具身智能特点及实现路线
多模态——多功能的“小脑”
人类具有眼耳鼻舌身意,说明对于物理世界的充分感知和理解,是意识和智慧的来源。而传统AI更多的是被动观测,主要是“看”(计算机视觉)和“读”(文本NLP),这就使得智能体Agent缺乏对外部环境的通用感知能力。
多模态大模型,可以积累和分析2D/3D视觉、LiDAR激光、Voice声音等多维信息,基于真实交互,为具身大模型积累高质量数据,深度理解并转化为机器指令,来控制机器人的行为。有了感知能力更丰富的“小脑”,具身智能自然也就能更好地理解物理世界。
具身智能——精准决策和执行的“躯干”
传统的机器人训练往往采取离线模式,一旦遇到训练环境中没有出现过的问题,就可能掉链子,需要收集数据再重新迭代优化,这个过程的效率很低,也减慢了具身智能在现实中落地的速度。
大模型时代,具身智能模型的训练与测试,与云服务相结合,可以在云上虚拟仿真场景下进行端到端的实时训练与测试,快速完成端侧迭代与开发,这就大大加速了具身智能体的进化速度。
具身智能体在模拟出来的场景中无数次地尝试、学习、反馈、迭代,积累对物理世界的深度理解,产生大量交互数据,再通过与真实环境的不断交互积累经验,全面提升在复杂世界的自动移动、复杂任务的泛化能力,展现在具身载体上,就是机器人可以更好地适应环境,更灵活地运用机械“躯干”来进行人机交互。
技术实现路线
目前,对具身智能的技术实践,主要以两种路线为主:
1. 以谷歌、伯克利等为代表的“未来派”,期望“一步到位”。
他们从具身智能的终极目标出发,希望从当下到终点,寻找一个端到端的技术路径,即给出一个大模型就能让机器人完成识别环境、分解任务、执行操作等所有工作,非常难,也非常有未来感。
谷歌DeepMind提出的机器人模型Robotics Transformer 2(RT-2)就是一个全新的视觉-语言-动作(VLA)模型,它从网络和机器人数据中学习,并将这些知识转化为机器人控制的通用指令,同时保留了web-scale能力。即一个在web-scale数据上进行预训练的视觉-语言模型(VLM)正在从RT-1的机器人数据中学习,以成为可以控制机器人的视觉-语言-动作(VLA)模型,RT-2。
加州大学伯克利分校的LM Nav,则通过视觉模型、语言模型、视觉语言模型 CLIP等三个大模型,让机器人在不看地图的情况下按照语言指令到达目的地。Koushil Sreenath教授的工作,就是推动硬件本体、运动小脑、决策大脑三部分逐渐融合,让各种四足、双足,以及人形机器人在真实世界中灵活地运动。
2. 以英伟达及大量工业机器人厂商为代表的“务实派”,期望“马上见效”。
简单来说,就是不同任务通过不同模型来实现,分别让机器人学习概念并指挥行动,把所有的指令分解执行,通过大模型来完成自动化调度和协作,比如语言大模型来学习对话、视觉大模型来识别地图、多模态大模型来完成肢体驱动。
这种方式虽然底层逻辑上看还是比较机械,不像人一样有综合智能,但成本和可行性上,能让具身智能更快落地。
相关文章:
具身智能特点及实现路线
多模态——多功能的“小脑” 人类具有眼耳鼻舌身意,说明对于物理世界的充分感知和理解,是意识和智慧的来源。而传统AI更多的是被动观测,主要是“看”(计算机视觉)和“读”(文本NLP),…...

