ROS1学习笔记:tf坐标系广播与监听的编程实现(ubuntu20.04)
参考B站古月居ROS入门21讲:tf坐标系广播与监听的编程实现
基于VMware Ubuntu 20.04 Noetic版本的环境
文章目录
- 一、创建功能包
- 二、创建代码
- 2.1 以C++为例
- 2.1.1 配置代码编译规则
- 2.1.2 编译整个工作空间
- 2.1.2 配置环境变量
- 2.1.4 执行代码
- 2.2 以Python为例
- 2.2.1 配置代码编译规则
- 2.2.2 编译整个工作空间
- 2.2.3 配置环境变量
- 2.2.4 执行代码
一、创建功能包
我们在src目录下创建learning_tf功能包:
cd ~/catkin_ws/src
catkin_create_pkg learning_tf roscpp rospy tf turtlesim
二、创建代码
如何实现一个TF广播器?
- 定义TF广播器(TransformBroadcaster)
- 创建坐标变换值
- 发布坐标变换(sendTransform)
如何实现一个TF监听器?
- 定义TF监听器(TransformListener)
- 查找坐标变换(waitForTransform、lookupTransform)
2.1 以C++为例
turtle_tf_broadcaster.cpp和turtle_tf_listener.cpp拷贝进src目录下,
turtle_tf_broadcaster.cpp代码为:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************//*** 该例程产生tf数据,并计算、发布turtle2的速度指令*/#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <turtlesim/Pose.h>std::string turtle_name;void poseCallback(const turtlesim::PoseConstPtr& msg)
{// 创建tf的广播器static tf::TransformBroadcaster br;// 初始化tf数据tf::Transform transform;transform.setOrigin( tf::Vector3(msg->x, msg->y, 0.0) );tf::Quaternion q;q.setRPY(0, 0, msg->theta);transform.setRotation(q);// 广播world与海龟坐标系之间的tf数据br.sendTransform(tf::StampedTransform(transform, ros::Time::now(), "world", turtle_name));
}int main(int argc, char** argv)
{// 初始化ROS节点ros::init(argc, argv, "my_tf_broadcaster");// 输入参数作为海龟的名字if (argc != 2){ROS_ERROR("need turtle name as argument"); return -1;}turtle_name = argv[1];// 订阅海龟的位姿话题ros::NodeHandle node;ros::Subscriber sub = node.subscribe(turtle_name+"/pose", 10, &poseCallback);// 循环等待回调函数ros::spin();return 0;
};
turtle_tf_listener.cpp代码为:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************//*** 该例程监听tf数据,并计算、发布turtle2的速度指令*/#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>int main(int argc, char** argv)
