自动驾驶---Perception之视觉点云雷达点云
1 前言
在自动驾驶领域,点云技术的发展历程可以追溯到自动驾驶技术的早期阶段,特别是在环境感知和地图构建方面。
在自动驾驶技术的早期技术研究中,视觉点云和和雷达点云都有出现。20世纪60年代,美国MIT的Roberts从2D图像中提取3D多面体,这被认为是3D计算机视觉研究的开端。随后激光雷达作为一种关键的传感器被广泛应用于环境感知和障碍物检测。激光雷达通过发射激光束并接收反射回来的信号,生成点云数据,从而提供周围环境的三维信息。早期的研究主要集中在如何有效地处理和分析这些点云数据,以实现对周围环境的准确感知和理解。
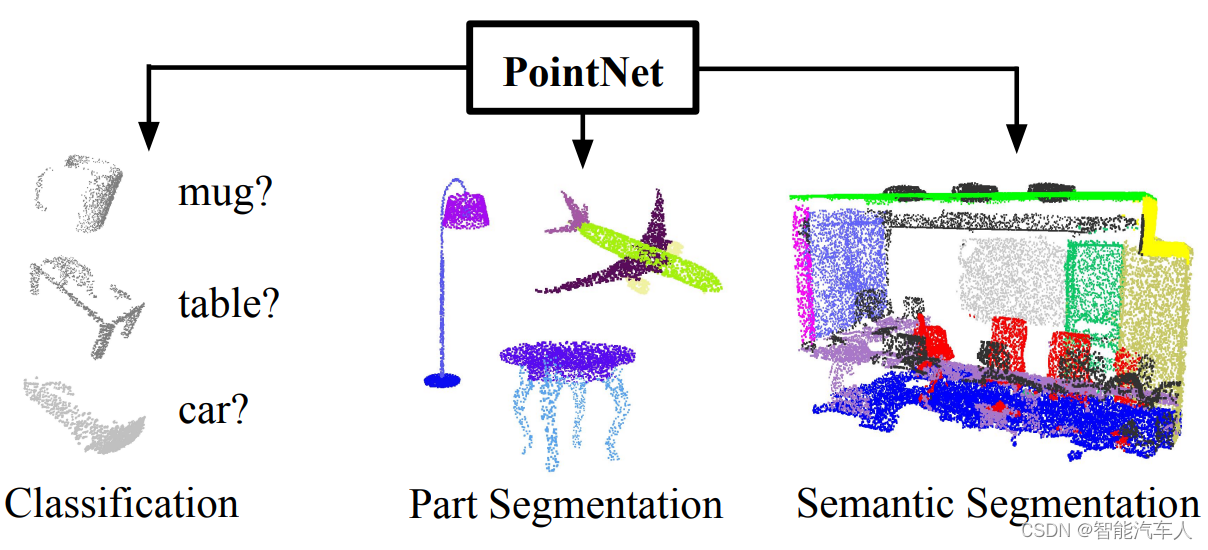
随着自动驾驶技术的不断发展,点云处理技术也得到了显著的进步。研究人员提出了各种算法和方法,用于点云的分割、分类、物体检测、跟踪和地图构建等任务。其中,深度学习技术的引入为点云处理带来了革命性的变化。深度学习模型,特别是卷积神经网络(CNN)和点云处理网络(如PointNet、PointNet++等),以及后来的Transformer能够自动学习点云数据的特征表示,并实现对周围环境的更准确感知和理解。
2 点云介绍
2.1 点云技术概述
点云是将大量离散的三维坐标点组成的数据集,每个点代表空间中的一个位置。在自动驾驶中,激光雷达等传感器收集到的环境信息通常以点云的形式表示。点云数据包含了车辆周围环境的三维信息,如物体的形状、位置、大小等。
2.2 点云技术的优缺点
(1)优点
- 高度灵活性:点云可以用于表示任何类型的三维形状,包括不规则形状,提供了极高的表达自由度。
- 数据密度可变性:点云的密度可以非常不同,从只包含一个点到包含数百万个数据点的高密度点云,这种灵活性使得点云技术可以适应不同的应用需求。
- 附加信息丰富性:除了基本的三维坐标外,点云数据还可能包含其他属性,如颜色、分类值、强度值和时间等,这些附加信息为后续处理提供了更多的可能性。
- 三维空间表达:点云可以准确地表达物体的空间轮廓和具体位置,提供了物体与摄像机之间的距离信息。
- 视角无关性:点云本身和视角无关,可以任意旋转,从不同角度和方向观察一个点云,而且不同的点云只要在同一个坐标系下就可以直接融合。
(2)缺点
- 数据处理的复杂性:三维点云相比二维图像多了一个维度,即深度,这增加了数据处理的复杂性。同时,点云是不规则分布的,相比于图像式的规整网格更难处理。
- 信息丢失问题:点云由离散的点组成,相比于连续的图像,它缺少了纹理信息,这可能导致在处理过程中丢失一些重要信息。
- 数据采集与处理的挑战:在采集点云数据时,可能会得到散乱的点云,这些点之间缺乏明确的拓扑关系,导致近邻搜索的效率较低。同时,由于环境和设备的影响,点云数据中可能会出现噪声。此外,采集得到的点云数据量往往较大,需要进一步精简才能满足后续算法处理的需要。
