yolov10 学习笔记
目录
推理代码,source可以是文件名,路径,
预测可视化:
预测可视化加nms
训练自己的数据集,
训练一段时间报错:dill库
解决方法:
推理代码,source可以是文件名,路径,
保存结果:
from ultralytics import YOLOv10# model = YOLOv10.from_pretrained('jameslahm/yolov10{n/s/m/b/l/x}')
# or
# wget https://github.com/THU-MIG/yolov10/releases/download/v1.1/yolov10{n/s/m/b/l/x}.pt
model = YOLOv10('yolov10s.pt')# model.val(data='coco.yaml', batch=256)source = 'http://images.cocodataset.org/val2017/000000039769.jpg'
source = 'F:\data\qijun\dao\pics_re_1'
model.predict(source=source, save=True)预测可视化:
import cv2
import time
# import torch
from ultralytics import YOLOv10cv2.namedWindow('window', cv2.WINDOW_NORMAL)
cv2.resizeWindow('window', 640, 480)model = YOLOv10('yolov10s.pt')# 打开摄像头
cap = cv2.VideoCapture(0)# 检查摄像头是否打开
if not cap.isOpened():print("无法打开摄像头")exit()# 获取视频帧的宽度和高度
width = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
height = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
print(width, height)# 计时器和FPS初始化
prev_time = 0
fps = 0while True:# 读取帧ret, frame = cap.read()if not ret:print("无法读取帧")break# 改变输入图像尺寸,加快推理速度# frame = cv2.resize(frame, (width // 4, height // 4))# frame = cv2.resize(frame,(128,128) )prev_time = time.time()# 将帧传递给模型进行预测,并明确指定使用CPUresults = model(frame, device='0')curr_time = time.time()# 获取预测结果并绘制在帧上for result in results:boxes = result.boxes.xyxy.cpu().numpy()confidences = result.boxes.conf.cpu().numpy()class_ids = result.boxes.cls.cpu().numpy().astype(int)for i in range(len(boxes)):box = boxes[i]x1, y1, x2, y2 = map(int, box[:4])confidence = confidences[i]class_id = class_ids[i]label = result.names[class_id]cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)cv2.putText(frame, f'{label} {confidence:.2f}', (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (36, 255, 12), 1)fps = (curr_time - prev_time)cv2.putText(frame, f'FPS: {fps:.2f}', (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1)cv2.imshow('window', frame)if cv2.waitKey(1) & 0xFF == ord('q'):break# 释放摄像头并关闭窗口
cap.release()
cv2.destroyAllWindows()预测可视化加nms
import cv2
import timeimport numpy as np
import torchfrom img_reader import ImgReader
# import torch
from ultralytics import YOLOv10# cv2.namedWindow('window', cv2.WINDOW_NORMAL)
# cv2.resizeWindow('window', 640, 480)# model = YOLOv10('yolov10s.pt')
model = YOLOv10('runs/train/exp2/weights/best.pt')# 计时器和FPS初始化
prev_time = 0
fps = 0f_type='img'
source = r'B:\project\qijun\data\dataSet-coins\images\train'# file_reader = ImgReader(source, f_type=f_type)f_type='cam'
source=0
f_type='mp4'
source = r"B:\project\qijun\data\test\shuiguo1.mp4"
file_reader = ImgReader(source, f_type=f_type)for img_i in range(file_reader.total_frames):img_o, img_index, img_file = file_reader.get_img()if max(img_o.shape[:2]) > 1500:x_scale = 1500 / max(img_o.shape[:2])img_o = cv2.resize(img_o, None, fx=x_scale, fy=x_scale, interpolation=cv2.INTER_AREA)img=img_oframe=img_o.copy()if img_file is not None:print(img_file)# 改变输入图像尺寸,加快推理速度# frame = cv2.resize(frame, (width // 4, height // 4))# frame = cv2.resize(frame,(128,128) )prev_time = time.time()# 将帧传递给模型进行预测,并明确指定使用CPUresults = model(frame, device='0')curr_time = time.time()# 获取预测结果并绘制在帧上for result in results:boxes = result.boxes.xyxy.cpu().numpy()confidences = result.boxes.conf.cpu().numpy()class_ids = result.boxes.cls.cpu().numpy().astype(int)for i in range(len(boxes)):box = boxes[i]x1, y1, x2, y2 = map(int, box[:4])confidence = confidences[i]class_id = class_ids[i]label = result.names[class_id]cv2.rectangle(img, (x1, y1), (x2, y2), (0, 0, 255), 3)# cv2.putText(img, f'{label} {confidence:.2f}', (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (36, 255, 12), 1)final_boxes = []final_confidences = []final_class_ids = []# 对每个类别单独进行NMSunique_classes = set(class_ids)for cls in unique_classes:cls_indices = (class_ids == cls)# 