3、matlab单目相机标定原理、流程及实验
1、单目相机标定流程及步骤
单目相机标定是通过确定相机的内部和外部参数,以便准确地在图像空间和物体空间之间建立映射关系。下面是单目相机标定的流程及步骤:
- 搜集标定图像:使用不同角度、距离和姿态拍摄一组标定图像,并确保标定板(可以是棋盘格或者圆形标定板)完整可见。
- 提取标定板角点:使用相机标定软件或者编程工具,对标定图像进行处理,提取出标定板上的角点位置。
- 生成标定板坐标系:将标定板的实际尺寸和布置方式输入到标定软件中,生成标定板的物体坐标系。
- 相机标定:使用标定板提取的角点位置和物体坐标系的信息,计算相机的内部参数(焦距、主点位置)和外部参数(旋转矩阵、平移向量)。
- 评估标定结果:通过重投影误差等指标评估相机标定的准确性,可以进行误差分析和加以改进。
- 应用标定参数:将标定得到的相机参数应用到实际场景中,用于目标检测、测距、摄像头校正等应用。
通过以上流程和步骤,可以有效地对单目相机进行标定,提高图像处理和计算机视觉的准确性和可靠性。
2、张正友标定法原理
张正友标定法(Zhang's Camera Calibration Method)是一种常用的相机标定方法,通过使用棋盘格标定板进行相机标定,得到相机的内部和外部参数。该方法由姚林德和张正友在1999年提出,被广泛应用于计算机视觉和机器视觉领域。其原理主要包括以下几个步骤:
- 拍摄图像:在不同角度和位置下使用相机拍摄多张包含棋盘格标定板的图像。
- 棋盘格角点提取:对拍摄的图像进行处理,提取出棋盘格上的角点位置。
- 棋盘格三维坐标计算:根据棋盘格的实际尺寸,计算出棋盘格上角点的三维坐标。
- 相机内部参数优化:使用非线性最小二乘法优化相机的内部参数,包括焦距、主点位置、径向畸变和切向畸变等。
- 相机外部参数计算:根据棋盘格角点的图像坐标和三维坐标,计算相机的外部参数,包括旋转矩阵和平移向量。
- 重投影误差优化:通过最小化重投影误差来优化相机内外参数,使得图像空间和物体空间之间的映射关系更准确。
- 评估标定结果:评估标定结果的准确性和稳定性,可以通过畸变校正、相机校正等方法对相机进行修正和补偿。
通过以上步骤,张正友标定法可以得到相机的准确内外参数,并且能够有效消除图像中的畸变,提高相机标定的精度和稳定性。
3、张正友标定法理论推导过程
张正友标定法的公式推导过程主要包括以下几个步骤:
1)单张图像成像模型:首先根据针孔相机模型,可以得到单张图像中一个角点的成像坐标和物体坐标之间的关系。设相机内参矩阵为K,外参矩阵为[R∣T],则可以得到单个角点的成像坐标u,v

2)多张图像标定:通过多张图像中多个角点的成像和物体坐标关系,可以建立成像坐标和物体坐标之间的映射关系。通过对多个角点的成像坐标和物体坐标进行整体优化,可以得到相机的内外参数。张正友标定法采用了SVD(奇异值分解)来解决这个优化问题,使问题变为一个线性求解问题。
3)畸变校正:在标定相机时还需考虑到透镜畸变问题,需要对相机进行畸变校正。张正友标定方法通过透镜畸变的多项式模型来校正径向和切向畸变。
通过以上步骤,可以得到张正友标定法的公式推导过程,最终结果是通过多个角点在多个图像中的成像坐标和物体坐标之间的关系来求解相机的内外参数,并对畸变进行校正,从而实现对相机进行标定。
4、实验准备
单目相机标定是在相机的成像过程中确定相机的内部参数和外部参数的过程,以提高相机成像的准确性。在进行单目相机标定之前,需要进行以下准备工作:
-
准备标定板:使用标定板可以提高标定的精度,通常使用的是带有方格和特定图案的标定板,可以被相机准确识别和计算。标定板必须是平整的,表面不能有损伤、污渍等影响标定结果的因素。
-
安装标定板:将标定板固定在一块大片木板或者其他固定支架上,确保标定板平整且没有移动。
-
设置相机参数:在进行标定前,需要确保相机参数设置正确,包括相机的曝光时间、焦距、光圈等参数,确保能够获得清晰且准确的标定板图像。
-
确保相机焦距:在进行标定时,需要确保相机焦距是固定的,不可更改。如果需要改变焦距,需要重新进行标定。
-
准备标定软件:在进行标定过程中,需要使用专门的标定软件,例如matlab中的相机标定工具箱,以获取相机的内部参数和外部参数。
通过以上准备工作,可以有效地进行单目相机标定,并获得准确的标定结果,以提高相机成像的准确性和稳定性。
1)棋盘格准备
棋盘格规格:边长20mm/角点为7*11(可根据自己需求进行设计)
A4纸打印棋盘格
实验棋盘格文件文章末尾链接
2)相机图像采集
彩色相机图片
图片数据文章末尾链接


