论文阅读《Block-NeRF: Scalable Large Scene Neural View Synthesis》
论文地址:https://arxiv.org/pdf/2202.05263.pdf
复现源码:https://github.com/dvlab-research/BlockNeRFPytorch
概述
Block-NeRF是一种能够表示大规模环境的神经辐射场(Neural Radiance Fields)的变体,将 NeRF 扩展到渲染跨越多个街区的城市规模场景。该方法将场景分解为单独训练的 NeRF,使渲染时间与场景大小解耦,并允许对环境进行每个街区的更新。Block-NeRF为每个单独的 NeRF 添加外观嵌入(appearance embeddings)、学习姿态优化(learned pose refinement)和可控曝光(controllable exposure),并引入了一种在相邻 NeRF 之间对齐外观(aligning appearance)方法来融合不同场景信息。

模型架构

将场景分为多组Block-NeRF,每个Block可以并行独立训练,并在推理过程中进行融合。使得可以对单独的block更新而无需对整个场景进行重新训练。在此过程中,动态选择相关的 Block-NeRF 进行渲染,在跨越场景时以平滑的方式合成场景。为了实现这种平滑的合成方式,优化了Appearance代码来适应照明条件,并使用每个Block-NeRF到新视图的距离来计算插值权值。
Block 大小与位置
在每个十字路口放置一个Block-NeRF,覆盖十字路口本身与任意连接街道的75%的场景,使得任何两个相邻的街区之间有50%的场景重叠。
独立Block-NeRF的训练过程

外观编码:使用 MLP 来学习不同外观变化的条件,如不同的天气与光照条件。还可以通过控制外观编码(appearance embedding)来对不同环境进行线性插值,得到不同条件下的环境信息(如多云和晴朗的天空,或者白天与晚上),如图3与图4所示:

位姿优化:Learned Pose Refinement是通过在每个Block-NeRF中训练一个额外的神经网络来实现的,这个神经网络可以根据输入的图像和初始的相机姿态,输出一个修正后的相机姿态。使得Block-NeRF就可以利用更准确的相机姿态来生成更高质量的新视角图像。
输入图像曝光:将相机曝光信息输入到模型的外观预测部分,使得NeRF补偿视觉上的差异,使用 4 层的 sinsinsin 来对曝光信息进行编码。

瞬态(移动)物体:Transient Objects是指在训练图像中出现的临时物体,如行人、车辆等,它们会影响Block-NeRF学习场景的静态结构,因为它们会导致视角不一致。通过以下步骤来消除场景中的瞬态物体的影响:
- 首先,对于每个训练图像,使用一个分割算法来检测并去除Transient Objects,得到一个纯净的背景图像。
- 然后,对于每个Block-NeRF,使用去除了Transient Objects的背景图像来训练神经网络,从而学习场景的静态结构。
- 最后,在渲染新视角图像时,使用原始的训练图像(包含Transient Objects)作为输入,并将分割算法得到的掩码作为额外的输入送入Block-NeRF中,从而在输出图像中保留或去除Transient Objects。
这样做的好处是,Block-NeRF可以灵活地处理不同场景下的Transient Objects,并且可以在渲染时根据用户需求选择是否显示它们。
场景可见性预测:Visibility Prediction的具体实现是这样的: - 首先,对于每个Block-NeRF,构建一个小的多层感知机(MLP)fvf_vfv ,以位置信息 xxx 和方向信息 ddd 作为输入,用来学习样本点可见性的近似值。
- 然后,对于每个Block-NeRF,使用其训练图像中的采样点作为输入,计算其可见性近似值,并将其与由密度函数得到的透射率TiT_iTi作为监督信号进行训练。
- 最后,在合并多个Block-NeRF时,使用 fvf_vfv 来判断一个给定的场景区域是否对该Block-NeRF可见,并根据可见性近似值来加权不同Block-NeRF的输出颜色。
Visibility Prediction可以有效地解决不同Block-NeRF之间的遮挡问题,并且可以提高渲染质量和效率。
Block_Nerf合并
Block-NeRF选择:一个大型场景由多个 Block 组成,Block-NeRF使用两种策略进行Block选择(1)只考虑在目标视点设定半径范围内的Block-NeRF。(2)计算每个候选Block的相关可见性,如果平均可见性小于阈值,则舍弃该Block。如图2所示,可见性可以由一个独立的模块计算,且不需要在目标图像的分辨率下进行渲染。通过筛选,通常剩余1-3个Block-NeRF有待合并。
Block-NeRF合成:使用相机原点 ccc 与每个Block-NeRF 的中心 xix_ixi 之间的逆距离加权系数对候选 Block 插值(wi∝distance(c,xi)−pw_i\propto distance(c, x_i)^{-p}wi∝distance(c,xi)−p, ppp 影响Block之间的混合速率)。插值在二维图像中进行,在不同Block-NeRF之间产生平滑的过渡。
场景外观匹配:

Appearance Matching是为了在不同block之间消除外观上的不一致性,使得渲染结果更加自然和真实。具体步骤如下:
- 对于每个block,为其分配一个外观编码(appearance code),这是一个随机初始化的向量,用于控制block的颜色和光照。
- 对于每对相邻的block,选择一个三维区域作为匹配位置(matching location),这个区域要求在两个block中都有较高的可见度。
- 对于每个匹配位置,冻结两个block对应的NeRF网络的权重,只优化其中一个block的外观编码,使得两个block在该位置渲染出来的颜色值之间的L2损失最小。
- 重复上述步骤,直到所有相邻的block都进行了外观匹配。
以此实现大场景中不同block之间外观上的对齐,如图6所示。
实验结果




相关文章:
论文阅读《Block-NeRF: Scalable Large Scene Neural View Synthesis》
论文地址:https://arxiv.org/pdf/2202.05263.pdf 复现源码:https://github.com/dvlab-research/BlockNeRFPytorch 概述 Block-NeRF是一种能够表示大规模环境的神经辐射场(Neural Radiance Fields)的变体,将 NeRF 扩展到…...
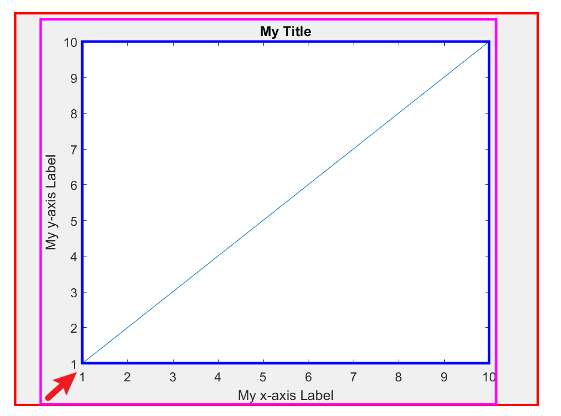
【Matlab】如何设置多个y轴
MTALAB提供了创建具有两个y轴的图,通过help yyaxis就能看到详细的使用方式。 但是如果要实现3个及以上y轴的图,就没有现成的公式使用了,如下图所示。 具体代码 % 数据准备 x10:0.01:10; y1sin(x1); x20:0.01:10; y2cos(x2); x30:0.01:10;…...

圆桌(满足客人空座需求,合理安排客人入座圆桌,准备最少的椅子)
CSDN周赛第30期第四题算法解析。 (本文获得CSDN质量评分【91】)【学习的细节是欢悦的历程】Python 官网:https://www.python.org/ Free:大咖免费“圣经”教程《 python 完全自学教程》,不仅仅是基础那么简单…… 地址:https://lq…...

如何入门大数据?
我们首先了解一下大数据到底是什么~ 大数据开发做什么? 大数据开发分两类,编写Hadoop、Spark的应用程序和对大数据处理系统本身进行开发。 大数据开发工程师主要负责公司大数据平台的开发和维护、相关工具平台的架构设计与产品开发、网络日志大数据分…...