提取当前类别的boxes, confidencesboxes_cls = torch.tensor(boxes[cls_indices])confidences_cls = torch.tensor(confidences[cls_indices])# 对当前类别进行NMSkeep_indices = torch.ops.torchvision.nms(boxes_cls, confidences_cls, iou_threshold=0.5) # 设置你的IoU阈值num_filtered = len(boxes_cls) - len(keep_indices)if num_filtered>0:print(f"Class {cls}: {num_filtered} boxes filtered out by NMS")# 过滤当前类别的boxes, confidences, class_idsfinal_boxes.append(boxes_cls[keep_indices].numpy())final_confidences.append(confidences_cls[keep_indices].numpy())final_class_ids.append([cls] * len(keep_indices))# 合并所有类别的结果final_boxes = np.concatenate(final_boxes, axis=0)final_confidences = np.concatenate(final_confidences, axis=0)final_class_ids = np.concatenate(final_class_ids, axis=0)for i in range(len(final_boxes)):box = final_boxes[i]x1, y1, x2, y2 = map(int, box[:4])confidence = final_confidences[i]class_id = final_class_ids[i]label = result.names[class_id]cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2)cv2.putText(img, f'{label} {confidence:.2f}', (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (36, 255, 12), 1)# for result in results:# boxes = result.boxes.xyxy.cpu().numpy()# confidences = result.boxes.conf.cpu().numpy()# class_ids = result.boxes.cls.cpu().numpy().astype(int)## for i in range(len(boxes)):# box = boxes[i]# x1, y1, x2, y2 = map(int, box[:4])# confidence = confidences[i]# class_id = class_ids[i]# label = result.names[class_id]# cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2)# cv2.putText(img, f'{label} {confidence:.2f}', (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (36, 255, 12), 1)fps = (curr_time - prev_time)cv2.putText(img, f'{img_i} FPS: {fps:.2f}', (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1)cv2.imshow('window', img)waitkey=0if f_type == 'cam':waitkey=2if cv2.waitKey(waitkey) & 0xFF == ord('q'):break训练自己的数据集,
原版标签是txt格式
我下载了完整代码,自己修改数据集
https://download.csdn.net/download/qq_38408785/89356134
from ultralytics import YOLOv10if __name__ == '__main__':model = YOLOv10('ultralytics/cfg/models/v10/yolov10n.yaml')model.load('yolov10n.pt') # loading pretrain weightsmodel.train(data='data/NEU-DET.yaml',cache=False,imgsz=640,epochs=200,batch=16,close_mosaic=10,device='0',optimizer='SGD', # using SGDproject='runs/train',name='exp',)
训练一段时间报错:dill库
File "D:\ProgramData\miniconda3\envs\py310\lib\pickle.py", line 603, in saveself.save_reduce(obj=obj, *rv)File "D:\ProgramData\miniconda3\envs\py310\lib\pickle.py", line 717, in save_reducesave(state)File "D:\ProgramData\miniconda3\envs\py310\lib\site-packages\dill\_dill.py", line 388, in saveStockPickler.save(self, obj, save_persistent_id)File "D:\ProgramData\miniconda3\envs\py310\lib\pickle.py", line 560, in savef(self, obj) # Call unbound method with explicit selfFile "D:\ProgramData\miniconda3\envs\py310\lib\site-packages\dill\_dill.py", line 1186, in save_module_dictStockPickler.save_dict(pickler, obj)File "D:\ProgramData\miniconda3\envs\py310\lib\pickle.py", line 972, in save_dictself._batch_setitems(obj.items())File "D:\ProgramData\miniconda3\envs\py310\lib\pickle.py", line 997, in _batch_setitemssave(k)File "D:\ProgramData\miniconda3\envs\py310\lib\site-packages\dill\_dill.py", line 388, in saveStockPickler.save(self, obj, save_persistent_id)File "D:\ProgramData\miniconda3\envs\py310\lib\pickle.py", line 539, in savepid = self.persistent_id(obj)File "D:\ProgramData\miniconda3\envs\py310\lib\site-packages\torch\serialization.py", line 622, in persistent_idstorage_type = normalize_storage_type(type(obj))File "D:\ProgramData\miniconda3\envs\py310\lib\site-packages\torch\serialization.py", line 226, in normalize_storage_typereturn getattr(torch, storage_type.__name__)
AttributeError: module 'torch' has no attribute 'str'解决方法:
pip install dill -U
升级为dill-0.3.8 后报错没有了。
相关文章:

