ROS 自动驾驶多点巡航
ROS 自动驾驶多点巡航:
1、首先创建工作空间:
基于我们的artca_ws;
2、创建功能包:
进入src目录,输入命令:
catkin_create_pkg point_pkg std_msgs rospy roscpp
test_pkg 为功能包名,后面两个是依赖;
3、创建python文件
我们通过vscode打开src下功能包:
创建 point.py:
代码内容写入 :
#!/usr/bin/env python
import rospy
import actionlib
import collections
from actionlib_msgs.msg import *
from geometry_msgs.msg import Pose, PoseWithCovarianceStamped, Point, Quaternion, Twist
from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal
from random import sample
from math import pow, sqrt class MultiNav(): def __init__(self): rospy.init_node('MultiNav', anonymous=True) rospy.on_shutdown(self.shutdown) # How long in seconds should the robot pause at each location? self.rest_time = rospy.get_param("~rest_time", 10) # Are we running in the fake simulator? self.fake_test = rospy.get_param("~fake_test", False) # Goal state return values goal_states = ['PENDING', 'ACTIVE', 'PREEMPTED','SUCCEEDED', 'ABORTED', 'REJECTED','PREEMPTING', 'RECALLING', 'RECALLED','LOST'] # Set up the goal locations. Poses are defined in the map frame. # An easy way to find the pose coordinates is to point-and-click # Nav Goals in RViz when running in the simulator. # Pose coordinates are then displayed in the terminal # that was used to launch RViz. locations = collections.OrderedDict() locations['point-1'] = Pose(Point(5.21, -2.07, 0.00), Quaternion(0.000, 0.000, -0.69, 0.72)) locations['point-2'] = Pose(Point(3.50, -5.78, 0.00), Quaternion(0.000, 0.000, 0.99, 0.021))#locations['point-3'] = Pose(Point(-6.95, 2.26, 0.00), Quaternion(0.000, 0.000, 0.000, 1.000))#locations['point-4'] = Pose(Point(-6.50, 2.04, 0.00), Quaternion(0.000, 0.000, 0.000, 1.000))# Publisher to manually control the robot (e.g. to stop it) self.cmd_vel_pub = rospy.Publisher('cmd_vel', Twist, queue_size=5) # Subscribe to the move_base action server self.move_base = actionlib.SimpleActionClient("move_base", MoveBaseAction) rospy.loginfo("Waiting for move_base action server...") # Wait 60 seconds for the action server to become available self.move_base.wait_for_server(rospy.Duration(10)) rospy.loginfo("Connected to move base server") # A variable to hold the initial pose of the robot to be set by the user in RViz initial_pose = PoseWithCovarianceStamped() # Variables to keep track of success rate, running time, and distance traveled n_locations = len(locations) n_goals = 0 n_successes = 0 i = 0 distance_traveled = 0 start_time = rospy.Time.now() running_time = 0 location = "" last_location = "" # Get the initial pose from the user rospy.loginfo("Click on the map in RViz to set the intial pose...") rospy.wait_for_message('initialpose', PoseWithCovarianceStamped) self.last_location = Pose() rospy.Subscriber('initialpose', PoseWithCovarianceStamped, self.update_initial_pose) keyinput = int(input("Input 0 to continue,or reget the initialpose!\n"))while keyinput != 0:rospy.loginfo("Click on the map in RViz to set the intial pose...") rospy.wait_for_message('initialpose', PoseWithCovarianceStamped) rospy.Subscriber('initialpose', PoseWithCovarianceStamped, self.update_initial_pose) rospy.loginfo("Press y to continue,or reget the initialpose!")keyinput = int(input("Input 0 to continue,or reget the initialpose!"))# Make sure we have the initial pose while initial_pose.header.stamp == "": rospy.sleep(1) rospy.loginfo("Starting navigation test") # Begin the main loop and run through a sequence of locations for location in locations.keys(): rospy.loginfo("Updating current pose.") distance = sqrt(pow(locations[location].position.x - initial_pose.pose.pose.position.x, 2) + pow(locations[location].position.y - initial_pose.pose.pose.position.y, 2)) initial_pose.header.stamp = "" # Store the last location for distance calculations last_location = location # Increment the counters i += 1 n_goals += 1 # Set up the next goal location self.goal = MoveBaseGoal() self.goal.target_pose.pose = locations[location] self.goal.target_pose.header.frame_id = 'map' self.goal.target_pose.header.stamp = rospy.Time.now() # Let the user know where the robot is going next rospy.loginfo("Going to: " + str(location)) # Start the robot toward the next location self.move_base.send_goal(self.goal) # Allow 5 minutes to get there finished_within_time = self.move_base.wait_for_result(rospy.Duration(300)) # Check for success or failure if not finished_within_time: self.move_base.cancel_goal() rospy.loginfo("Timed out achieving goal") else: state = self.move_base.get_state() if state == GoalStatus.SUCCEEDED: rospy.loginfo("Goal succeeded!") n_successes += 1 distance_traveled += distance else: rospy.loginfo("Goal failed with error code: " + str(goal_states[state])) # How long have we been running? running_time = rospy.Time.now() - start_time running_time = running_time.secs / 60.0 # Print a summary success/failure, distance traveled and time elapsed rospy.loginfo("Success so far: " + str(n_successes) + "/" + str(n_goals) + " = " + str(100 * n_successes/n_goals) + "%") rospy.loginfo("Running time: " + str(trunc(running_time, 1)) + " min Distance: " + str(trunc(distance_traveled, 1)) + " m") rospy.sleep(self.rest_time) def update_initial_pose(self, initial_pose): self.initial_pose = initial_pose def shutdown(self): rospy.loginfo("Stopping the robot...") self.move_base.cancel_goal() rospy.sleep(2) self.cmd_vel_pub.publish(Twist()) rospy.sleep(1)
def trunc(f, n): # Truncates/pads a float f to n decimal places without rounding slen = len('%.*f' % (n, f)) return float(str(f)[:slen]) if __name__ == '__main__': try: MultiNav() rospy.spin() except rospy.ROSInterruptException: rospy.loginfo("AMCL navigation test finished.") 4、编译:
nano@nano-desktop:~/artcar_ws/src$ cd ..
nano@nano-desktop:~/artcar_ws$ catkin build

