BEV 中 multi-frame fusion 多侦融合(一)
文章目录
- 参数设置
- align_dynamic_thing:为了将动态物体的点云数据从上一帧对齐到当前帧
- 流程
- 旋转函数
- 平移公式
- filter_points_in_ego:筛选出属于特定实例的点
- get_intermediate_frame_info: 函数用于获取中间帧的信息,包括点云数据、传感器校准信息、自车姿态、边界框及其对应的实例标识等
- intermediate_keyframe_align 函数用于将前一帧的点云数据对齐到当前帧的自车坐标系中,并返回对齐后的点云数据和标签。
- prev2ego 函数用于将前一帧的点云数据转换到当前帧的自车坐标系中。该函数考虑了旋转和平移,并可选地应用速度和时间差来进行额外的位移校正。
- nonkeykeyframe_align 函数用于将非关键帧的点云数据对齐到当前帧的自车坐标系中
- 将前一帧的点云数据对齐到当前帧的自车坐标系中
- 为未标记的中间点云数据搜索标签
必要的包
from nuscenes.nuscenes import NuScenes
from pyquaternion import Quaternion
from nuscenes.utils.data_classes import LidarPointCloud
import numpy as np
from open3d import *
from nuscenes.utils.data_io import load_bin_file
from nuscenes.utils.geometry_utils import points_in_box
import os.path as osp
from functools import partial
from utils.points_process import *
from sklearn.neighbors import KDTree
import open3d as o3d
import argparse
初始化全局字典,用于存储中间静态点、姿态和标签
INTER_STATIC_POINTS = {}
INTER_STATIC_POSE = {}
INTER_STATIC_LABEL = {}
参数设置
dataroot: 数据集的根路径,类型为字符串,默认值为 ‘./project/data/nuscenes/’。
- save_path: 保存路径,类型为字符串,默认值为 ‘./project/data/nuscenes//occupancy2/’,该参数是可选的。
- num_sweeps: 每个示例的激光雷达扫描次数,类型为整数,默认值为 10,该参数是可选的。
def parse_args():parser = argparse.ArgumentParser(description='Data converter arg parser')parser.add_argument('--dataroot',type=str,default='./project/data/nuscenes/',help='specify the root path of dataset')parser.add_argument('--save_path',type=str,default='./project/data/nuscenes//occupancy2/',required=False,help='specify sweeps of lidar per example')parser.add_argument('--num_sweeps',type=int,default=10,required=False,help='specify sweeps of lidar per example')args = parser.parse_args()return args
align_dynamic_thing:为了将动态物体的点云数据从上一帧对齐到当前帧
def align_dynamic_thing(box, prev_instance_token, nusc, prev_points, ego_frame_info):if prev_instance_token not in ego_frame_info['instance_tokens']:box_mask = points_in_box(box,prev_points[:3, :])return np.zeros((prev_points.shape[0], 0)), np.zeros((0, )), box_maskbox_mask = points_in_box(box,prev_points[:3, :])box_points = prev_points[:, box_mask].copy()prev_bbox_center = box.centerprev_rotate_matrix = box.rotation_matrixbox_points = rotate(box_points, np.linalg.inv(prev_rotate_matrix), center=prev_bbox_center)target = ego_frame_info['instance_tokens'].index(prev_instance_token)ego_boxes_center = ego_frame_info['boxes'][target].centerbox_points = translate(box_points, ego_boxes_center-prev_bbox_center)box_points = rotate(box_points, ego_frame_info['boxes'][target].rotation_matrix, center=ego_boxes_center)box_points_mask = filter_points_in_ego(box_points, ego_frame_info, prev_instance_token)box_points = box_points[:, box_points_mask]box_label = np.full_like(box_points[0], nusc.lidarseg_name2idx_mapping[box.name]).copy()return box_points, box_label, box_mask流程
-
检查实例标识:
if prev_instance_token ∉ ego_frame_info[‘instance_tokens’]:
box_mask = points_in_box(box, prev_points[:3, :])
return (0, 0, box_mask) -
计算边界框内的点:
box_mask = points_in_box(box, prev_points[:3, :])
box_points = prev_points[:, box_mask] -
获取上一帧边界框的中心和旋转矩阵:
C_prev = box.center
R_prev = box.rotation_matrix -
将点旋转到原点并平移到当前帧的中心:
box_points = R_prev^-1 * (box_points - C_prev) -
获取目标边界框的中心和旋转矩阵:
target = ego_frame_info[‘instance_tokens’].index(prev_instance_token)
C_ego = ego_frame_info[‘boxes’][target].center
R_ego = ego_frame_info[‘boxes’][target].rotation_matrix -
平移到当前帧的中心并再次旋转:
box_points = box_points + (C_ego - C_prev)
box_points = R_ego * box_points -
过滤当前帧边界框内的点:
box_points_mask = points_in_box(ego_frame_info[‘boxes’][target], box_points[:3, :])
box_points = box_points[:, box_points_mask] -
生成点云数据的标签:
box_label = full_like(box_points[0], nusc.lidarseg_name2idx_mapping[box.name]) -
返回结果:
return (box_points, box_label, box_mask)
numpy.full_like()是根据现有数组的形状和数据类型来创建新数组,而numpy.full()则需要手动指定形状和数据类型。
旋转函数
def rotate(points, rot_matrix: np.ndarray, center=None) -> np.array:"""Applies a rotation.:param rot_matrix: <np.float: 3, 3>. Rotation matrix."""if center is not None:points[:3, :] = np.dot(rot_matrix, points[:3, :]-center[:, None]) + center[:, None]else:points[:3, :] = np.dot(rot_matrix, points[:3, :])return points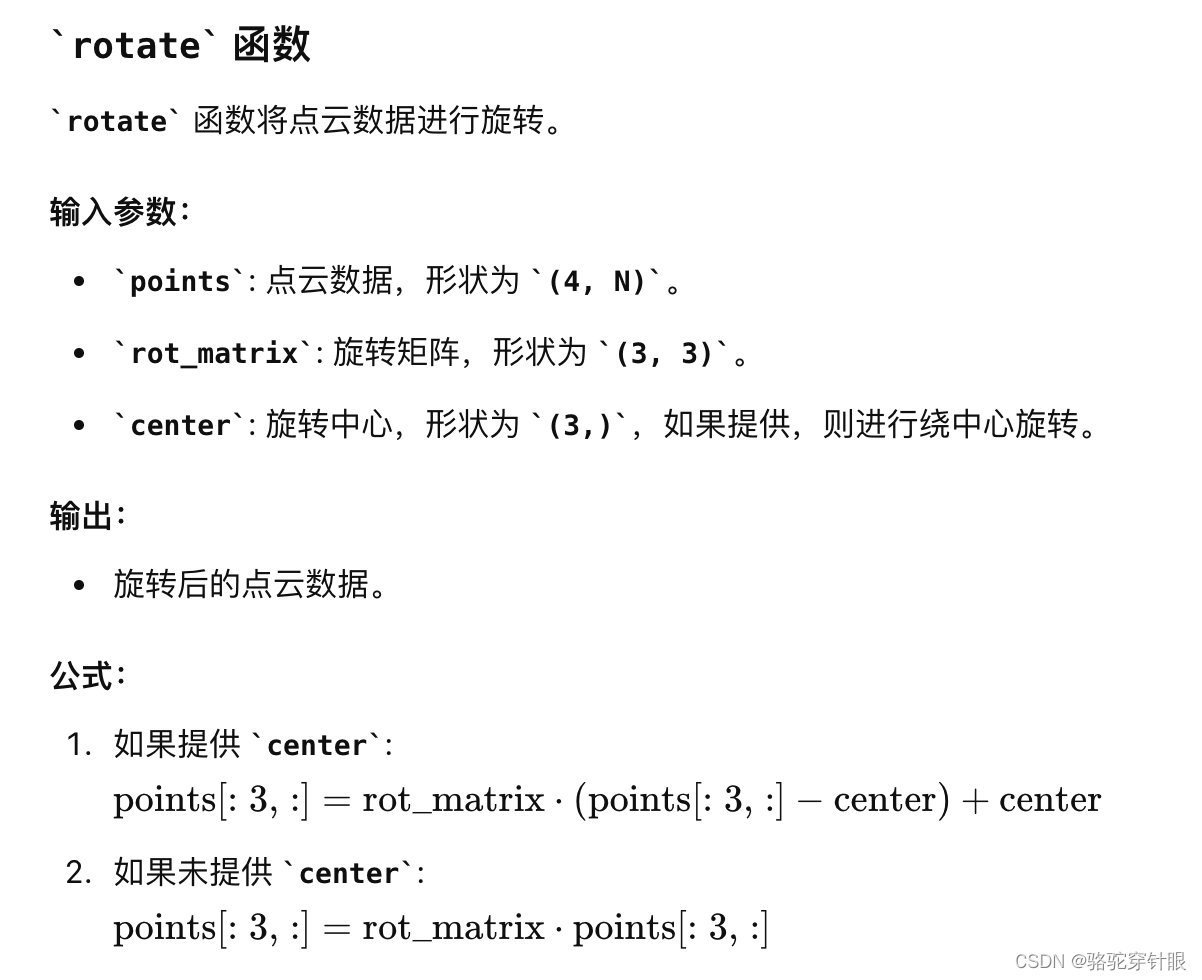
平移公式
def translate(points, x: np.ndarray) -> np.array:"""Applies a translation to the point cloud.:param x: <np.float: 3, 1>. Translation in x, y, z."""for i in range相关文章:
BEV 中 multi-frame fusion 多侦融合(一)
文章目录 参数设置align_dynamic_thing:为了将动态物体的点云数据从上一帧对齐到当前帧流程旋转函数平移公式filter_points_in_ego:筛选出属于特定实例的点get_intermediate_frame_info: 函数用于获取中间帧的信息,包括点云数据、传感器校准信息、自车姿态、边界框及其对应…...