yolov10 学习笔记
目录 推理代码,source可以是文件名,路径, 预测可视化: 预测可视化加nms 训练自己的数据集, 训练一段时间报错:dill库 解决方法: 推理代码,source可以是文件名,路径…...

NAT概述
NAT概念 NAT(Network Address Translation,网络地址转换)是一种用于修改网络地址信息的技术,主要用于在路由器或防火墙上进行地址转换,以解决 IPv4 地址短缺问题、提高网络安全性以及实现私有网络与公有网络之间的通信…...
Ansys Mechanical|学习方法
Ansys Mechanical是Ansys的旗舰产品之一,涉及的学科体系全面丰富,包括的力学分支主要有理论力学,振动理论,连续介质力学,固态力学,物理力学,爆炸力学及应用力学等。 在自媒体及数字经济飞速发展…...

热门开源项目ChatTTS: 国内语音技术突破,实现弯道超车
✨✨ 欢迎大家来访Srlua的博文(づ ̄3 ̄)づ╭❤~✨✨ 🌟🌟 欢迎各位亲爱的读者,感谢你们抽出宝贵的时间来阅读我的文章。 我是Srlua小谢,在这里我会分享我的知识和经验。&am…...

环形链表2证明
解法 快慢指针相遇后,其中一个指回头部,然后同步前进 代码 /*** Definition for singly-linked list.* struct ListNode {* int val;* ListNode *next;* ListNode(int x) : val(x), next(NULL) {}* };*/ class Solution { public:ListNod…...
fetch_lfw_people()报错urllib.error.HTTPError: HTTP Error 403: Forbidden的解决方案
零、实验报告地址 计算机视觉实验二:基于支持向量机和随机森林的分类(Part one: 编程实现基于支持向量机的人脸识别分类 )-CSDN博客 一、代码报错 fetch_lfw_people()报错urllib.error.HTTPError: HTTP Error 403: Forbidden 二、报错原因 通常是由于访问权限不足导致的…...

Verilog-Behavior Level 和 RTL Level 和 GATE Level的区别
硬件设计中对硬件的描述可以具有不同的抽象级别,以Verilog为例: Behavior Level。描述的是硬件的行为,当我们在看到如下关键字时就是行为级别的代码:#,wait,while,force,release等&…...

