PCA 在图像分析上的应用
同一物体旋转角度求取
直接上代码:
import cv2, os
import numpy as np
import timedef perform_pca(image, num_components):# 将图像转换为浮点型img_float = np.float32(image)img_flatten = img_float.reshape(-1, 2)# 计算均值和协方差矩阵mean, eigenvectors = cv2.PCACompute(img_flatten, mean=None, maxComponents=num_components)return mean, eigenvectorsdef rotate_coords(coords, theta):"""绕原点旋转坐标点集。参数:coords: 坐标点集,每个元素是一个(x, y)的元组。theta: 旋转角度,以弧度为单位。返回:旋转后的坐标点集。"""# 定义旋转矩阵rotation_matrix = np.array([[np.cos(theta), -np.sin(theta)],[np.sin(theta), np.cos(theta)]])# 将坐标点集转换为NumPy数组以便进行矩阵运算coords_array = np.array(coords)# 应用旋转矩阵rotated_coords = np.dot(coords_array, rotation_matrix)return rotated_coordsdef judge_direction1(mean, vector, center_x, center_y):v = np.array([center_x - mean[0][0], center_y - mean[0][1]])if np.dot(v, vector) < 0:vector = -vectorreturn vectordef judge_direction2(mean, vector, image, img_path):edge_image = cv2.Canny(image, 50, 200)file_name = img_path.split("/")[-1]save_path = "/home/xxx/下载/mask/result/"x_angle = vector_angle(vector,np.array([1, 0]))edge_non_zero_coords = cv2.findNonZero(edge_image)edge_non_zero_coords = edge_non_zero_coords - mean[0]edge_non_zero_coords = rotate_coords(edge_non_zero_coords, np.radians(x_angle))min_x, min_y = np.min(edge_non_zero_coords, axis=0)[0]max_x, max_y = np.max(edge_non_zero_coords, axis=0)[0]new_image = np.zeros((int(max_y-min_y)+1, int(max_x - min_x)+1), np.uint8)for coord in edge_non_zero_coords:x, y = coord[0]new_image[int(y - min_y), int(x - min_x)] = 255# cv2.imwrite(save_path + file_name, new_image)if max_x - min_x > max_y - min_y:if abs(max_x) > abs(min_x):vector = -vectorelse:if abs(max_y) > abs(min_y):vector = -vectorreturn vectordef get_vector(img_path):image = cv2.imread(img_path, cv2.IMREAD_GRAYSCALE)h, w = image.shapecenter_x = int(w / 2)center_y = int(h / 2)non_zero_coords = cv2.findNonZero(image)# 执行PCAnum_components = 2mean, eigenvectors = perform_pca(non_zero_coords, num_components)vector = eigenvectors[0]vector = judge_direction2(mean, vector, image, img_path)return vectordef vector_angle(v1, v2):# 计算点积dot_product = np.dot(v1, v2)# 计算向量的模norm_v1 = np.linalg.norm(v1)norm_v2 = np.linalg.norm(v2)# 计算余弦值cos_theta = dot_product / (norm_v1 * norm_v2)# 计算弧度制的夹角theta_rad = np.arccos(np.clip(cos_theta, -1.0, 1.0))# 将弧度制转换为角度制theta_deg = np.degrees(theta_rad)# 确定角度的方向性cross_product = np.cross(v1, v2)if cross_product < 0:theta_deg = 360 - theta_degreturn 360 - theta_degdef get_angle(img_path1, img_path2):vector1 = get_vector(img_path1)vector2 = get_vector(img_path2)angle = vector_angle(vector1, vector2)print(vector1, vector2, angle)return angleif __name__ == "__main__":img_path1 = "/home/xxx/下载/mask/mask3/0.jpg"img_path2 = "/home/xxx/下载/mask/mask3/32.jpg"get_angle(img_path1, img_path2)相关文章:

