个demo -机械臂的避障规划)
【附带源码】机械臂MoveIt2极简教程(六)、第三个demo -机械臂的避障规划
系列文章目录 【附带源码】机械臂MoveIt2极简教程(一)、moveit2安装 【附带源码】机械臂MoveIt2极简教程(二)、move_group交互 【附带源码】机械臂MoveIt2极简教程(三)、URDF/SRDF介绍 【附带源码】机械臂MoveIt2极简教程(四)、第一个入门demo 【附带源码】机械臂Move…...

innovus:route secondary pg pin
我正在「拾陆楼」和朋友们讨论有趣的话题,你⼀起来吧? 拾陆楼知识星球入口 innovus route secondary pg pin分以下几步: #设置pg net连接 globalNetConnect VDD_AON -type pgpin -pin VNW #设置ndr rule,具体绕线层次跟signal绕…...

btstack协议栈实战篇--LE Peripheral - Test Pairing Methods
btstack协议栈---总目录_bt stack是什么-CSDN博客 目录 1.Main Application Setup 2.Packet Handler 3.btstack_main 4.log信息 首先先理解一下,ble中的central,Peripheral,master和slave的理解? 以下是对这些概念的理解: “Central”(中心设备):与“Maste…...
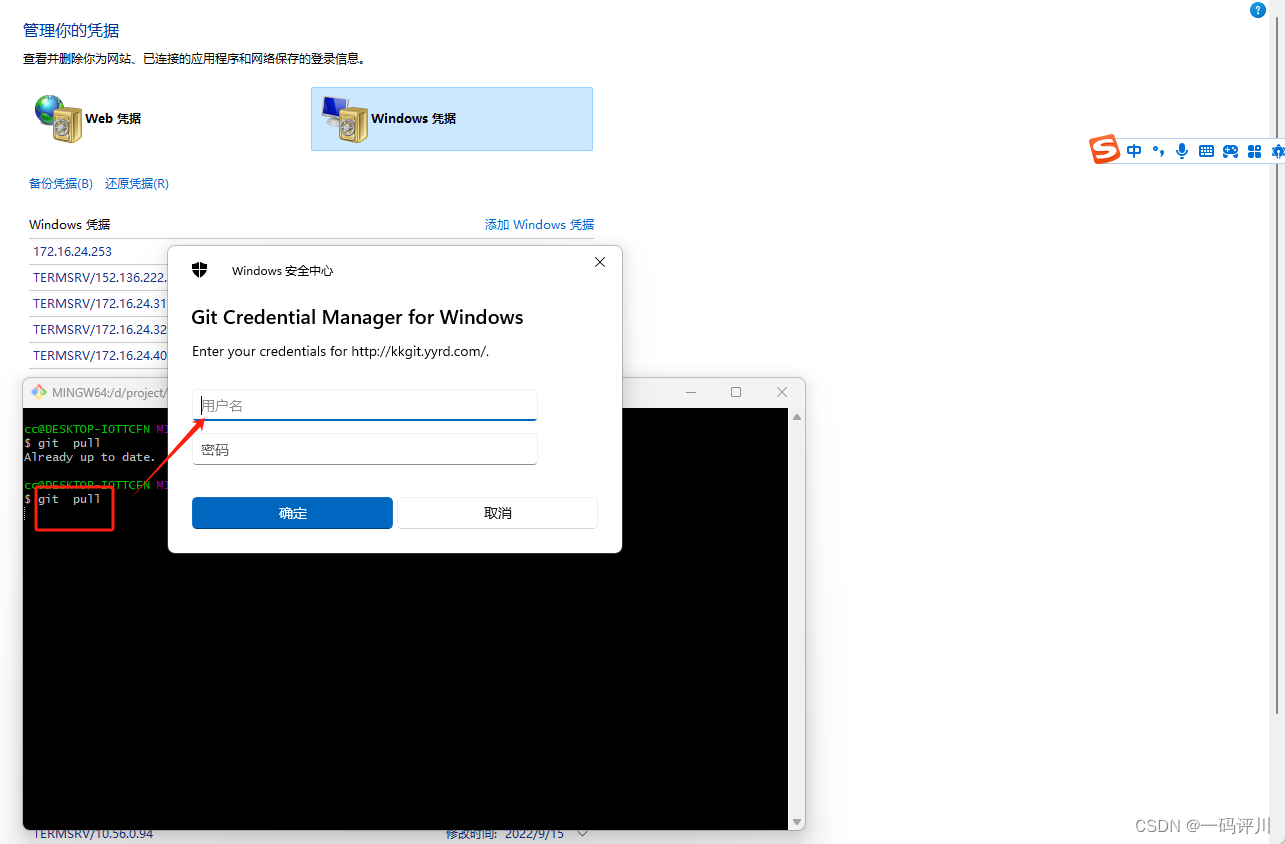
git下载项目登录账号或密码填写错误不弹出登录框
错误描述 登录账号或密码填写错误不弹出登录框 二、解决办法 控制面板\用户帐户\凭据管理器 找到对应的登录地址进行更新或者删除 再次拉取或者更新就会提示输入登录信息...