5、实验过程:
在MATLAB中,提供了相机标定的工具箱,可以方便地进行单目相机标定实验。以下是一个简单的步骤,用于在MATLAB中实现单目相机标定实验:
-
准备标定板:首先准备一个带有方格和特定图案的标定板,例如Checkerboard或Dot grid。确保标定板在单目相机成像时,能够清晰地获取到标定板图像。
-
拍摄标定板图像:将标定板固定在适当位置,并使用相机拍摄多张标定板图像。确保在拍摄时,标定板的各个角度和位置都有所变化,以获得更好的标定结果。
-
在MATLAB中导入图像:将拍摄到的标定板图像导入MATLAB环境中,可以使用
imread函数加载图像。 -
使用相机标定工具箱:MATLAB提供了
Camera Calibration Toolbox工具箱,可以用于单目相机的标定。在MATLAB命令窗口中运行cameraCalibrator函数打开相机标定工具窗口。 -
添加标定板图像:在相机标定工具窗口中,通过“Add Images”按钮添加之前拍摄的标定板图像,以进行相机标定。
-
进行相机标定:在相机标定工具窗口中,选择相机标定的方法和参数,然后点击“Calibrate”按钮进行相机标定。MATLAB会对标定板图像进行处理,并计算出相机的内部参数和外部参数。
-
评估标定结果:在相机标定工具窗口中,可以查看相机的标定误差,以评估标定结果的准确性。如果标定误差较大,可以尝试重新拍摄标定板图像,或者调整标定参数进行重新标定。
通过以上步骤,可以在MATLAB中使用相机标定工具箱实现单目相机的标定实验,以获取相机的内部参数和外部参数,提高相机成像的准确性和稳定性。
1)找到APP
点击app