5、案例实操;
启动小车并进入到相应环境:
(1)打开终端,启动底盘环境,输入如下命令:
$ roslaunch artcar_nav artcar_bringup.launch
(2)启动导航程序:
$ roslaunch artcar_nav artcar_move_base.launch
(3)启动RVIZ:
(4)获取点位:
rostopic echo /move_base_sile/goal
获取点位
roscar@roscar-virtual-machine:~/artcar_simulation/src$ rostopic echo /move_base_simple/goal
WARNING: no messages received and simulated time is active.
Is /clock being published?
header: seq: 0stamp: secs: 405nsecs: 141000000frame_id: "odom"
pose: position: x: 5.21420097351y: -2.07076597214z: 0.0orientation: x: 0.0y: 0.0z: -0.69109139328w: 0.722767380375
---
header: seq: 1stamp: secs: 422nsecs: 52000000frame_id: "odom"
pose: position: x: 3.50902605057y: -5.78046607971z: 0.0orientation: x: 0.0y: 0.0z: 0.999777096296w: 0.0211129752124
---
(5)修改point.py文件中点位数据的位置:

(6 ) 然后开启终端执行:
nano@nano-desktop:~/artcar_ws/src/point_pkg/src$ ./point.py
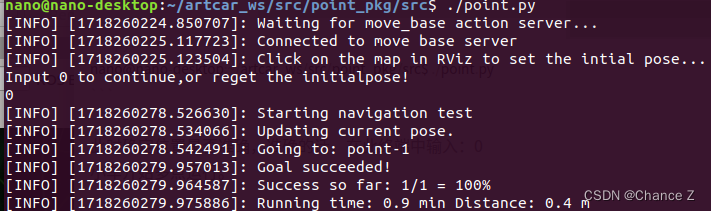
此时确定位置是否准确,准确的话,在此终端中输入:0
小车开始多点运行。
相关文章:
ROS 自动驾驶多点巡航
ROS 自动驾驶多点巡航: 1、首先创建工作空间: 基于我们的artca_ws; 2、创建功能包: 进入src目录,输入命令: catkin_create_pkg point_pkg std_msgs rospy roscpptest_pkg 为功能包名,后面两个是依赖&a…...
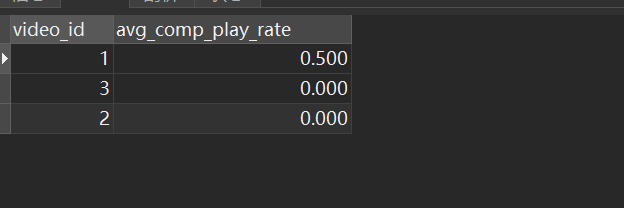
SQL学习,大厂面试真题(1):观看各个视频的平均完播率
各个视频的平均完播率 1、视频信息表 IDAuthorNameCategoryAgeStart Time1张三影视302024-01-01 7:00:002李四美食602024-01-01 7:00:003王麻子旅游902024-01-01 7:00:00 (video_id-视频ID, AuthorName-创作者, tag-类别标签, duration-视频时长(秒&…...
)
2023年全国大学生数学建模竞赛C题蔬菜类商品的自动定价与补货决策(含word论文和源代码资源)
文章目录 一、题目二、word版实验报告和源代码(两种获取方式) 一、题目 2023高教社杯全国大学生数学建模竞赛题目 C题 蔬菜类商品的自动定价与补货决策 在生鲜商超中,一般蔬菜类商品的保鲜期都比较短,且品相随销售时间的增加而…...
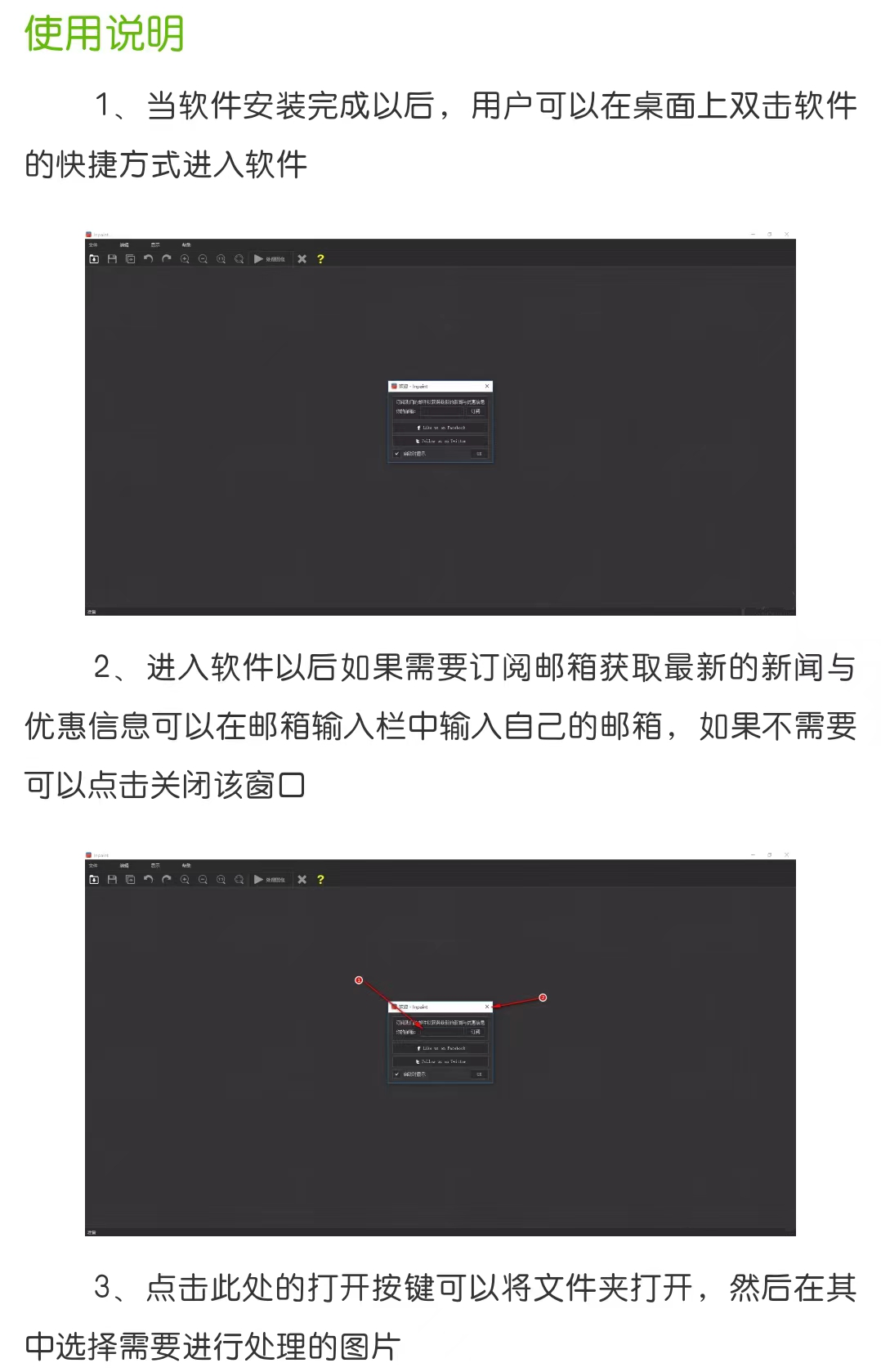
inpaint下载安装2024-inpaint软件安装包下载v5.0.6官网最新版附加详细安装步骤
Inpaint软件最新版是一款功能强大的图片去水印软件,这款软件拥有强大的智能算法,能够根据照片的背景为用户去除照片中的各种水印,并修补好去除水印后的图片。并且软件操作简单、界面清爽,即使是修图新手也能够轻松上手,…...