华为OD机考题HJ1 字符串最后一个单词的长度
前言 描述 计算字符串最后一个单词的长度,单词以空格隔开,字符串长度小于5000。(注:字符串末尾不以空格为结尾) 输入描述: 输入一行,代表要计算的字符串,非空,长度小…...
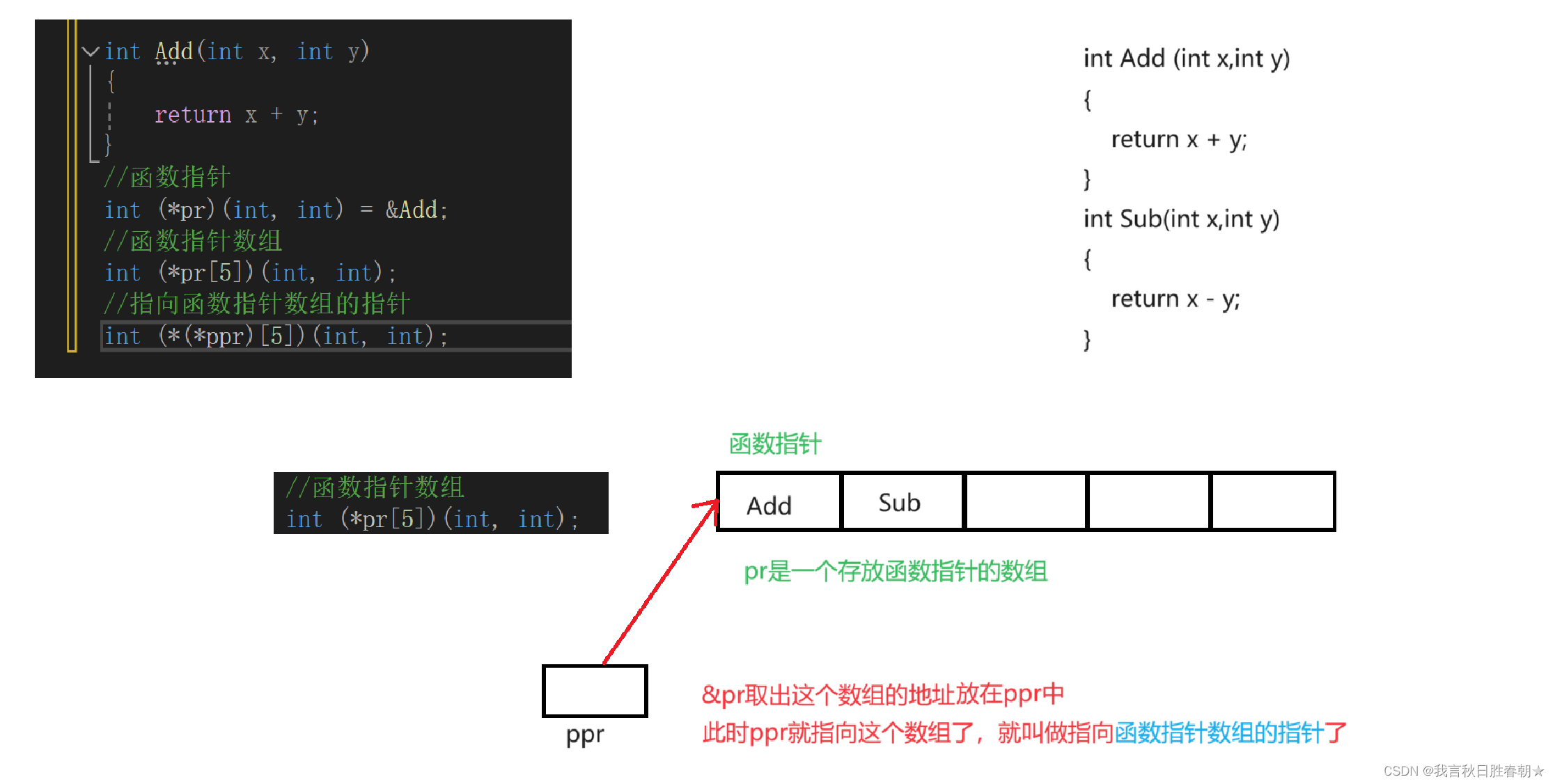
C语言---------深入理解指针
目录 一、字符指针 二、指针数组: 三、数组指针: 1、定义: 2、&数组名和数组名区别: 3、数组指针的使用: 四、数组参数,指针参数: 1、一维数组传参: 2、二维数组传参&am…...