如何在Vite项目中使用Lint保证代码质量
通常,大型前端项目都是多人参与的,由于开发者的编码习惯和喜好都不尽相同,为了降低维护成本,提高代码质量,所以需要专门的工具来进行约束,并且可以配合一些自动化工具进行检查,这种专门的工具称为Lint,可能大家接触得最多就是ESLint。 对于实现自动化代码规范检查及修…...
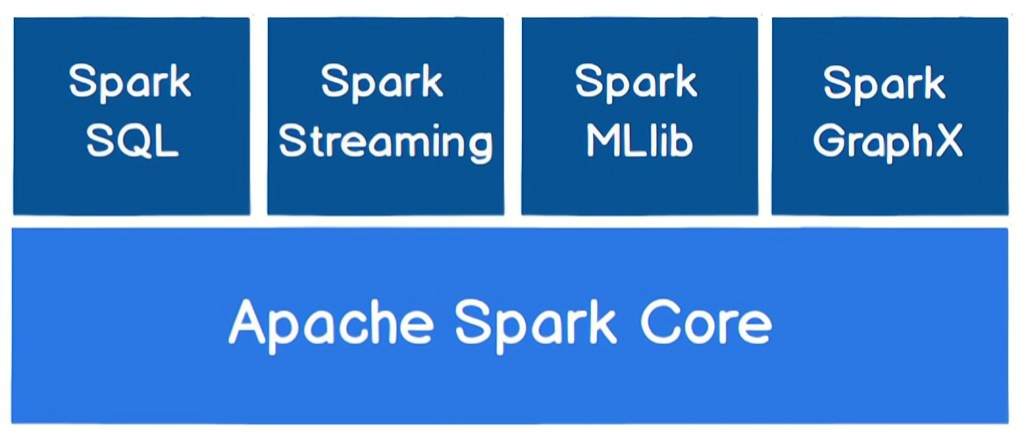
Spark高手之路1—Spark简介
文章目录Spark 概述1. Spark 是什么2. Spark与Hadoop比较2.1 从时间节点上来看2.2 从功能上来看3. Spark Or Hadoop4. Spark4.1 速度快4.2 易用4.3 通用4.4 兼容5. Spark 核心模块5.1 Spark-Core 和 弹性分布式数据集(RDDs)5.2 Spark SQL5.3 Spark Streaming5.4 Spark MLlib5.5…...

社科院与杜兰大学金融管理硕士项目——人生没有太晚的开始,不要过早的放弃
经常听到有人问,“我都快40了,现在学车晚不晚呢”“现在考研晚不晚?”“学画画晚不晚?”提出这些疑问的人,往往存在拖延,想法只停留在想的阶段,从来不去行动。当看到周边行动起来的人开始享受成…...

Spatial-Temporal Graph ODE Networks for Traffic Flow Forecasting
Spatial-Temporal Graph ODE Networks for Traffic Flow Forecasting 摘要 交通流量的复杂性和长范围时空相关性是难点 经典现存的工作: 1.利用浅图神经网络(shallow graph convolution networks)和 时间提取模块去分别建模空间和时间依赖…...
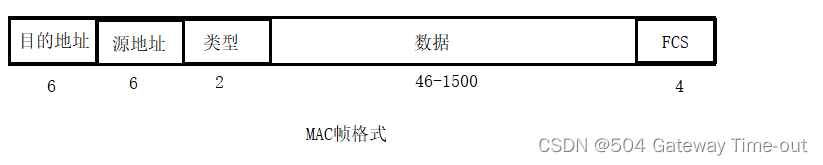
IP协议+以太网协议
在计算机网络体系结构的五层协议中,第三层就是负责建立网络连接,同时为上层提供服务的一层,网络层协议主要负责两件事:即地址管理和路由选择,下面就网络层的重点协议做简单介绍~~ IP协议 网际协议IP是TCP/IP体系中两…...
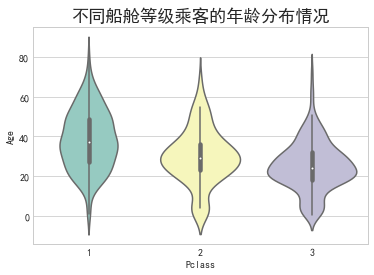
可视化组件届的仙女‖蝴蝶结图、玫瑰环图、小提琴图
在上一篇内容中为大家介绍了几个堪称可视化组件届吴彦祖的高级可视化图表。既然帅哥有了,怎么能少得了美女呢?今天就为大家介绍几个可视化组件届的“美女姐姐”,说一句是组件届的刘亦菲不为过。蝴蝶结图蝴蝶结图因其形似蝴蝶结而得名…...