平移矩阵中的数学思考
《webgl编程指南》中,“平移矩阵”中相关值的得出 是基于“矩阵和向量相乘所得的等式”与“向量表达式”组成一个方程组 xaxbyczd xxTx 书中说,根据上面的方程组,可以很容易得出 a1、b0、c0、dTx 0、问题来了! 我也确实可以看…...
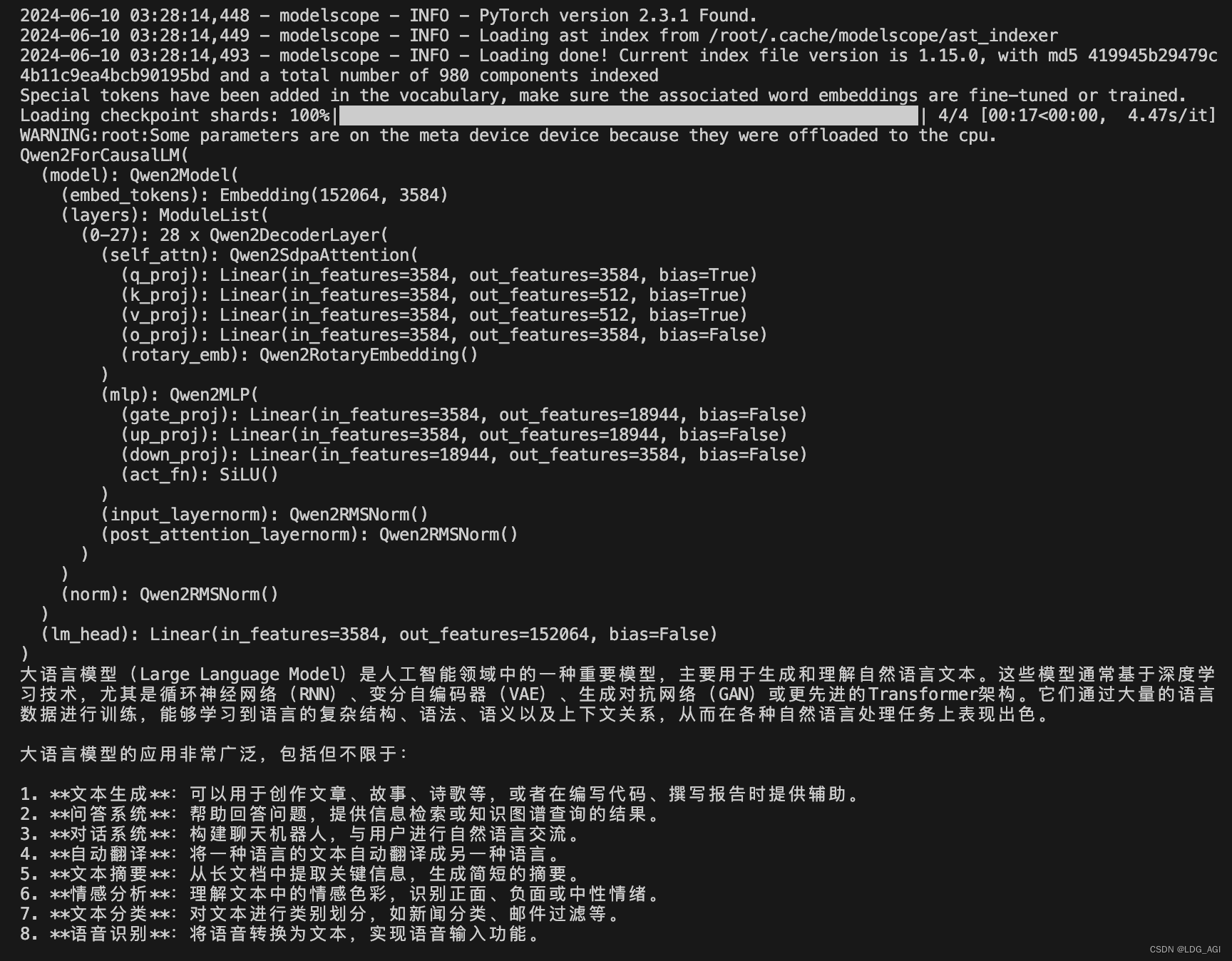
【机器学习】Qwen2大模型原理、训练及推理部署实战
目录 一、引言 二、模型简介 2.1 Qwen2 模型概述 2.2 Qwen2 模型架构 