点击下拉
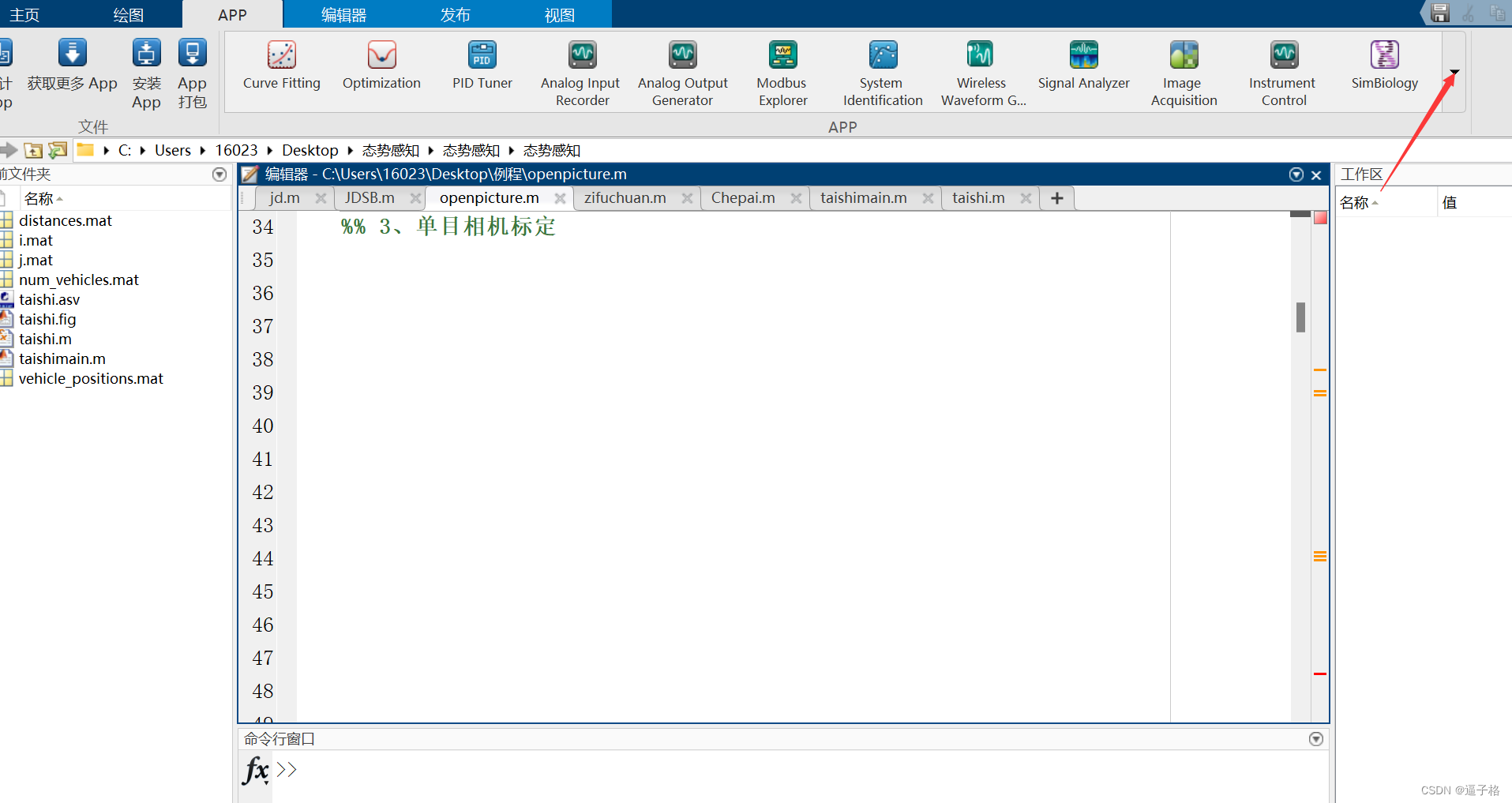
点击单目相机标定模块

2)导入数据
点击添加图片

导入标定棋盘格图
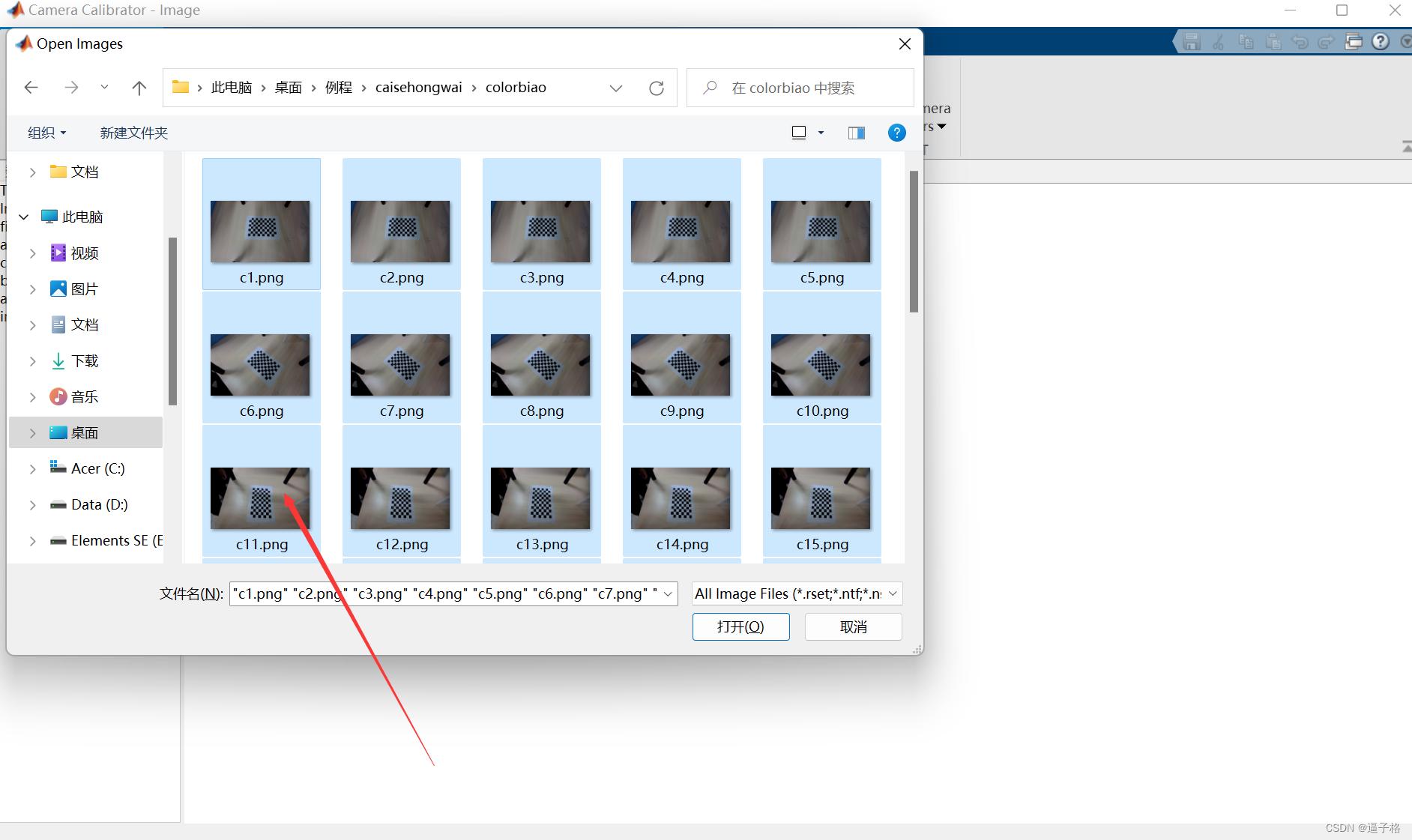
设置棋盘格宽度单位毫米

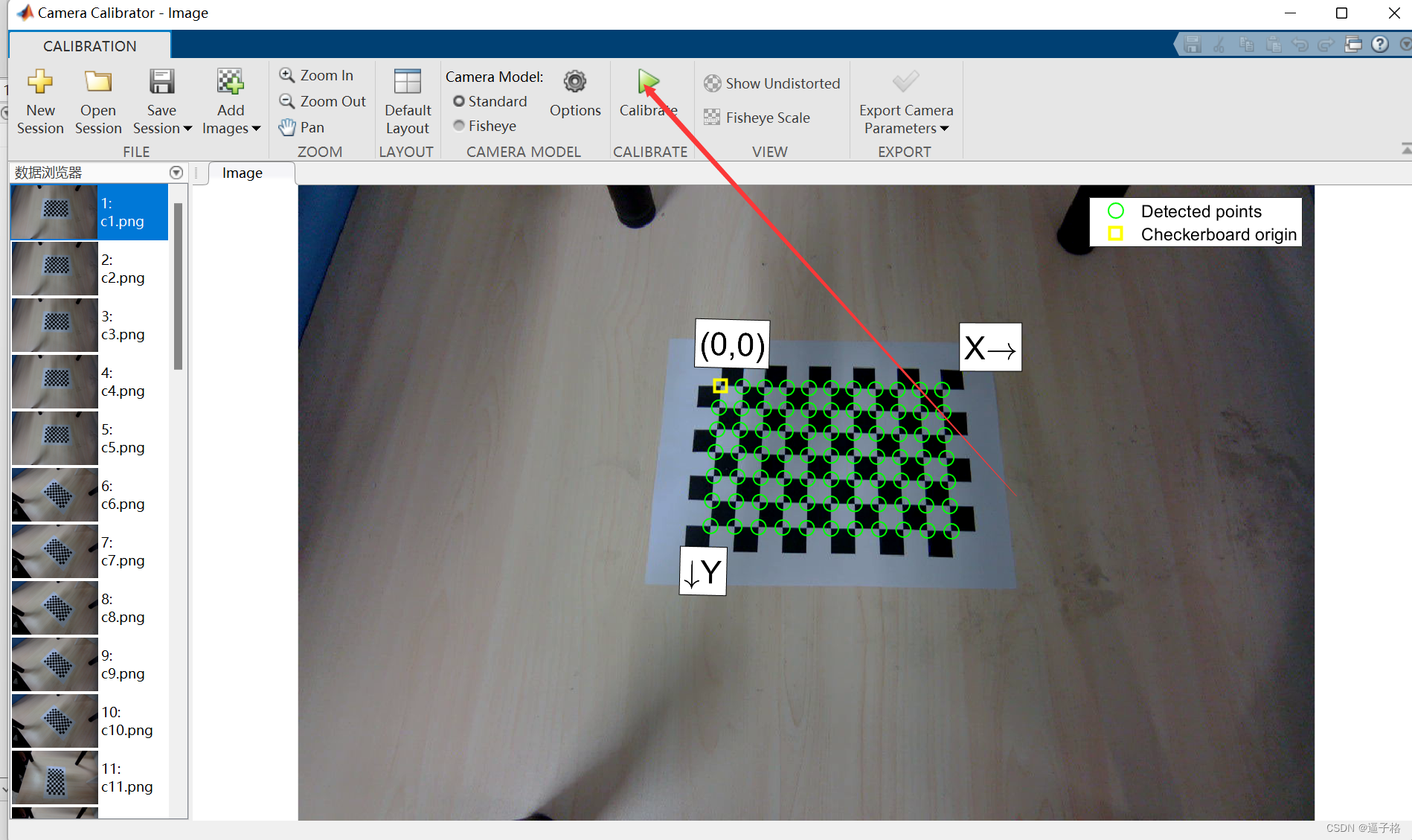
3)角点识别
识别过程

角点识别结果

4)畸变参数设置
径向畸变和切向畸变参数设置

5)开始标定
点击开始标定
6)标定结果
标定结果界面:1表示误差结果 2表示棋盘格相对相机转动示意图

棋盘格说明:黄色方框表示世界坐标系原点 绿色圆圈表示角点 红色十字表示重投影点

保存结果

结果内容:1表示相机内外参数 2表示标定精度评估 3表示投影点
实验结果文件文章末尾链接

6、实验资源
1)棋盘格
https://download.csdn.net/download/XU157303764/89354653