人的高级认知:位置感
你知道吗?人有个高级认知:位置感 位置感是啥?咋提高位置感? 趣讲大白话:知道自己几斤几两 【趣讲信息科技99期】 ******************************* 位置感 就是对自己所处环境和自身存在的领悟 属于人生智慧 来源于阅历…...
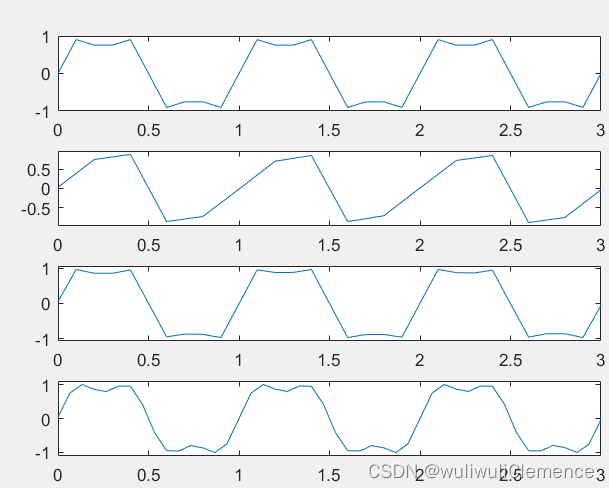
MATLAB——信号的采样与恢复
**题目:**已知一个连续时间信号 其中:f01HZ,取最高有限带宽频率fm5f0。分别显示原连续时间信号波形和 3种情况下抽样信号的波形。并画出它们的幅频特性曲线,并对采样后的信号进行恢复。 step1.绘制出采样信号 这部分相对简单…...

Docker Nginx 反向代理
最近在系统性梳理网关的知识,其中网关的的功能有一个是代理,正好咱们常用的Nginx也具备次功能,今天正好使用Nginx实现一下反向代理,与后面网关的代理做一个对比,因为我使用的docker安装的Nginx,与直接部署N…...