“Docker操作案例实践“
目录 1. 下载nginx 2. Portainer可视化 1. 下载nginx 步骤: 搜索nginx:docker search nginx;下载镜像:docker pull nginx ;查看镜像:docker images ;后台运行 :docker run -d -na…...
Redis 管道
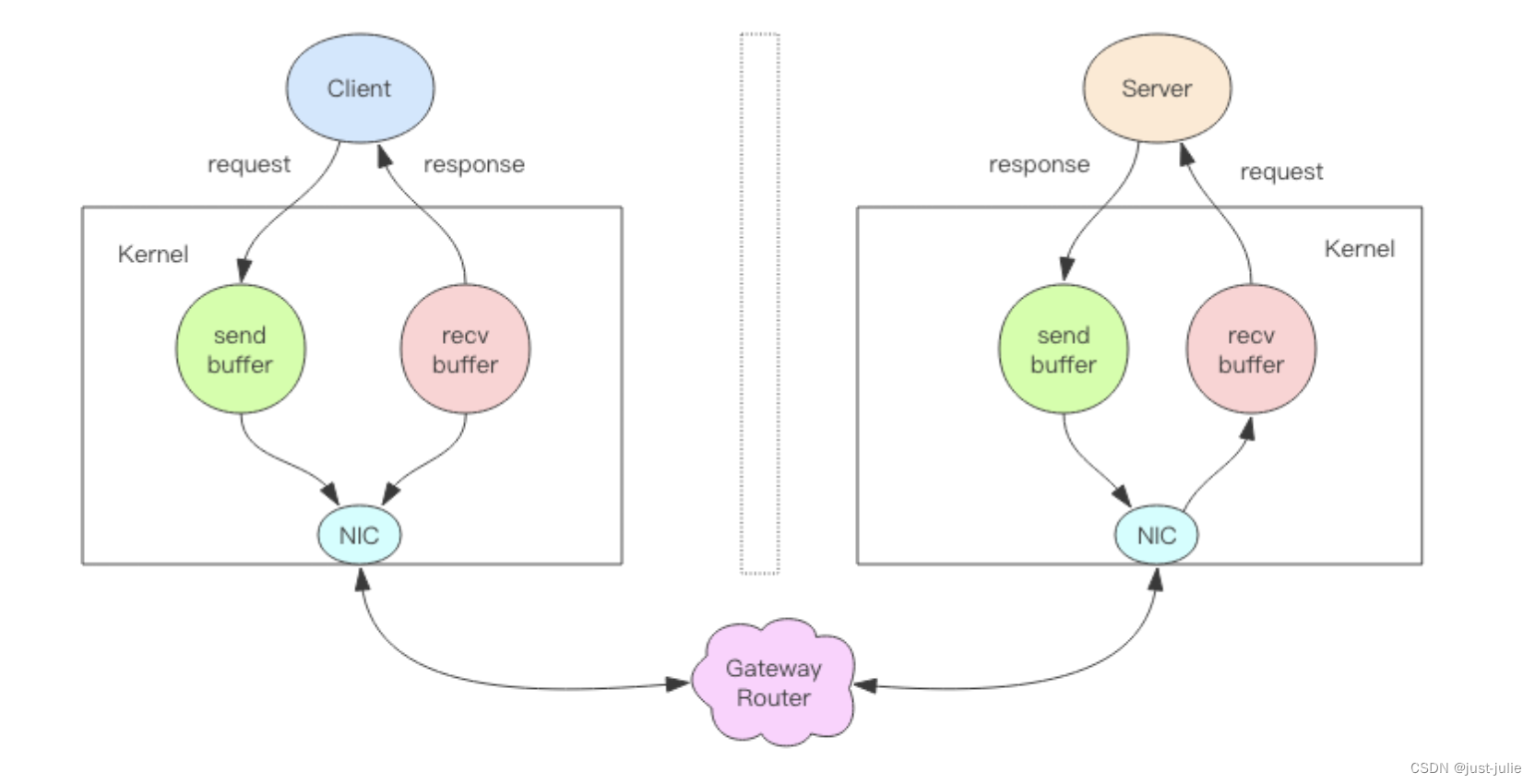
Redis的消息交互 当我们使用客户端对Redis进行一次操作时,如下图所示,客户端将请求传送给服务器,服务器处理完毕后,再将响应回复给客户端,这要花费一个网络数据包来回的时间。 如果连续执行多条指令,那就会…...