- 法向量估计与调整的困难:点云的法向量估计与调整是许多高级点云处理算法的基础。然而,目前存在的多种法向量估计算法具有不同的效率和性能,以及各自适用的应用场景。同时,面向普通工件的法向量调整算法效率也较低。
- 曲面重建的局限性:传统的曲面重建算法往往不会考虑尖锐特征,这可能导致重建后的尖锐特征变得光滑,从而使点云整体重建的精度降低。
2.3 点云技术在自动驾驶中的应用
- 障碍物检测与识别:通过点云算法对激光雷达采集到的点云数据进行分割和分类,识别出行人、车辆、自行车等障碍物,为自动驾驶系统提供精确的感知信息。
- 道路分割与车道线检测:通过分析点云数据中的几何特征和反射强度等信息,提取出道路区域并检测车道线的位置和形状。
- 环境建模与感知:提供高精度的环境感知和建模能力,建立周围环境的三维模型,包括道路、建筑物、交通标志等元素。
- 地图构建与定位:通过融合和配准多个时间步的点云数据,构建高精度的三维地图,并实现车辆的定位和姿态估计。
3 视觉点云
3.1 视觉点云技术介绍
视觉点云技术是一种重要的三维数据获取和处理方法,它结合了计算机视觉和点云技术的优势,为三维空间信息的获取提供了有效手段。
视觉点云技术的基本原理是通过光电系统(如照相机)获取图像,并根据计算机视觉的原理从图像中计算出三维孤立点信息。这通常涉及到对图像进行特征提取、匹配和三维重建等步骤。通过这些步骤,可以从二维图像中恢复出三维空间结构,并生成点云数据。
视觉点云技术具有一些独特的优势。首先,它能够利用丰富的图像信息来生成点云数据,包括颜色、纹理等特征,这使得点云数据更加真实和详细。其次,视觉点云技术可以通过多视图图像来增强点云的完整性和精度,通过结合多个视角的图像信息,可以得到更加全面和准确的三维空间信息。此外,随着计算机视觉技术的不断发展,视觉点云技术在处理速度、自动化程度以及数据处理精度等方面也在不断提升。
视觉点云技术在许多领域都有广泛的应用。例如,在机器人导航和自动驾驶领域,视觉点云技术可以用于环境感知和障碍物检测,为机器人或车辆提供精确的三维空间信息,实现精准导航和运动规划。在增强现实和虚拟现实领域,视觉点云数据可以构建真实的三维环境,与虚拟对象进行融合,创造沉浸式的交互体验。此外,视觉点云技术还可以应用于建筑设计与管理、机器视觉与目标识别、三维测绘与监测等领域,为各种应用提供准确、可靠的三维数据支持。
视觉点云技术虽然也面临一些挑战和限制(例如,光照条件、遮挡和纹理缺乏等因素可能影响视觉点云的精度和完整性,大规模点云数据的处理和分析也需要较高的计算资源和算法支持),但是视觉点云技术是一种重要的三维数据获取和处理方法,具有广泛的应用前景。随着技术的不断进步和算法的优化,视觉点云技术将在更多领域发挥重要作用,为我们的生活和工作带来更多便利和创新。
3.2 视觉点云技术应用
