qt 实现模拟实际物体带速度的移动(水平、垂直、斜角度)——————附带完整代码
文章目录
- 0 效果
- 1 原理
- 1.1 图片旋转
- 1.2 物体按照现实中的实际距离带真实速度移动
- 2 完整实现
- 2.1 将车辆按钮封装为一个类:
- 2.2 调用方法
- 3 完整代码
- 参考
0 效果
实现后的效果如下



可以显示属性(继承自QToolButton):

鼠标悬浮显示文字
按钮显示文字
1 原理
类继承自QToolButton,默认朝右行驶为正方向,设置图片为按钮的图标:
1.1 图片旋转
- 1,如果水平移动,朝左移动(纵坐标差值为0,横坐标差值为负【终点-起点,后面计算方式相同】),则对图片进行镜像处理
image.mirrored;
QImage rotateImage(const QImage &image, qreal fAngle)
{QTransform transform;transform.rotate(fAngle);return image.transformed(transform, Qt::SmoothTransformation);}QImage tmp;if(r_x == 0 ) //Y轴{if(r_y > 0){tmp = rotateImage(m_image,90.0);}else{tmp = rotateImage(m_image,270.0);}}
朝右
朝左
- 2,如果是垂直移动,朝下移动(水平坐标差值为0,纵坐标差值大于0),把图片顺时针旋转90度;朝上移动(水平坐标差值为0,纵坐标差值小于0),图片顺指针旋转270度(对图片使用镜像
image.transformed处理);
QImage filp(const QImage &image, bool bIsHorizon)
{return image.mirrored(bIsHorizon,!bIsHorizon);
}else if(r_y == 0) //X轴{if(r_x >0){tmp = m_image;}else{tmp = filp(m_image,true);}}

朝下

朝上
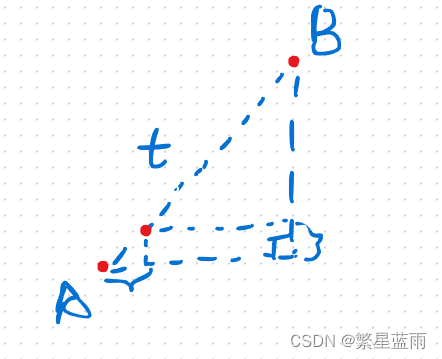
- 3,如果是倾斜移动,计算弧度(纵坐标的差和横坐标的差的比值(tan值)取反正切值(
qAtan(r_y/r_x));),把弧度转为角度(qAtan(r_y/r_x)*180/PI;)【二、三象限的旋转角度为负数】;如果方向位于第2,3象限(因为x轴正向,为水平朝右,y轴正向,为垂直向下),则把车图片做镜像处理(image.transformed处理,把车头调为朝左);
//核心QImage _filp = filp(m_image,true);qreal k = qAtan(r_y/r_x)*180/PI;tmp = rotateImage(_filp,k);
下面为四个象限的情况:
else if(r_x > 0 && r_y > 0) //第一象限{qreal k = qAtan(r_y/r_x)*180/PI;tmp = rotateImage(m_image,k);qDebug()<<"第一象限:"<<k;}else if(r_x < 0 && r_y > 0) //第二象限{QImage _filp = filp(m_image,true);qreal k = qAtan(r_y/r_x)*180/PI;qDebug()<<"第二象限:"<<k;tmp = rotateImage(_filp,360.0 + k);//顺时针旋转//tmp = rotateImage(_filp, k);//逆时针旋转}else if(r_x < 0 && r_y < 0) //第三象限{QImage _filp = filp(m_image,true);qreal k = qAtan(r_y/r_x)*180/PI;tmp = rotateImage(_filp,k);qDebug()<<"第三象限:"<<k;}else if(r_x > 0 && r_y < 0) //第四象限{qreal k = qAtan(r_y/r_x)*180/PI;tmp = rotateImage(m_image,360.0+k);//tmp = rotateImage(m_image, k);qDebug()<<"第四象限:"<<k;}
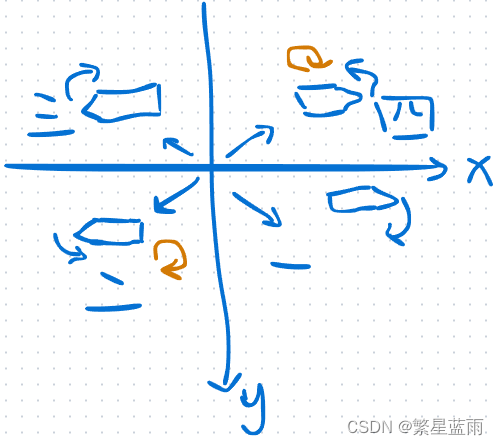
四个象限

左上(位于第三象限)

右上(位于第四象限)