分享三个仓库
Hello , 我是恒。大概有半个月没有发文章了,都写在文档里了 今天分享三个我开源的项目,比较小巧但是有用 主页 文档导航 Github地址: https://github.com/lmliheng/document 在线访问:http://document.liheng.work/ 里面有各种作者书写的文档ÿ…...

MacOS - 启动台多了个『卸载 Adobe Photoshop』
问题描述 今天安装好了 Adobe Ps,但是发现启动台多了个『卸载 Adobe Photoshop』强迫症又犯了,想把它干掉! 解决方案 打开访达 - 前往 - 资源库,搜索要卸载的名字就可以看到,然后移除到垃圾筐...

PHP 日期处理完全指南
PHP 日期处理完全指南 引言 在PHP开发中,日期和时间处理是一个常见且重要的任务。PHP提供了丰富的内置函数来处理日期和时间,包括日期的格式化、计算、解析等。本文将详细介绍PHP中日期处理的相关知识,帮助读者全面理解和掌握这一技能。 1. PHP日期函数基础 1.1 date()函…...
KVB:怎么样选择最优交易周期?
摘要 在金融交易中,周期的选择是影响交易成败的重要因素之一。不同的交易周期对应不同的市场环境和交易策略,选择合适的周期可以提高交易的成功率。本文将详细探讨交易中如何选择最优周期,包括短周期、中周期和长周期的特点及适用情况&#…...