2)棋盘格标定图
https://download.csdn.net/download/XU157303764/89354880
3)标定结果数据
https://download.csdn.net/download/XU157303764/89354862
7、总结
在MATLAB中进行单目相机标定通常可以遵循以下步骤:
-
准备标定板:选取合适的标定板,如Checkerboard或Dot grid,确保标定板图案清晰可识别。
-
拍摄标定板图像:使用单目相机拍摄多张标定板图像,并确保角度和位置变化。
-
导入图像:将拍摄的标定板图像导入MATLAB环境中,使用
imread函数加载图像。 -
打开相机标定工具箱:运行
cameraCalibrator函数打开相机标定工具窗口。 -
添加并标定图像:在相机标定工具窗口中,通过“Add Images”按钮添加标定板图像,然后点击“Calibrate”按钮进行相机标定。
-
查看标定结果:在标定完成后,可以查看相机的内部参数(如焦距、主点位置)和外部参数(如相机位置和姿态信息)。
-
评估标定结果:检查标定误差以评估标定结果的准确性,并根据需要调整标定参数或重新标定。
-
保存标定结果:将相机的内部参数和外部参数保存下来,以备将来使用。
通过以上步骤,可以使用MATLAB中的相机标定工具箱完成单目相机的标定,获得准确的相机参数,提高图像处理和计算的准确性。需要注意的是,在进行标定时要确保标定板和相机位置的稳定性,以及标定板图案的清晰度。
相关文章:
3、matlab单目相机标定原理、流程及实验
1、单目相机标定流程及步骤 单目相机标定是通过确定相机的内部和外部参数,以便准确地在图像空间和物体空间之间建立映射关系。下面是单目相机标定的流程及步骤: 搜集标定图像:使用不同角度、距离和姿态拍摄一组标定图像,并确保标…...