右下(位于第一象限)
左下(位于第二象限)
1.2 物体按照现实中的实际距离带真实速度移动
前提:
- 1,使用
QTimer计时器,进行刷新,来更新物体位置;- 2,传入每个线段路径的起点和终点到向量(Vector)构成总路线;
- 3, 使用
move方法来进行物体移动;
算法:
- 1,根据总路线,依次计算出两点间的距离(两点间距离公式),累加后构成图形中的总距离
m_linedistance;
for(int i = 1;i< m_pointVector.size();i++){m_linedistanceVector.push_back(qSqrt((m_pointVector[i].x() - m_pointVector[i-1].x())*(m_pointVector[i].x() - m_pointVector[i-1].x())+(m_pointVector[i].y() - m_pointVector[i-1].y())*(m_pointVector[i].y() - m_pointVector[i-1].y())));m_linedistance += m_linedistanceVector.back();}
- 2,计算出图形中单次刷新的实际移动的距离(像素):
- 使用图形中的总距离
m_linedistance(单位:像素)除以输入的距离m_distance(单位:m),得到图形中1像素代表实际距离中多少米; - 使用速度
m_speed(单位:m/s)乘以时间time(单位:s,为QTimer的刷新时间)得到目前移动的像素;
- 使用图形中的总距离
qreal move_line = (time * m_speed)*m_linedistance/m_distance;
- 3,计算出坐标的变化:
- 计算方法:用上一步算出的实际移动的距离除以起点和终点两点间的距离得到移动的比列,起点的横、纵坐标分别加上比列乘以横、纵坐标的起终点之差,得到下一次移动后的坐标位置;
QPoint p;qreal t = qSqrt((end.x() - start.x())*(end.x() - start.x()) + (end.y() - start.y())*(end.y() - start.y()));p.setX((end.x() - start.x())*distance/t + start.x());p.setY((end.y() - start.y())*distance/t + start.y());
-
- 更换线路:如果当前点移动的距离和超过起点和终点间的距离差(也就是换到下一段线路上,且不是终点时),下一段线路的应该移动的距离减去当前点移动后超过的距离值(为了使得最终用时无误)为实际移动距离;
if(m_linedistanceVector[m_curposindex] <= m_curlinedistance + move_line)//超越该点{qDebug()<<"换点的距离:"<<"m_curlinedistance:"<<m_curlinedistance<<" m_linedistanceVector[m_curposindex]: "<<m_linedistanceVector[m_curposindex];//下一个点移动的距离 - 上一点移动的还未移动完的距离:为了使驾驶的时间正确m_curlinedistance = m_curlinedistance + move_line - m_linedistanceVector[m_curposindex];m_curposindex++;if(m_curposindex == m_pointVector.size() - 1)//当前点在终点{m_curlinedistance = 0;m_curposx = m_pointVector.back().x();m_curposy = m_pointVector.back().y();}else{QPoint pt = getPoswithLinedistance(m_curlinedistance, m_pointVector[m_curposindex], m_pointVector[m_curposindex+1]);m_curposx = pt.x();m_curposy = pt.y();//旋转图标位置setImageRote(m_pointVector[m_curposindex].x(), m_pointVector[m_curposindex].y(), m_pointVector[m_curposindex+1].x(), m_pointVector[m_curposindex+1].y());}}
- 4,终止:如果该点为最后一个点,则车辆停止(停止定时器刷新);
class xx{//计时器QTimer m_timer;
};if(m_curposindex == m_pointVector.size() -1){//只剩最后一个坐标时,停止计时器(停车)m_timer.stop();}
2 完整实现
2.1 将车辆按钮封装为一个类:
#ifndef VEHICLE_TOOLBUTTON_H
#define VEHICLE_TOOLBUTTON_H
#include <QToolButton>
#include <QTimer>class VehicleToolButton : public QToolButton
{Q_OBJECTpublic:/*** @brief 使用默认图片* @param parent*/VehicleToolButton(QWidget *parent = nullptr);/*** @brief VehicleToolButton* @param image:按钮的图标的文件路径* @param size:按钮大小* @param parent*/VehicleToolButton(QString imagePath, QSize size,QWidget *parent = nullptr);~VehicleToolButton();public:/*** @brief 得到速度* @return*/qreal getSpeed();/*** @brief 强制设置显示位置* @param x* @param y*/void setCurCoordinate(int x,int y);/*** @brief 设置现在所处位置* @param x* @param y*/void setCurrentPosition(int x, int y);/*** @brief 改变速度* @param _speed*/void setSpeed(qreal _speed);/*** @brief 设置行进参数* @param _v_point* @param _distance* @param _speed*/void setData(QVector<QPoint> _v_point, qreal _distance, qreal _speed);/*** @brief 设置图标图片* @param image*/void setImage(QImage image);/*** @brief 设置图标大小* @param size*/void setSize(QSize size);private:/*** @brief 计算从起点到终点方向距离distance的坐标点* @param distance* @param start* @param end* @return*/QPoint getPoswithLinedistance(qreal distance,QPoint start,QPoint end);/*** @brief 按水平轴或者垂直线作镜像翻转,bIsHorizon为true按水平轴,false按垂直方向* @param image* @param bIsHorizon* @return*/QImage filp(const QImage& image,bool bIsHorizon);/*** @brief 根据弧度值(角度值)起点(x1,y1)和终点(x2,y2)确定图片旋转的角度* @param x1* @param y1* @param x2* @param y2*/void setImageRote(int x1,int y1,int x2,int y2);/*** @brief 将图片按顺时针方向旋转一定的角度,fAngle为角度值* @param image* @param fAngle* @return*/QImage rotateImage(const QImage& image,qreal fAngle);/*** @brief 根据弧度值(角度值)r_x,r_y确定图片旋转的角度* @param r_x* @param r_y*/void setImageRote(qreal r_x,qreal r_y);/*** @brief //根据车速和运动轨迹计算time时间之后位置,timer事件调用move()函数移动到该位置,* @param time* @param x* @param y*/void getCurrentPos(qreal time,int& x,int& y);public slots:/*** @brief 刷新图片*/void updatedisplay();/*** @brief 开始定时器* @param _msec*/void startTimer(int _msec);private:QImage m_image;//按钮图标QSize m_pixSize;//按钮大小//车辆行进数据结构QVector<QPoint> m_pointVector; //行驶路径点集合(图上位置)QVector<qreal> m_linedistanceVector; //行驶路径段在图上的线段长度qreal m_distance; //行驶路径总长度(单位m)qreal m_linedistance; //行驶路径在图上的总长度int m_curposindex; //当前所在点的下标qreal m_curlinedistance; //当前所在线段上距离qreal m_curlinetotledistance; //当前行驶完成的路径长度总和int m_curposx; //当前在图上的点X坐标int m_curposy; //当前在图上的点Y坐标qreal m_speed; //当前车速//设置刷新时间(毫秒)int m_refreshTime = 10;//计时器QTimer m_timer;signals:/*** @brief 停止移动*/void stopVehicleMove();
};#endif // VEHICLE_TOOLBUTTON_H
#include "vehicle_toolbutton.h"
#include <qmath.h>
