深度学习算法informer(时序预测)(三)(Encoder)
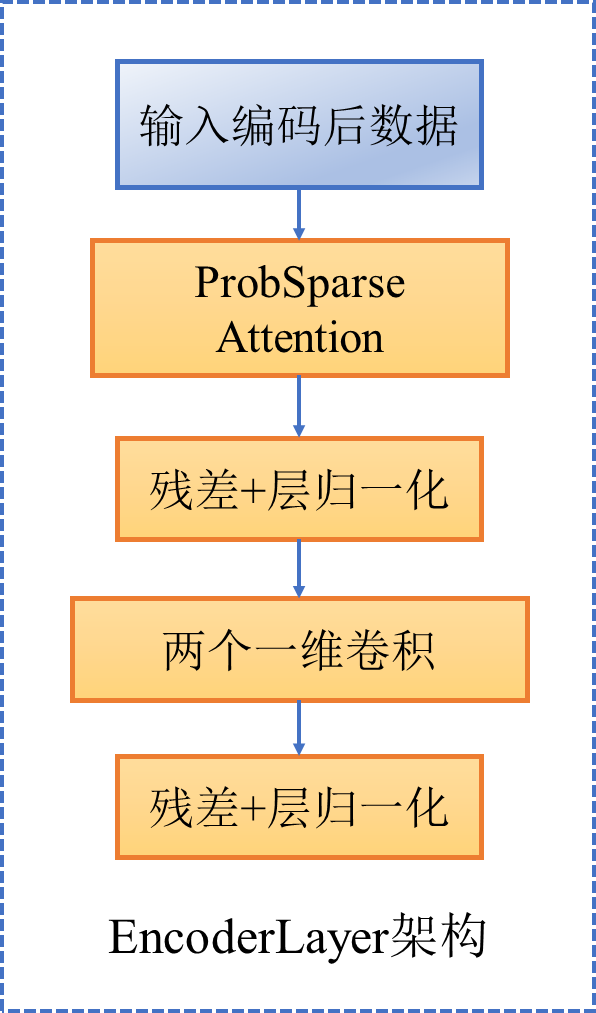
一、EncoderLayer架构如图(不改变输入形状)
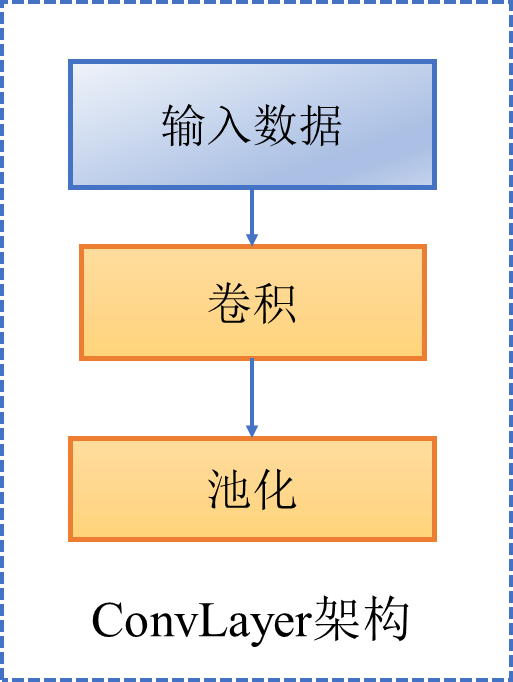
二、ConvLayer架构如图(输入形状中特征维度减半)
三、Encoder整体
包括三部分
1. 多层EncoderLayer
2. 多层ConvLayer
3. 层归一化
代码如下
class AttentionLayer(nn.Module):def __init__(self, attention, d_model, n_heads, d_keys=None, d_values=None, mix=False):super(AttentionLayer, self).__init__()d_keys = d_keys or (d_model//n_heads)d_values = d_values or (d_model//n_heads)self.inner_attention = attentionself.query_projection = nn.Linear(d_model, d_keys * n_heads)self.key_projection = nn.Linear(d_model, d_keys * n_heads)self.value_projection = nn.Linear(d_model, d_values * n_heads)self.out_projection = nn.Linear(d_values * n_heads, d_model)self.n_heads = n_headsself.mix = mixdef forward(self, queries, keys, values, attn_mask):B, L, _ = queries.shape_, S, _ = keys.shapeH = self.n_headsqueries = self.query_projection(queries).view(B, L, H, -1)keys = self.key_projection(keys).view(B, S, H, -1)values = self.value_projection(values).view(B, S, H, -1)out, attn = self.inner_attention(queries,keys,values,attn_mask)if self.mix:out = out.transpose(2,1).contiguous()out = out.view(B, L, -1)return self.out_projection(out), attnclass ConvLayer(nn.Module):def __init__(self, c_in):super(ConvLayer, self).__init__()padding = 1 if torch.__version__>='1.5.0' else 2self.downConv = nn.Conv1d(in_channels=c_in,out_channels=c_in,kernel_size=3,padding=padding,padding_mode='circular')# 批量归一化层的作用是在训练过程中对每个批次的数据进行归一化处理# 使其均值接近于 0,方差接近于 1,从而加速模型的训练和提高模型的稳定性# 不会改变形状self.norm = nn.BatchNorm1d(c_in)self.activation = nn.ELU()self.maxPool = nn.MaxPool1d(kernel_size=3, stride=2, padding=1)def forward(self, x):x = self.downConv(x.permute(0, 2, 1))x = self.norm(x)x = self.activation(x)x = self.maxPool(x)x = x.transpose(1,2)return xclass EncoderLayer(nn.Module):def __init__(self, attention, d_model, d_ff=None, dropout=0.1, activation="relu"):super(EncoderLayer, self).__init__()d_ff = d_ff or 4*d_modelself.attention = attentionself.conv1 = nn.Conv1d(in_channels=d_model, out_channels=d_ff, kernel_size=1)self.conv2 = nn.Conv1d(in_channels=d_ff, out_channels=d_model, kernel_size=1)self.norm1 = nn.LayerNorm(d_model)self.norm2 = nn.LayerNorm(d_model)self.dropout = nn.Dropout(dropout)self.activation = F.relu if activation == "relu" else F.geludef forward(self, x, attn_mask=None):# x [B, L, D]# x = x + self.dropout(self.attention(# x, x, x,# attn_mask = attn_mask# ))new_x, attn = self.attention(x, x, x,attn_mask = attn_mask)x = x + self.dropout(new_x)y = x = self.norm1(x)y = self.dropout(self.activation(self.conv1(y.transpose(-1,1))))y = self.dropout(self.conv2(y).transpose(-1,1))return self.norm2(x+y), attnclass Encoder(nn.Module):def __init__(self, attn_layers, conv_layers=None, norm_layer=None):super(Encoder, self).__init__()self.attn_layers = nn.ModuleList(attn_layers)self.conv_layers = nn.ModuleList(conv_layers) if conv_layers is not None else Noneself.norm = norm_layerdef forward(self, x, attn_mask=None):# x [B, L, D]attns = []if self.conv_layers is not None:for attn_layer, conv_layer in zip(self.attn_layers, self.conv_layers):x, attn = attn_layer(x, attn_mask=attn_mask)x = conv_layer(x)attns.append(attn)x, attn = self.attn_layers[-1](x, attn_mask=attn_mask)attns.append(attn)else:for attn_layer in self.attn_layers:x, attn = attn_layer(x, attn_mask=attn_mask)attns.append(attn)if self.norm is not None:x = self.norm(x)相关文章:
深度学习算法informer(时序预测)(三)(Encoder)
一、EncoderLayer架构如图(不改变输入形状) 二、ConvLayer架构如图(输入形状中特征维度减半) 三、Encoder整体 包括三部分 1. 多层EncoderLayer 2. 多层ConvLayer 3. 层归一化 代码如下 class AttentionLayer(nn.Module):de…...