手把手教你实现书上的队列,进来试试?
一.队列的基本概念队列的定义队列(queue)是只允许在一端进行插入操作,而在另一端进行删除操作的线性表。队列是一种先进先出(First In First Out)的线性表,简称FIFO。允许插入的一端称为队尾,允…...
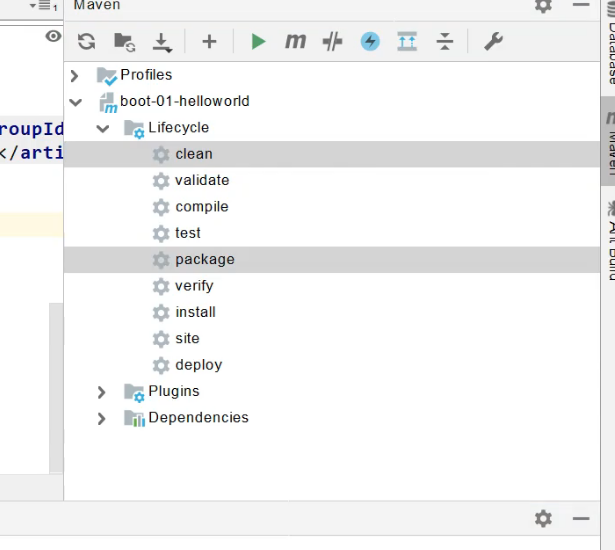
【springboot】springboot介绍
学习资料 SpringBoot 语雀 (yuque.com)【尚硅谷】SpringBoot2零基础入门教程(spring boot2干货满满)_哔哩哔哩_bilibiliSpringBoot2核心技术与响应式编程: SpringBoot2核心技术与响应式编程 (gitee.com) Spring 和Springboot 1、Spring能做什么 1.1…...
PMP项目管理项目整合管理
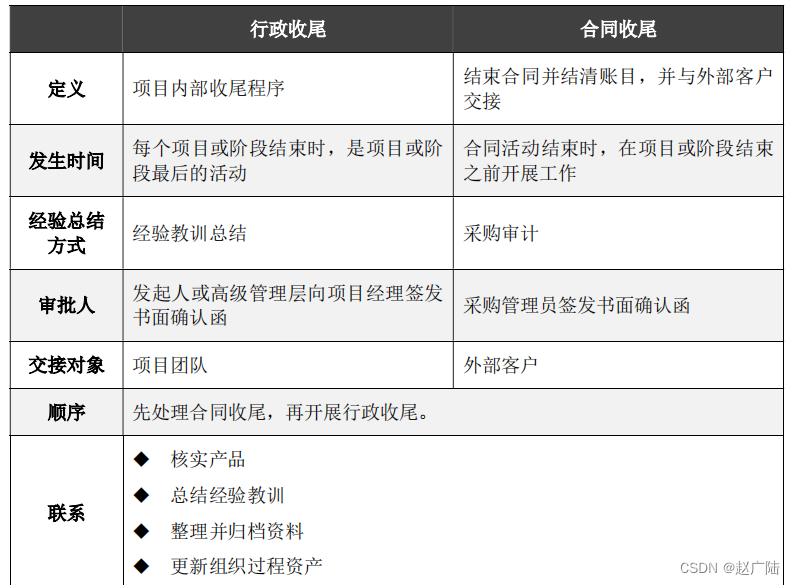
目录1 项目整合管理概述2 制定项目章程3 制定项目管理计划4 指导与管理项目工作5 管理项目知识6 监控项目工作7 实施整体变更控制8 结束项目或阶段1 项目整合管理概述 项目整合管理包括对隶属于项目管理过程组的各种过程和项目管理活动进行识别、定义、组合、统一和协调的各个…...