#include <QDebug>
#define PI 3.1415926VehicleToolButton::VehicleToolButton(QWidget *parent) : QToolButton(parent){//设置按钮大小this->setFixedSize(50, 50);//设置图标大小this->setIconSize(QSize(50,50));this->setAutoRaise(true);//设置按钮自动凸起this->setToolButtonStyle(Qt::ToolButtonTextUnderIcon);QPixmap icoPix(":/Image/car.png");//QPixmap icoPix = QPixmap::fromImage(l_image);icoPix.scaled(QSize(50,50), Qt::IgnoreAspectRatio, Qt::SmoothTransformation);m_image = icoPix.toImage();m_pixSize = QSize(50,50);this->setIcon(QIcon(icoPix));}VehicleToolButton::VehicleToolButton(QString imagePath, QSize size, QWidget *parent)
:QToolButton(parent), m_pixSize(size)
{m_image.load(imagePath);//设置按钮大小this->setFixedSize(size.width(), size.height());//设置图标大小this->setIconSize(size);this->setAutoRaise(true);//设置按钮自动凸起this->setToolButtonStyle(Qt::ToolButtonTextUnderIcon);QPixmap icoPix = QPixmap::fromImage(m_image);icoPix.scaled(size, Qt::IgnoreAspectRatio, Qt::SmoothTransformation);m_image = icoPix.toImage();this->setIcon(QIcon(icoPix));}VehicleToolButton::~VehicleToolButton()
{}void VehicleToolButton::updatedisplay()
{int x=0, y=0;getCurrentPos(m_refreshTime*0.001, x, y);//得到现在的坐标this->move(x, y);//移动if(m_curposindex == m_pointVector.size() -1){//只剩最后一个坐标时,停止计时器(停车)//emit stopVehicleMove();m_timer.stop();}
}void VehicleToolButton::startTimer(int _msec)
{m_refreshTime = _msec;//关联计时器//connect(&m_timer, &QTimer::timeout, this, &VehicleToolButton::updatedisplay);//关联计时器connect(&m_timer, &QTimer::timeout, this, &VehicleToolButton::updatedisplay, Qt::UniqueConnection);m_timer.start(_msec);
}qreal VehicleToolButton::getSpeed()
{return m_speed;
}
//根据车速和运动轨迹计算time时间之后位置,timer事件调用move()函数移动到该位置
void VehicleToolButton::getCurrentPos(qreal time, int &x, int &y)
{if(m_linedistance <=0 )//所有点之间的距离为0return;//time = 刷新时间(单位为s)//time * m_speed:得到图形中点的距离长度//m_linedistance/m_distance:图形中的距离和设置距离的比列(图形中的距离1像素对应设置的实际距离?米)qreal move_line = (time * m_speed)*m_linedistance/m_distance;if(m_curposindex == m_pointVector.size()-1)//当前点在终点{}else{if(m_linedistanceVector[m_curposindex] <= m_curlinedistance + move_line)//超越该点{//下一个点移动的距离 - 上一点移动的还未移动完的距离:为了使驾驶的时间正确m_curlinedistance = m_curlinedistance + move_line - m_linedistanceVector[m_curposindex];m_curposindex++;if(m_curposindex == m_pointVector.size() - 1)//当前点在终点{m_curlinedistance = 0;m_curposx = m_pointVector.back().x();m_curposy = m_pointVector.back().y();}else{QPoint pt = getPoswithLinedistance(m_curlinedistance, m_pointVector[m_curposindex], m_pointVector[m_curposindex+1]);m_curposx = pt.x();m_curposy = pt.y();//旋转图标位置setImageRote(m_pointVector[m_curposindex].x(), m_pointVector[m_curposindex].y(), m_pointVector[m_curposindex+1].x(), m_pointVector[m_curposindex+1].y());}}else{m_curlinedistance += move_line;QPoint pt = getPoswithLinedistance(m_curlinedistance, m_pointVector[m_curposindex], m_pointVector[m_curposindex + 1]);m_curposx = pt.x();m_curposy = pt.y();}m_curlinetotledistance += move_line;}x = m_curposx;y = m_curposy;}void VehicleToolButton::setCurCoordinate(int x, int y)
{m_curposx = x;m_curposy = y;
}void VehicleToolButton::setCurrentPosition(int x, int y)
{this->move(x,y);
}void VehicleToolButton::setSpeed(qreal _speed)
{m_speed = _speed;
}
//设置行进参数
void VehicleToolButton::setData(QVector<QPoint> _v_point, qreal _distance, qreal _speed)
{m_pointVector.clear();m_linedistanceVector.clear();m_pointVector = _v_point;m_distance = _distance;m_speed = _speed;m_linedistance = 0;//距离总长度m_curposindex = -1;m_curposx = -1;m_curposy = -1;m_curlinetotledistance = 0;//计算两点间的距离长度for(int i = 1;i< m_pointVector.size();i++){m_linedistanceVector.push_back(qSqrt((m_pointVector[i].x() - m_pointVector[i-1].x())*(m_pointVector[i].x() - m_pointVector[i-1].x())+(m_pointVector[i].y() - m_pointVector[i-1].y())*(m_pointVector[i].y() - m_pointVector[i-1].y())));m_linedistance += m_linedistanceVector.back();}//位置坐标大于2个,设置最开始的坐标为起始位置,并旋转图片if(m_pointVector.size() > 0 ){m_curposindex = 0;m_curlinedistance = 0;m_curposx = m_pointVector[0].x();m_curposy = m_pointVector[0].y();if(m_pointVector.size() >1)setImageRote(m_pointVector[0].x(), m_pointVector[0].y(), m_pointVector[1].x(), m_pointVector[1].y());}
}void VehicleToolButton::setImage(QImage image)
{m_image = image;
}void VehicleToolButton::setSize(QSize size)
{m_pixSize = size;
}
//计算从起点到终点方向距离distance的坐标点
QPoint VehicleToolButton::getPoswithLinedistance(qreal distance, QPoint start, QPoint end)
{QPoint p;qreal t = qSqrt((end.x() - start.x())*(end.x() - start.x()) + (end.y() - start.y())*(end.y() - start.y()));p.setX((end.x() - start.x())*distance/t + start.x());p.setY((end.y() - start.y())*distance/t + start.y());return p;
}
//按水平轴或者垂直线作镜像翻转,bIsHorizon为true按垂直方向,false按水平轴