HTML和CSS基础(一)
前言 HTML(HyperText Markup Language)是一种用于创建网页的标准标记语言。它由各种标签组成,这些标签定义了网页的结构和内容。HTML的早期形式诞生于1989年,由CERN的物理学家Tim Berners-Lee发明,最初用于在科学家之…...

低代码平台教你两步把SQL直接转换为RESTful API
文章目录 前言一、简介1. 项目亮点2. 技术栈3. 核心功能4. 数据库设计二、搭建教程1. 目录结构2. 下载2.1 下载2.2 上传2.3 解压3. 配置3.1 创建并切换数据库3.2 执行sql文件3.3 修改配置文件4. 启动/停止4.1 启动4.2 停止4.3 重启5. 浏览器访问三、配置教程1. 数据源配置1.1 创…...
)
JavaWeb阶段学习知识点(二)
登录校验和JWT令牌实现 JWT使用方式 创建一个springboot项目,pom.xml引入jwt依赖 <dependency><groupId>io.jsonwebtoken</groupId><artifactId>jjwt</artifactId><version>0.9.1</version></dependency><!-- 针对jdk17或…...

数据结构【二叉树】
前言 我们在前面学习了使用数组来实现二叉树,但是数组实现二叉树仅适用于完全二叉树(非完全二叉树会有空间浪费),所以我们本章讲解的是链式二叉树,但由于学习二叉树的操作需要有一颗树,才能学习相关的基本…...

Vue P17-54
18、计算属性 示例:实现姓名的联动效果 可以用插值语法、method {{func()}} 这里必须有 ()表示返回值 在事件处理中,click“func1” 有没有无所谓 computed的计算属性和data中的属性都在vm中,但vm._data里只有后者…...

【自动驾驶】从零开始做自动驾驶小车
文章目录 自动驾驶小车系统、运动底盘的运动学分析和串口通信控制电机PID控制IMU初始化与陀螺仪零点漂移ubuntu基础教程ROS基础键盘控制巡线(雷达避障)雷达跟随视觉跟踪2D建图、2D导航3D建图、3D导航纯视觉建图导航语音控制KCF跟随自主建图建图与导航多机编队WEB浏览器显示摄像…...