{// 初始化ROS节点ros::init(argc, argv, "my_tf_listener");// 创建节点句柄ros::NodeHandle node;// 请求产生turtle2ros::service::waitForService("/spawn");ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");turtlesim::Spawn srv;add_turtle.call(srv);// 创建发布turtle2速度控制指令的发布者ros::Publisher turtle_vel = node.advertise<geometry_msgs::Twist>("/turtle2/cmd_vel", 10);// 创建tf的监听器tf::TransformListener listener;ros::Rate rate(10.0);while (node.ok()){// 获取turtle1与turtle2坐标系之间的tf数据tf::StampedTransform transform;try{listener.waitForTransform("/turtle2", "/turtle1", ros::Time(0), ros::Duration(3.0));listener.lookupTransform("/turtle2", "/turtle1", ros::Time(0), transform);}catch (tf::TransformException &ex) {ROS_ERROR("%s",ex.what());ros::Duration(1.0).sleep();continue;}// 根据turtle1与turtle2坐标系之间的位置关系,发布turtle2的速度控制指令geometry_msgs::Twist vel_msg;vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),transform.getOrigin().x());vel_msg.linear.x = 0.5 * sqrt(pow(transform.getOrigin().x(), 2) +pow(transform.getOrigin().y(), 2));turtle_vel.publish(vel_msg);rate.sleep();}return 0;
};
2.1.1 配置代码编译规则
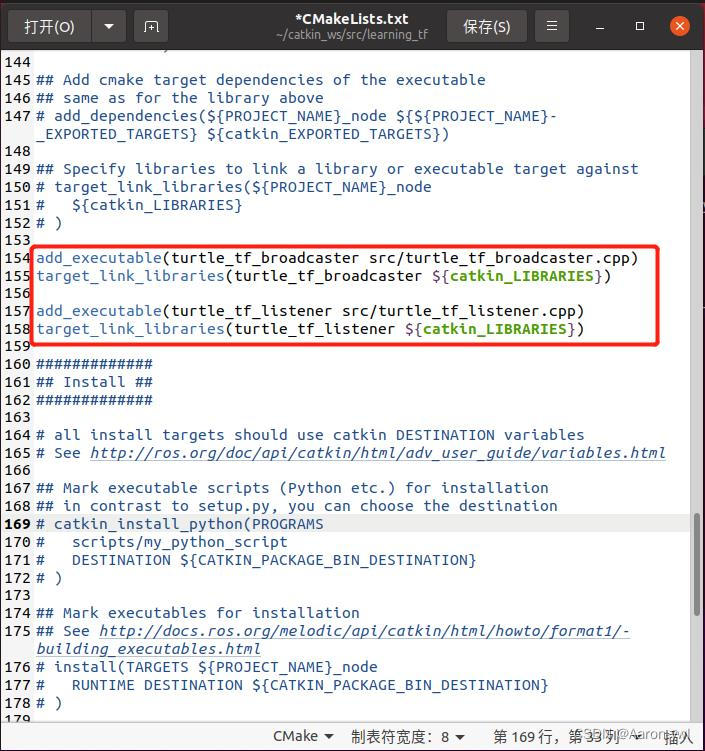
将以下代码拷贝CMakeLists.txt进指定位置:
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
2.1.2 编译整个工作空间
cd ~/catkin_ws
catkin_make
2.1.2 配置环境变量
之前已经配置过。
2.1.4 执行代码
roscore
rosrun turtlesim turtlesim_node
我们下面直接在命令行传入参数。
第1个参数:我们在turtle_tf_broadcaster.cpp定义节点时使用了"my_tf_broadcaster"的名字,我们使用__name:=传入新的名字取代"my_tf_broadcaster",这样避免名字重复(因为ROS中节点名字不能重复),这样就可以重复跑程序了。
第2个参数是turtle名称 turtle1 和 turtle2。
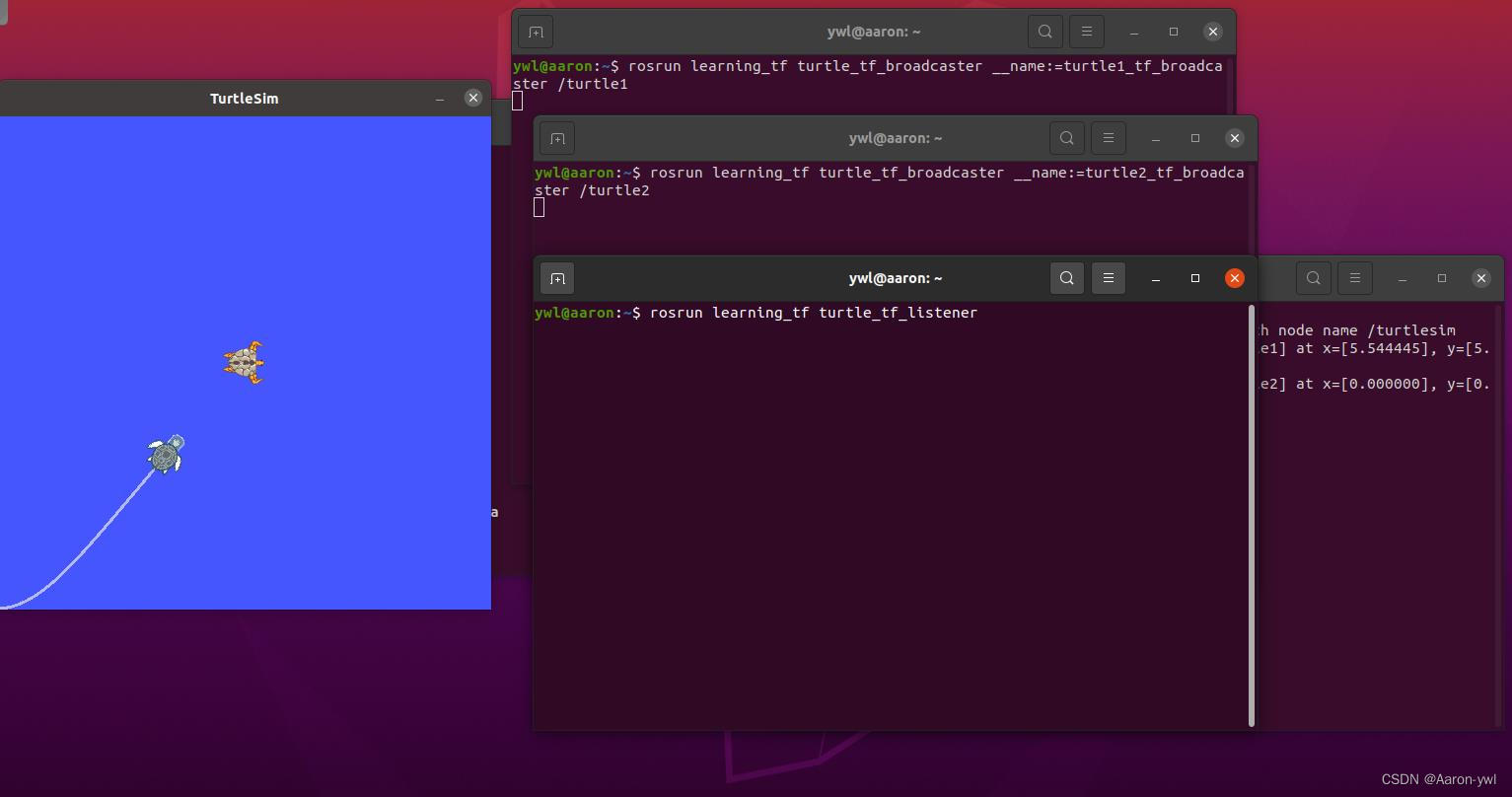
rosrun learning_tf turtle_tf_broadcaster __name:=turtle1_tf_broadcaster /turtle1
rosrun learning_tf turtle_tf_broadcaster __name:=turtle2_tf_broadcaster /turtle2
rosrun learning_tf turtle_tf_listener
执行完后就会有一只小海龟生成并跑向中间的第1只小海龟。
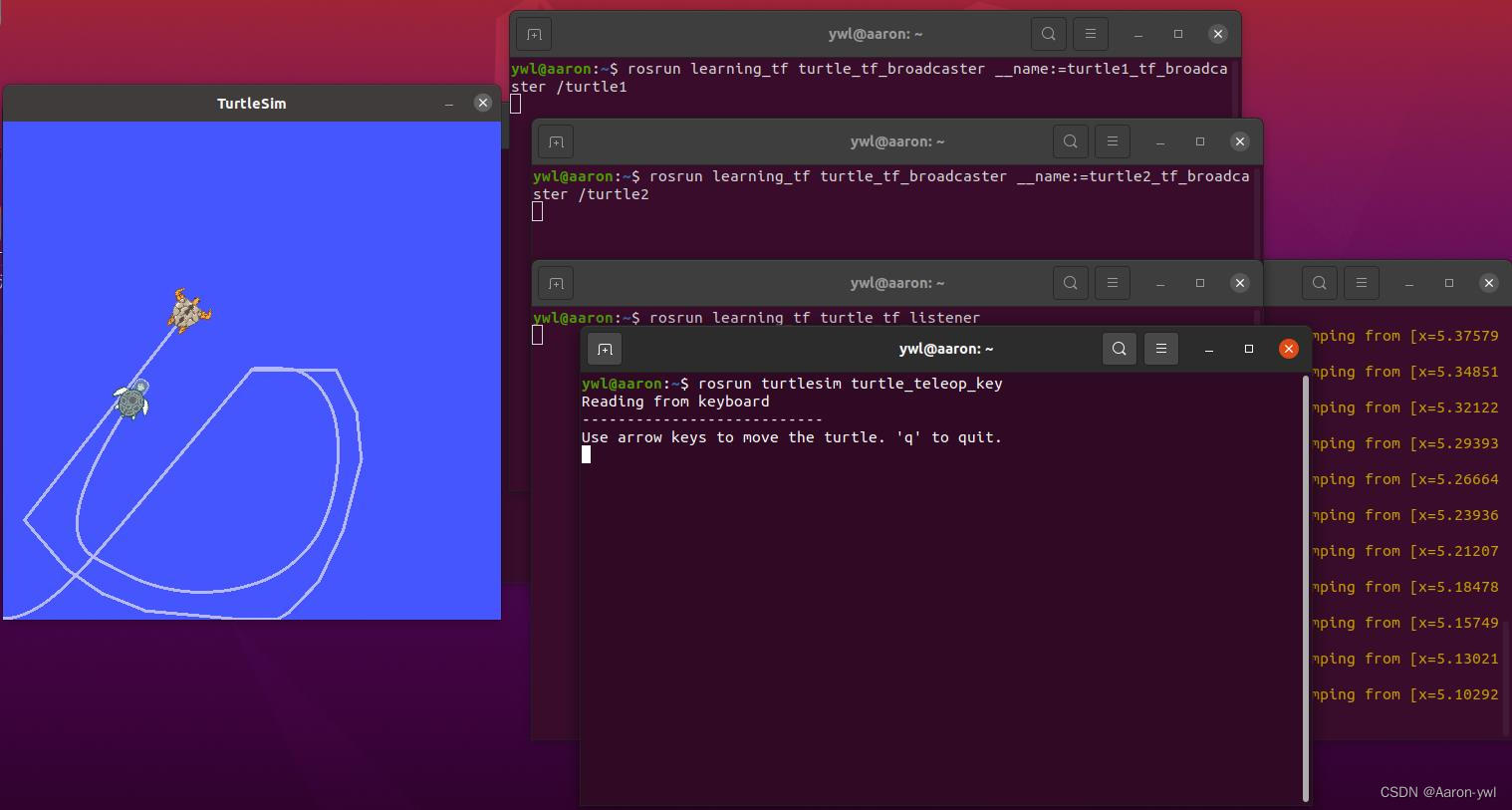
我们可以用键盘控制小海龟,同样可以让第2只小海龟追着我们跑。
2.2 以Python为例
将turtle_tf_broadcaster.py和turtle_tf_listener.py拷贝进scripts文件夹下(打开执行权限)。
turtle_tf_broadcaster.py代码为:
#!/usr/bin/env python
# -*- coding: utf-8 -*-########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
######################################################################### 该例程将请求/show_person服务,服务数据类型learning_service::Personimport roslib
roslib.load_manifest('learning_tf')
