51交通灯
一、基本原理
利用51单片机控制各个路口红绿灯及时间显示。
设计的重点:
1、各个路口红绿灯亮灭的规则,暂不考虑左转方向;
2、倒计时的实现,利用单片机的定时器进行计数得到秒信号;
3、时间显示:东西南北四个方向的时间一致,当东西方向为60秒绿灯通行时间,同时南北方向为60秒红灯禁止时间,因此硬件连接时可考虑东西南北方向可采用同一接法;最后相当于2个数码管动态显示。
4、按键设置(扩展要求):设置键按一次,设置主干道通信时间(即次干道禁止时间),按第二次,设置主干道禁止时间(即次干道通信时间),按第三次,可作为紧急通信键。设置时间需要确定,可通过确定键实现,也可通过延时确定,如10秒。当然也可根据需要增加相应的按键。
仿真图

注意修改每个灯的管脚,位选管脚等。
#include <REGX52.H>
#define ON 0
#define OFF 1
unsigned char tab[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};
short EW_Time=60,NS_Time=60,EW_SetTime=60,NS_SetTime=60;
unsigned char Time_Mode=0,Flag_Blink=0;
sbit Switch_Time1=P3^3;//数码管位选
sbit Switch_Time2=P3^2;
sbit EW_Red=P2^0; //东西向红灯
sbit EW_Green=P2^3; //东西向绿灯
sbit EW_Yellow=P2^2; //东西向黄灯
sbit NS_Red=P2^5; //南北向红灯
sbit NS_Green=P2^7; //南北向绿灯
sbit NS_Yellow=P2^6; //南北向黄灯
sbit Power=P2^4;void delay_ms(unsigned int ms)//ms延时函数
{unsigned int i,j;for(i=ms;i>0;i--)for(j=110;j>0;j--);}void Timer_Init()//定时器初始化
{TMOD=0x01; //设置为定时器0工作模式1TL0=(65536-50000)%256;//低八位TH0=(65536-50000)/256;//高八位TR0 = 1; //定时器0开始计时EA=1;//开启总中断ET0=1;//开启定时器0中断
}void Nixie(unsigned char Data)//数码管显示
{Switch_Time1=1;Switch_Time2=0;P0=tab[Data%10];//显示个位delay_ms(1);Switch_Time2=1;Switch_Time1=0;P0=tab[Data/10];//显示十位delay_ms(1);
}unsigned char Scan_Key()//获取按键键码
{unsigned char KeyNumber=0;if(P1_0==0){delay_ms(10);while(P1_0==0);delay_ms(10);KeyNumber=1;}if(P1_1==0){delay_ms(10);while(P1_1==0);delay_ms(10);KeyNumber=2;}if(P1_2==0){delay_ms(10);while(P1_2==0);delay_ms(10);KeyNumber=3;}if(P1_3==0){delay_ms(10);while(P1_3==0);delay_ms(10);KeyNumber=4;}if(P1_4==0){delay_ms(10);while(P1_4==0);delay_ms(10);KeyNumber=5;}if(P1_5==0){delay_ms(10);while(P1_5==0);delay_ms(10);KeyNumber=6;}if(P1_6==0){delay_ms(10);while(P1_6==0);delay_ms(10);KeyNumber=7;}if(P1_7==0){delay_ms(10);while(P1_7==0);delay_ms(10);KeyNumber=8;}return KeyNumber;
}void traffic()//红绿灯主要逻辑