前端面试题日常练-day69 【面试题】
题目 希望这些选择题能够帮助您进行前端面试的准备,答案在文末 TypeScript中,以下哪个关键字用于声明一个变量的类型为联合类型? a) union b) any c) all d) | 在TypeScript中,以下哪个符号用于声明一个变量的类型为对象类型&am…...
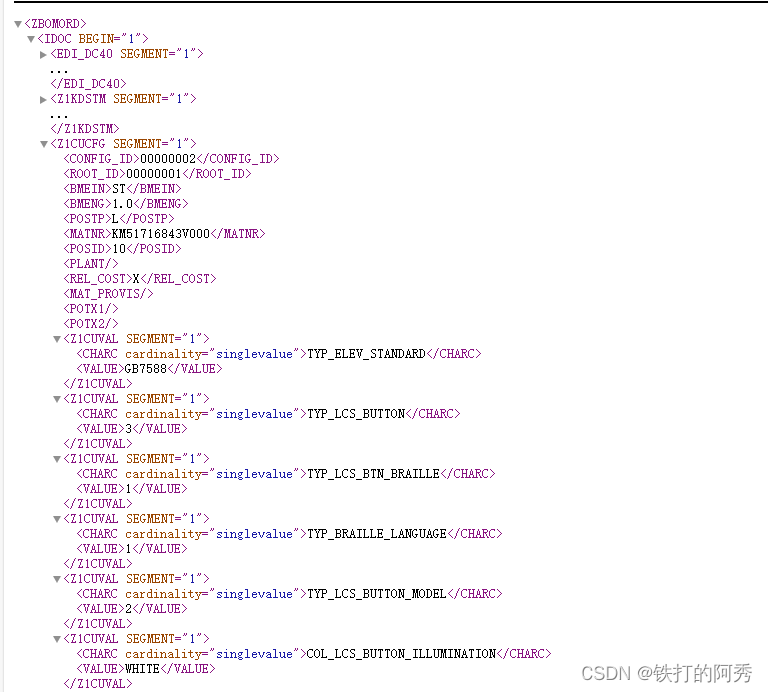
Java 解析xml文件-工具类
Java 解析xml文件-工具类 简述 Java解析xml文件,对应的Javabean是根据xml中的节点来创建,如SeexmlZbomord、SeexmlIdoc等等 工具类代码 import cn.hutool.core.io.FileUtil; import com.alibaba.cloud.commons.io.IOUtils; import com.seexml.bom.Se…...
PyQt5学习系列之新项目创建并使用widget
PyQt5学习系列之新项目创建并使用widget 前言报错新建项目程序完整程序总结 前言 新建项目,再使用ui转py,无论怎么样都打不开py文件,直接报错。 报错 Connected to pydev debugger (build 233.11799.298)新建项目程序 # Press ShiftF10 to…...
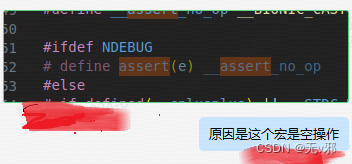
mtk8675 安卓端assert函数的坑
8675 安卓端, assert(pthread_mutex_init(&mutex_data_, &mattr) 0);用这行代码发现pthread_mutex_init函数没有被调用,反汇编发现不光没调用assert,pthread_mutex_init也没调用。直接pthread_mutex_init(&mutex_data_, &ma…...

编程入门笔记:从基础到进阶的探索之旅
编程入门笔记:从基础到进阶的探索之旅 编程,作为现代科技的基石,正日益渗透到我们生活的方方面面。对于初学者来说,掌握编程技能不仅有助于提升解决问题的能力,还能开启通往创新世界的大门。本篇文章将从四个方面、五…...