PCA 在图像分析上的应用
同一物体旋转角度求取 直接上代码: import cv2, os import numpy as np import timedef perform_pca(image, num_components):# 将图像转换为浮点型img_float np.float32(image)img_flatten img_float.reshape(-1, 2)# 计算均值和协方差矩阵mean, eigenvectors …...
springboot项目mapper无法自动装配,未找到 ‘userMapper‘ 类型的Bean解决办法.
一开始我看到了这个回答:springboot项目mapper无法自动装配,未找到 ‘userMapper‘ 类型的 Bean解决办法(含报错原因)_无法自动装配。找不到 usermapper 类型的 bean。-CSDN博客 mapper无法自动装配,未找到 ‘userMap…...
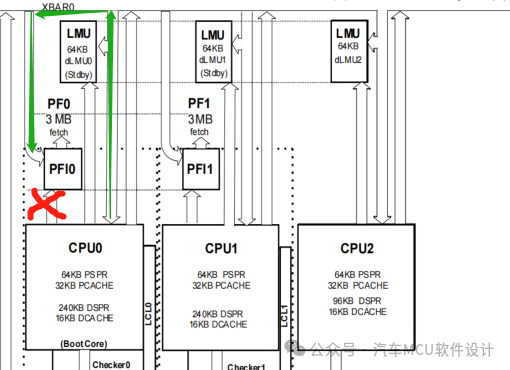
TC3xx A\B SWAP机制的小细节(2)
目录 1.引入 2.TC3xx Swap机制小细节 3.小结 1.引入 上文TC3xx A\B SWAP机制的小细节(1)-CSDN博客主要把OTA的概念,以及MCU的硬件A\B Swap机制做了简单介绍,下面我们来聊聊TC3xx的SWAP机制 2.TC3xx Swap机制小细节 英飞凌TC3xx提供了硬件SOTA机制&…...
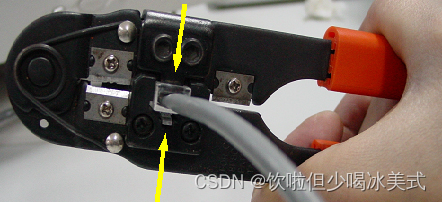
双绞线(网线)的制作与测试
实验目的 1、熟悉常用双绞线(网线)及其制作工具的使用; 2、掌握非屏蔽双绞线的直通线、交叉线的制作及连接方法; 3、掌握双绞线连通性的测试。 设备要求:RJ45压线钳,RJ45水晶头,UTP线缆&…...

高效处理海量慢SQL日志文件:Java与JSQLParser去重方案详解
在大数据处理环境下,慢SQL日志优化是一个必要的步骤,尤其当日志文件达到数GB时,直接操作日志文件会带来诸多不便。本文将介绍如何通过Java和JSQLParser库来解析和去重慢SQL日志,以提高性能和可维护性。 背景 公司生产环境中&…...

企业内部、与合作伙伴/客户文档协作如何高效安全地收集资料?
在企业的日常运营与对外合作中,「文件收集」是一项特别常见的文档协作需求。例如,公司举办项目经验分享大会,组织者需要提前收集演讲者的材料;新项目启动时,项目经理需要快速收集技术方案和报价方案以便招投标和商务活…...

用Unity创造自己的绿洲
“谢谢你能玩我的游戏!” 希望将来我也能做出一款影响全世界的游戏,就比如现在的《英雄联盟》,或是电影里的《绿洲》!然后也说出这么一句话:谢谢你能玩我的游戏! 阶段性的总结一下 那就展示一下最近完成的…...
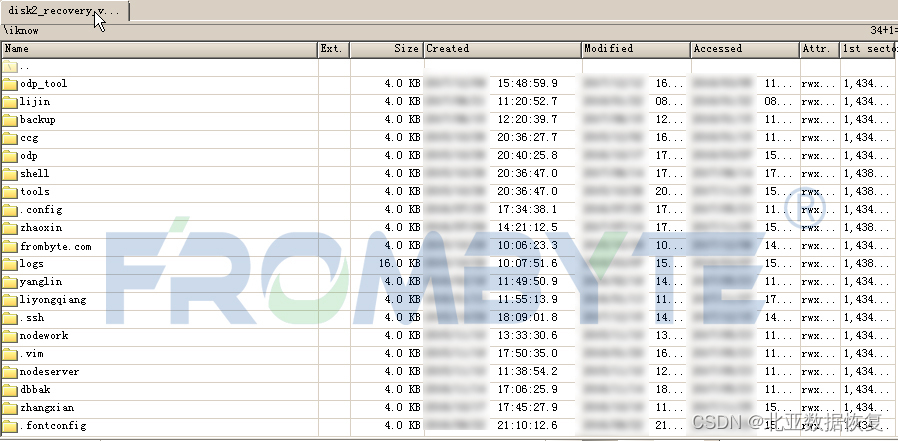
服务器数据恢复—KVM虚拟机被误删除如何恢复虚拟磁盘文件?
服务器数据恢复环境&故障: 1台服务器,Linux操作系统EXT4文件系统,部署了数台KVM虚拟机,每台虚拟机包含一个qcow2格式的磁盘文件,和一个raw格式的磁盘文件。 工作人员操作失误删除了3台服务器上的KVM虚拟机…...