QImage VehicleToolButton::filp(const QImage &image, bool bIsHorizon)
{return image.mirrored(bIsHorizon,!bIsHorizon);
}//根据弧度值(角度值)起点(x1,y1)和终点(x2,y2)确定图片旋转的角度
void VehicleToolButton::setImageRote(int x1, int y1, int x2, int y2)
{setImageRote(qreal(x2-x1),qreal(y2-y1));
}
//将图片按顺时针方向旋转一定的角度,fAngle为角度值
QImage VehicleToolButton::rotateImage(const QImage &image, qreal fAngle)
{// QMatrix matrix;// matrix.rotate(fAngle);// return image.transformed(matrix, Qt::SmoothTransformation);QTransform transform;transform.rotate(fAngle);return image.transformed(transform, Qt::SmoothTransformation);}
//根据弧度值(角度值)r_x,r_y确定图片旋转的角度(核心算法)
void VehicleToolButton::setImageRote(qreal r_x, qreal r_y)
{//坐标和理论坐标轴不同,X轴正向为水平右,Y轴正向为垂直向下QImage tmp;if(r_x == 0 && r_y == 0)return;if(r_x == 0 ) //Y轴{if(r_y > 0){tmp = rotateImage(m_image,90.0);}else{tmp = rotateImage(m_image,270.0);}}else if(r_y == 0) //X轴{if(r_x >0){tmp = m_image;}else{tmp = filp(m_image,true);}}else if(r_x > 0 && r_y > 0) //第一象限{qreal k = qAtan(r_y/r_x)*180/PI;tmp = rotateImage(m_image,k);qDebug()<<"第一象限:"<<k;}else if(r_x < 0 && r_y > 0) //第二象限{QImage _filp = filp(m_image,true);qreal k = qAtan(r_y/r_x)*180/PI;qDebug()<<"第二象限:"<<k;tmp = rotateImage(_filp,360.0 + k);//顺时针旋转//tmp = rotateImage(_filp, k);//逆时针旋转}else if(r_x < 0 && r_y < 0) //第三象限{QImage _filp = filp(m_image,true);qreal k = qAtan(r_y/r_x)*180/PI;tmp = rotateImage(_filp,k);qDebug()<<"第三象限:"<<k;}else if(r_x > 0 && r_y < 0) //第四象限{qreal k = qAtan(r_y/r_x)*180/PI;tmp = rotateImage(m_image,360.0+k);//tmp = rotateImage(m_image, k);qDebug()<<"第四象限:"<<k;}tmp.scaled(this->width(), this->height());QPixmap icoPix = QPixmap::fromImage(tmp);icoPix.scaled(this->size(), Qt::IgnoreAspectRatio, Qt::SmoothTransformation);this->setIcon(QIcon(icoPix));
}2.2 调用方法
class MainInterface : public QMainWindow
{Q_OBJECTpublic:MainInterface(QWidget *parent = nullptr);~MainInterface();private:Ui::MainInterface *ui;private:VehicleToolButton* train;QVector<QPoint> m_trainMovePointVector;
signals:void startTrainMove(int msec=10);private slots:void on_pushButton_clicked();
};
MainInterface::MainInterface(QWidget *parent): QMainWindow(parent), ui(new Ui::MainInterface)
{ui->setupUi(this);QPixmap icoPix(":/Image/routeBackimage.png");icoPix.scaled(ui->label->size(), Qt::IgnoreAspectRatio, Qt::SmoothTransformation);ui->label->setScaledContents(true);ui->label->setPixmap(icoPix);//构造方法1// train = new VehicleToolButton(this);//构造方法2train = new VehicleToolButton(QString(":/Image/car.png"), QSize(50,50),this);//目标点,路径长度,速度train->setData(m_trainMovePointVector, 500.0, 20.0);train->hide();train->setText("车:112");train->setToolTip(QString("当前速度为:%1").arg(train->getSpeed()));connect(this, &MainInterface::startTrainMove, train, &VehicleToolButton::startTimer);// ui->label->hide();}//按钮点击事件
void MainInterface::on_pushButton_clicked()
{// QVector<QPoint> v_point;train->show();m_trainMovePointVector.clear();m_trainMovePointVector.push_back(QPoint(100,100));m_trainMovePointVector.push_back(QPoint(400,400));//对角线右下m_trainMovePointVector.push_back(QPoint(100,100));//对角线左上m_trainMovePointVector.push_back(QPoint(100,400));//向下开m_trainMovePointVector.push_back(QPoint(400,100));//对角线右上m_trainMovePointVector.push_back(QPoint(100,400));//对角线左下m_trainMovePointVector.push_back(QPoint(400,400));//向右开m_trainMovePointVector.push_back(QPoint(400,100));//向上开m_trainMovePointVector.push_back(QPoint(100,100));//向左开// m_trainMovePointVector.clear();// m_trainMovePointVector.push_back(QPoint(10, 822));// m_trainMovePointVector.push_back(QPoint(1200, 822));// m_trainMovePointVector.push_back(QPoint(10, 822));train->setData(m_trainMovePointVector, 300.0, 20.0);emit startTrainMove();
}
3 完整代码
代码仓库(欢迎star):
github
码云
参考
https://blog.csdn.net/u012739657/article/details/22645375
相关文章:
qt 实现模拟实际物体带速度的移动(水平、垂直、斜角度)——————附带完整代码
文章目录 0 效果1 原理1.1 图片旋转1.2 物体按照现实中的实际距离带真实速度移动 2 完整实现2.1 将车辆按钮封装为一个类:2.2 调用方法 3 完整代码参考 0 效果 实现后的效果如下 可以显示属性(继承自QToolButton): 鼠标悬浮显示文字 按钮…...
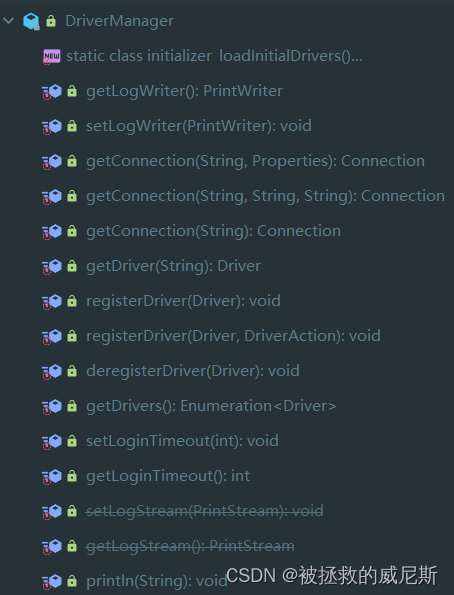
驱动开发(三):内核层控制硬件层
驱动开发系列文章: 驱动开发(一):驱动代码的基本框架 驱动开发(二):创建字符设备驱动 驱动开发(三):内核层控制硬件层 ←本文 目录…...
企业邮箱大附件无法上传?无法确认接收状态?这样解决就行
Outlook邮箱作为最常用的邮箱系统,被全世界企业采用作为内部通用沟通方式,但Outlook邮箱却有着明显的使用缺陷,如邮箱大附件上传障碍及附件接收无提示等。 1、企业邮箱大附件无法上传 Outlook企业邮箱大附件的上传上限一般是50M,…...
)
Kotlin 数据类(Data Class)
Kotlin 数据类(Data Class)是一种特别用于持有数据的类。它们简化了数据类的创建,并提供了一些自动生成的方法。下面详细介绍 Kotlin 数据类的原理和使用方法。 数据类的定义 Kotlin 中的数据类使用 data 关键字定义。例如: da…...
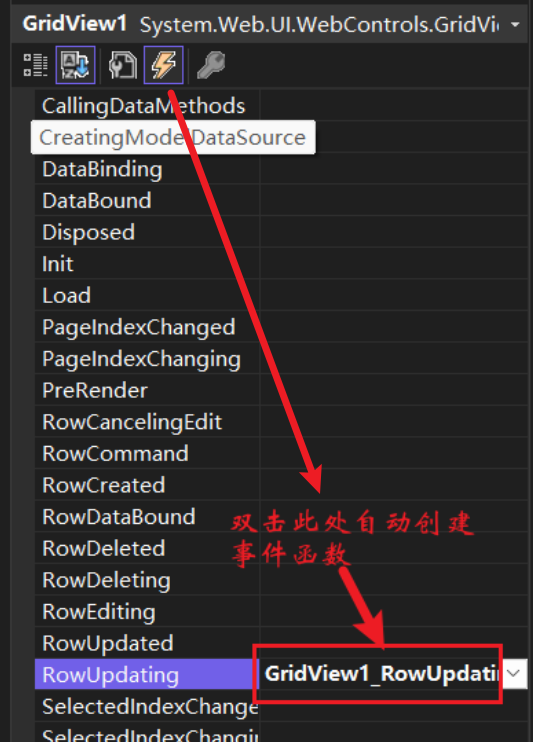
gridview自带编辑功能如何判断用户修改的值的合法性
在使用GridView的编辑功能更新值时,确保输入的值合法性是十分重要的。为了实现这一点,你可以在GridView的RowUpdating事件中加入代码来检查用户输入的值。如果发现输入的值不合法,你可以取消更新操作并向用户显示错误消息。下面是如何实现的步…...
设计模式-结构型-06-桥接模式
1、传统方式解决手机操作问题 现在对不同手机类型的不同品牌实现操作编程(比如:开机、关机、上网,打电话等),如图: UML 类图 问题分析 扩展性问题(类爆炸):如果我们再…...