import rospyimport tf
import turtlesim.msgdef handle_turtle_pose(msg, turtlename):br = tf.TransformBroadcaster()br.sendTransform((msg.x, msg.y, 0),tf.transformations.quaternion_from_euler(0, 0, msg.theta),rospy.Time.now(),turtlename,"world")if __name__ == '__main__':rospy.init_node('turtle_tf_broadcaster')turtlename = rospy.get_param('~turtle')rospy.Subscriber('/%s/pose' % turtlename,turtlesim.msg.Pose,handle_turtle_pose,turtlename)rospy.spin()
turtle_tf_listener.py代码为:
#!/usr/bin/env python
# -*- coding: utf-8 -*-########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
######################################################################### 该例程将请求/show_person服务,服务数据类型learning_service::Personimport roslib
roslib.load_manifest('learning_tf')
import rospy
import math
import tf
import geometry_msgs.msg
import turtlesim.srvif __name__ == '__main__':rospy.init_node('turtle_tf_listener')listener = tf.TransformListener()rospy.wait_for_service('spawn')spawner = rospy.ServiceProxy('spawn', turtlesim.srv.Spawn)spawner(4, 2, 0, 'turtle2')turtle_vel = rospy.Publisher('turtle2/cmd_vel', geometry_msgs.msg.Twist,queue_size=1)rate = rospy.Rate(10.0)while not rospy.is_shutdown():try:(trans,rot) = listener.lookupTransform('/turtle2', '/turtle1', rospy.Time(0))except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):continueangular = 4 * math.atan2(trans[1], trans[0])linear = 0.5 * math.sqrt(trans[0] ** 2 + trans[1] ** 2)cmd = geometry_msgs.msg.Twist()cmd.linear.x = linearcmd.angular.z = angularturtle_vel.publish(cmd)rate.sleep()
2.2.1 配置代码编译规则
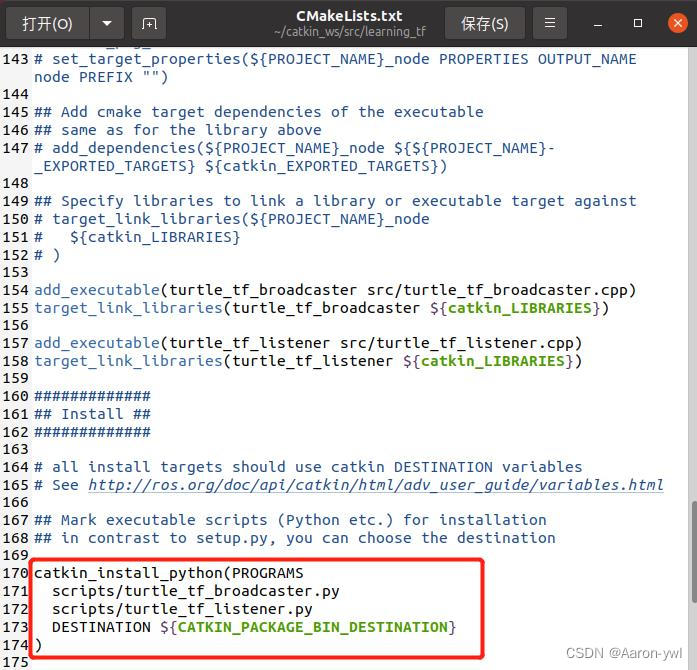
打开CMakeLists.txt,配置编译规则
2.2.2 编译整个工作空间
cd ~/catkin_ws
catkin_make
2.2.3 配置环境变量
之前已经配置过。
2.2.4 执行代码
roscore
rosrun turtlesim turtlesim_node
rosrun learning_tf turtle_tf_broadcaster.py __name:=turtle1_tf_broadcaster _turtle:=turtle1
rosrun learning_tf turtle_tf_broadcaster.py __name:=turtle2_tf_broadcaster _turtle:=turtle2
rosrun learning_tf turtle_tf_listener.py
rosrun turtlesim turtle_teleop_key