工具清单 - 看板工具
# 工具清单 Crepido在新窗口打开 - Create (kanban) boards to track users and projects from flat markdown files. MIT NodejsKanboard在新窗口打开 - Simple and open source visual task board. (Source Code在新窗口打开) MIT PHPmyTinyTodo在新窗口打开 - Simple way t…...

Go微服务: 分布式之发送带有事务消息的示例
分布式之发送带有事务消息 现在做一个RocketMQ的事务消息的 demo 1 )生产者 package mainimport ("context""fmt""time""github.com/apache/rocketmq-client-go/v2""github.com/apache/rocketmq-client-go/v2/prim…...

【go】go初始化命令总结
包初始化 test项目目录下执行 go mod init test go mod tidy生成二进制可执行文件 go build -o test .\main.go...

vue音乐播放条
先看效果 再看代码 <template><div class"footer-player z-30 flex items-center p-2"><div v-if"isShow" class"h-12 w-60 overflow-hidden"><div :style"activeStyle" class"open-detail-control-wrap&…...

halcon实现浓淡补正,中间值补正-抽取暗
代码效果 抽取前 中值抽取暗 halcon函数代码 测试图片参数 NoiseCut:16 Gain:1 输入ImagePart NoiseCut Gain *获取直方图 get_domain (ImagePart, Domain) gray_histo_range(Domain,ImagePart,0,255,256, Histo, BinSize) area_center(Domain, NumPixels, Row, Column) …...
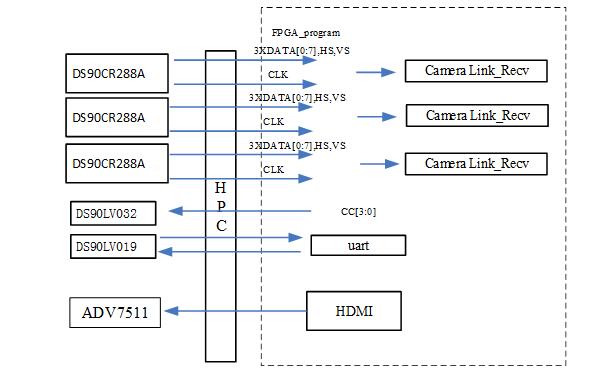
太速科技-FMC213V3-基于FMC兼容1.8V IO的Full Camera Link 输入子卡
FMC213V3-基于FMC兼容1.8V IO的Full Camera Link 输入子卡 一、板卡概述 该板卡为了考虑兼容1.8V电平IO,适配Virtex7,Kintex Ultrascale,Virtex ultrasacle FPGA而特制,如果要兼容原来的3.3V 也可以修改硬件参数。板卡支持1路…...

GPU短缺和模型效率的推动
1. 引言 随着全球GPU短缺和云计算成本的不断上升,开发更高效的AI模型成为了当前的焦点。技术如低秩适应(LoRA)和量化(Quantization)在优化性能的同时,减少了资源需求。这些技术不仅在当前的AI开发中至关重…...

linux在文件夹中查找文件内容
linux在文件夹中查找文件内容 在Linux中,可以通过以下多个途径,在文件夹中查找文件内容: 1、使用grep命令: grep -r "要查找的内容" /path/to/folder-r参数表示递归地在文件夹及其子文件夹中搜索。/path/to/folder是要搜索的文件夹路径。2、使用ack命令 ack …...
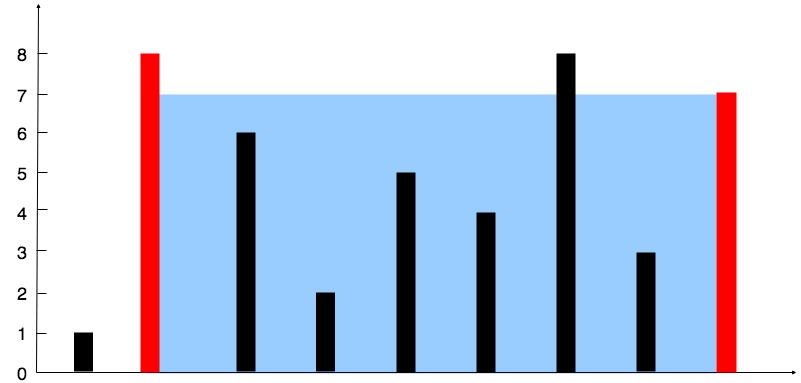
算法:11. 盛最多水的容器
11. 盛最多水的容器 给定一个长度为 n 的整数数组 height 。有 n 条垂线,第 i 条线的两个端点是 (i, 0) 和 (i, height[i]) 。 找出其中的两条线,使得它们与 x 轴共同构成的容器可以容纳最多的水。 返回容器可以储存的最大水量。 说明:你…...