【gdb 如何生成并查看core dump】
生成core dump 使用ulimit命令来设置core dump文件的大小。 ulimit -c unlimitedcore dump位置 如果程序崩溃,系统会生成一个名为core的文件。可以通过以下命令查看core文件位置, cat /proc/sys/kernel/core_pattern查看core dump gdb /path/to/you…...

极简短视频查看、删除应用
本地短视频服务器 背景:我的NAS中存放了很多短视频,多到很多没看过,于是写了这个程序来随机查看并删除短视频 运行: 安装依赖后运行main.py 直接使用docker: docker pull realwang/short_video docker run -d -p 3000:…...

【秋招刷题打卡】Day01-自定义排序
Day01-自定排序 前言 给大家推荐一下咱们的 陪伴打卡小屋 知识星球啦,详细介绍 >笔试刷题陪伴小屋-打卡赢价值丰厚奖励 < ⏰小屋将在每日上午发放打卡题目,包括: 一道该算法的模版题 (主要以力扣,牛客,acwin…...

API低代码平台介绍6-数据库记录删除功能
数据库记录删除功能 在前续文章中我们介绍了如何插入和修改数据库记录,本篇文章会沿用之前的测试数据,介绍如何使用ADI平台定义一个删除目标数据库记录的接口,包括 单主键单表删除、复合主键单表删除、多表删除(整合前两者&#x…...

计算机基础之:硬件系统的性能评估标准
服务器时钟的性能通常涉及多个方面,主要包括准确性、稳定性、以及对系统性能的影响。以下是一些关键指标和衡量方法: 准确性: 时间偏移:测量服务器时钟与一个可靠时间源(如GPS时间、原子钟或NTP服务器)之间…...

高互动UI设计揭秘:动画效果如何提升用户体验
动画,由于其酷的视觉冲击,往往会产生极好的用户体验。UI设计中的动态效果可以使用户界面看起来更酷,特别是界面的功能动画,是UX设计的重要组成部分,不容忽视。为什么UI设计的动态效果如此重要?接下来&#…...

探索Java异常处理的奥秘:源码解析与高级实践
1. 引言 在Java编程的广阔天地中,异常处理是确保程序健壮性、稳定性和可维护性的重要基石。对于Java工程师而言,深入理解Java异常处理的机制,并能够在实践中灵活运用,是迈向卓越的重要一步。 2. 基本概念 在Java中,异常(Exception)是程序执行期间出现的不正常或错误情况…...

深入了解python函数与函数内存使用
函数的定义 函数作为代码复用的基本单元,可以帮助我们组织代码、减少重复、提高可读性和可维护性。 在 Python 中,函数本质上是对象,可以赋值给变量、存储在数据结构中、作为参数传递和返回。 函数与内存 函数的加载和调用过程中ÿ…...

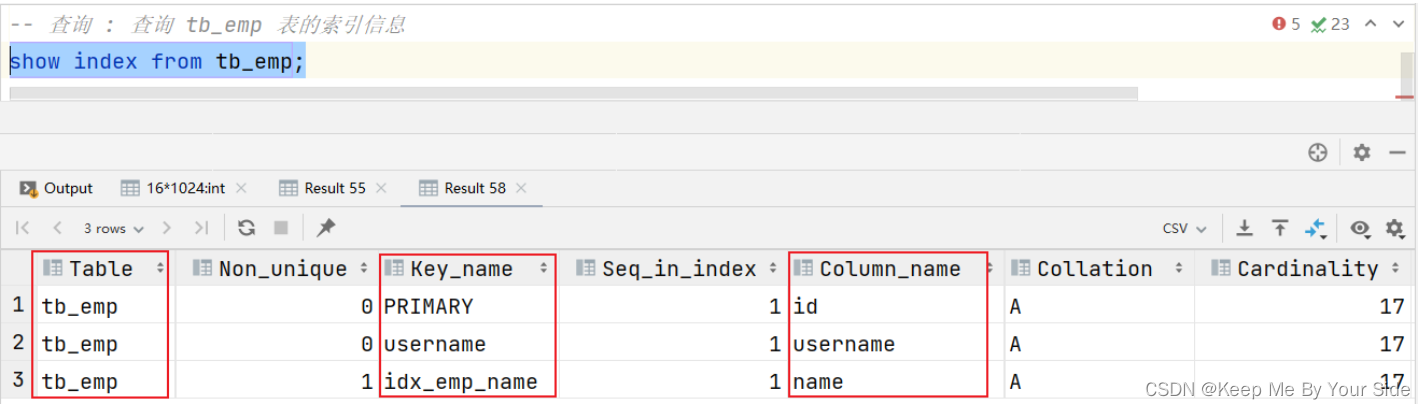
Java面试----MySQL面试题
1.索引有哪些优缺点? MySQL索引作为一种提升数据库查询效率的重要机制,具有以下主要优点和缺点: 优点: 提高查询速度: 索引能够显著加速数据的检索过程,类似于书籍的目录,让数据库引擎能够快速…...