相关文章:
ROS1学习笔记:tf坐标系广播与监听的编程实现(ubuntu20.04)
参考B站古月居ROS入门21讲:tf坐标系广播与监听的编程实现 基于VMware Ubuntu 20.04 Noetic版本的环境 文章目录一、创建功能包二、创建代码2.1 以C为例2.1.1 配置代码编译规则2.1.2 编译整个工作空间2.1.2 配置环境变量2.1.4 执行代码2.2 以Python为例2.2.1 配置代码…...

力扣解法汇总1590. 使数组和能被 P 整除
目录链接: 力扣编程题-解法汇总_分享记录-CSDN博客 GitHub同步刷题项目: https://github.com/September26/java-algorithms 原题链接:力扣 描述: 给你一个正整数数组 nums,请你移除 最短 子数组(可以为 …...
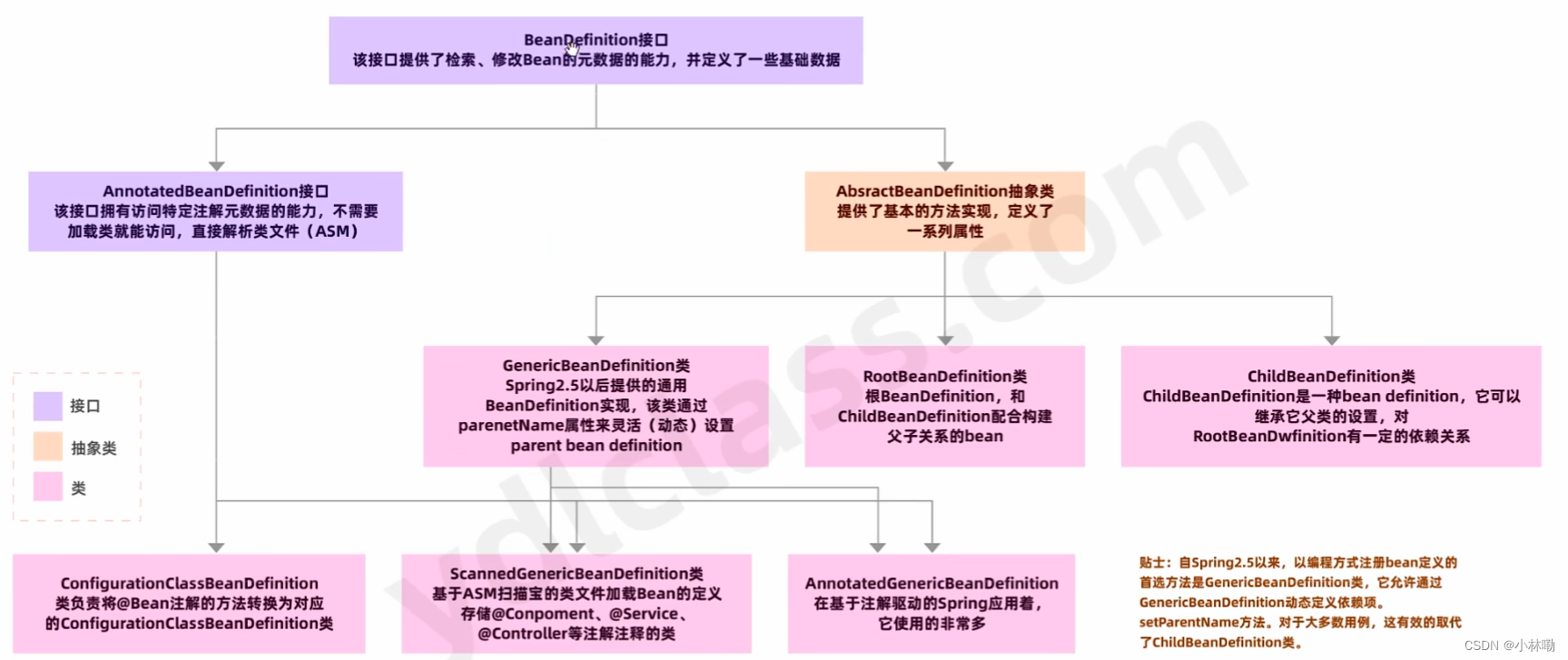
Spring源码阅读(基础)
第一章:bean的元数据 1.bean的注入方式: 1.1 xml文件 1.2 注解 Component(自己写的类才能在上面加这些注解) 1.3配置类: Configuration 注入第三方数据源之类 1.4 import注解 (引用了Myselector类下…...