ubuntu20.04安装配置openMVG+openMVS
安装 主要跟着官方教程逐步安装 openMVG https://github.com/openMVG/openMVG/blob/master/BUILD.md openMVS https://github.com/cdcseacave/openMVS/wiki/Building 注意事项 1. 库版本要求 使用版本: openMVS 2.2.0 openMVG Eigen 3.4.0 OpenCV 4.6.0 Ce…...

使用CSS常见问题解答卡片
常见问题解答卡片 效果展示 CSS 知识点 CSS 选择器的使用background 渐变背景色运用CSS 综合知识运用 页面整体布局 <div class"container"><h1>经常问的问题</h1><!-- 这里只是展示一个项目 --><div class"tab"><in…...

Kong AI Gateway 正式 GA !
Kong Gateway 3.7 版本已经重磅上线,我们给 AI Gateway 带来了一系列升级,下面是 AI Gateway 的更新亮点一览。 AI Gateway 正式 GA 在 Kong Gateway 的最新版本 3.7 中,我们正式宣布 Kong AI Gateway 达到了通用可用性(GA&…...
HTML5有哪些新特性?
目录 1.语义化标签:2.多媒体支持:3.增强型表单:4.绘图与图形:5.地理定位:6.离线应用与存储:7.性能与集成:8.语义化属性:9.改进的 DOM 操作:10.跨文档通信:11.…...
SQL Server入门-SSMS简单使用(2008R2版)-2
环境: win10,SQL Server 2008 R2 参考: SQL Server 管理套件(SSMS)_w3cschool https://www.w3cschool.cn/sqlserver/sqlserver-oe8928ks.html SQL Server存储过程_w3cschool https://www.w3cschool.cn/sqlserver/sql…...

php实现modbus CRC校验
一:计算CRC校验函数 function calculateCRC16Modbus($string) {$crcBytes [];for ($i 0; $i < strlen($string); $i 2) {$crcBytes[] hexdec(substr($string, $i, 2));}$crc 0xFFFF;$polynomial 0xA001; // This is the polynomial x^16 x^15 x^2 1fo…...

2025年计算机毕业设计题目参考
今年最新计算机毕业设计题目参考 以下可以参考 springboot洗衣店订单管理系统 springboot美发门店管理系统 springboot课程答疑系统 springboot师生共评的作业管理系统 springboot平台的医疗病历交互系统 springboot购物推荐网站的设计与实现 springboot知识管理系统 springbo…...