重温react-04
兄弟组件之间通信 兄弟1 import React, { Component } from react import pubsub from ./pubsub export default class learnReact01 extends Component {render() {return (<div>我是兄弟1<button onClick{this.clickMessage}>向兄弟2发信息</button><…...
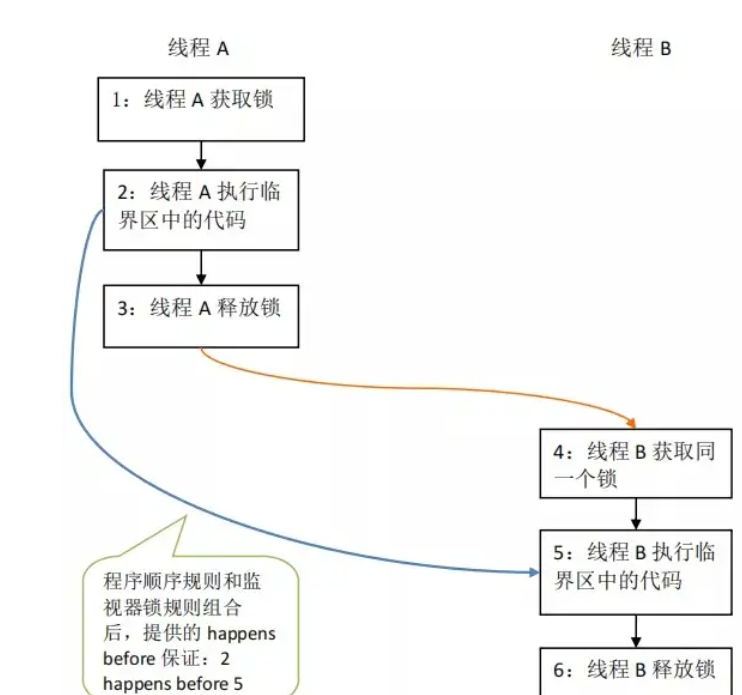
lock-锁的概念
锁的简介 锁是计算机协调多个进程或线程并发访问某一资源的机制(避免发生资源争抢) 在并发环境下,多个线程会对同一个资源进行争抢,可能会导致数据不一致的问题。为了解决这一问题,需要通过一种抽象的锁来对资源进行…...
Docker 可用镜像源
当使用 docker 发现拉取不到镜像时,可以编辑 /etc/docker/daemon.json 文件,添加如下内容: 这文章不涉及政治,不涉及敏感信息,三番五次的审核不通过,一删再删,只好换图片了。 重新加载服务配置…...

MySQL 搭建主从报错 1236
错误信息: Last_IO_Error: Got fatal error 1236 from source when reading data from binary log: Could not find first log file name in binary log index file 大致内容: MySQL 在尝试从二进制日志(binary log)中读取数据…...

华为OD机试真题2024版-求幸存数之和
题目描述\n给一个正整数列 nums,一个跳数 jump,及幸存数量 left。运算过程为:从索引为 0 的位置开始向后跳,中间跳过 J 个数字,命中索引为 J+1 的数字,该数被敲出,并从该点起跳,以此类推,直到幸存 left 个数为止。然后返回幸存数之和。\n约束: 1、0 是第一个起跳点。…...

Python - 各种计算器合集【附源码】
计算器合集 一:极简版计算器二:简易版计算器三:不简易的计算器四:还可以计算器 一:极简版计算器 运行效果: import tkinter as tk import tkinter.messagebox win tk.Tk() win.title("计算器")…...

【已解决】better-scroll在PC端如何开启鼠标滚动以及如何始终显示滚动条
总结 需要安装插件 mouse-wheel 和 scrollbar 在PC端如何开启鼠标滚动? 需要安装官方提供的滚动插件:mouse-wheel https://better-scroll.github.io/docs/zh-CN/plugins/mouse-wheel.html 为了开启鼠标滚动功能,你需要首先引入 mouseWheel 插件&…...

AJAX 综合案例-day2
Bootstrap 弹框 功能:不离开当前页面,显示单独内容,供用户操作 步骤: 1. 引入 bootstrap.css 和 bootstrap.js 2. 准备 弹框标签 ,确认结构 3. 通过 自定义属性 ,控制弹框的 显示 和 隐藏 1. 通过属性…...