C++ 算法教程
归并排序 #include<iostream> using namespace std; template <class T> void Merge(T data[],int start,int mid,int end) {int len1 mid - start 1, len2 end - mid;int i, j, k;T* left new int[len1];T* right new int[len2];for (i 0; i < len1; i)…...
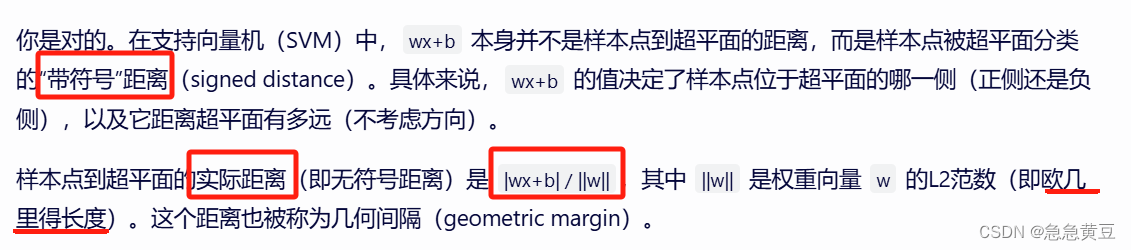
【支持向量机】问题梳理
学完支持向量机后我有些地方不太清楚,故做如下梳理: 1.为什么支持向量机模型认为一个点划分正确的标志是y(wxb)>1呢,为什么不是y(wxb)>0,比如y为1,wxb为0.5,大于0,则预测正确。 2.所以意思…...
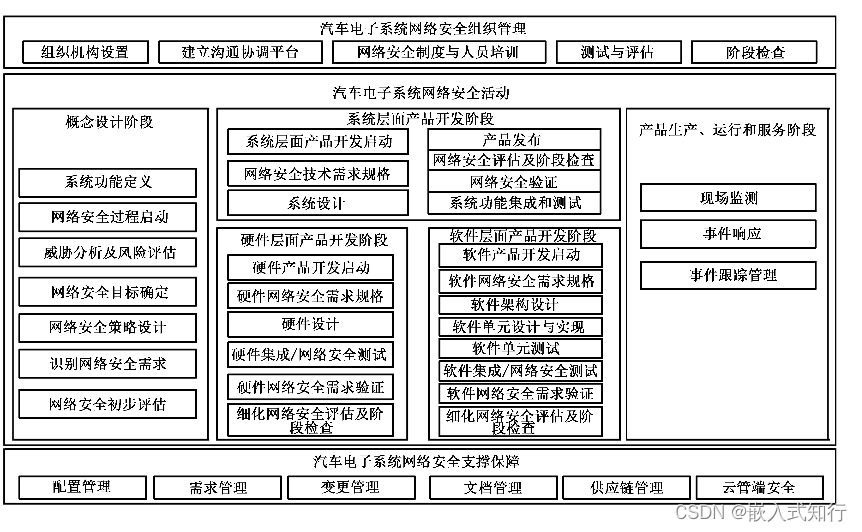
车载网络安全指南 网络安全框架(二)
返回总目录->返回总目录<- 目录 一、概述 二、网络安全组织管理 三、网络安全活动 四、支撑保障 一、概述 汽车电子系统网络安全活动框架包含汽车电子系统网络安全活动、组织管理以及支持保障。其中,网络安全管理活动是框架的核心,主要指汽车电子系统生命周期各阶段…...
元数据、数据元、数据字典、数据模型及元模型的区别详解
在数据管理和分析领域,有许多相似的概念,如元数据、数据元、数据字典、数据模型和元模型。这些概念的定义和应用往往容易混淆。 数据元 数据元是通过一系列属性描述的数据单元,包括定义、标识、表示以及允许值等。这些属性帮助我们理解和使用…...

【百度智能体】零代码创建职场高情商话术助手智能体
一、前言 作为一个程序猿,工科男思维,走上职场后,总会觉得自己不会处理人际关系,容易背锅说错话,这时候如果有个助手能够时时刻刻提醒自己该如何说话如何做事情就好了。 而我们现在可以通过百度文心智能体平台构建各…...
实战项目: 负载均衡
0. 前言 这个项目使用了前后端,实现一个丐版的LeetCode刷题网站,并根据每台主机的实际情况,选择对应的主机,负载均衡的调度 0.1 所用技术与开发环境 所用技术: C STL 标准库 Boost 准标准库 ( 字符串切割 ) cpp- httplib 第三方开源网络库 ctemplate 第三方开源前端网…...