服务搭建篇(九) 使用GitLab+Jenkins搭建CI\CD执行环境 (上) 基础环境搭建
1.前言 每当我们程序员开发在本地完成开发之后 , 都要部署到正式环境去使用 , 在一些传统的运维体系中 , 开发与运维都是割裂的 , 开发人员不允许操作正式服务器 , 服务器只能通过运维团队来操作 , 这样可以极大的提高服务器的安全性 , 不经过安全保护的开放服务器 , 对于黑客…...

CDC 长沙站丨云原生技术研讨会:数字兴链,云化未来!
一、活动信息:活动主题:CDC 长沙站丨云原生技术研讨会活动时间:2023 年 3 月 14 日下午 14:30-17:30活动地点:长沙市岳麓区-拓维信息总部 1 楼多功能厅活动参与方式:免门票参与,戳此…...
)
A.特定领域知识图谱知识推理方案:知识图谱推理算法综述[二](DTransE/PairRE:基于表示学习的知识图谱链接预测算法)
推荐参考文章: A.特定领域知识图谱知识推理方案:知识图谱推理算法综述[一](基于距离的翻译模型:TransE、TransH、TransR、TransH、TransA、RotatE) A.特定领域知识图谱知识推理方案:知识图谱推理算法综述[二](DTransE/PairRE:基于表示学习的知识图谱链接预测算法) A.…...
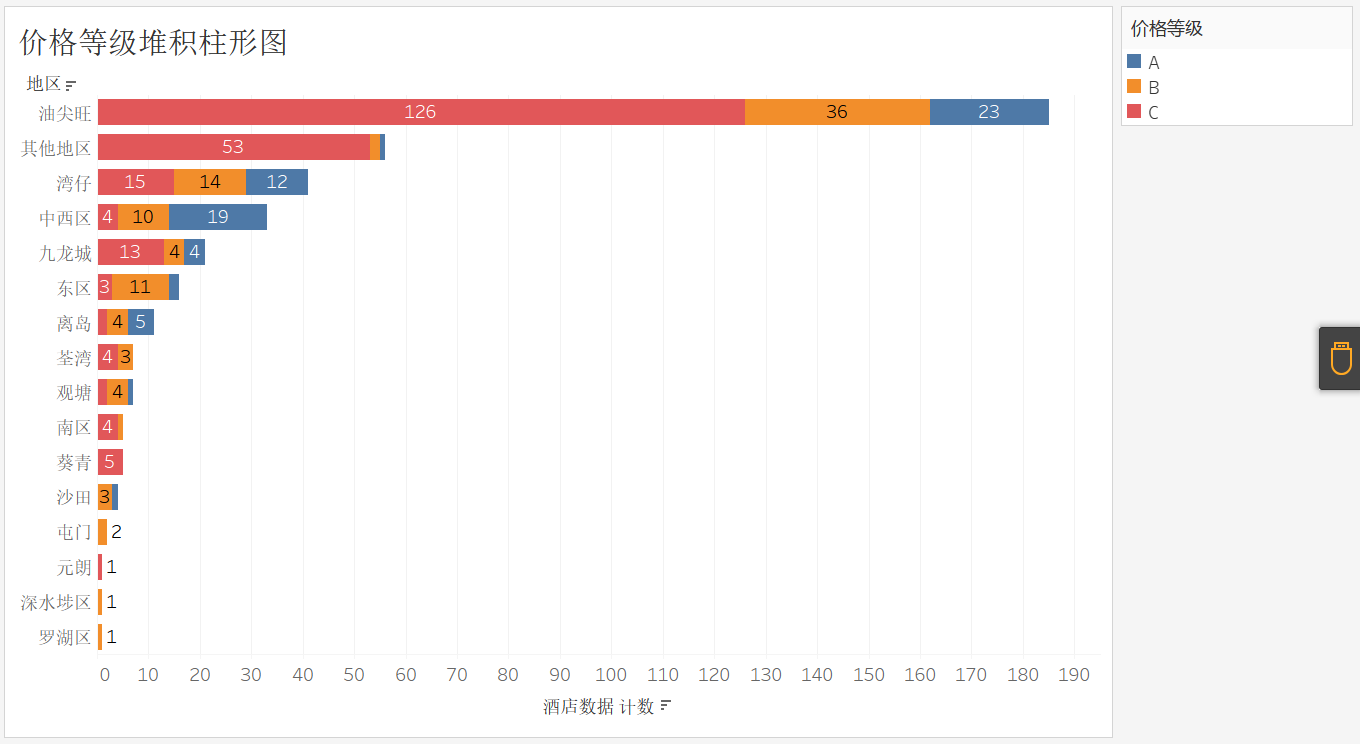
香港酒店模拟分析项目报告--使用tableau、python、matlab
转载请标记本文出处 软件:tableau、pycharm、关系型数据库:MySQL 数据大量分析考虑电脑性能的情况。 文章目录前言一、爬虫是什么?二、使用tableau数据可视化1.引入数据1.1 制作直方图-各地区酒店数量条形图1.2 各地区酒店均价1.3 价格等级堆…...