安泰电压放大器的选型原则是什么
电压放大器是电子电路中常用的一种器件,主要用于放大输入电压信号。在选型电压放大器时,需要考虑以下几个原则。 根据应用需求确定放大倍数。放大倍数是指输出电压与输入电压之间的倍数关系,也称为增益。不同的应用场景对放大倍数的要求不同&…...
方法分享 |公网IP怎么指定非433端口实现https访问
公网IP可以通过指定非443端口实现HTTPS访问。在网络配置中,虽然HTTPS协议默认使用443端口,但没有规定不能在其他端口上实施HTTPS服务。使用非标准端口进行HTTPS通信需要正确配置服务器和SSL证书,并确保客户端能够连接到指定的端口。下面说明如…...
vue实现拖拽元素;vuedraggable拖拽插件
效果图: 中文文档 以下代码可直接复制使用 安装依赖 npm i -S vuedraggable使用 <template><div class"container"><div>使用flex竖轴布局 <br>handle".mover" 可拖拽的class类名 <br>filter".forbid&qu…...

Javascript介绍
Javascript 定义:一门简单的浏览器可解析的语言 作用:与HTML相结合使用,使我们的网页变得更加酷炫 发展史: 1.1992年,Nombase公司开发出来,校验表单,起名c--,后来更名为&#…...
毕业答辩PPT:如何在短时间内高效准备?
提起PPT,大家的第一反应就是痛苦。经常接触PPT的学生党和打工人,光看到这3个字母,就已经开始头痛了: 1、PPT内容框架与文案挑战重重,任务艰巨,耗费大量精力。 2、PPT的排版技能要求高,并非易事…...
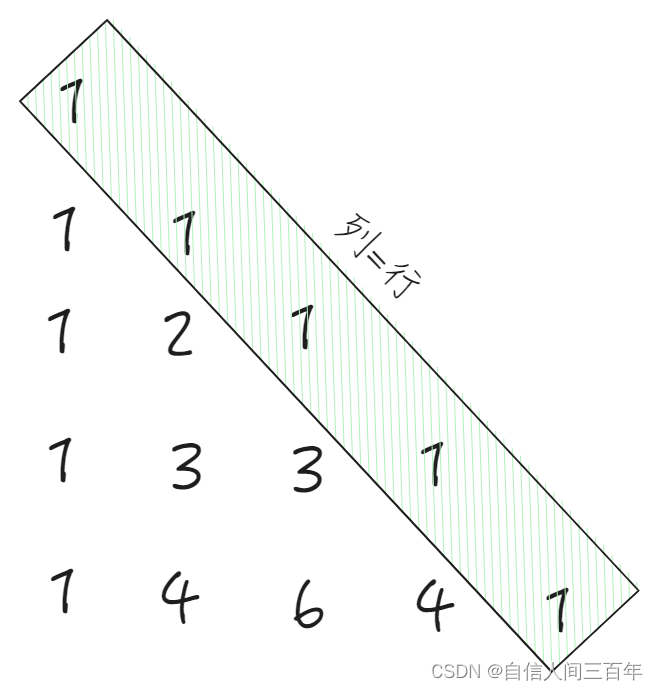
树结构与算法-杨辉三角形的两种实现
什么是杨辉三角形 本文旨在讨论普通杨辉三角形的两种实现方式:迭代法和递归法。我们不详细讲解杨辉三角形的数学问题,只研究其代码实现。 杨辉三角形大致如下图: 杨辉三角形的规律 通过对杨辉三角形的图形分析,我们可以看到这几点…...