运维监控系统
做监控系统集成,持续更新ing 1.Prometheus k8s安装prometheusdocker部署prometheusthanos实现prometheus高可用部署 2.Grafana docker安装grafanagrafana的admin密码忘记了grafana使用mysql远程存储 3.Alertmanager 4.Consul 5.夜莺系统 6.时序数据库 6.1 …...
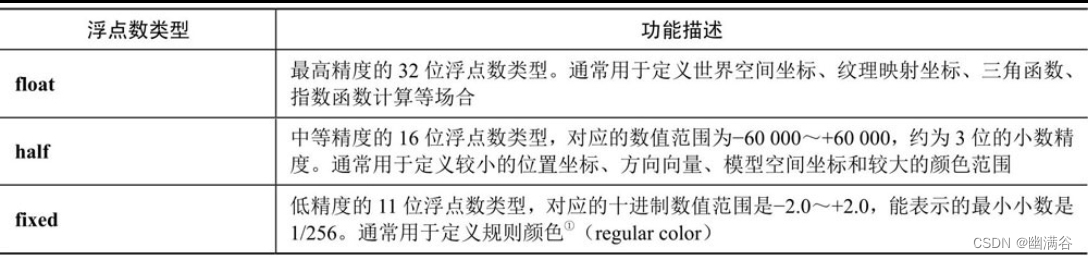
第3章 Unity 3D着色器系统
3.1 从一个外观着色器程序谈起 新建名为basic_diffuse.shader的文件,被一个名为basic_diffuse.mat的材质文件所引用,而basic_diffuse.mat文件则被场景中名为Sphere的game object的MeshRenderer组件所使用。 basic_diffuse.shader代码文件的内容如下所示…...
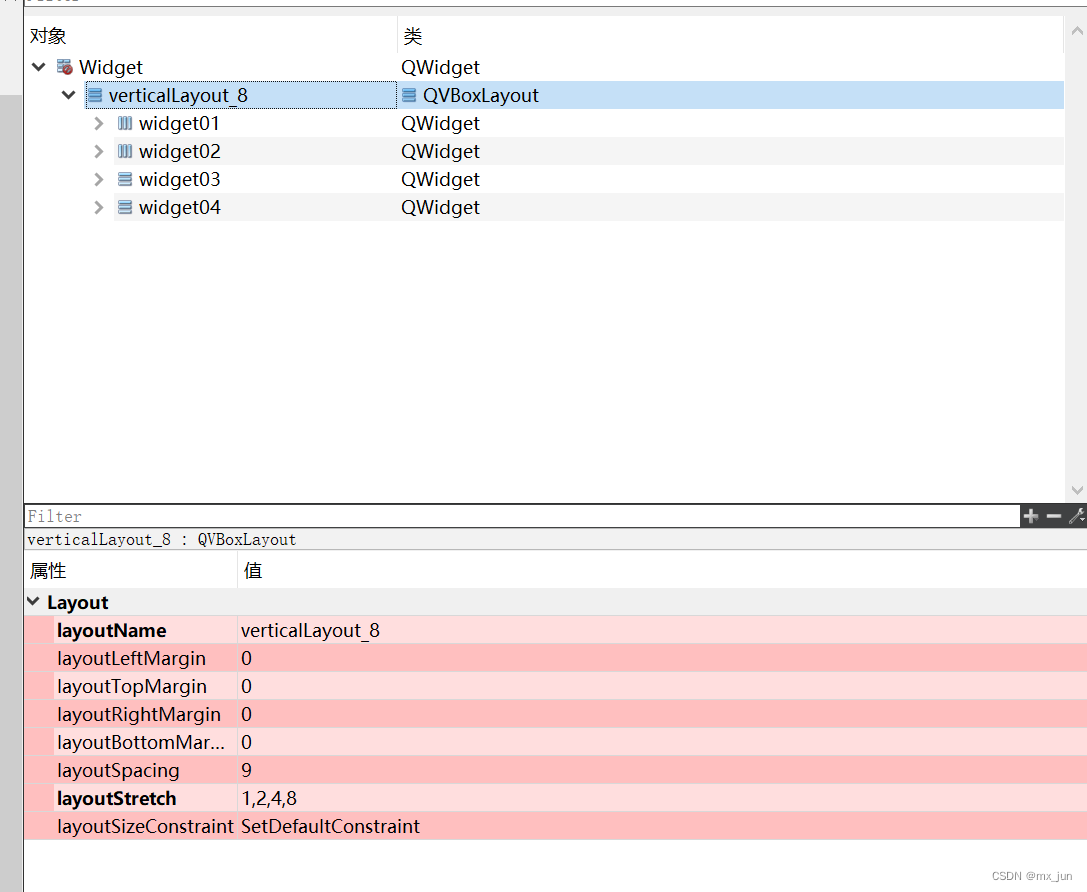
Qt项目天气预报(1) - ui界面搭建
ui中部 效果演示 ui效果 显示效果 控件列表 配合右图查看 居中对齐-label 设置label居中对齐(别傻傻的空格对齐了) 间距配置 widget03 外围的widget对象: 包含label 和 widget0301,如下图 widget0301 内围的widget对象,如下图 样式表 widget03 …...
)
一、从C语言到C++(一)
一、从C语言到C(一) C介绍C语言和C的联系C介绍 头文件命名空间定义命名空间使用命名空间中的名称使用using声明或指令命名空间与C语言的对比给命名空间起别名注意事项std 标准输入输出std::endl使用std::cout进行输出使用std::cin进行输入格式化输出 C介…...