{if(Time_Mode==0)//东西南北转换{Nixie(EW_Time);if(EW_Time>5){EW_Red=OFF;//东西红灯灭NS_Yellow=OFF;//南北黄灯灭NS_Green=OFF;//南北绿灯灭EW_Green=ON;//东西绿灯亮NS_Red=ON;//南北红灯亮}else if(Flag_Blink==0&&EW_Time<=5&&EW_Time>0)//闪烁{EW_Green=OFF;//东西绿灯灭EW_Yellow=ON;//东西黄灯亮}else{EW_Green=OFF;//东西绿灯灭EW_Yellow=OFF;//东西黄灯灭}}if(Time_Mode==1)//东西南北转换{Nixie(NS_Time);if(NS_Time>5){NS_Red=OFF;//南北红灯灭EW_Yellow=OFF;//东西黄灯灭EW_Green=OFF;//东西绿灯灭EW_Red=ON;//东西红灯亮NS_Green=ON;//南北绿灯亮}else if(Flag_Blink==0&&NS_Time<=5&&NS_Time>0)//闪烁{NS_Green=OFF;//南北绿灯灭NS_Yellow=ON;//南北黄灯亮}else{NS_Green=OFF;//南北绿灯灭NS_Yellow=OFF;//南北黄灯灭}}
}void Set_Time()
{char Key_Num=0,Key_Value=0,mode=1;while(1){Key_Value=Scan_Key();//获取键值if(Key_Value!=0)Key_Num=Key_Value;if(Key_Num==1){mode++;if(mode>3)break;Key_Num=0;}if(mode==1)//按下第二次显示东西通讯时间,可加减设置{Nixie(EW_SetTime);if(Key_Num==2){EW_SetTime++;Key_Num=0;}if(Key_Num==3){EW_SetTime--;Key_Num=0;}}if(mode==2)//按下第二次显示南北通讯时间,可加减设置{Nixie(NS_SetTime);if(Key_Num==2){NS_SetTime++;Key_Num=0;}if(Key_Num==3){NS_SetTime--;Key_Num=0;}}if(mode==3)//按下第三次时显示00,红灯亮,紧急通行{P2=0xFF;Nixie(0);NS_Red=ON;EW_Red=ON;}if(Key_Num==4)//确认键,上传主副干道通行时间{EW_Time=EW_SetTime;NS_Time=NS_SetTime;break;}}
}
void Yellow_Blink()//黄灯闪烁
{char Key_Num=0,Key_Value=0,Mode=1;while(1){Key_Value=Scan_Key();//获取键值if(Key_Value!=0)Mode=Key_Value;P2=0xFF;Nixie(0);if(Flag_Blink){EW_Yellow=ON;NS_Yellow=ON; }else{EW_Yellow=OFF;NS_Yellow=OFF; }if(Mode==5){break;}}
}void main()
{char Key_Mode=0,Key_Value=0;P2=0xFF;Power=1;Timer_Init();//初始化定时器
// NS_Green=OFF;while(1) { Key_Value=Scan_Key();if(Key_Value!=0)Key_Mode=Key_Value;switch(Key_Mode){case 0:traffic();break;case 1:Set_Time();Key_Mode=0;break;case 5:Yellow_Blink();Key_Mode=0;break;default:Key_Mode=0;}}
}void Timer0() interrupt 1
{static unsigned char count=0,count1=0;TL0=(65536-50000)%256;//低八位TH0=(65536-50000)/256;//高八位if(count>=10){count=0;if(Time_Mode==0)//东西时间减{EW_Time--;if(EW_Time<0){EW_Time=EW_SetTime;Time_Mode=!Time_Mode;}}if(Time_Mode==1)//南北时间减{NS_Time--;if(NS_Time<0){NS_Time=NS_SetTime;Time_Mode=!Time_Mode;}}}if(count1>=5)//闪烁标志位{count1=0;Flag_Blink=!Flag_Blink;}count++;count1++;
}相关文章:
51交通灯
一、基本原理 利用51单片机控制各个路口红绿灯及时间显示。 设计的重点: 1、各个路口红绿灯亮灭的规则,暂不考虑左转方向; 2、倒计时的实现,利用单片机的定时器进行计数得到秒信号; 3、时间显示:东西南…...