视觉点云技术在自动驾驶领域的应用具有重要地位,为车辆提供了高精度、实时的环境感知能力。以下是关于视觉点云技术在自动驾驶应用中的详细介绍:
- 环境感知与障碍物检测
视觉点云技术通过捕捉车辆周围环境的图像,并从中提取出三维点云数据,使得自动驾驶系统能够精准地感知周围环境。这些点云数据包含了道路、车辆、行人、建筑物等元素的详细信息,使得自动驾驶车辆能够实时识别并跟踪这些障碍物。通过对点云数据的分析,系统可以判断障碍物的位置、大小、形状和运动状态,从而为车辆提供及时的避障和制动措施,确保行驶的安全性。
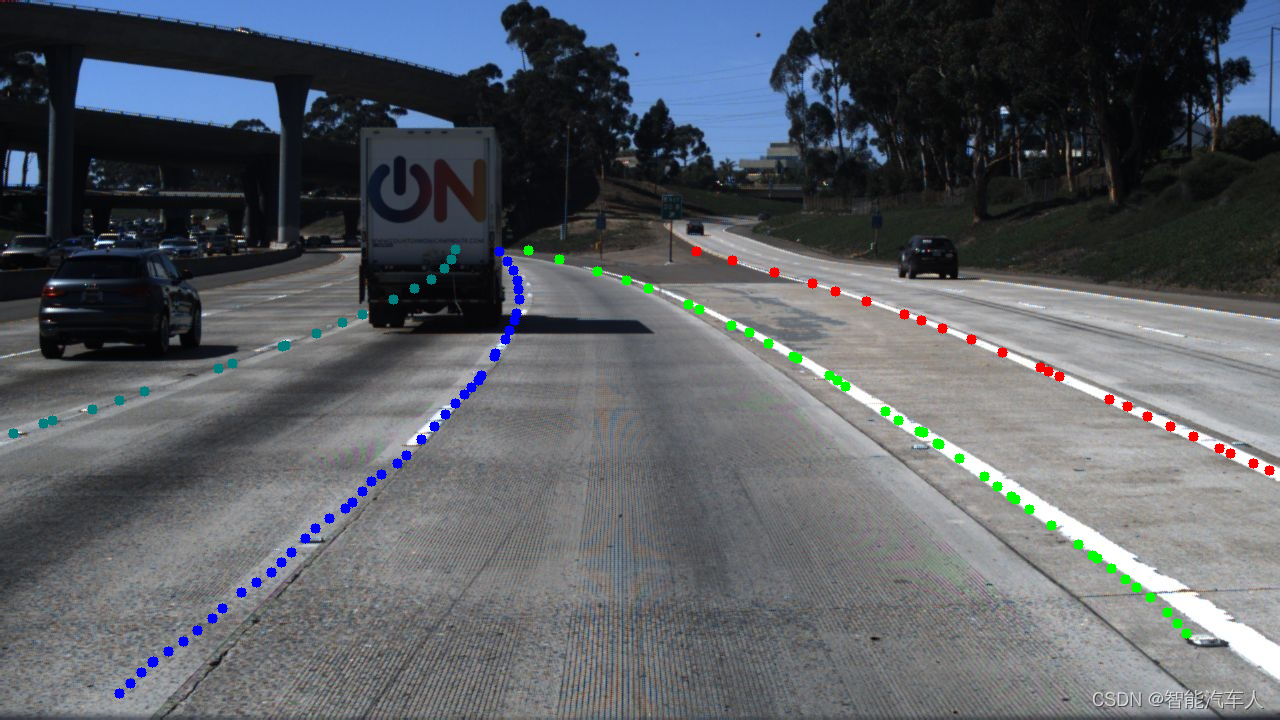
- 道路分割与车道线检测
利用视觉点云技术,自动驾驶系统可以实现对道路的精确分割和车道线的检测。通过对点云数据的处理和分析,系统能够识别出道路的边缘、车道线以及不同区域的界限,从而为车辆提供准确的导航信息。这对于自动驾驶车辆在复杂道路环境中的行驶至关重要,有助于车辆保持正确的行驶轨迹,避免偏离车道或发生其他危险情况。
- 高精度地图构建与定位
视觉点云技术还可以用于构建高精度地图,并为自动驾驶车辆提供精确的定位信息。通过对大量点云数据的采集和处理,可以生成包含丰富地理信息的三维地图,包括道路结构、交通标志、障碍物位置等。这些地图信息可以用于辅助自动驾驶系统的决策规划,提高车辆行驶的安全性和可靠性。同时,视觉点云技术还可以实现车辆的高精度定位,通过与地图信息的匹配,确定车辆在道路上的准确位置,为自动驾驶提供关键的支持。
- 夜间与恶劣天气下的应用
相比其他传感器,视觉点云技术对于光照条件的依赖度较低,因此在夜间或恶劣天气下也能保持较好的感知性能。这意味着自动驾驶车辆在光线不足或恶劣天气条件下,仍能通过视觉点云技术获取到足够的环境信息,保证车辆的安全行驶。
视觉点云技术在自动驾驶领域的应用为车辆提供了强大的环境感知能力,使得自动驾驶系统能够更加精准地识别障碍物、检测道路信息,并构建高精度地图,为自动驾驶的普及和发展提供了有力的支持。随着技术的不断进步和算法的优化,视觉点云技术在自动驾驶领域的应用将会更加广泛和深入。
4 LiDAR 点云
4.1 LiDAR点云技术介绍
LiDAR(Light Detection and Ranging,激光雷达)点云技术是一种利用激光雷达设备获取空间点云数据的技术。它通过向目标发射激光脉冲并测量其反射回来的时间,结合发射角度和距离信息,精确计算出目标上点的三维坐标,从而生成点云数据。
LiDAR点云技术具有许多显著的优势。首先,它具有高精度和高分辨率的特点,能够获取详细而准确的三维空间信息。其次,LiDAR设备不受光照条件的影响,可以在各种环境条件下进行数据采集,包括夜间、阴天或高亮度区域。此外,LiDAR技术还具有较强的穿透能力,能够部分地穿透树林、建筑物等遮挡物,获取被遮挡部分的真实地形信息。