ERP、CRM、SRM、PLM、HRM、OA……都是啥意思?
经常会听说一些奇怪的系统或平台名称,例如ERP、CRM、SRM、PLM、HRM、OA等。 这些系统,都是干啥用的? █ ERP(企业资源计划) 英文全称:Enterprise Resource Planning 定义:由美国Gartner Gro…...
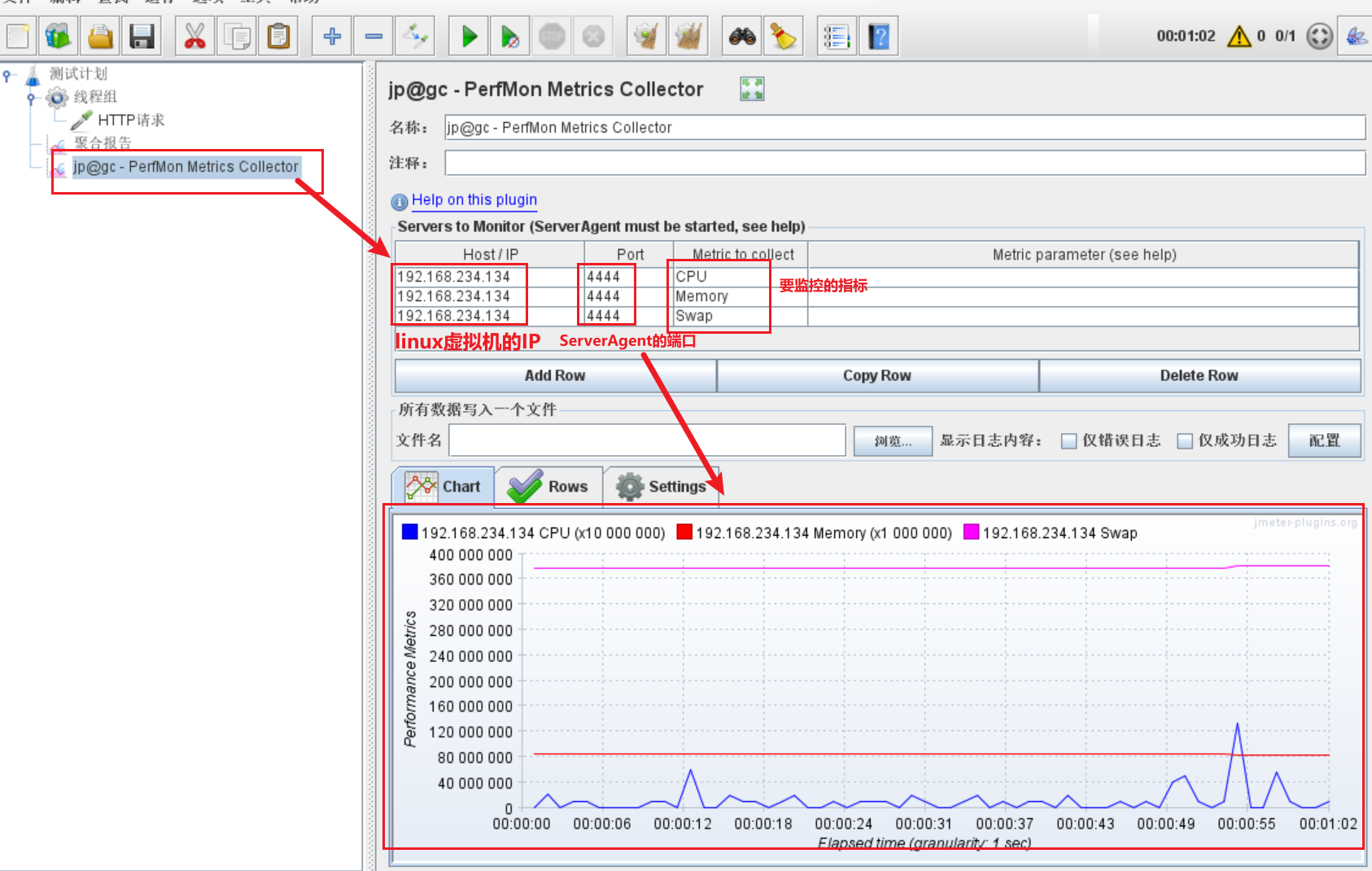
Jmeter分布式、测试报告、并发数计算、插件添加方式、常用图表
Jmeter分布式 应用场景 当单个测试机无法模拟用户要求的业务场景时,可以使用多台测试机进行模拟,就是Jmeter的分布 式测试。 Jmeter分布式执行原理 Jmeter分布测试时,选择其中一台作为控制机(Controller),…...