【机器学习】智能创意工厂:机器学习驱动的AIGC,打造未来内容新生态
🚀时空传送门 🔍机器学习在AIGC中的核心技术📕深度学习🎈生成对抗网络(GANs) 🚀机器学习在AIGC中的具体应用🍀图像生成与编辑⭐文本生成与对话系统🌠音频生成与语音合成 …...

Python - 一个恶意脚本
Python - 恶意脚本 使用此脚本或修改前请注意以下几点: 系统资源:大量模拟键盘和鼠标事件可能会占用大量系统资源,会导致其他应用程序运行缓慢或崩溃。 隐私和安全:如果此脚本在未经用户同意的情况下运行,它可能侵犯…...
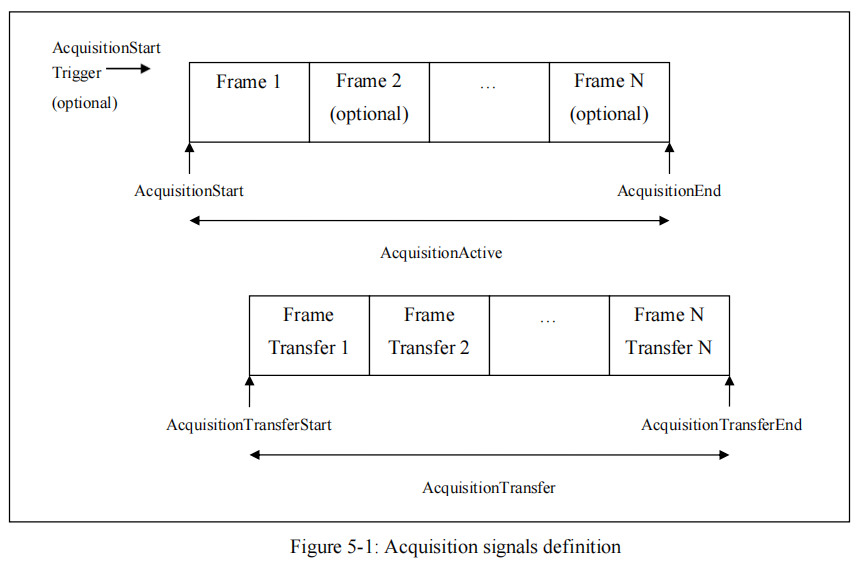
SFNC —— 采集控制(四)
系列文章目录 SFNC —— 标准特征命名约定(一) SFNC —— 设备控制(二) SFNC —— 图像格式控制(三) SFNC —— 采集控制(四) 文章目录 系列文章目录5、采集控制(Acquisi…...
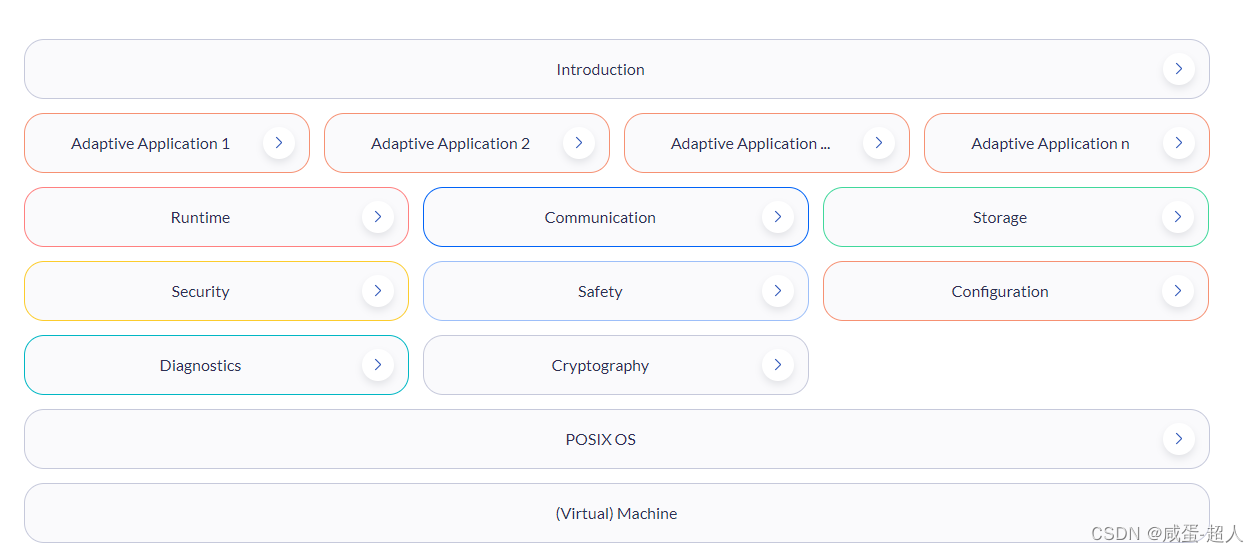
AUTOSAR学习
文章目录 前言1. 什么是autosar?1.1 AP(自适应平台autosar)1.2 CP(经典平台autosar)1.3 我的疑问 2. 为什么会有autosar3.autosar的架构3.1 CP的架构3.1.1 应用软件层3.1.2 运行时环境3.1.3 基础软件层 3.2 AP的架构 4. 参考资料 …...
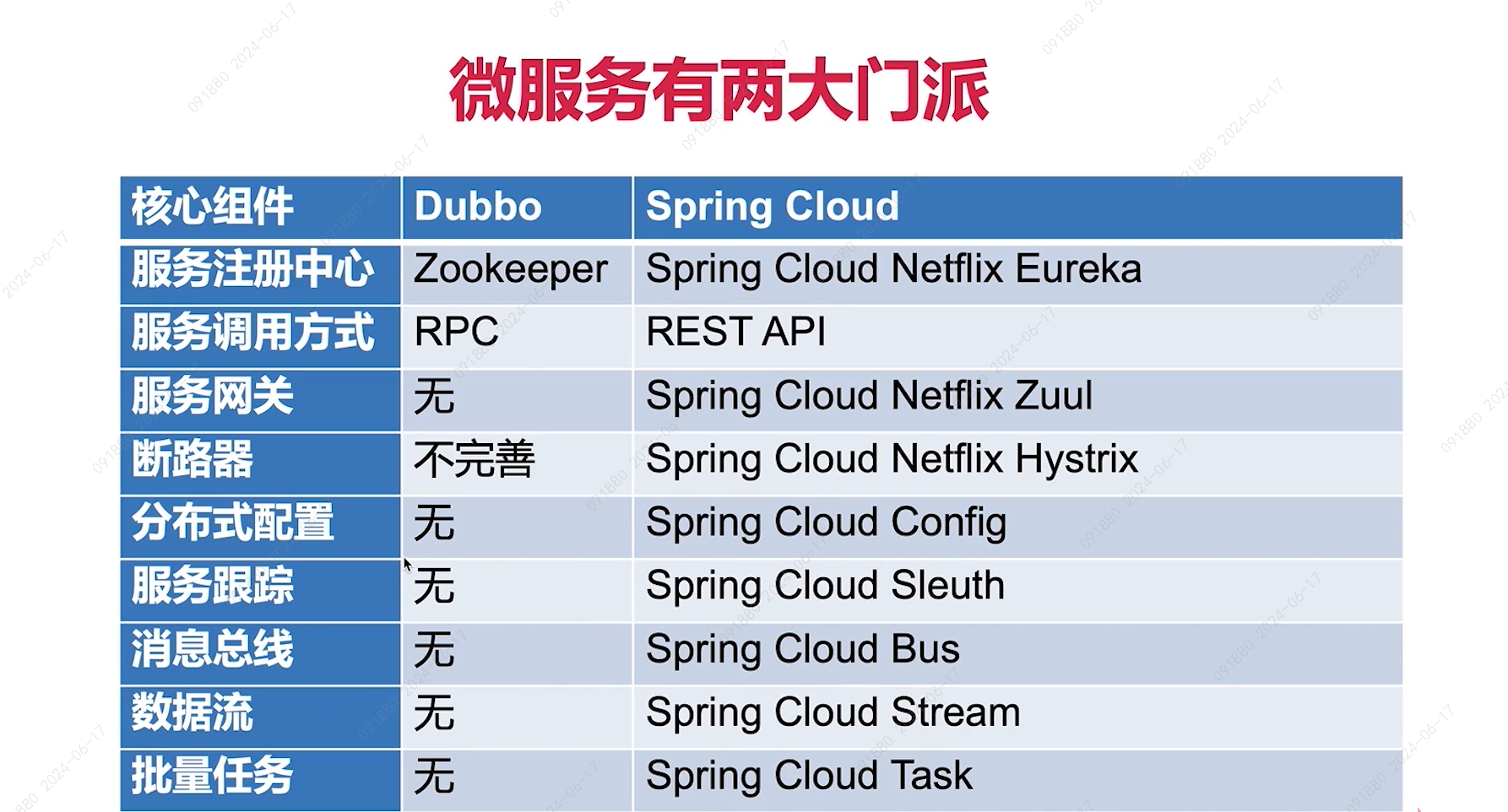
区区微服务,何足挂齿?
背景 睿哥前天吩咐我去了解一下微服务,我本来想周末看的,结果周末没带电脑,所以只能周一看了。刚刚我就去慕课网看了相关的视频,然后写一篇文章总结一下。这篇文章算是基础理论版,等我之后进行更多的实践,…...