第18天-商城业务(商品检索服务,基于Elastic Search完成商品检索)
1.构建商品检索页面 1.1.引入依赖 <!-- thymeleaf模板引擎 --><dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-thymeleaf</artifactId></dependency><!-- 热更新 --><…...
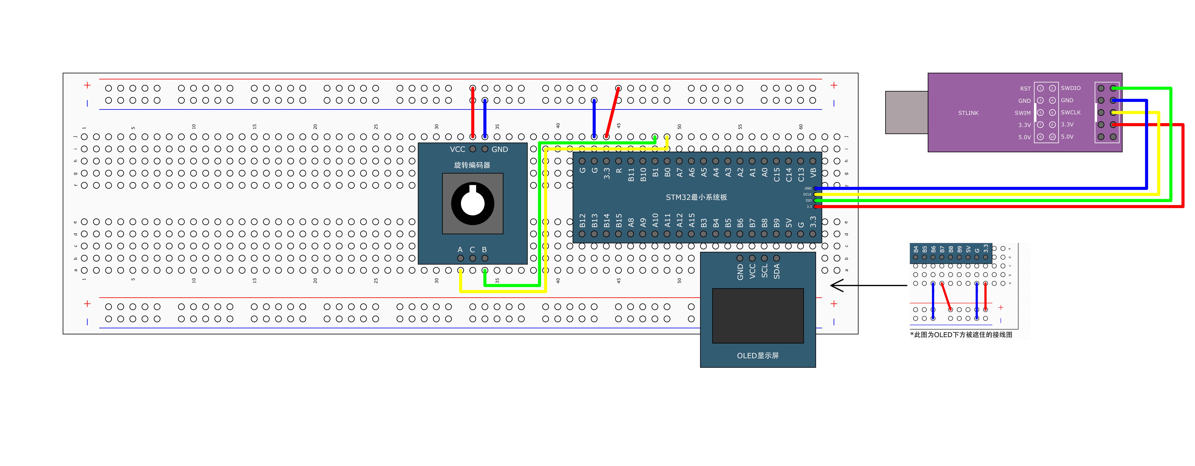
5.2 对射式红外传感器旋转编码器计次
对射式红外传感器1.1 接线图VCC GND分别接电源的正负极DO数字输出端,随意选择一个GPIO口1.2 硬件原理当挡光片或者编码盘在对射式红外传感器中间经过时,DO就会输出电平变化信号,电平跳变信号触发STM32 PB14号口中断,在中断函数中执…...