三、训练与推理 3.1 Qwen2 模型训练 3.2 Qwen2 模型推理 四、总结 一、引言 刚刚写完【机器学习】Qwen1.5-14B-Chat大模型训练与推理实战 ,阿里Qwen就推出了Qwen2&#x…...
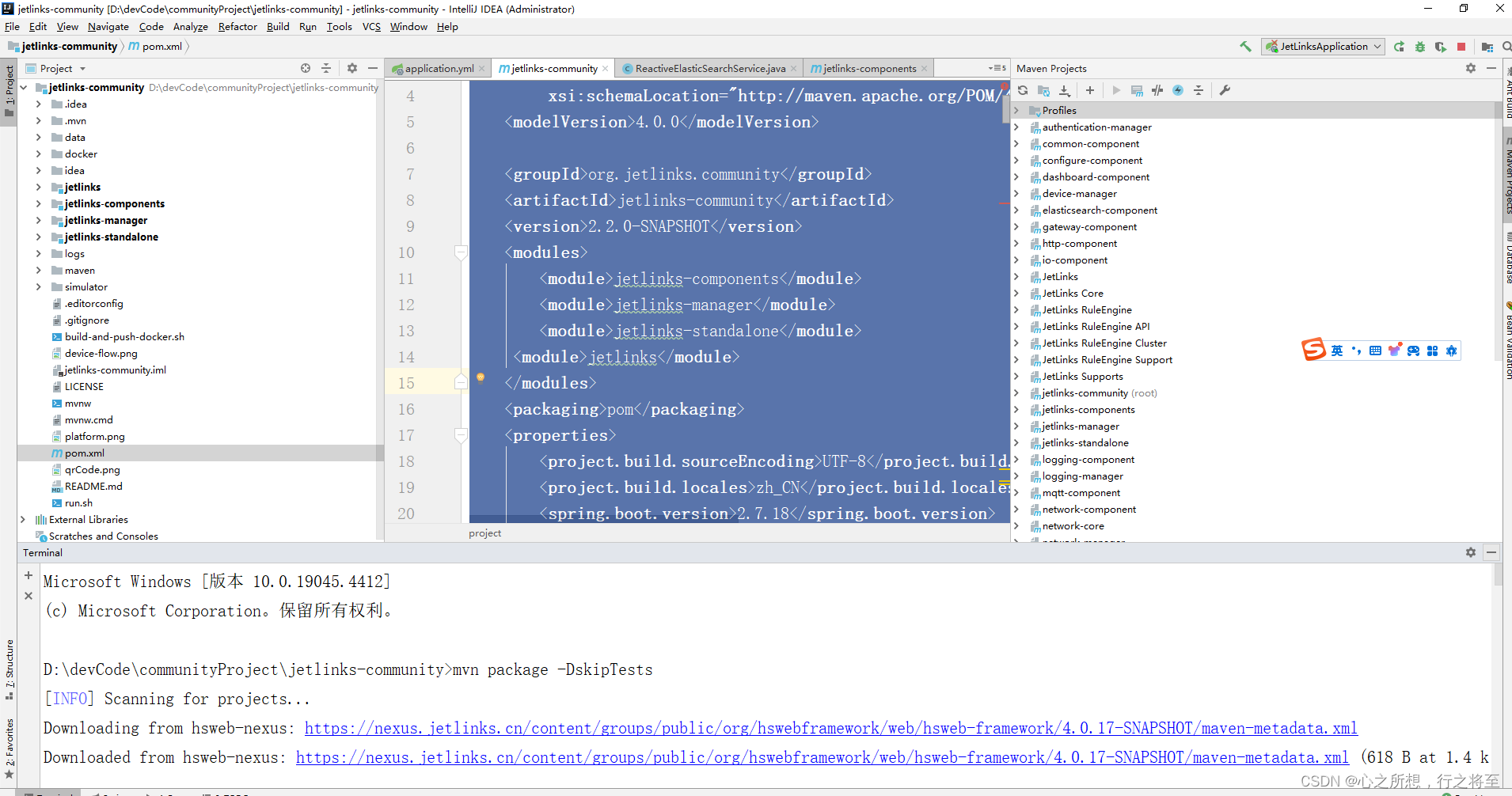
JetLinks开源物联网平台社区版部署教程
1.上github搜素jetlinks 2.找到源代码,并且下载到本地。 3.项目下载完成之后,还需要另外下载三个核心依赖模块。在github找到jetlinks。 