在LiDAR点云数据的获取过程中,激光雷达设备通过快速旋转并发射激光脉冲,扫描周围环境并收集反射信号。然后,通过一系列的数据处理步骤,包括滤波、配准、分割和分类等,将原始的点云数据转化为可用于后续分析和应用的形式。这些处理步骤有助于提高点云数据的质量和可用性,使其更适合于各种应用场景。
LiDAR点云技术在多个领域具有广泛的应用。在测绘领域,它可以用于地形测绘、建筑物测量和城市规划等方面,提供高精度的三维地形数据。在环境监测领域,LiDAR点云技术可以用于森林覆盖监测、植被变化分析和地形变化检测等任务,帮助人们更好地了解自然环境的演变过程。此外,在自动驾驶和机器人导航领域,LiDAR点云技术也发挥着重要作用,用于实现精准的环境感知和障碍物检测。
LiDAR点云技术也存在一些挑战和限制。例如,设备的成本较高,且数据处理和分析需要较高的计算资源和专业技能。此外,对于某些特殊环境或目标,如高反射表面或透明物体,LiDAR技术的测量精度可能受到一定限制。总体来看,LiDAR点云技术是一种高效、准确的三维数据获取方法,具有广泛的应用前景。随着技术的不断进步和成本的降低,它将在更多领域发挥重要作用,为我们的生活和工作带来更多便利和创新。
4.2 LiDAR点云技术应用
LiDAR(Light Detection and Ranging,激光雷达)点云技术在自动驾驶领域的应用至关重要,为车辆提供了精确、实时的环境感知能力。以下是关于LiDAR点云技术在自动驾驶中的详细应用介绍:
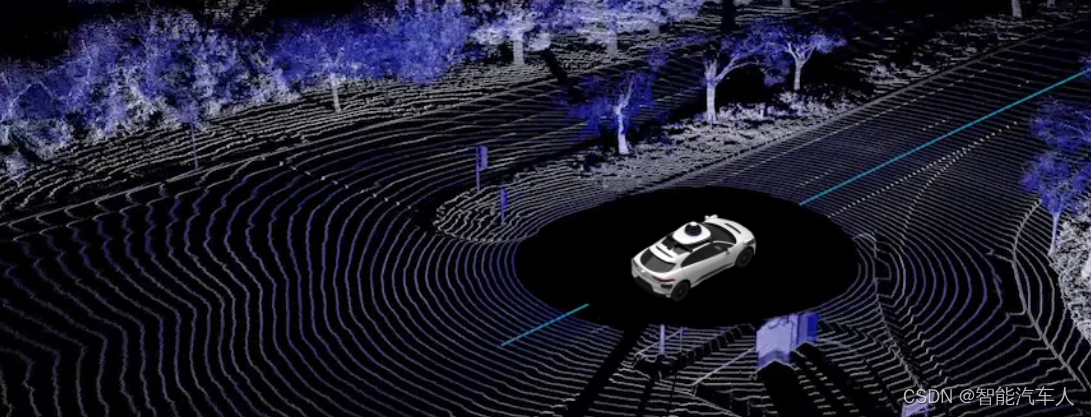
- 高精度环境感知
LiDAR点云技术通过发射激光脉冲并测量其反射时间,获取车辆周围环境的精确三维点云数据。这些数据不仅包含物体的位置信息,还能反映物体的形状、大小等特征。因此,自动驾驶车辆能够利用LiDAR点云数据实时感知道路、车辆、行人、障碍物等周围环境信息,为决策规划提供关键输入。
- 障碍物检测与避障
通过LiDAR点云技术,自动驾驶车辆能够精确地识别并跟踪周围的障碍物。系统可以根据点云数据的密度和反射强度等信息,判断障碍物的类型、位置和运动状态。当检测到潜在危险时,车辆可以迅速作出反应,采取避障措施,确保行驶安全。
- 高精度地图构建与定位
LiDAR点云技术可用于构建高精度地图,这对于自动驾驶车辆来说至关重要。通过采集大量的点云数据,并结合其他传感器信息,可以生成包含丰富地理信息的三维地图。这些地图不仅可以帮助车辆实现精确定位,还可以为路径规划和导航提供关键支持。同时,结合SLAM(同时定位与地图构建)技术,车辆还可以实时更新地图信息,适应不断变化的环境。
- 道路分割与车道线检测
利用LiDAR点云技术,自动驾驶车辆可以精确地分割道路并检测车道线。通过分析点云数据的分布和特征,系统可以识别出道路的边缘、车道线以及不同区域的界限。这些信息有助于车辆保持正确的行驶轨迹,避免偏离车道或发生其他危险情况。
- 多传感器融合