【Esp32连接微信小程序蓝牙】附Arduino源码《 返回10007 相同特征id冲突问题》
前言 最近接了一个外包,发现了esp32连接小程序会有很多bug,所以接下来会慢慢更新解决方案,还是需要多接触项目才能进步呀兄弟们! 附上uuid的生成链接: // See the following for generating UUIDs: // https://www.uu…...

并发控制技术
事物的隔离性实现主要依赖于多种并发控制技术,这些技术确保在并发执行的事物中,一个事物的操作不会被其他事物干扰。并发控制技术按照其对可能冲突的操作采取的不同策略可以分为乐观并发控制和悲观并发控制两大类。 基于封锁的并发控制 对于并发可能冲突的操作,比如读-写,…...

什么是网段
一、A类地址的网段: 情况1:最小的网段就是xxx.0.0.0,直接使用第一段的网络地址做网段。 情况2:如果希望网段允许的主机数量的范围缩小,扩大网段值即可,xxx.xxz.zzz.zzz,比如xxx.xxx.xzz.zzz&…...
PHP和Mysql前后端交互效果实现
一、连接数据库基本函数 mysqli_connect(); 作用:创建数据库连接,打开一个新的mysql的连接。传参顺序:数据库地址、数据库账号、数据库密码 <?phpecho mysqli_connect("localhost",root,root) ?> /*结果:F…...
vue小总结
知识总结 【 1 】es6 语法总结 # let 定义变量 # const定义常量 ------块级作用域---- # var 以后尽量少用,函数作用域var 在 JavaScript 中是函数作用域或全局作用域。而 let 和 const 是块级作用域。 // 使用 var 声明全局变量 var globalVar "Im a globa…...

RapidLayout:中英文版面分析推理库
引言 继上一篇文章之后,我这里想着将360发布的版面分析模型整合到现有的rapid_layout仓库中,便于大家快速使用。 不曾想到,我这整理工作越做越多了,好在整体都是往更好方向走。 起初,rapid_layout项目是在RapidStru…...

postman 工具下载安装使用教程_postman安装
本文讲解的是postman工具下载、Postman安装步骤、postman下载、postman安装教程。Postman是一款流行的API测试工具,它提供了一个用户友好的界面,用于发送和测试API请求,并且可以轻松地按需管理和组织请求。 这使得开发人员和测试人员能够更高…...
【数学建模】——【新手小白到国奖选手】——【学习路线】
专栏:数学建模学习笔记 目录 编辑 第一阶段:基础知识和工具 1.Python基础 1.学习内容 1.基本语法 2.函数和模块 3.面向对象编程 4.文件操作 2.推荐资源 书籍: 在线课程: 在线教程: 2.数学基础 1.学习内…...
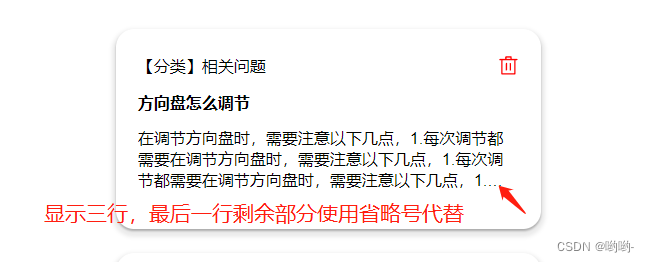
CSS文本超限后使用省略号代替
方案一: 只显示一行,超限后使用省略号代替 .detail {overflow: hidden;text-overflow: ellipsis;white-space: nowrap; }方案二: 显示多行,到最后一行还没有显示完,则最后一行多出来的部分使用省略号代替。 .detai…...