python从入门到精通2:缩进
在Python中,缩进(Indentation)是一个非常重要的语法元素,它用于表示代码块的结构。与其他许多编程语言使用大括号 {} 来定义代码块不同,Python使用缩进来确定代码块的开始和结束。这种简洁的语法使得Python代码更加清晰…...
了解CDN:提升网络性能和安全性的利器
在当今的数字时代,网站性能和安全性是每一个网站管理员必须关注的核心问题。内容分发网络(CDN,Content Delivery Network)作为解决这一问题的重要工具,逐渐成为主流。本文将详细介绍CDN的定义、作用及其工作原理&#…...

ChatGPT的工作原理
ChatGPT的工作原理可以详细分为以下几个步骤,下面将结合相关信息进行清晰、详细的介绍: 数据收集: ChatGPT首先会从大量的文本数据中收集信息,这些数据可能包括网页、新闻、书籍等多样化的来源。它还会特别关注和分析网络上的热点…...

基于DPU的云原生裸金属服务快速部署及存储解决方案
1. 背景介绍 1.1. 业务背景 在云原生技术迅速发展的当下,容器技术因其轻量级、可移植性和快速部署的特性而成为应用部署的主流选择,但裸金属服务器依然有其独特的价值和应用场景,是云原生架构中不可或缺的一部分。 裸金属服务器是一种高级…...

论文学习_Large Language Models Based Fuzzing Techniques: A Survey
论文名称发表时间发表期刊期刊等级研究单位Large Language Models Based Fuzzing Techniques: A Survey 2024年arXiv-悉尼大学 0.摘要 研究背景在软件发挥举足轻重作用的现代社会,软件安全和漏洞分析对软件开发至关重要,模糊测试作为一种高效的软件测试方法,并广泛应用于各个…...
响应式德米拉数字内容交易系统素材下载站模板
★模板说明★ 该数字交易系统设计非常完美,两种响应式模式,可打开边栏模式和盒子模式;八种网站颜色,四种风格颜色可供用户自行选择,还可在网站选背景图片;完美的分成系统、充值功能、个人中心等等都以html…...
数据库开发-MySQL
前言 首先来了解一下什么是数据库。 数据库:英文为 DataBase,简称DB,它是存储和管理数据的仓库。 像我们日常访问的电商网站京东,企业内部的管理系统OA、ERP、CRM这类的系统,以及大家每天都会刷的头条、抖音类的app…...

香港大带宽服务器高性能配置选择灵活
香港大带宽服务器是指在香港数据中心托管的,配备了高速网络连接的服务器。这些服务器通常用于需要大量数据传输和快速响应时间的应用,如视频流媒体、在线游戏、远程工作和大规模数据处理任务。具体分析如下,rak部落为您整理发布。 1. **内存配…...

Oracle中生僻汉字的解决办法
在Oracle数据库中处理生僻汉字时,主要面临的问题是某些字符集可能无法完全支持所有的汉字,特别是生僻字。以下是一些解决Oracle中生僻汉字问题的办法: 检查当前字符集: 使用SELECT USERENV(language) FROM dual;命令来查看当前数…...
)
在Kotlin中,`field`关键字是一个特殊的标识符,用于在属性的自定义getter和setter中访问backing field(存储属性值的实际字段)
在Kotlin中,field关键字是一个特殊的标识符,用于在属性的自定义getter和setter中访问backing field(存储属性值的实际字段)。Kotlin属性默认提供getter和setter方法,但当你需要自定义它们的行为时,可以使用…...