在自动驾驶系统中,LiDAR点云技术通常与其他传感器(如相机、毫米波雷达等)进行融合使用。通过融合多种传感器的数据,可以提高环境感知的准确性和可靠性。例如,相机可以提供丰富的颜色和纹理信息,而LiDAR则可以提供精确的距离和深度信息。通过将这些信息相结合,自动驾驶车辆可以更好地理解周围环境,并作出更准确的决策。
- 夜间与恶劣天气下的应用
LiDAR点云技术不受光照条件的影响,因此在夜间或恶劣天气下仍能保持良好的感知性能。这使得自动驾驶车辆在光线不足或恶劣天气条件下仍能准确感知周围环境,确保行驶安全。
LiDAR点云技术在自动驾驶领域的应用为车辆提供了强大的环境感知能力,有助于实现更安全、更可靠的自动驾驶。随着技术的不断进步和成本的降低,LiDAR点云技术将在自动驾驶领域发挥越来越重要的作用。
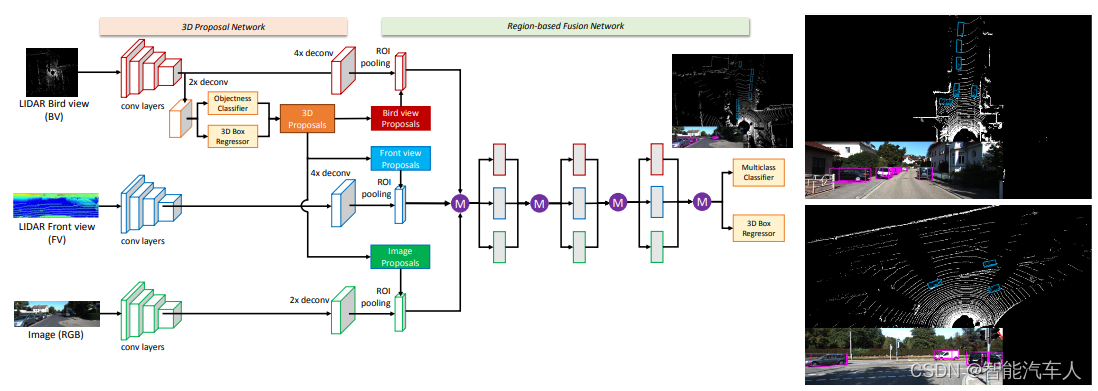
下图是融合了视觉和激光雷达的数据,得到最终的环境信息。
5 总结与展望
目前的自动驾驶技术发展中,视觉信息基本都是通过特征提取之后进行模型训练学习,得到想要的信息;而Lidar的点云信息目前应用还比较广泛,可直接通过点云构建的数据进行模型训练得到障碍物信息,也可从点云中提取有效信息构建障碍物。
随着自动驾驶技术的不断发展,点云技术将继续发挥重要作用。未来,点云技术将与传感器数据(如摄像头、雷达)进行更紧密的融合,以提供更全面和准确的环境感知。此外,随着深度学习等先进技术的不断应用,点云处理算法的性能将进一步提升,为自动驾驶系统提供更强大的支持。
相关文章:
自动驾驶---Perception之视觉点云雷达点云
1 前言 在自动驾驶领域,点云技术的发展历程可以追溯到自动驾驶技术的早期阶段,特别是在环境感知和地图构建方面。 在自动驾驶技术的早期技术研究中,视觉点云和和雷达点云都有出现。20世纪60年代,美国MIT的Roberts从2D图像中提取3D…...
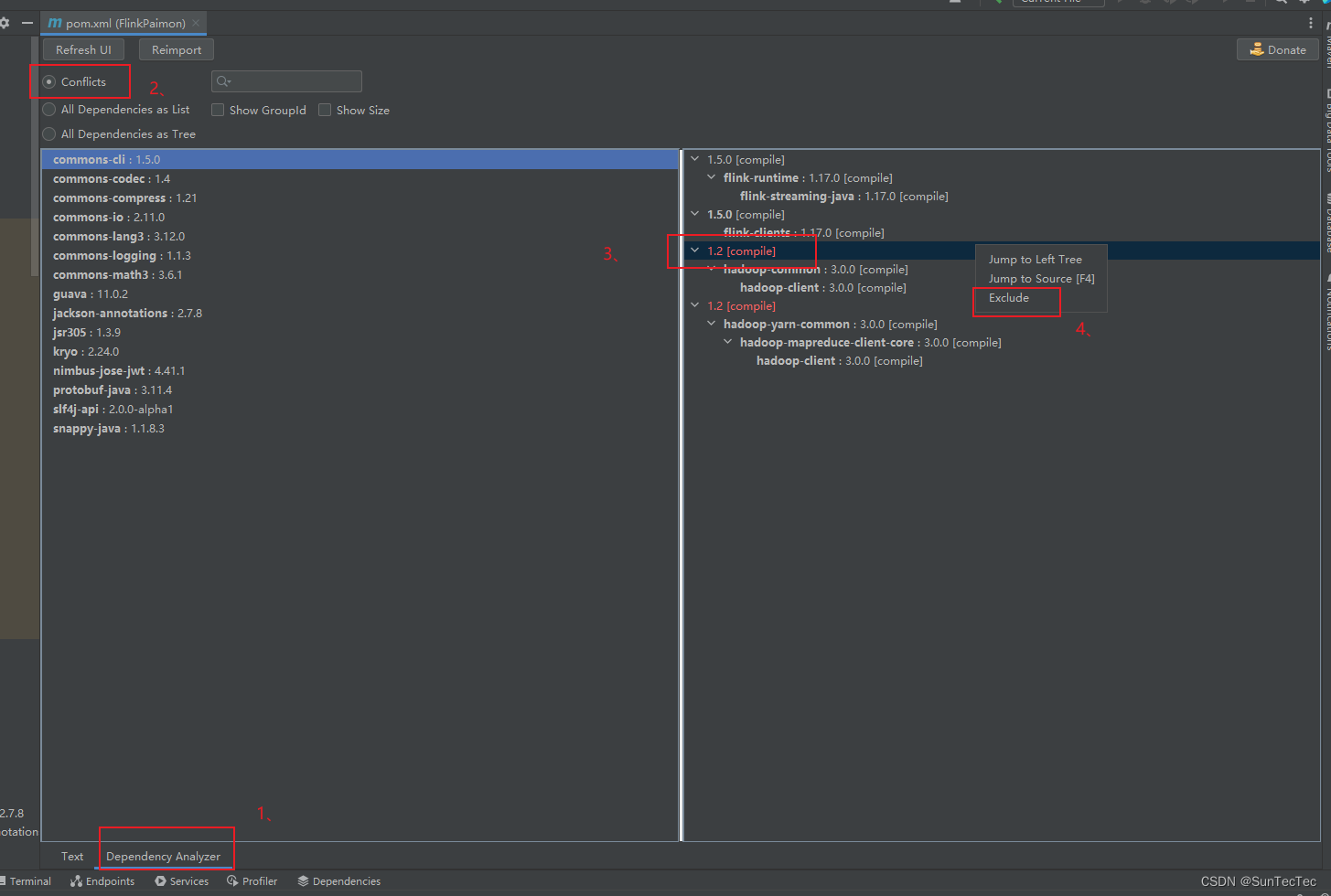
maven 显式依赖包包含隐式依赖包,引起依赖包冲突
问题:FlinkCDC 3.0.1 代码 maven依赖包冲突 什么是依赖冲突 依赖冲突是指项目依赖的某一个jar包,有多个不同的版本,因而造成类包版本冲突 依赖冲突的原因 依赖冲突很经常是类包之间的间接依赖引起的。每个显式声明的类包都会依赖于一些其它…...
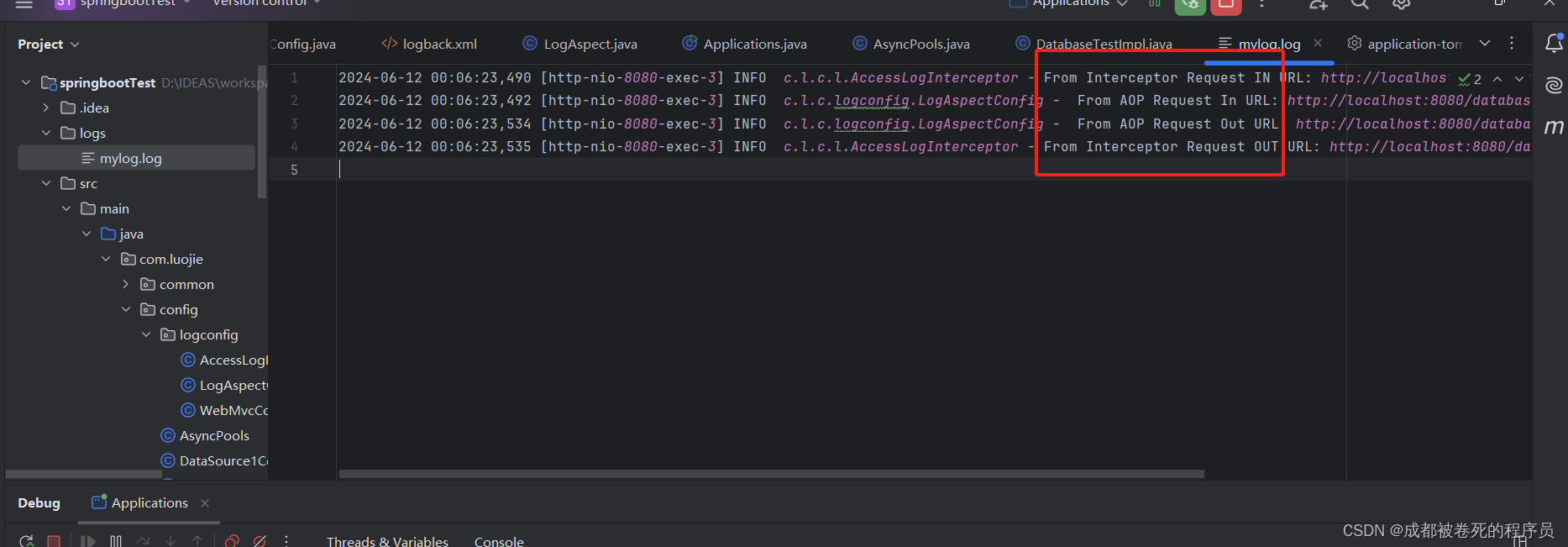
Spring应用如何打印access日志和out日志(用于分析请求总共在服务耗费多长时间)
我们经常会被问到这样一个问题。你接口返回的好慢呀,能不能提升一下接口响应时间啊?这个时候我们就需要去分析,为什么慢,慢在哪。而这首先应该做的就是确定接口返回时间过长确实是在服务内消耗的时间。而不是我们将请求发给网关或…...