4.点击进去下载,下载完成之后,你会发现里面有三个文件夹是空白的,先不用理会&am…...
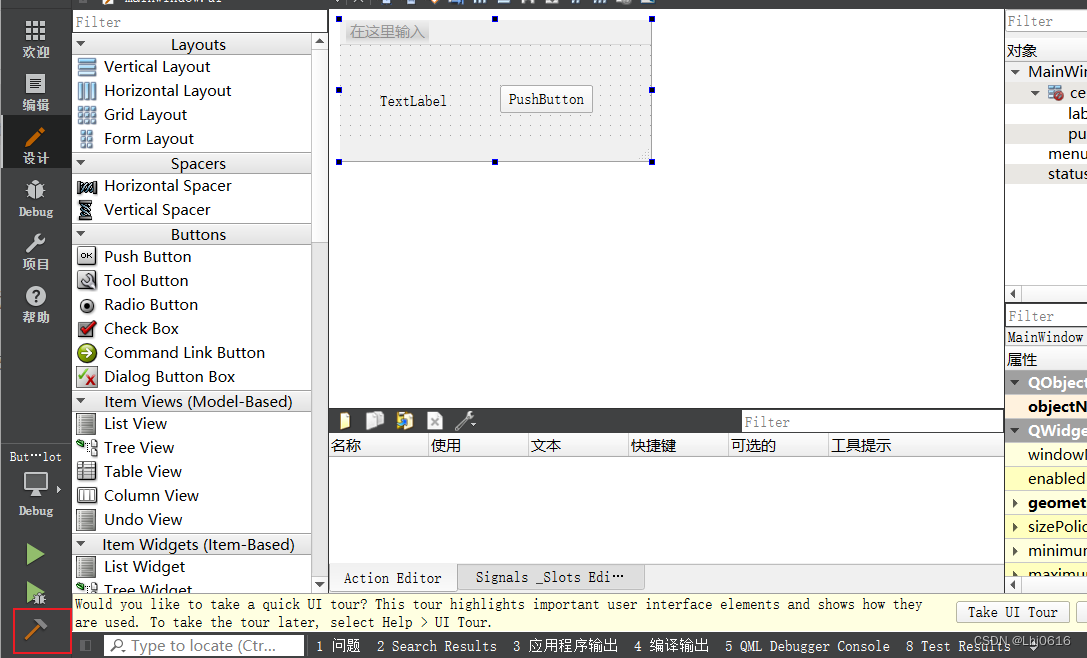
QT学习过程中遇到的问题自记
文章目录 前言问题1问题2问题3 前言 学习QT嵌入式实战开发(从串口通信到JSON通信微课视频版)的过程中遇到的几个小问题 问题1 1.将书中的示例代码导入自己的电脑,然后点击工程进去,不能运行,报错 no kits are enabled for this project… 我…...