3D三维模型展示上传VR全景创建H5开源版开发
3D三维模型展示上传VR全景创建H5开源版开发 新增三级分类(项目分类、项目、默认场景) 新增热点 前台创建项目、场景 场景跳转、提示信息 新增热点图标选择 新增预览场景是显示关联场景 新增3D模型展示功能 当然可以!以下是一个关于3D三维模…...

js中!emailPattern.test(email) 的test是什么意思
test 是 JavaScript 正则表达式(RegExp)对象的方法之一,用于测试一个字符串是否与正则表达式匹配。正则表达式是一种用于匹配字符串的模式,通常用于验证输入数据、查找和替换文本等。 使用 test 方法 test 方法语法如下…...
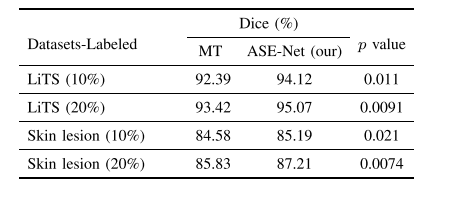
半监督医学图像分割:基于对抗一致性学习和动态卷积网络的方法| 文献速递-深度学习结合医疗影像疾病诊断与病灶分割
Title 题目 Semi-Supervised Medical Image Segmentation Using Adversarial Consistency Learning and Dynamic Convolution Network 半监督医学图像分割:基于对抗一致性学习和动态卷积网络的方法 01 文献速递介绍 医学图像分割在计算辅助诊断和治疗研究中扮演…...

Scikit-Learn支持向量机回归
Scikit-Learn支持向量机回归 1、支持向量机回归1.1、最大间隔与SVM的分类1.2、软间隔最大化1.3、支持向量机回归1.4、支持向量机回归的优缺点2、Scikit-Learn支持向量机回归2.1、Scikit-Learn支持向量机回归API2.2、支持向量机回归初体验2.3、支持向量机回归实践(加州房价预测…...

ElasticSearch的桶聚合
桶聚合 在前面几篇博客中介绍的聚合指标是指符合条件的文档字段的聚合,有时还需要根据某些维度进行聚合。例如在搜索酒店时,按照城市、是否满房、标签和创建时间等维度统计酒店的平均价格。这些字段统称为“桶”,在同一维度内有一个或者多个桶。例如城市桶,有“北京”、“天…...
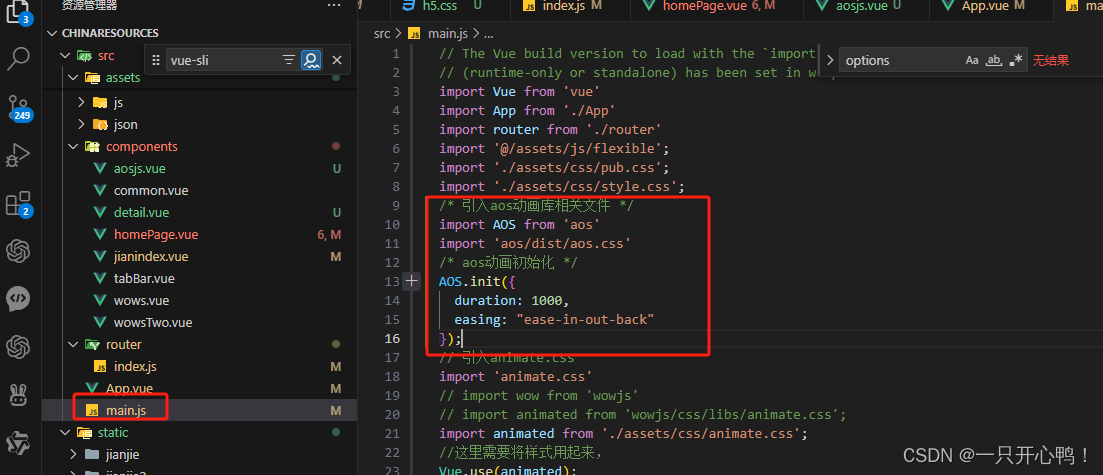
vue引入aos.js实现滚动动画
aos.js官方网站:http://michalsnik.github.io/aos/ aos.js介绍 AOS (Animate on Scroll) 是一个轻量级的JavaScript库,用于实现当页面元素随着用户滚动进入可视区域时触发动画效果。它不需要依赖 jQuery,可以很容易地与各种Web开发框架&#…...

python+selenium之点击元素报错:‘NoneType‘ object has no attribute ‘click‘
今日遇到一个很奇怪的问题 case1:当使用顺序结构直接从登录到点击页面菜单,则可以正常点击菜单 case2:若把登录分离开,采用封装的方法点击菜单则会提示:‘NoneType’ object has no attribute ‘click’ 具体页面如下,…...