鸿蒙Arkts上传图片并获取接口返回信息
需求: 选择相册图片后,将文件上传到服务器,接口会返回图片地址。 问题: 1、鸿蒙自带的文件上传返回值只会返回上传状态,不会返回接口返回信息。 类似问题 HarmonyOS上传文件以及权限授权_harmonyos中axios上传文件…...
简介)
超文本标记语言(HTML)简介
HTML 基础 超文本标记语言(英语:HyperText Markup Language,简称:HTML)是一种用来结构化 Web 网页及其内容的标记语言。网页内容可以是:一组段落、一个重点信息列表、也可以含有图片和数据表。正如标题所示…...

使用thymeleaf直接渲染字符串
目录 一、依赖 二、示例代码 一、依赖 <--JAVA 8--><dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-thymeleaf</artifactId><version>2.7.18</version></dependency><-…...

Spring Boot整合发送QQ邮箱功能
1. 创建Spring Boot项目 使用Spring Initializr(https://start.spring.io/)创建一个新的Spring Boot项目,并添加spring-boot-starter-mail依赖。 2. 添加配置 在application.properties或application.yml文件中添加QQ邮箱的SMTP配置。这里…...

Milvus向量数据库
Milvus 是一个开源的向量数据库,专为处理高维向量数据而设计,常用于大规模向量相似性搜索和基于向量的机器学习应用。它支持高效地管理、搜索和操作嵌入(如文本、图像、音频的特征向量),在推荐系统、图像检索、语义搜索…...

python cls的使用
import threadingclass Test:# new方法用于创建类的实例def __new__(cls, *args, **kwargs):print("__new__:", cls.__class__.__name__)return object.__new__(cls) # 返回实例给init self参数# init用于初始化类的实例,实例由new方法传递过来的…...

idea中maven下载依赖缓慢解决方法
解决IDEA中Maven下载依赖包过慢或报错的问题_maven 下载依赖要很久-CSDN博客...
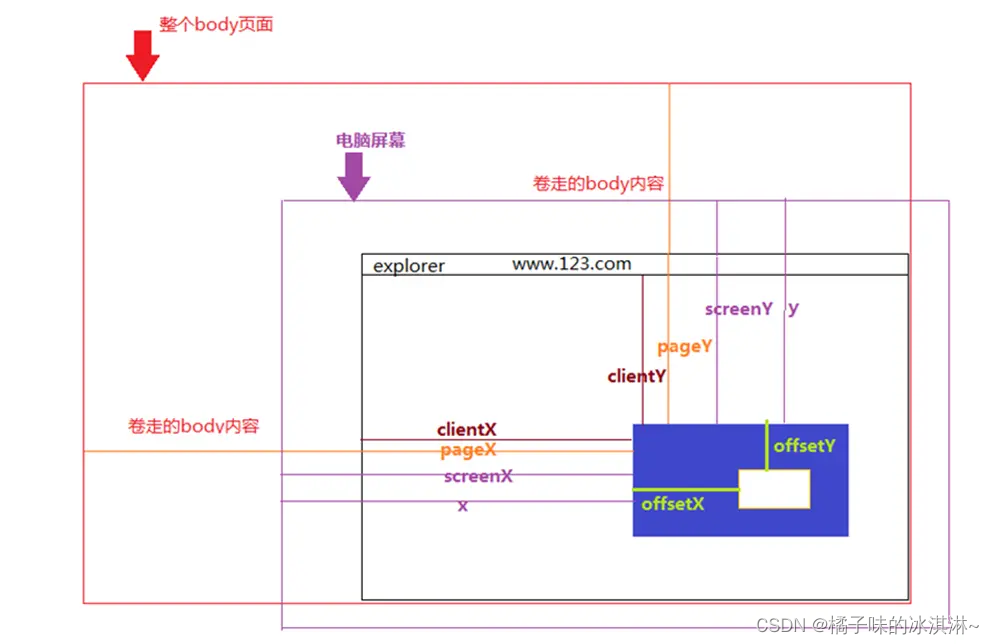
JS 中的各种距离 scrollTop?clientHeight?
元素的各种距离 DOM 对象 属性描述offsetWidth只读,返回元素的宽度(包括元素宽度、内边距和边框,不包括外边距)offsetHeight只读,返回元素的高度(包括元素高度、内边距和边框,不包括外边距&am…...
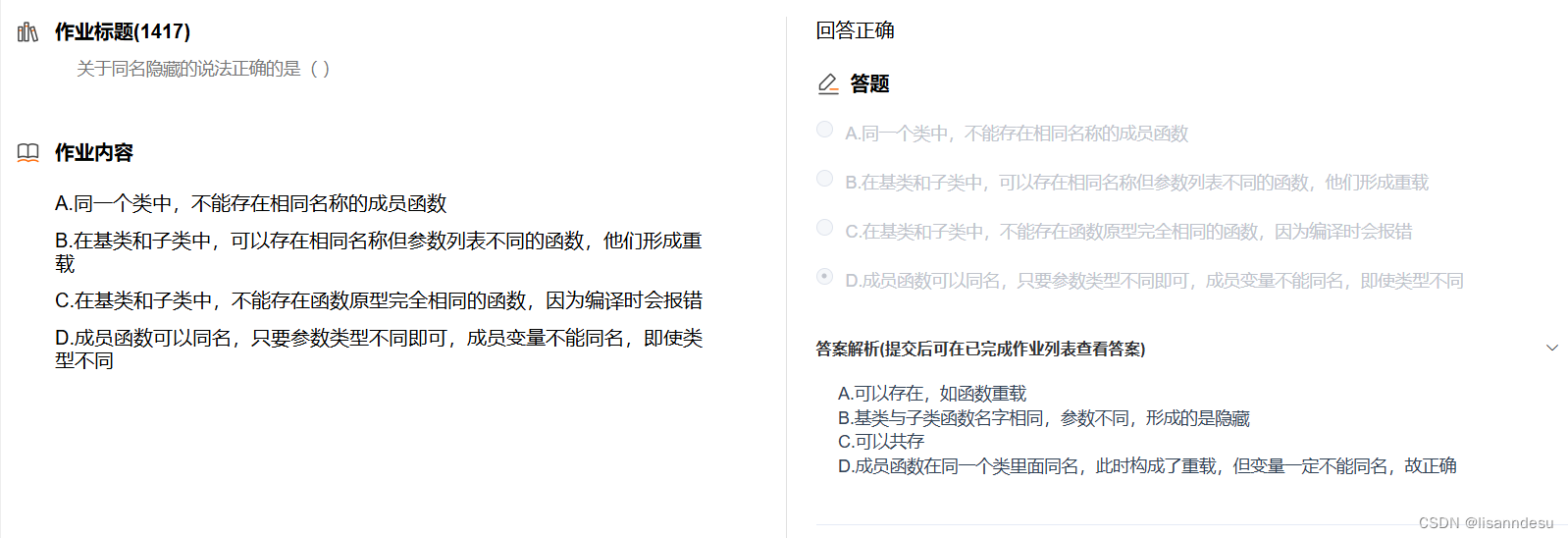
继承-进阶-易错点
子类同名方法隐藏父类方法 即使调用不匹配也不会再去父类寻找,而是直接报错 //下面代码输出结果:( )class A { public:void f(){ cout<<"A::f()"<<endl; }int a; };class B : public A { public:void f(int a){c…...