自学网络安全的三个必经阶段(含路线图)
一、为什么选择网络安全? 这几年随着我国《国家网络空间安全战略》《网络安全法》《网络安全等级保护2.0》等一系列政策/法规/标准的持续落地,网络安全行业地位、薪资随之水涨船高。 未来3-5年,是安全行业的黄金发展期,提前踏入…...

gitlab下载及安装
目录 1、gitlab下载 2、gitlab安装 3、完全卸载GitLab 1、gitlab下载 首页:https://about.gitlab.com 安装:https://about.gitlab.com/install rpm包:https://packages.gitlab.com/gitlab/gitlab-ce 2、gitlab安装 2.1 CentOS 7 rpm -iv…...

YOLOv10改进|采用ADown降采样模块有效融合
📚 专栏地址:《YOLOv10算法改进实战》 👉 独家改进,对现有YOLOv10进行二次创新,提升检测精度,适合科研创新度十足,强烈推荐 🌟 统一使用 YOLOv10 代码框架,结合不同模块来构建不同的YOLO目标检测模型。 💥 本博客包含大量的改进方式,降低改进难度,改进点包含【B…...

libGL.so.1: cannot open shared object file: No such file or directory
Ubuntu 安装 PaddleOCR 时报错 libGL.so.1: cannot open shared object file: No such file or directory解决办法: # 这个好像GPU 服务器更好用 pip install opencv-python-headless如果不行就: # 尝试安装缺失的libGL.so.1文件。在大多数Linux发行版…...

2024年消防设施操作员考试题库及答案
一、单选题 31.工作时间是指劳动者根据国家的法律规定,在1个昼夜或1周之内从事本职工作的时间。《劳动法》规定劳动者每日工作时间不超过8h,平均每周工作时间不超过()h。 A.44 B.45 C.46 D.50 答案:A 解析&…...

30字以内免费翻译维吾尔语,汉维翻译工具推荐,维吾尔文字母OCR识别神器《维汉翻译通》App!
维吾尔文OCR文字识别 《维汉翻译通》App内置的OCR技术,能够快速识别图片中的文字和字母,无论是路标、菜单还是书籍,都能迅速转换为用户所需的语言,让语言障碍不再是问题。针对维吾尔语更是进行了专门的优化,即便是手写…...