【数据库概论】第九章 关系查询处理和查询优化
第九章 关系查询处理和查询优化 本章主要介绍关系数据库查询管理和查询优化,主要分为代数优化(又称逻辑优化)和物理优化(也称非代数优化)。 9.1 关系型数据库系统的查询处理 查询处理是关系型数据库管理系统执行查询…...
 my cloud test bed (by quqi99))
(WIP) my cloud test bed (by quqi99)
作者:张华 发表于:2023-03-10 版权声明:可以任意转载,转载时请务必以超链接形式标明文章原始出处和作者信息及本版权声明 问题 想创建一个local local test bed, 用来方便做各种云实验,如openstack, k8s, ovn, lxd等…...

git | git 2023 详细版
文章目录一、Git命令1.2 设计用户签名1.3 初始化本地库1.4 查看本地库状态1.5 添加至暂存区1.6 从暂存区删除1.7 将暂存区的文件提交到本地库1.8 查看版本信息二、Git分支2.1 查看分支2.2 创建分支2.3 切换分支2.4 合并分支三、GitHub3.1 代码克隆clone3.2 给库取别名3.3 推送本…...

camunda流程引擎基本使用(笔记)
文章目录一、camunda基础1.1 安装与部署流程引擎1.2 流程引擎结构1.3 流程引擎的基本使用1.3.1 创建一个BPMN Diagram1.3.2 实现一个外部工作者1.3.3 部署流程1.3.4 创建一个流程实例并消费1.3.5 向流程中添加用户任务1.3.6 添加网关1.3.7 业务规则二、Java 集成流程引擎2.1 为…...

JS之数据结构与算法
前言数据结构是计算机存储、组织数据的方式,算法是系统描述解决问题的策略。了解基本的数据结构和算法可以提高代码的性能和质量。也是程序猿进阶的一个重要技能。手撸代码实现栈,队列,链表,字典,二叉树,动态规划和贪心算法1.数据结构篇1.1 栈栈的特点:先进后出clas…...
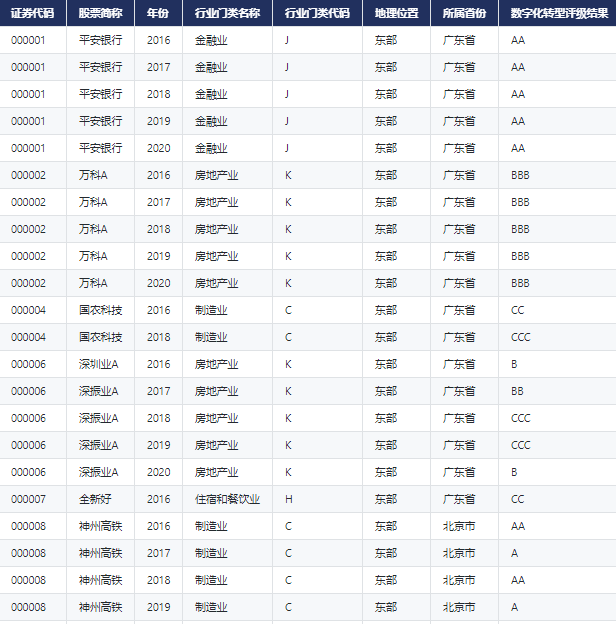
CnOpenData·A股上市企业数字化转型指数数据
一、数据简介 企业数字化转型是近年来中国社会各界重点关注的领域,但基础数据的不完善在很大程度上制约了相关科学研究的开展。构建合理、科学的数字化转型指标体系有利于学者定量地研究企业数字化的相关问题,也有利于衡量企业的数字化水平。广东金融学院…...

VMware16pro虚拟机安装全过程
很多时候需要用到Linux系统,简单的一种方式可以是:Windows系统运行Linux(Windows Subsystem for Linux)不过有些时候还是需要虚拟机来运行Linux,也更方便点,比如在做嵌入式系统的烧录等操作都需要Linux环境…...
)
阿里云第六代云服务器最新价格表(计算型c6、通用型g6和内存型r6)
目前阿里云第六代云服务器有计算型c6、通用型g6和内存型r6实例。计算型c6实例有2核4G、4核8G、8核16G配置可选,主要适用于网站应用、批量计算、视频编码等场景。通用型g6实例有2核8G、4核16G、8核32G配置可选,适用于各种类型的企业级应用,网站…...