MySQL(5)
聚合函数 GROUP BY 的使用 需求:查询各个部门的平均工资,最高工资SELECT department_id,AVG(salary),SUM(salary)FROM employeesGROUP BY department_id;需求:查询各个job_id的平均工资SELECT job_id,AVG(salary)FROM employeesGROUP BY jo…...
实战对比:我们团队为什么最终选了它?)
Davinci vs. 其他开源BI工具(Superset/Metabase)实战对比:我们团队为什么最终选了它?
Davinci vs. 其他开源BI工具实战对比:技术选型的深度思考 在数据驱动决策的时代,企业级BI工具的选择直接影响着数据分析的效率和深度。当我们团队面临开源BI工具选型时,Davinci、Apache Superset和Metabase成为了主要候选对象。经过三个月的实…...
)
Sora 2训练Pipeline为何突然兼容Gaussian Splatting?:逆向解析OpenAI最新隐式-显式混合表征专利(US20240177892A1)
更多请点击: https://intelliparadigm.com 第一章:Sora 2 Gaussian Splatting 技术融合背景 Sora 2 作为 OpenAI 推出的下一代视频生成模型,已深度集成高斯点绘(Gaussian Splatting)技术以提升动态场景的几何保真度…...

挖掘MCU硬件加速潜力:以R80515的Double DPTR和MDU为例,在Keil C51中开启性能外挂
挖掘MCU硬件加速潜力:R80515双DPTR与MDU在Keil C51中的实战优化 当你在Keil C51环境下为资源受限的8051架构编写代码时,是否曾为缓慢的数据搬运和复杂的数学运算而头疼?现代增强型8051内核如R80515通过硬件加速单元提供了突破性能瓶颈的可能…...

CANN/asc-devkit矢量取倒数API
asc_rcp 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode.com/ca…...

售价99美元小工具Cricut Joy 2,功能实用但新手引导待改进!
产品初印象这款售价99美元的小工具并不完美,但它的功能和应用程序提供的模板正是用户所需要的。照顾他人、自我批评以及心理健康方面的困扰,让用户很难再像过去那样摆弄和涂鸦,然而Cricut Joy 2却让人心动不已。当有创作的心情时,…...

带fp8激活量化的RMSNorm算子手撕
rms_norm_fp8_noweight_fp16:计算流程与优化 完整代码 void rms_norm_fp8_noweight_fp16(const __half *x, __nv_fp8_e4m3 *out,int seq_len, int dim, const float *d_scale,cudaStream_t stream) {rms_norm_fp8_noweight_kernel<<<seq_len, 256, 0, stream>&g…...
)
ROS Melodic下,用Gazebo+ros_control搞定移动底盘+三轴机械臂的联合仿真(附避坑记录)
ROS Melodic下移动底盘与三轴机械臂的Gazebo联合仿真实战指南 当移动底盘遇上机械臂,问题总是比想象中多。上周深夜调试时,我的机械臂突然在Gazebo里表演起了"陀螺旋转",而底盘却纹丝不动——这恰恰是ros_control配置中一个PID参数…...

如何在5分钟内完成BepInEx安装:游戏插件框架终极指南
如何在5分钟内完成BepInEx安装:游戏插件框架终极指南 【免费下载链接】BepInEx Unity / XNA game patcher and plugin framework 项目地址: https://gitcode.com/GitHub_Trending/be/BepInEx BepInEx是一款功能强大的游戏插件框架,专为Unity Mono…...

117.YOLOv5/v8数学原理+CSPDarknet架构,CUDA117环境一键部署
摘要 YOLO(You Only Look Once)系列算法是目标检测领域最主流的实时检测框架,其核心思想是将目标检测任务转化为一个端到端的回归问题。 本文从数学原理出发,系统阐述YOLOv5/v8的架构演进与核心机制,并提供一个从数据准备、模型训练到ONNX部署的完整可运行案例。 文章所有…...
)
别再纠结剪胀角了!用Abaqus CAE五分钟搞定库伦摩尔模型的材料卡设置(含黏土/砂土参数模板)
别再纠结剪胀角了!用Abaqus CAE五分钟搞定库伦摩尔模型的材料卡设置(含黏土/砂土参数模板) 岩土工程仿真中,材料参数设置往往是新手的第一道门槛。当你在Abaqus中面对十几个输入框时,是否也曾困惑:摩擦角和…...