省市县选择三级联动(使用高德API实现)
省市县选择如果自己实现是比较麻烦的,最近发现可以使用高德实现省市县联动选择,实现后来记录一下供大家参考。 文章目录 最终效果:一、准备工作二、完整页面代码 最终效果: 实现单次点击获取省市县名称,选择完成后返回…...
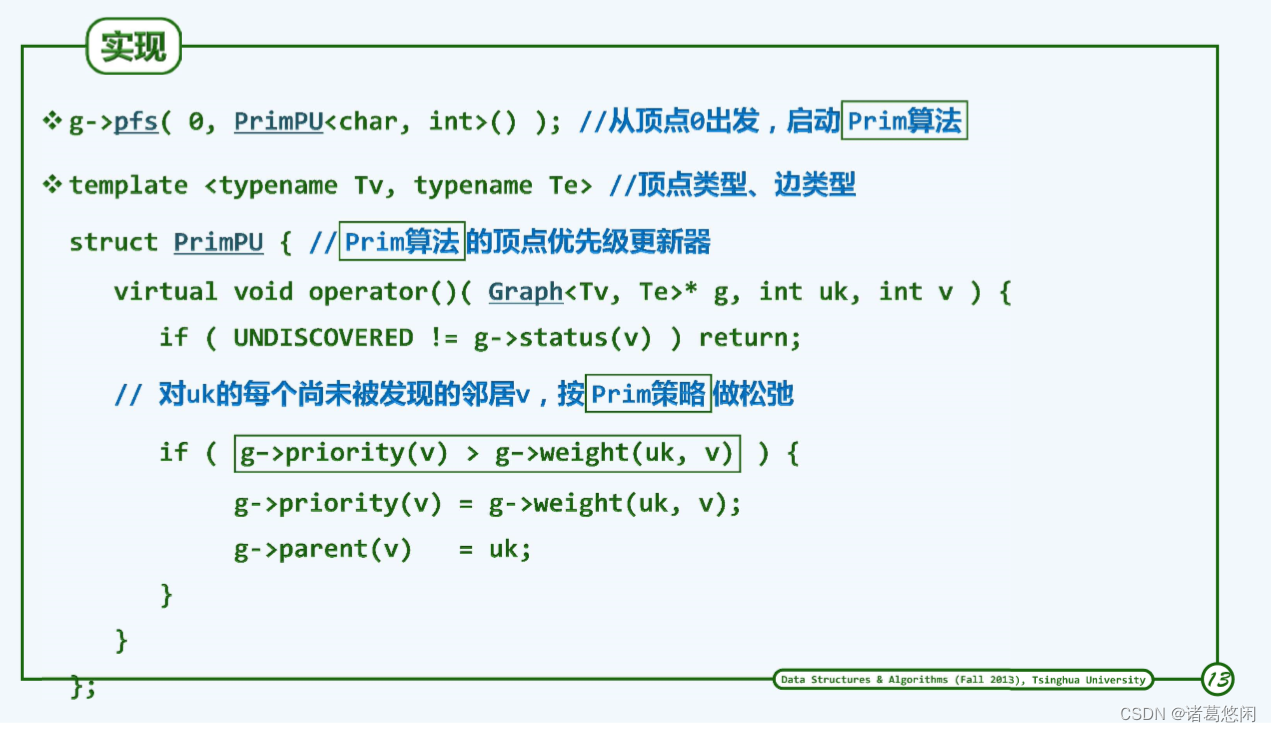
【数据结构(邓俊辉)学习笔记】图06——最小支撑树
文章目录 0. 概述1. 支撑树2. 最小支撑树3. 歧义性4. 蛮力算法5. Prim算法5.1 割与极短跨越边5.2 贪心迭代5.3 实例5.4 实现5.5 复杂度 0. 概述 学习下最小支撑树和prim算法。 1. 支撑树 最小的连通图是树。 连通图G的某一无环连通子图T若覆盖G中所有的顶点,则称…...

海豚调度清理:使用 API 轻松清理历史工作流实例以及日志文件
💡 本系列文章是 DolphinScheduler 由浅入深的教程,涵盖搭建、二开迭代、核心原理解读、运维和管理等一系列内容。适用于想对 DolphinScheduler了解或想要加深理解的读者。 祝开卷有益。 大数据学习指南 大家好,我是小陶,DolphinS…...

python怎么显示行号
我们如果想让Python IDLE显示行号,我们可以通过扩展IDLE功能来做到。 1.我们需要下载一个LineNumber.py扩展。 2.我们打开Python安装目录,找到安装目录下的Lib\idlelib目录,复制LineNumber到这个目录。 3.然后启动扩展。 4.配置扩展的方式…...

pytorch中,load_state_dict和torch.load的区别?
在 PyTorch 中,load_state_dict 和 torch.load 是两个不同的函数,用于不同的目的。 torch.load: 用途: 从磁盘加载一个保存的对象。这个对象可以是一个模型的整个状态字典(包含模型参数)、优化器状态字典、甚至是任意其他 Python …...
)
ObjectARX打印当前图纸为PDF,无延迟(亲测有效)
CAD二次开发定制ObjectARX安装配置AutoCAD插件ZWCAD插件C++ //----------------------------------------------------------------------------- //----- acrxEntryPoint.cpp //----------------------------------------------------------------------------- #include &quo…...