SpringBoot整合SpringDataRedis
目录 1.导入Maven坐标 2.配置相关的数据源 3.编写配置类 4.通过RedisTemplate对象操作Redis SpringBoot整合Redis有很多种,这里使用的是Spring Data Redis。接下来就springboot整合springDataRedis步骤做一个详细介绍。 1.导入Maven坐标 首先,需要导…...
电脑怎么录制游戏视频?轻松捕捉每一帧精彩
随着游戏产业的蓬勃发展,越来越多的玩家不仅满足于在游戏世界中的探索与冒险,更希望将自己的游戏精彩瞬间记录下来,分享给更多的朋友。可是电脑怎么录制游戏视频呢?本文旨在为广大游戏爱好者提供一份详细的电脑游戏视频录制攻略&a…...

【Elasticsearch】索引快照并还原到其他集群
【Elasticsearch】索引快照并还原到其他集群 前提:es节点的所有用户id和组id都需要相同,最好在新建集群时指定用户id和组id,否则挂载后执行curl时会提示权限报错。 解决方法(gpt生成),不敢在生产尝试。 点…...

QT--DAY1
不使用图形化界面实现一个登陆界面 #include "widget.h"Widget::Widget(QWidget *parent): QWidget(parent) {//设置窗口标题this->setWindowTitle("登录界面");//设置窗口大小this->resize(535,410);//固定窗口大小this->setFixedSize(535,410)…...
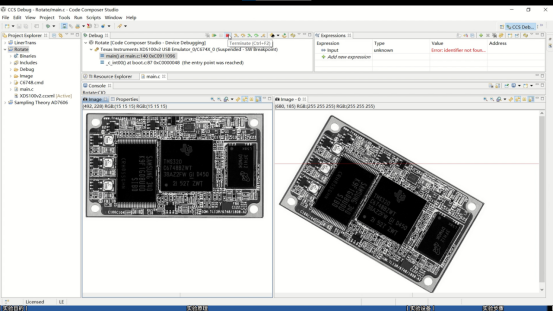
DSP教学实验箱_数字图像处理_操作教程:5-1 图像旋转
一、实验目的 学习图像旋转的原理,掌握图像的读取方法,并实现图像旋转。 二、实验原理 图像旋转 图像的旋转是指以图像的某一点为原点以逆时针或顺时针旋转一定的角度。其本质是以图像的中心为原点,将图像上的所有像素都旋转一个相同的角…...
- MyBatis实现原理(三))
MyBatis总结(2)- MyBatis实现原理(三)
核心配置 JavaBeanMapper.xml(sql映射) 作用 JavaBeanMapper.xml实现: 用来干什么? 定义Sql语句映射。相对照JDBC的实现,是将原本的Sql代码提取出来,最终根据映射关系执行Sql操作。 好处? 解…...
【保姆级教程】Linux 基于 Docker 部署 MySQL 和 Nacos 并配置两者连接
一、Linux 部署 Docker 1.1 卸载旧版本(如有) sudo yum remove docker \docker-client \docker-client-latest \docker-common \docker-latest \docker-latest-logrotate \docker-logrotate \docker-engine1.2 安装 yum-utils 包 sudo yum install -y…...