数据结构 ->反转链表
工作原理 初始化: cur 指向传入的节点 node,即链表的头节点。prv 初始化为 NULL,用于存储当前节点的前一个节点。 循环反转: 在 while 循环中,当 cur 不为空时执行循环体。保存当前节点的下一个节点:使用 t…...
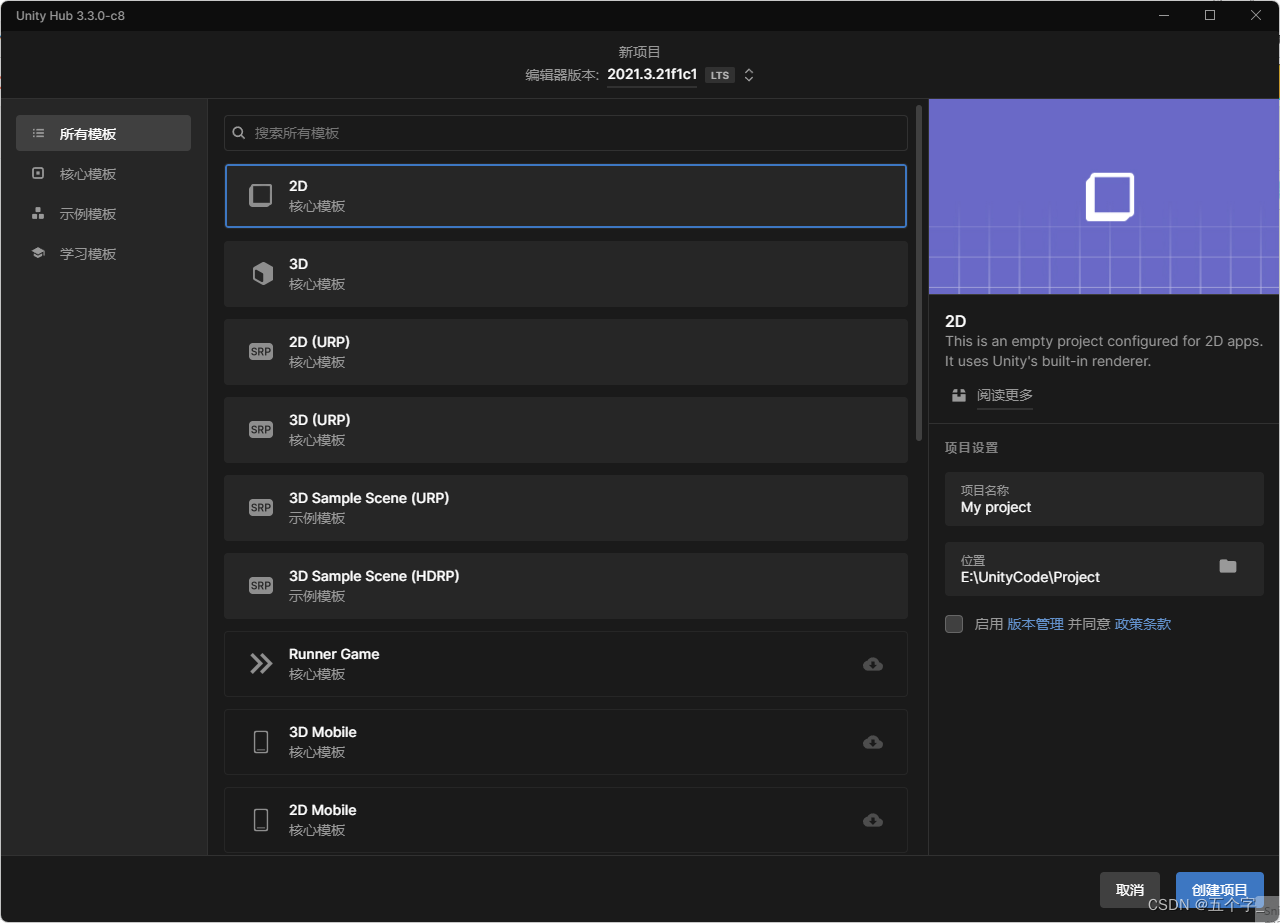
Unity基础(一)unity的下载与安装
目录 一:下载与安装 1.官网下载地址 2.推荐直接下载UnityHub 3.选择编辑器版本(推荐长期支持版) 4.在UnityHub安装选择相应的模块 二:创建项目 简介: Unity 是一款广泛应用的跨平台游戏开发引擎。 它具有以下显著特点: 强大的跨平台能力:能将开发的游…...
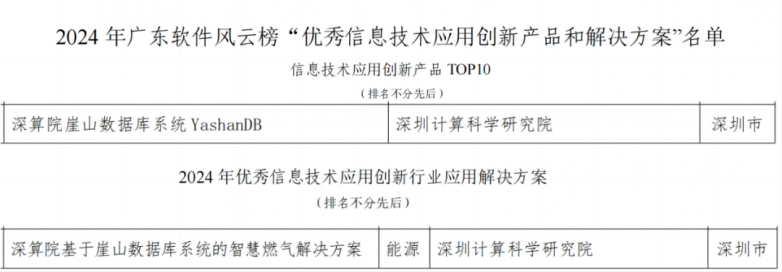
TOP10!YashanDB斩获广东省优秀信创产品与解决方案双料荣誉
近日,2024广东软件风云榜结果出炉,表彰为广东软件产业和数字经济、新型工业化发展作出突出贡献的企业、企业家、优秀产品等。深算院崖山数据库系统 YashanDB荣获广东省“2024年优秀信息技术应用创新产品TOP10”和“2024年优秀信息技术应用创新行业应用解…...