小规模自建 Elasticsearch 的部署及优化
本文将详细介绍如何在 CentOS 7 操作系统上部署并优化 Elasticsearch 5.3.0,以承载千万级后端服务的数据采集。要使用Elasticsearch至少需要三台独立的服务器,本文所用服务器配置为4核8G的ECS云服务器,其中一台作为 master + data 节点、一台作为 client + data 节点、最后一…...
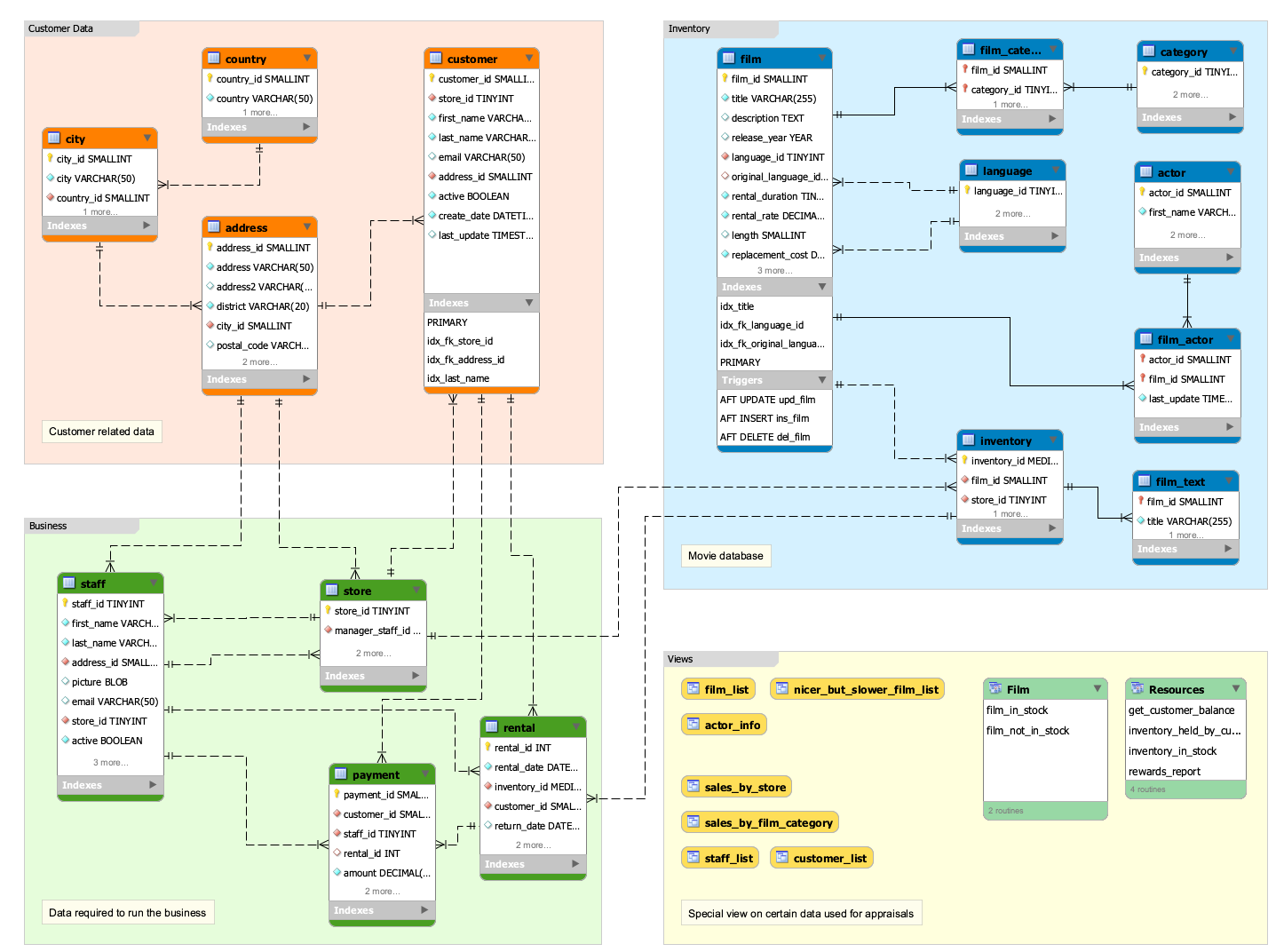
MySQL 示例数据库大全
前言: 我们练习 SQL 时,总会自己创造一些测试数据或者网上找些案例来学习,其实 MySQL 官方提供了好几个示例数据库,在 MySQL 的学习、开发和实践中具有非常重要的作用,能够帮助初学者更好地理解和应用 MySQL 的各种功…...
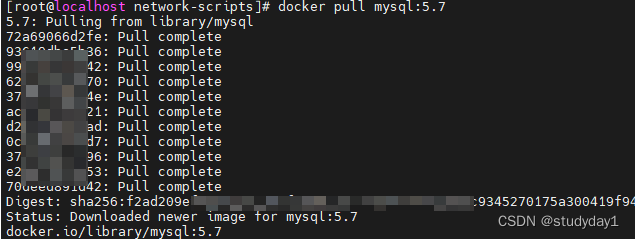
VirtualBox、Centos7下安装docker后pull镜像问题、ftp上传文件问题
Docker安装篇(CentOS7安装)_docker 安装 centos7-CSDN博客 首先,安装docker可以根据这篇文章进行安装,安装完之后,我们就需要去通过docker拉取相关的服务镜像,然后安装相应的服务容器,比如我们通过docker来安装mysql,…...

链表 题目汇总
237. 删除链表中的节点...

grafana连接influxdb2.x做数据大盘
连接influxdb 展示数据 新建仪表盘 选择存储库 设置展示...

Java证件识别中的身份证识别接口
现如今,越来越多的互联网应用需要对身份证进行实名认证,但不知道大家有没有发现,从最初的手动录入身份证信息转变到了现在的图片上传自动识别呢?其实,这都是因为集成了身份证识别接口功能,今天,…...