【图论应用】使用多路图(multigraph)对上海地铁站点图建模,并解决最短路径问题
文章目录 1 前言2 导包导入数据集3 创建多路图,导入节点和边信息3 绘制线路图4 计算最短路径 1 前言 最近正在学习图神经网络,先pick up了一些最基础的图论知识并学习了一些好玩的应用。 本文启发于B站视频(BV1LY411R7HJ)&#…...
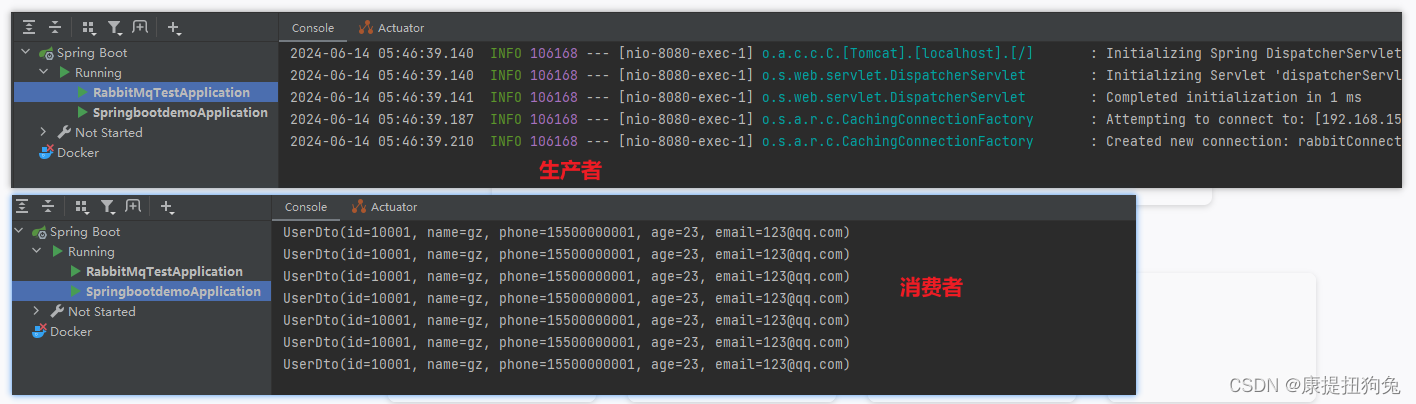
RabbitMQ安装配置,封装工具类,发送消息及监听
1. Get-Started docker安装rabbitmq 拉取镜像 [rootheima ~]# docker pull rabbitmq:3.8-management 3.8-management: Pulling from library/rabbitmq 7b1a6ab2e44d: Pull complete 37f453d83d8f: Pull complete e64e769bc4fd: Pull complete c288a913222f: Pull complet…...