Web 品质国际化
Web 品质国际化 随着互联网的普及和全球化的推进,Web品质国际化已成为现代企业发展的必然趋势。Web品质国际化不仅仅是网站的多语言支持,更是一种全面的文化、技术和市场适应性的体现。本文将探讨Web品质国际化的概念、重要性以及实施策略。 一、Web品质国际化的概念 Web品…...

Source Han Serif CN:企业级开源字体终极实战指南
Source Han Serif CN:企业级开源字体终极实战指南 【免费下载链接】source-han-serif-ttf Source Han Serif TTF 项目地址: https://gitcode.com/gh_mirrors/so/source-han-serif-ttf 在当今数字化时代,企业面临字体选择的两难困境:商…...
深入Transformer内部:LoRA到底改动了哪部分权重才让模型“学会”新任务?
深入Transformer内部:LoRA如何通过低秩更新重塑大模型能力 在自然语言处理领域,大型预训练模型的微调一直是个计算密集型任务。传统全参数微调需要更新数十亿甚至数千亿参数,这对大多数研究者和企业来说都是难以承受的负担。低秩适应(LoRA)技…...

Qdrant客户端库实战:从向量数据库连接到生产级应用开发
1. 项目概述:从向量数据库到应用落地的桥梁如果你最近在折腾大模型应用,或者想给自己的产品加上一个“智能大脑”,那你大概率绕不开一个词:向量数据库。简单来说,它就像一个能理解“意思”的超级搜索引擎,不…...

JetBrains IDE试用期重置终极指南:3种简单方法实现30天无限续杯
JetBrains IDE试用期重置终极指南:3种简单方法实现30天无限续杯 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 你是否在使用IntelliJ IDEA、PyCharm、WebStorm等JetBrains IDE时遇到过试用期突然结束…...

湿版摄影×AI生成革命:为什么93%的MJ用户调不出真实碘化银斑痕?——资深暗房师+AI训练师双视角深度拆解
更多请点击: https://intelliparadigm.com 第一章:湿版摄影AI生成革命:为什么93%的MJ用户调不出真实碘化银斑痕?——资深暗房师AI训练师双视角深度拆解 湿版火棉胶摄影术诞生于1851年,其不可复制的物理噪点——由碘化…...

Claw框架数据库迁移工具claw-migrate:原理、实践与团队协作指南
1. 项目概述:一个专为Claw设计的迁移工具最近在折腾一个叫Claw的开源项目,它本身是一个轻量级的Web框架,用起来挺顺手。但项目迭代过程中,难免会遇到数据库结构变更、数据迁移这类“脏活累活”。手动写SQL脚本?太原始&…...

基于MCP与Apify构建AI驱动的投资另类数据研究工具
1. 项目概述:当投资研究遇上AI代理如果你是一名量化研究员、对冲基金分析师,或者只是一个对金融市场充满好奇、希望用数据驱动决策的独立投资者,那么你肯定对“另类数据”这个词不陌生。传统的财报、股价、宏观经济指标,这些“传统…...

如何永久保存你的微信聊天记录?WeChatExporter开源工具完整指南
如何永久保存你的微信聊天记录?WeChatExporter开源工具完整指南 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾经历过手机丢失、微信重装后珍贵聊天…...

Arm Neoverse CMN-700性能监控与优化实践
1. Arm Neoverse CMN-700性能监控体系解析在现代多核处理器架构中,性能监控单元(PMU)如同系统的"听诊器",能够实时捕捉微架构层面的各种行为指标。Arm Neoverse CMN-700作为面向基础设施级应用的互联架构,其PMU设计尤其强调对Mesh网…...

30亿条出行记录解密:如何用纽约出租车数据洞察城市脉搏 [特殊字符][特殊字符]
30亿条出行记录解密:如何用纽约出租车数据洞察城市脉搏 🚖📊 【免费下载链接】nyc-taxi-data Import public NYC taxi and for-hire vehicle (Uber, Lyft) trip data into a PostgreSQL or ClickHouse database 项目地址: https://gitcode.…...