Dev C++ 安装及使用方法教程-干活多超详细
Dev C 是一款非常好用,简约的C/C开发工具。可以减少很多创建工程的繁琐步骤,很快的进行开发。对于只用于来写代码的人来说,是比较轻量以及极速的。 Dev C 是一个windows下的c和c程序的集成开发环境。它使用mingw32/gcc编译器,遵循…...

无缝滚动的swiper
看效果 看代码 <swiper :indicator-dots"true" :autoplay"true" circular :interval"3000" :duration"6000" display-multiple-items"3" easing-function"linear"><swiper-item v-for"(item,indx…...
tvm实战踩坑
今天玩了一下tvm的安装 我要安装v0.14.0的版本 所以按照官网的方法 https://tvm.apache.org/docs/install/from_source.html#python-package-installation git clone --recursive https://github.com/apache/tvm tvmgit checkout v0.14.0recursive是很重要的 这一步可以替换成…...
计算机网络之网络层知识总结
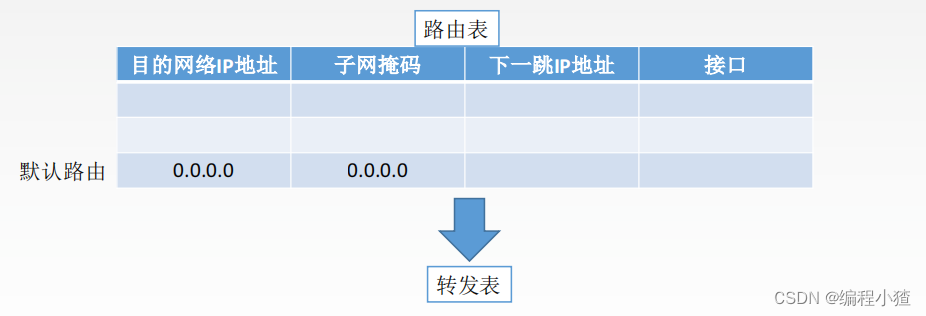
网络层功能概述 主要任务 主要任务是把分组从源端传到目的端,为分组交换网上的不同主机提供通信服务。网络层传输单位是数据报。 分组和数据报的关系:把数据报进行切割之后,就是分组。 主要功能: 路由选择与分组转发 路由器…...