iOS接入Flutter
在现有的iOS项目上接入Flutter,参考链接 第一步:创建flutter项目,即 创建 Flutter module flutter create --template module my_flutter第二步:创建framework,这里选择的是B方式,即 选项 B - 在 Xcode 中…...

【ubuntu】用户添加root权限
添加root用户添加新用户并赋予权限 文件只读,无法更改 rootubuntu-server:/home/ubuntu# vi /etc/sudoers rootubuntu-server:/home/ubuntu# vi /etc/sudoers rootubuntu-server:/home/ubuntu# chmod -R 777 /etc/sudoers rootubuntu-server:/home/ubuntu# vi /et…...

设计通用灵活的LabVIEW自动测试系统
为了在不同客户案例中灵活使用不同设备(如采集卡、Modbus模块)且保持功能一致的LabVIEW自动测试系统,需要采用模块化的软件架构、配置文件管理、标准化接口和良好的升级维护策略。本文从软件架构、模块化设计、配置管理、升级维护、代码管理和…...
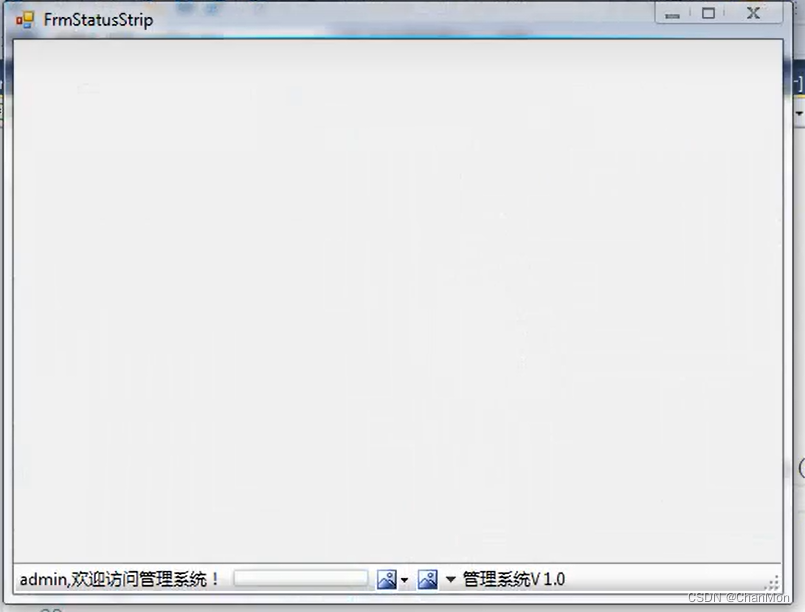
C# WinForm —— 35 StatusStrip 介绍
1. 简介 状态栏 StatusStrip,默认在软件的最下方,用于显示系统时间、版本、进度条、账号、角色信息、操作位置信息等 可以在状态栏中添加的控件类型有:StatusLabel、ProgressBar、DropDownButton、SplitButton 2. 属性 属性解释(Name)控…...
如何应对生活中的不确定性:仁者安仁,知者利仁。
有较高自尊水平的人,接近于孔子说的:仁者。 ——— 有着稳定的高自尊,无论外在环境如何变化,对其影响都不大,他能够愉快地生活。 相反:一个人处于低自尊状态,就会活得很痛苦,对自己…...

C#面:请解释C#接口的显式实现有什么意义
C#接口的显式实现是指在实现接口成员时,使用接口名称进行限定的方式。这种方式可以在一个类中实现多个接口,并且可以避免接口成员之间的命名冲突。显式实现接口的成员只能通过接口类型来访问,而不能通过类的实例来访问。 显式实现接口的主要…...