多线程下JVM内存模型 和 volatile关键字
1、线程的概念 线程(thread)是操作系统能够进行运算调度的最小单位。它被包含在进程之中,是进程中的实际运作单位。一条线程指的是进程中一个单一顺序的控制流,一个进程中可以并发多个线程,每条线程并行执行不同的任务…...

Uniapp实现页面滚动Tab吸顶,点击tab内容滚动到对应tab内容位置
思路:运用uniapp原生提供方法uni.createSelectorQuery()获取滚动对应节点的信息,即节点距离页面顶部的距离,再通过uniapp原生监听页面滚动事件onPageScroll,获取页面内容滚动的高度,二者相加即定位到对应节点的滚动距离…...

ngx_http_create_request
1 定义 ngx_http_create_request 函数 定义在 ./nginx-1.24.0/src/http/ngx_http_request.cngx_http_request_t * ngx_http_create_request(ngx_connection_t *c) {ngx_http_request_t *r;ngx_http_log_ctx_t *ctx;ngx_http_core_loc_conf_t *clcf;r ngx_http_…...

高速SerDes设计中BER预测的智能应力输入方法
1. 高速串行链路设计中的BER预测挑战在当今高速数字系统设计中,SerDes(串行器/解串器)技术已成为主流接口方案,数据传输速率已突破10Gbps大关。随着速率提升,信号完整性(SI)问题日益突出,其中误码率(BER)预…...
研究(Matlab代码实现))
【CPO三维路径规划】豪猪算法CPO多无人机协同集群避障路径规划(目标函数:最低成本:路径、高度、威胁、转角)研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
)
第六届机械制造与智能控制国际学术会议(ICMMIC 2026)
第六届机械制造与智能控制国际学术会议(ICMMIC 2026)将于2026年6月12-14日在中国浙江湖州隆重举行。本次会议旨在汇聚全球“机械制造、智能控制”领域的学者、专家、研发者和技术人员,共同探讨学术前沿,分享科研成果,促…...

多目标粒子群混合储能优化配置【附算法】
✨ 长期致力于混合储能、优化配置、风光互补微电网、多目标粒子群算法、CRITIC-TOPSIS研究工作,擅长数据搜集与处理、建模仿真、程序编写、仿真设计。 ✅ 专业定制毕设、代码 ✅ 如需沟通交流,点击《获取方式》 (1)风光-负荷多场景…...

Fawkes踩过的坑以及如何解决非常详细
首先我是用anaconda创建的一个虚拟环境 fawkes_env后续的所有操作都是在该环境中实现 不使用anaconda 可直接看第一步 坑:直接用 conda create -n fawkes python3.9 后,pip install -e . 可能因为 TensorFlow 版本过新导致不兼容(Keras 2.3…...

Windows安卓子系统终极指南:从基础配置到专业开发全流程
Windows安卓子系统终极指南:从基础配置到专业开发全流程 【免费下载链接】WSA Developer-related issues and feature requests for Windows Subsystem for Android 项目地址: https://gitcode.com/gh_mirrors/ws/WSA 想要在Windows 11上无缝运行安卓应用吗&…...

爆单实操课:从3C到美妆,跨境商家如何用AI神器搞定TikTok本土化
每天都有无数跨境卖家在各大社群里发问:怎么用ai生成带货视频,有哪些工具比较好用? 在 TikTok 这个极度依赖内容爆发的平台上,不同类目的产品对视频素材的需求千差万别。靠人工剪辑不仅效率低,且极难跨越本土化语言的障…...

自然语言编写嵌入式软件之点亮LED灯
要实现的功能: 控制LED以10HZ的频率闪烁 传统实现过程:学C语言,看数据手册了解MCU,学教程,copy代码,学编译调试环境,学仿真,学用仪器测量 自然语言编程实现过程: 搭建…...

通过curl命令直接测试Taotoken聊天补全接口的配置与排错方法
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过curl命令直接测试Taotoken聊天补全接口的配置与排错方法 对于开发者而言,在集成大模型API时,直接使用c…...