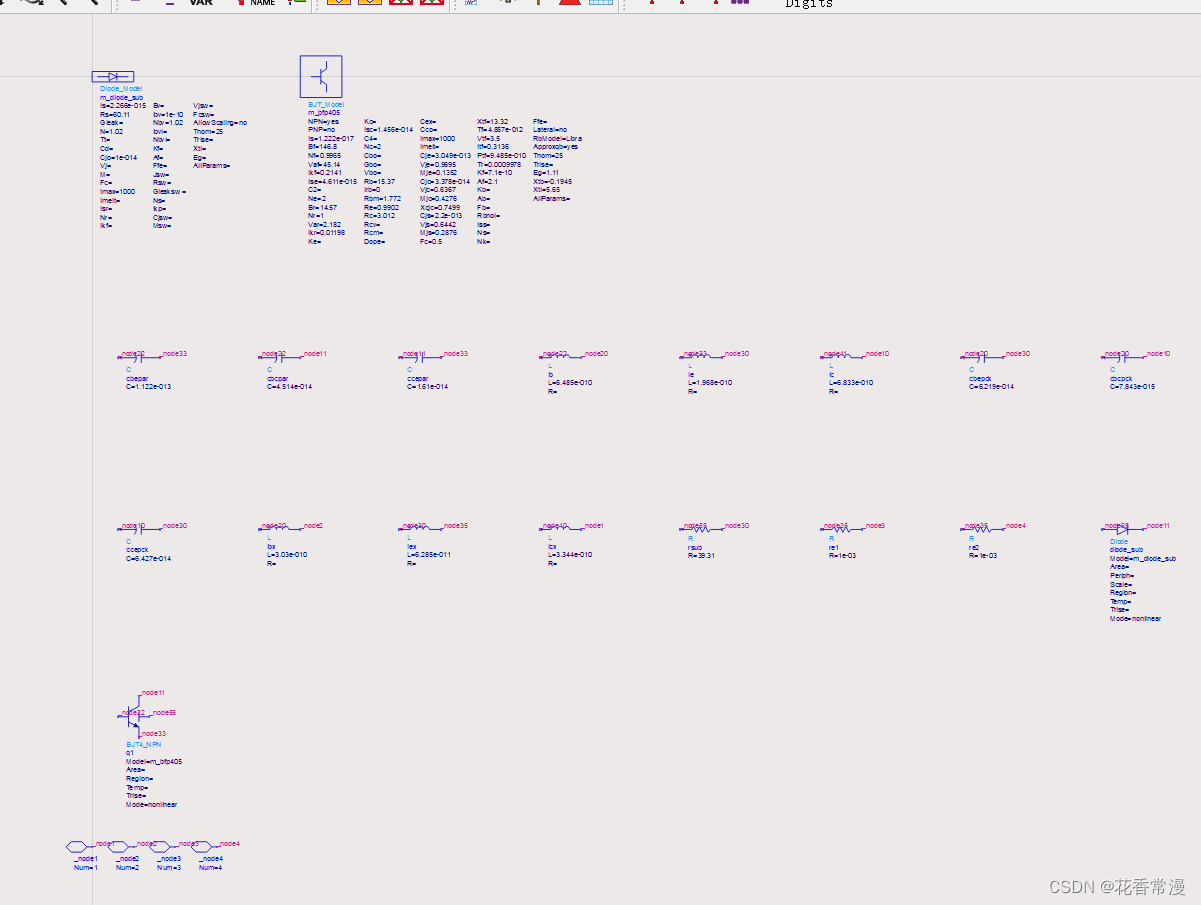
ADS中导入SPICE模型
这里写目录标题在官网中下载SPICE模型ADS中导入SPICE模型在官网中下载SPICE模型 英飞凌官网 ADS中导入SPICE模型 点击option,设置导入选项 然后点击ok 如果destination选择当前的workspace,那么导入完成之后如下: (推荐使用…...
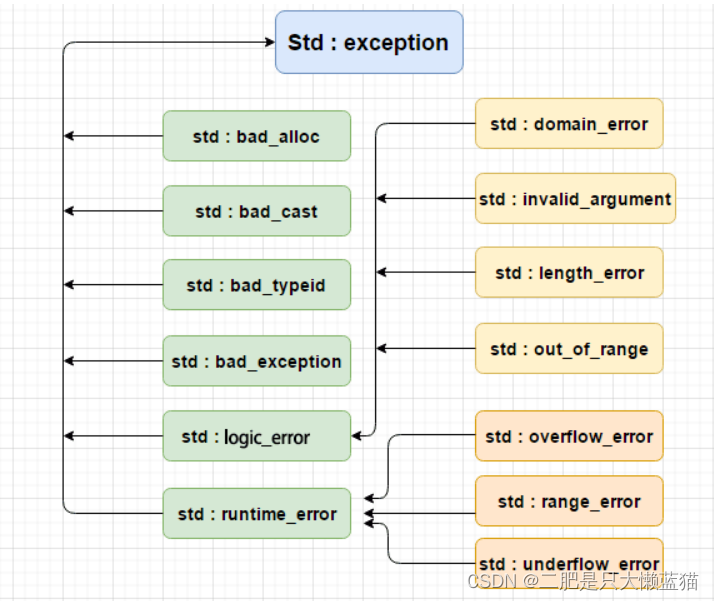
C++:异常
在学习异常之前,来简单总结一下传统的处理错误的方式: 1. 终止程序,如assert,缺陷:用户难以接受。如发生内存错误,除0错误时就会终止程序。 2. 返回错误码,缺陷:需要程序员自己去查找…...
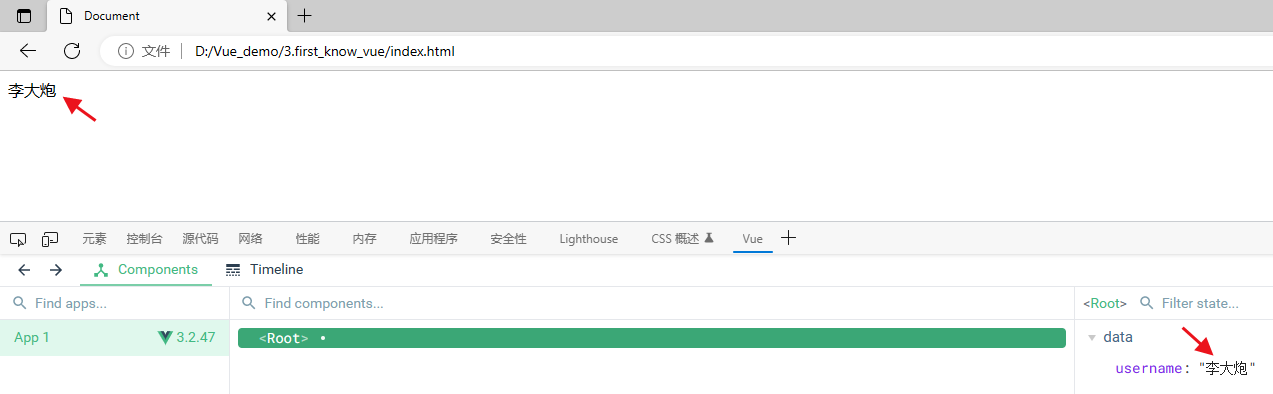
3.初识Vue
目录 1 vue 浏览器调试工具 1.1 安装 1.2 配置 2 数据驱动视图与双向数据绑定 3 简单使用 3.1 下载 3.2 将信息渲染到DOM上 4 使用vue浏览器调试工具 5 vue指令 1 vue 浏览器调试工具 chrome可能是我浏览器的原因,装上用不了,我们使…...