心灵鸡汤01 - 人生九不争
一、跟父母,不争口舌; 二、跟朋友,不争面子; 三、跟领导,不争高低; 四、跟小人,不争道理; 五、跟伴侣,不争对错; 六、跟亲戚,不争穷富;…...

PetaLinux下为ZynqMP配置GMII2RGMII驱动:从设备树修改到内核编译的完整指南
PetaLinux下为ZynqMP配置GMII2RGMII驱动的实战指南 在嵌入式Linux开发中,以太网驱动的配置往往是系统集成的关键环节。对于使用Xilinx ZynqMP芯片的开发者来说,当硬件设计采用GMII2RGMII IP核实现PL端以太网功能时,如何在PetaLinux环境下正确…...

跨平台文件自由:Free-NTFS-for-Mac 终极解决方案深度解析
跨平台文件自由:Free-NTFS-for-Mac 终极解决方案深度解析 【免费下载链接】Free-NTFS-for-Mac Nigate: An open-source NTFS utility for Mac. It supports all Mac models (Intel and Apple Silicon), providing full read-write access, mounting, and management…...

KV缓存优化在语音大模型中的挑战与AudioKV解决方案
1. KV缓存管理在大型语言模型中的核心挑战在Transformer架构的大型语言模型(LLM)推理过程中,KV(Key-Value)缓存技术通过存储历史注意力键值对来避免重复计算,这项优化使得自回归生成的计算复杂度从O(n)降低…...
)
Win10/Win11更新后飞行堡垒风扇快捷键失效?手把手教你找回丢失的FN+F5控制(附各型号解决方案对照表)
Win10/Win11更新后飞行堡垒风扇快捷键失效?深度修复指南与全型号适配方案 每次Windows大版本更新后,总有些硬件功能像变魔术一样消失——比如飞行堡垒系列笔记本的风扇控制快捷键FNF5。这背后其实是微软系统更新机制与厂商驱动之间的微妙博弈。作为从飞…...

63岁黄仁勋再添博士头衔、英特尔CEO为其披袍,最新演讲刷屏:人类编写软件、计算机执行指令的范式已终结!
整理 | 苏宓 出品 | CSDN(ID:CSDNnews) 日前,在卡内基梅隆大学(CMU)的 2026 届毕业典礼上,英伟达 CEO 黄仁勋的头衔再加一,最新获得 CMU 科学与技术荣誉博士学位,而这也是…...

WarcraftHelper:魔兽争霸3终极增强插件完全指南
WarcraftHelper:魔兽争霸3终极增强插件完全指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper WarcraftHelper是一款专为魔兽争霸3设计的…...

为什么你的DeepSeek Function Calling总在凌晨2点失败?12个真实生产事故时间序列分析报告
更多请点击: https://intelliparadigm.com 第一章:为什么你的DeepSeek Function Calling总在凌晨2点失败?12个真实生产事故时间序列分析报告 凌晨2点,监控告警突响——DeepSeek R1 的 Function Calling 接口成功率从99.98%骤降至…...

SystemVerilog仿真探秘:从delta-cycle到时间片的时序解析
1. 揭开SystemVerilog仿真的神秘面纱 刚接触SystemVerilog仿真时,很多人都会被"delta-cycle"和"时间片"这些概念搞得一头雾水。我刚开始学习时也是这样,直到在实际项目中遇到了信号竞争问题,才真正理解这些概念的重要性。…...

从ONOS 1.10.0升级到1.15.0,我踩了这些坑:日志命令、GUI激活与依赖项变化全记录
从ONOS 1.10.0升级到1.15.0的实战避坑指南 当你从ONOS 1.10.0升级到1.15.0时,可能会遇到一系列意料之外的"惊喜"。作为一个刚从这场升级大战中幸存下来的老兵,我想分享一些血泪教训和实用技巧,帮助后来者少走弯路。 1. 升级前的准备…...