利用穿戴甲虚拟试戴技术提高销量和参与度
在不断变化的美容行业,保持领先意味着拥抱创新技术。其中一项改变游戏规则的技术是人工智能驱动的虚拟指甲试戴。在穿戴甲领域,不断兴起的虚拟试戴技术对促进销售和参与度产生了重大影响。 视觉吸引力的力量 要了解虚拟试戴的重要性,必须了解…...

后端|压缩Base64图片的两种方式
Base64是一种将二进制数据编码为ASCII字符串的方法。它通过将3个字节的二进制数据转换为4个可打印字符的ASCII字符,从而将二进制数据转换为可传输的文本格式。Base64编码常用于传输图片或音频文件。Base64编码可以保证数据在传输过程中不丢失,同时可以避…...
)
HCIP认证笔记(单选题)
1、OSPF Hello报文中不包括:process ID 3、IS-IS路由的开销在narrow模式下路由的开销值取值范围是:1~63; 在wide模式下路由的开销取值范围为:1~16777215 4、attached-bit advertise never 命令可以使level-1设备不生成缺省路由; 5、OSPFv3报文封装在IPv6报文内,IPv…...

数据结构笔记-2、线性表
2.1、线性表的定义和基本操作 如有侵权请联系删除。 2.1.1、线性表的定义: 线性表是具有相同数据类型的 n (n>0) 个数据元素的有限序列,其中 n 为表长,当 n 0 时线性表是一个空表。若用 L 命名线性表,则其一般表示为&am…...
Linux基础IO【II】真的很详细
目录 一.文件描述符 1.重新理解文件 1.推论 2.证明 2.理解文件描述符 1.文件描述符的分配规则 3.如何理解文件操作的本质? 4.输入重定向和输出重定向 1.原理 2.代码实现重定向 3.dup函数 编辑 4.命令行中实现重定向 二.关于缓冲区 1.现象 …...

【C++】模板及模板的特化
目录 一,模板 1,函数模板 什么是函数模板 函数模板原理 函数模板的实例化 推演(隐式)实例化 显示实例化 模板的参数的匹配原则 2,类模板 什么是类模板 类模板的实例化 二,模板的特化 1,类模板的特化 全特化…...

终极指南:如何让2012-2015年老款Mac安装最新macOS系统
终极指南:如何让2012-2015年老款Mac安装最新macOS系统 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 您的2012-2015年老款Mac是否已被苹果官方抛…...
)
人工智能|大模型——模型——大模型蒸馏详解(定义/原理/关键技术/落地)
摘要大模型蒸馏(Model Distillation),即知识蒸馏(Knowledge Distillation),是一种将大型教师模型(如BERT、GPT-4o、DeepSeek-R1)的“隐含知识”高效迁移至轻量级学生模型(…...

5分钟精通B站音频提取:从新手到高手的开源工具实战指南
5分钟精通B站音频提取:从新手到高手的开源工具实战指南 【免费下载链接】BilibiliDown (GUI-多平台支持) B站 哔哩哔哩 视频下载器。支持稍后再看、收藏夹、UP主视频批量下载|Bilibili Video Downloader 😳 项目地址: https://gitcode.com/gh_mirrors/…...

保姆级教程:在Ubuntu 24.04上用QEMU桥接网络,让虚拟机秒连外网
在Ubuntu 24.04上实现QEMU虚拟机与宿主机网络互通的终极指南 对于需要在本地环境测试国产操作系统或运行隔离开发环境的开发者来说,QEMU虚拟化方案因其轻量高效而备受青睐。但让虚拟机与宿主机网络互通往往成为新手的第一道门槛。本文将彻底解决这个问题——通过桥接…...

AI报告文档审核赋能数据不出域:IACheck重构机械制造行业本地化质量管控体系
在机械制造行业不断推进数字化与智能化转型的过程中,“数据不出域”逐渐从合规要求演变为一种核心能力,即在保障数据安全的前提下,实现数据的高效利用与价值转化,而在这一背景下,检测报告作为连接生产过程与质量评估的…...

m4s-converter:释放B站缓存价值的格式转换利器
m4s-converter:释放B站缓存价值的格式转换利器 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 价值对比:格式转换前后的效…...

PakePlus云打包入门指南:从零到一的GitHub Token配置与安全实践
PakePlus云打包入门指南:从零到一的GitHub Token配置与安全实践 【免费下载链接】PakePlus Turn any webpage/HTML/Vue/React and so on into desktop and mobile app under 5M with easy in few minutes. 轻松将任意网站/HTML/Vue/React等项目构建为轻量级(小于5M)…...
 - 机器数据管理和分析)
Splunk Enterprise 9.4.10 (macOS, Linux, Windows) - 机器数据管理和分析
Splunk Enterprise 9.4.10 (macOS, Linux, Windows) - 机器数据管理和分析 安全信息和事件管理 (SIEM)、全面的日志管理和分析平台 请访问原文链接:https://sysin.org/blog/splunk-9/ 查看最新版。原创作品,转载请保留出处。 作者主页:sys…...

AMD Ryzen系统管理单元深度调试:SMUDebugTool技术解析与实战指南
AMD Ryzen系统管理单元深度调试:SMUDebugTool技术解析与实战指南 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址: …...

CentOS7下KingbaseES V9与MySQL性能对比实测:从安装到查询优化的全流程体验
CentOS7下KingbaseES V9与MySQL性能对比实测:从安装到查询优化的全流程体验 在国产数据库技术快速发展的今天,越来越多的企业开始关注从传统数据库向国产化解决方案的迁移。作为国产数据库中的佼佼者,KingbaseES V9凭借其出色的MySQL兼容性和…...