Hazelcast 分布式缓存 在Seatunnel中的使用
1、背景 最近在调研seatunnel的时候,发现新版的seatunnel提供了一个web服务,可以用于图形化的创建数据同步任务,然后管理任务。这里面有个日志模块,可以查看任务的执行状态。其中有个取读数据条数和同步数据条数。很好奇这个数据…...

分数限制下,选好专业还是选好学校?
目录 分数限制下,选好专业还是选好学校? 方向一:专业解析 1. 专业选择的重要性 2. 不同专业的优势与挑战 3. 个人专业选择经验分享 4. 实际场景下的“专业VS学校”选择方案 方向二:名校效应分析 1. 名校声誉与品牌效应 2…...
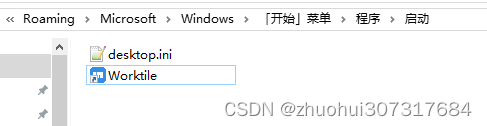
软件改为开机自启动
1.按键 win R,输入“shell:startup”命令, 然后就可以打开启动目录了,如下: 2.然后,把要开机启动的程序的图标拖进去即可。 参考:开机启动项如何设置...

Postman与JMeter协同实战:接口功能验证与性能压测一体化方案
1. 这不是工具组合秀,而是接口测试工程师的生存现场你有没有过这样的经历:开发刚提测,接口文档还没写完,测试环境连基础鉴权都配不齐,但上线时间表已经钉死在下周三?这时候打开Postman点几下,发…...

影刀RPA跨境店群运营架构:Python高并发协同与Chromium指纹环境隔离实战
影刀RPA跨境店群运营架构:Python高并发协同与Chromium指纹环境隔离实战 架构师观察:流水线下的底层较量 近日,科技圈的头条毫无意外地被某头部视频生成大模型(被誉为 Seedance 2.0 最强对手)偷跑的内测演示视频彻底霸…...

数字主权还是数字枷锁?德国eIDAS钱包的Apple/Google账户依赖之困
数字主权还是数字枷锁?德国eIDAS钱包的Apple/Google账户依赖之困 2025年的深秋,一则来自德国联邦内政部(BMI)的技术文档在开发者社区引发了轩然大波。文档明确指出,即将在德国落地的eIDAS钱包——这个承载着欧盟数字身…...

抖音批量下载器终极指南:如何3分钟搞定无损音乐提取与高效素材管理
抖音批量下载器终极指南:如何3分钟搞定无损音乐提取与高效素材管理 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fa…...

Sketch MeaXure:5分钟掌握设计标注终极解决方案
Sketch MeaXure:5分钟掌握设计标注终极解决方案 【免费下载链接】sketch-meaxure 项目地址: https://gitcode.com/gh_mirrors/sk/sketch-meaxure 你是否还在为设计稿标注而烦恼?Sketch MeaXure正是为你量身打造的现代化设计标注神器!…...

DeepSeek V4价格打骨折,宁王京东网易抢着入场,梁文锋:目标是AGI
听雨 发自 凹非寺量子位 | 公众号 QbitAI同一天,DeepSeek又发生两件大事。一边,DeepSeek-V4-Pro API宣布永久降价。从 6月1日起,V4 Pro的API价格将正式调整为当前促销价,不再恢复原价。另一边,The Information爆料&…...

Warcraft Helper终极指南:5分钟让你的魔兽争霸3在现代系统流畅运行
Warcraft Helper终极指南:5分钟让你的魔兽争霸3在现代系统流畅运行 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸3在Wind…...

终极指南:如何用MAA明日方舟助手告别重复操作,轻松实现游戏自动化
终极指南:如何用MAA明日方舟助手告别重复操作,轻松实现游戏自动化 【免费下载链接】MaaAssistantArknights 《明日方舟》小助手,全日常一键长草!| A one-click tool for the daily tasks of Arknights, supporting all clients. …...

DamaiHelper:基于Python+Selenium的大麦网自动化抢票解决方案
DamaiHelper:基于PythonSelenium的大麦网自动化抢票解决方案 【免费下载链接】DamaiHelper 大麦网演唱会演出抢票脚本。 项目地址: https://gitcode.com/gh_mirrors/dama/DamaiHelper 你是否曾经在演唱会门票开售的瞬间,面对"秒光"的票…...

用Python+SPSS搞定数学建模A题:从问卷数据清洗到慢性病影响因素分析全流程
PythonSPSS数学建模实战:慢性病影响因素分析与可视化全流程数学建模竞赛中,数据处理与分析能力往往决定了作品的深度与竞争力。面对慢性病影响因素分析这类典型的社会医学问题,如何高效完成从原始问卷到可视化报告的全流程?本文将…...