迷你小风扇哪个品牌好?迷你小风扇前十名公开揭晓!
随着夏日的炎热袭来,迷你小风扇成为了许多人随身携带的清凉利器。无论是在办公室、户外活动,还是在旅行途中,迷你小风扇都以其小巧便携、强劲风力和持久续航的优势,迅速俘获了大批用户的喜爱。然而,市面上迷你小风扇品…...
)
别再乱装CUDA了!用Anaconda为你的3060 Ti一键搞定PyTorch GPU环境(含CUDA 11.3实战)
3060 Ti显卡玩家的PyTorch环境配置指南:用Anaconda避开CUDA版本地狱 在深度学习领域,GPU加速已经成为提升模型训练效率的标配。然而,对于许多刚入门的开发者来说,配置PyTorch的GPU支持往往成为第一道门槛——尤其是当涉及到CUDA版…...

LLM Notebooks:从零构建RAG问答系统的实践指南
1. 项目概述:一个面向大语言模型实践的“笔记本”仓库最近在GitHub上闲逛,发现了一个挺有意思的仓库,叫qianniuspace/llm_notebooks。光看名字,llm_notebooks,大语言模型笔记本,这指向性就非常明确了。这大…...

Fast-GitHub:打破GitHub访问壁垒的智能加速方案
Fast-GitHub:打破GitHub访问壁垒的智能加速方案 【免费下载链接】Fast-GitHub 国内Github下载很慢,用上了这个插件后,下载速度嗖嗖嗖的~! 项目地址: https://gitcode.com/gh_mirrors/fa/Fast-GitHub 你是否曾因GitHub仓库克…...

5大优势解析:如何高效使用免费离线OCR工具
5大优势解析:如何高效使用免费离线OCR工具 【免费下载链接】Umi-OCR OCR software, free and offline. 开源、免费的离线OCR软件。支持截屏/批量导入图片,PDF文档识别,排除水印/页眉页脚,扫描/生成二维码。内置多国语言库。 项目…...

Go语言缓存雪崩:防止缓存失效
Go语言缓存雪崩:防止缓存失效 1. 雪崩防护 type CacheWithProtection struct {cache *RedisCachemu sync.Mutexlocks map[string]*sync.Mutex }func NewCacheWithProtection(cache *RedisCache) *CacheWithProtection {return &CacheWithProtect…...

深入解析go-containerregistry:无守护进程的容器镜像操作利器
1. 项目概述:容器镜像的“瑞士军刀”如果你在容器化这条路上已经走了一段时间,那么对“镜像”这个概念一定不会陌生。无论是 Docker Hub 上的nginx:latest,还是你公司私有仓库里的myapp:v1.2.3,这些镜像都是容器世界的基石。但你是…...

PCL2启动器离线登录按钮消失?5分钟快速修复指南
PCL2启动器离线登录按钮消失?5分钟快速修复指南 【免费下载链接】PCL Minecraft 启动器 Plain Craft Launcher(PCL)。 项目地址: https://gitcode.com/gh_mirrors/pc/PCL 你是否遇到过PCL2启动器离线登录按钮突然消失的困扰࿱…...

Kubernetes部署Valheim游戏服务器:云原生技术赋能游戏运维实践
1. 项目概述:当维京英灵殿遇上容器编排如果你和我一样,既沉迷于《英灵神殿》(Valheim)里与好友共建家园、挑战上古巨兽的乐趣,又恰好是一名整天和Kubernetes(k8s)打交道的开发者或运维ÿ…...

从零打造专业GitHub个人资料页:Markdown与动态集成实战指南
1. 项目概述与核心价值 在技术圈子里混了十几年,我越来越觉得,一个开发者的“数字门面”和代码能力同等重要。这个门面,很多时候就是你的GitHub主页。早些年,大家的GitHub个人页面就是个简单的仓库列表,加上一些贡献图…...
)
藏文语音生成准确率从61.2%跃升至94.8%:ElevenLabs Fine-tuning私有数据集构建全流程(含217小时母语者录音标注规范)
更多请点击: https://intelliparadigm.com 第一章:藏文语音生成技术演进与ElevenLabs适配挑战 藏文作为具有复杂音节结构、声调隐含性及丰富上下文依赖的黏着语系文字,其语音合成长期受限于高质量标注语料稀缺、音素-音节映射不唯一、以及缺…...