【C语言复习】程序的编译与链接
程序的编译与链接写在前面程序的编译与链接编译的过程程序编译环境程序执行过程编译链接的过程预处理预处理符号#define条件编译写在前面 程序的编译与链接是C语言中非常重要的一节。关键点在于详解C语言的程序编译和链接、宏的定义和与函数的区别、条件编译等知识。 程序的编…...

从‘能用’到‘好用’:给你的Vue+Element后台管理系统布局加点儿‘细节’
从‘能用’到‘好用’:VueElement后台管理系统的细节打磨指南 后台管理系统作为企业级应用的核心枢纽,其用户体验直接影响着运营效率和操作愉悦度。许多开发者在完成基础功能搭建后,常常陷入"能用但不好用"的困境——系统虽然跑得通…...

从仿真到调试:FSDB与VPD波形文件的生成与高效查看指南
1. 数字IC验证中的波形文件:为什么它们如此重要? 在数字IC验证的世界里,波形文件就像是工程师的"显微镜"。想象一下,你正在调试一个复杂的RTL设计,代码运行了,但结果不对。这时候,如果…...

46页可编辑PPT | 企业数字化转型总体规划与实践汇报方案
很多企业在数字化转型过程中会遇到一些共同的痛点。比如,数据孤岛问题,不同部门的数据互不相通,导致信息共享困难;业务流程繁琐,效率低下,难以快速响应市场变化;技术更新换代快,现有…...
的5次机会与触发逻辑)
你的手机变砖前兆?聊聊Android救援模式(Rescue Mode)的5次机会与触发逻辑
你的手机变砖前兆?聊聊Android救援模式(Rescue Mode)的5次机会与触发逻辑 最近有位朋友在群里吐槽:"新装的购物App让手机卡成幻灯片,重启三次都没用,最后居然弹窗问我要不要恢复出厂设置?"这其实是触发了And…...

从ANSI到EBCDIC:跨越地域与时代的字符编码全景解析
1. 字符编码的前世今生:从ASCII到EBCDIC 第一次在Windows记事本里保存文件时,看到"ANSI"这个选项我就懵了——这玩意儿和ASCII有什么关系?后来在跨国项目里处理日文数据时,更被SJIS和EUC-JP搞得焦头烂额。字符编码就像…...

抖音视频无水印下载:3分钟快速上手免费工具完整指南
抖音视频无水印下载:3分钟快速上手免费工具完整指南 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback support…...
RT-DTER最新创新改进系列:(购买资料的粉丝反馈涨点的TOP1模块)我们将BiFPN的加权双向融合之力,注入RT-DETR的端到端Transformer架构,创新与涨点的双丰收!!!!!!
RT-DTER最新创新改进系列:(购买资料的粉丝反馈涨点的TOP1模块)我们将BiFPN的加权双向融合之力,注入RT-DETR的端到端Transformer架构,创新与涨点的双丰收!! 购买相关资料后畅享一对一答疑&#…...

iOS激活锁终极绕过指南:开源工具applera1n的完整解决方案
iOS激活锁终极绕过指南:开源工具applera1n的完整解决方案 【免费下载链接】applera1n icloud bypass for ios 15-16 项目地址: https://gitcode.com/gh_mirrors/ap/applera1n 面对iOS设备激活锁的困扰,你是否曾为无法使用二手iPhone而烦恼&#x…...

为AI编程助手设置安全规则:从原理到实践的工程指南
1. 项目概述:为你的AI编程伙伴戴上“紧箍咒”如果你和我一样,深度使用Cursor这类AI编程助手,那你一定体验过那种“冰火两重天”的感觉。一方面,它能以惊人的速度生成代码、重构函数、甚至解释复杂逻辑,极大地提升了开发…...

BepInEx IL2CPP启动失败终极解决指南:从异常诊断到游戏正常运行
BepInEx IL2CPP启动失败终极解决指南:从异常诊断到游戏正常运行 【免费下载链接】BepInEx Unity / XNA game patcher and plugin framework 项目地址: https://gitcode.com/GitHub_Trending/be/BepInEx BepInEx作为Unity游戏插件框架,为玩家和开发…...