STM32项目分享:智能窗帘系统
目录 一、前言 二、项目简介 1.功能详解 2.主要器件 三、原理图设计 四、PCB硬件设计 1.PCB图 2.PCB板打样焊接图 五、程序设计 六、实验效果 七、资料内容 项目分享 一、前言 项目成品图片: 哔哩哔哩视频链接: https://www.bilibili.c…...
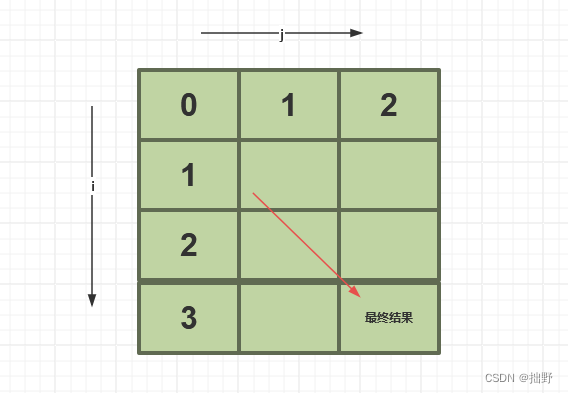
【算法-力扣】72. 编辑距离(动态规划)
目录 一、题目描述 二、解题思路 三、参考答案 一、题目描述 编辑距离 给你两个单词 word1 和 word2, 请返回将 word1 转换成 word2 所使用的最少操作数 。 你可以对一个单词进行如下三种操作: 插入一个字符 删除一个字符 替换一个字符 示例 1&#…...

Verilog行为级描述:从语法到硬件映射的工程实践指南
1. 项目概述:从“是什么”到“为什么”如果你刚开始接触数字电路设计,或者正准备从VHDL转向Verilog,那么“行为级描述”这个词可能会让你既兴奋又困惑。兴奋在于,它听起来比“门级网表”或“RTL(寄存器传输级ÿ…...

华硕笔记本终极优化神器:GHelper完整使用教程
华硕笔记本终极优化神器:GHelper完整使用教程 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zenbook, Expertbook…...

如何用 curl 命令快速测试 Taotoken 的 API 是否连通
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 如何用 curl 命令快速测试 Taotoken 的 API 是否连通 在接入大模型服务时,直接使用 curl 命令测试 API 是最基础、最直…...

DIY蓝牙街机摇杆:从零打造无线复古游戏控制器
1. 项目概述与核心思路作为一个玩了二十多年街机,也折腾了十几年硬件的“老炮儿”,我始终觉得,有些东西的味道是数字模拟不出来的。比如,用键盘或现代手柄玩《拳皇97》或《合金弹头》,总觉得少了点灵魂——那“咔哒咔哒…...

Office RibbonX Editor:免费开源Office界面定制终极指南
Office RibbonX Editor:免费开源Office界面定制终极指南 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbonx-edit…...

WeChatMsg:5分钟轻松掌握微信聊天记录的终极管理方案
WeChatMsg:5分钟轻松掌握微信聊天记录的终极管理方案 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/WeChat…...

如何高效下载Steam创意工坊模组:WorkshopDL开源工具完整指南
如何高效下载Steam创意工坊模组:WorkshopDL开源工具完整指南 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 还在为Steam创意工坊模组下载而烦恼吗?无论…...

NHSE动物森友会存档编辑器完整指南:打造梦想岛屿的终极工具
NHSE动物森友会存档编辑器完整指南:打造梦想岛屿的终极工具 【免费下载链接】NHSE Animal Crossing: New Horizons save editor 项目地址: https://gitcode.com/gh_mirrors/nh/NHSE 还在为《集合啦!动物森友会》中收集稀有物品而烦恼吗࿱…...

解密Java静态调用图:架构师的高效分析实战
解密Java静态调用图:架构师的高效分析实战 【免费下载链接】java-callgraph2 Programs for producing static call graphs for Java programs. 项目地址: https://gitcode.com/gh_mirrors/ja/java-callgraph2 你是否曾面对一个庞大的Java项目,想要…...

md-wechat:让Markdown完美兼容微信公众号排版的工具实战
1. 项目概述:一个让Markdown在微信生态里“活”起来的工具如果你和我一样,是个重度Markdown爱好者,同时又需要在微信生态里频繁地分享技术文档、产品说明或者个人笔记,那你一定体会过那种割裂感。在Typora或VS Code里写得行云流水…...