微小目标识别研究(2)——基于K近邻的白酒杂质检测算法实现
文章目录实现思路配置opencv位置剪裁实现代码自适应中值滤波实现代码动态范围增强实现代码形态学处理实现代码图片预处理效果计算帧差连续帧帧差法原理和实现代码实现代码K近邻实现基本介绍实现代码这部分是手动实现的,并没有直接调用相关的库完整的代码——调用ope…...

2022-06-14至2022-08-11 关于复现MKP算法的总结与反思
Prerequisite 自2022年6月14日至2022年8月11日的时间内,我致力于完成A Hybrid Approach for the 0–1 Multidimensional Knapsack problem 论文的复现工作,此次是我第一次进行组合优化方向的学习工作,下面介绍该工作内容发展过程以及该工作结…...

IBMMQ教程二(window版安装)
下载下载地址:https://public.dhe.ibm.com/ibmdl/export/pub/software/websphere/messaging/mqadv/我这里选择的是9.1.0.0版本安装将下载完成的压缩包解压双击Setup.exe直接运行点击软件需求查看系统配置是否满足,右边绿色的对号说明满足需求,…...

一站式解决方案:3步实现Mac微信聊天记录的永久备份与专业管理
一站式解决方案:3步实现Mac微信聊天记录的永久备份与专业管理 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 在数字时代,微信聊天记录承载着珍贵…...

告别理论!在Spartan-6上玩转DDR3:从MIG IP核配置到UCF约束文件修改的完整避坑指南
Spartan-6 FPGA DDR3实战:从MIG配置到硬件调试的全链路解析 当你在ISE中点击"Generate"按钮完成MIG IP核配置时,真正的挑战才刚刚开始。这份指南将带你穿越从IP核生成到稳定运行的完整链路,特别聚焦那些官方文档语焉不详、网络教程…...

python算法毕设课题100例
文章目录🚩 1 前言1.1 选题注意事项1.1.1 难度怎么把控?1.1.2 题目名称怎么取?1.2 开题选题推荐1.2.1 起因1.2.2 核心- 如何避坑(重中之重)1.2.3 怎么办呢?🚩2 选题概览🚩 3 项目概览题目1 : 基于协同过滤的…...

微通道液冷散热:六类强化结构深度解析
🎓作者简介:科技自媒体优质创作者 🌐个人主页:莱歌数字-CSDN博客 💌公众号:莱歌数字(B站同名) 📱个人微信:yanshanYH 211、985硕士,从业16年 从…...

深度解密网易云音乐NCM格式:技术原理与实战应用指南
深度解密网易云音乐NCM格式:技术原理与实战应用指南 【免费下载链接】ncmdump ncmdump - 网易云音乐NCM转换 项目地址: https://gitcode.com/gh_mirrors/ncmdu/ncmdump 你是否曾在网易云音乐下载了心爱的歌曲,却发现只能在官方客户端播放…...

从Simulink模型到C代码:Assignment模块的‘Index Mode’选Zero还是One?一个影响深远的决定
从Simulink模型到C代码:索引模式选择的工程实践指南 在嵌入式软件开发中,模型与代码的协同设计一直是提高开发效率的关键环节。当Simulink模型工程师将算法模型转换为C代码时,一个看似简单的参数配置——Assignment模块的"Index Mode&q…...

菜单栏管理革命:Ice 如何用智能算法重塑 macOS 效率界面
菜单栏管理革命:Ice 如何用智能算法重塑 macOS 效率界面 【免费下载链接】Ice Powerful menu bar manager for macOS 项目地址: https://gitcode.com/GitHub_Trending/ice/Ice 当 macOS 菜单栏成为现代工作流的瓶颈时,Ice 以开源解决方案的身份出…...

如何为Unity游戏添加多语言支持:XUnity.AutoTranslator完整指南
如何为Unity游戏添加多语言支持:XUnity.AutoTranslator完整指南 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 你是否曾经因为语言障碍而无法享受心爱的Unity游戏?是否想要为你的…...

隐私优先的API密钥泄露检测工具:compromising-position设计与实战
1. 项目概述:一个帮你确认API密钥是否已泄露的隐私优先工具最近在开发者圈子里,一个叫OpenClaw的技能市场平台因为安全漏洞闹得沸沸扬扬,据说有几万个API密钥被泄露了。安全公告总是千篇一律地告诉你“请立即轮换你的密钥”,但说实…...

微信好友关系终极检测:WechatRealFriends帮你一键识别单向好友
微信好友关系终极检测:WechatRealFriends帮你一键识别单向好友 【免费下载链接】WechatRealFriends 微信好友关系一键检测,基于微信ipad协议,看看有没有朋友偷偷删掉或者拉黑你 项目地址: https://gitcode.com/gh_mirrors/we/WechatRealFri…...