GEO优化实操框架:GEO优化的正确姿势是“带着答案去找客户”
如果你是B2B企业的老板或市场负责人,你一定听过这句话: “我们网上曝光是不少,但来的询盘都不对——问价格的比问方案的还多,还有不少是学生做调研的。” 这不是你一个人遇到的问题。这是传统SEO和竞价广告的天然缺陷——你只能“…...

2026年主流抓娃娃App大对比,哪个才是你的“抓宝神器”?
在当今快节奏的生活中,年轻人面临着来自学业、工作、社交等多方面的压力。为了缓解这些压力,寻找适合的解压方式成为了大家的共同需求。抓娃娃App作为一种新兴的娱乐方式,正逐渐受到年轻人的喜爱。下面我们就从潮流趋势、科技前沿、行业洞察等…...

终极免费Switch模拟器yuzu:解决电脑玩任天堂游戏的5大痛点
终极免费Switch模拟器yuzu:解决电脑玩任天堂游戏的5大痛点 【免费下载链接】yuzu 任天堂 Switch 模拟器 项目地址: https://gitcode.com/GitHub_Trending/yu/yuzu 想在电脑上畅玩Switch游戏却总是遇到各种问题?yuzu模拟器作为全球最受欢迎的开源任…...

终极免费城通网盘直连解析工具:告别下载限速的完整指南
终极免费城通网盘直连解析工具:告别下载限速的完整指南 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 还在为城通网盘下载速度慢、等待时间长而烦恼吗?ctfileGet是一款专为城通…...

终极显卡调校指南:如何用NVIDIA Profile Inspector释放游戏性能
终极显卡调校指南:如何用NVIDIA Profile Inspector释放游戏性能 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector NVIDIA Profile Inspector是一款专为NVIDIA显卡用户设计的免费优化工具&…...

开源机械爪OpenClaw:从设计到力控抓取的完整实现指南
1. 项目概述:从“OpenClaw”看开源机械爪的无限可能最近在逛GitHub的时候,发现了一个挺有意思的项目,叫“MeyerZhou/openclaw”。光看名字,你大概能猜到这是个关于机械爪的开源项目。没错,这是一个旨在提供低成本、模块…...

AI编程助手安全规则实战:从SQL注入防御到团队安全基线构建
1. 项目概述:当AI编程助手遇上安全红线最近在GitHub上看到一个挺有意思的项目,叫“cursor-security-rules”。光看名字,你大概能猜到它和Cursor这个AI编程工具有关,而且重点是“安全规则”。没错,这个项目本质上是一个…...

Vibe Coding Playbook:从环境到心流,打造高效愉悦的编程系统
1. 项目概述:一个关于“氛围感编程”的实践指南最近在GitHub上看到一个挺有意思的项目,叫“Vibe Coding Playbook”。乍一看这个标题,可能会有点摸不着头脑——“Vibe Coding”是什么?是某种新的编程范式吗?还是某种神…...

基于Taotoken统一API开发支持多模型切换的智能对话应用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 基于Taotoken统一API开发支持多模型切换的智能对话应用 应用场景类,场景是开发一个需要支持用户自由选择或系统自动切换…...

【仿真学习框架】HoloMotion 从入门到精通:全身人形控制 Foundation Model 完全指南
HoloMotion 从入门到精通:全身人形控制 Foundation Model 完全指南 目标读者:具身智能研究者、人形机器人开发者、RL/机器人学习工程师 目录 第1章 HoloMotion 全景概览 1.1 什么是 HoloMotion 1.2 技术定位:"小脑"基座模型 1.3 4-Any 愿景与路线图 1.4 核心能力矩…...