Eclipse框架:插件化架构与开发工具深度解析
1. Eclipse框架的起源与演进Eclipse最初由IBM及其子公司Object Technology International(OTI)在1999年启动开发,初衷是为WebSphere产品线提供更好的应用开发支持。这个完全用Java编写的平台,最初投入了40名开发人员和超过4000万美…...

革新Mac软件管理体验:Applite智能图形化工具深度解析
革新Mac软件管理体验:Applite智能图形化工具深度解析 【免费下载链接】Applite User-friendly GUI macOS application for Homebrew Casks 项目地址: https://gitcode.com/gh_mirrors/ap/Applite 还在为繁琐的命令行安装而烦恼?是否曾因复杂的Hom…...

3D设计工作流救星:STL转STEP一键转换,让CAD协作不再卡顿 [特殊字符]
3D设计工作流救星:STL转STEP一键转换,让CAD协作不再卡顿 😊 【免费下载链接】stltostp Convert stl files to STEP brep files 项目地址: https://gitcode.com/gh_mirrors/st/stltostp 您是否遇到过这样的困境?精心设计的3…...

Python代码格式化终极指南:使用YAPF从混乱到优雅的蜕变案例 [特殊字符]
Python代码格式化终极指南:使用YAPF从混乱到优雅的蜕变案例 🚀 【免费下载链接】yapf A formatter for Python files 项目地址: https://gitcode.com/gh_mirrors/ya/yapf YAPF(Yet Another Python Formatter)是一款强大的P…...

基于Node.js与whatsapp-web.js构建WhatsApp AI聊天机器人全流程解析
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫harshitethic/whatsapp-chatgpt。光看名字,很多朋友可能就猜到了,这是一个把ChatGPT的能力集成到WhatsApp里的工具。简单来说,就是让你能在WhatsApp里直接和AI对话&…...

客户受电工程图纸审核|全网独家复现,多模态+知识图谱创新改进篇 引入MM-KG融合架构,多模态感知+知识关联助力图纸全检、隐患精准定位、审核效率翻倍
目录 一、行业痛点:人工抽检模式的致命瓶颈(附真实场景痛点) 1.1 审核效率极低,无法适配规模化需求 1.2 漏判误判率高,审核质量依赖个人经验 1.3 审核标准不统一,追溯难度大 1.4 人力成本高昂,专业人才缺口大 二、创新突破:多模态+知识图谱融合架构(核心改进解析…...

Onyx:基于Next.js 14的全栈MVP模板,集成Supabase与现代化工具链
1. 项目概述:Onyx,一个开箱即用的全栈Next.js 14 MVP模板如果你正在寻找一个能让你在几天内,而不是几周内,就启动一个现代化、功能齐全的Web应用原型的起点,那么Onyx很可能就是你需要的那个“瑞士军刀”。这不是一个简…...

如何用拯救者工具箱完全掌控联想笔记本:开源硬件管理终极指南
如何用拯救者工具箱完全掌控联想笔记本:开源硬件管理终极指南 【免费下载链接】LenovoLegionToolkit Lightweight Lenovo Vantage and Hotkeys replacement for Lenovo Legion laptops. 项目地址: https://gitcode.com/gh_mirrors/le/LenovoLegionToolkit 你…...

Power Automate调用Azure Foundry智能体
Power Automate调用Azure Foundry智能体一、创建Foundry智能体二、发送HTTP请求,调用Foundry智能体三、拓展一、创建Foundry智能体 先从创建开始吧 填好,然后直接审阅并创建就行了。一个资源下可以创建多个项目 转到资源 转到门户 这里有API密钥&…...

智慧工地起重机吊钩检测数据集VOC+YOLO格式1138张1类别
数据集格式:Pascal VOC格式YOLO格式(不包含分割路径的txt文件,仅仅包含jpg图片以及对应的VOC格式xml文件和yolo格式txt文件)图片数量(jpg文件个数):1138标注数量(xml文件个数):1138标注数量(txt文件个数):1138标注类别…...