一文让你彻底搞懂什么是VR、AR、AV、MR
随着科技的飞速发展,现实世界与虚拟世界的界限变得越来越模糊。各种与现实增强相关的技术如雨后春笋般涌现,令人眼花缭乱。本文将为你详细解读四种常见的现实增强技术:虚拟现实(VR)、增强现实(AR࿰…...
Python设计模式 - 简单工厂模式
定义 简单工厂模式是一种创建型设计模式,它通过一个工厂类来创建对象,而不是通过客户端直接实例化对象。 结构 工厂类(Factory):负责创建对象的实例。工厂类通常包含一个方法,根据输入参数的不同创建并返…...

L55--- 257.二叉树的所有路径(深搜)---Java版
1.题目描述 2.思路 (1)因为是求二叉树的所有路径 (2)然后是带固定格式的 所以我们要把每个节点的整数数值换成字符串数值 (3)首先先考虑根节点,也就是要满足节点不为空 返回递归的形式dfs(根节…...

智慧园区解决方案PPT(53页)
## 1.1 智慧园区背景及需求分析 - 智慧园区的发展历程包括园区规划、经济、产业、企业、管理、理念的转变,强调管理模式创新,关注业务综合化、管理智慧化等发展。 ## 1.2 国家对智慧园区发展的政策 - 涉及多个国家部门,如工信部、住建部、…...
)
Windows安装MySQL(8.0.37)
安装:https://blog.csdn.net/XLBYYDS/article/details/139711682 注意点: (1)必须安装到C盘系统盘,否则执行 net start mysql 启动服务时,可能会启动失败。 (2)如果安装时出现 The…...
永磁同步电机驱动死区补偿
1 死区效应及补偿 1. 1 死区效应 在本文的电机控制嵌入式系统中,逆变器为三 相电压型桥式逆变电路,如图 1 所示。 在理想状态 下,上桥臂和下桥臂的控制信号满足互补通断原则, 即上桥臂开通时,下桥臂关断,反之亦然。 而在实际 应用中,开关管的通断需要一定的开通时…...

智能体合集
海外版coze: 前端代码助手 后端代码助手: 前端代码助手:...

智能农业管理系统设计
一、引言 随着物联网、云计算和大数据技术的快速发展,智能农业管理系统成为提高农业生产效率、优化资源配置、降低环境污染的重要手段。本设计旨在构建一个集数据采集、传输、处理、分析于一体的智能农业管理系统,为农业生产提供全方位、精准化的服务。 …...
Matlab的Simulink系统仿真(simulink调用m函数)
这几天要用Simulink做一个小东西,所以在网上现学现卖,加油! 起初的入门是看这篇文章MATLAB 之 Simulink 操作基础和系统仿真模型的建立_matlab仿真模型搭建-CSDN博客 写的很不错 后面我想在simulink中调用m文件 在 Simulink 中调用 MATLA…...

C语言中操作符详解(一)
众所周知,在我们的C语言中有着各式各样的操作符,并且在此之前呢,我们已经认识并运用了许许多多的操作符,都是诸君的老朋友了昂 操作符作为我们使用C语言的一个非常非常非常重要的工具,诸君一定要加以重视,…...

【论文阅读】Multi-Camera Unified Pre-Training via 3D Scene Reconstruction
论文链接 代码链接 多摄像头三维感知已成为自动驾驶领域的一个重要研究领域,为基于激光雷达的解决方案提供了一种可行且具有成本效益的替代方案。具有成本效益的解决方案。现有的多摄像头算法主要依赖于单目 2D 预训练。然而,单目 2D 预训练忽略了多摄像…...

深入了解NumPy的原理与使用
文章目录 一、引言二、NumPy的原理1. 多维数组对象2. 广播(Broadcasting)3. 内存效率和速度 三、NumPy的使用1. 创建数组2. 数组操作3. 广播(Broadcasting)示例 四、总结 一、引言 在Python的数据科学和科学计算领域,…...

Linux Centos 环境下搭建RocketMq集群(双主双从)
1、下载rocketmq的包 下载 | RocketMQ 2、配置环境变量 1、编辑环境变量文件:vim /etc/profile2、加入如下配置: #rocketmq 4.9.8 ROCKETMQ_HOME/home/rocketmq/rocketmq-4.9.8 export PATH${ROCKETMQ_HOME}/bin:${PATH}3、刷新配置:source…...

STM32F407移植QP状态机踩坑实录:从编译报错到成功运行,我解决了这三个关键问题
STM32F407移植QP状态机踩坑实录:从编译报错到成功运行,我解决了这三个关键问题 在嵌入式开发中,状态机是一种极其重要的编程范式,它能有效管理复杂系统的行为逻辑。QP(Quantum Platform)作为一款轻量级的状…...

告别网络依赖:CircuitJS1桌面版带你体验离线电路仿真的自由
告别网络依赖:CircuitJS1桌面版带你体验离线电路仿真的自由 【免费下载链接】circuitjs1 Standalone (offline) version of the Circuit Simulator with small modifications based on modified NW.js. 项目地址: https://gitcode.com/gh_mirrors/circ/circuitjs1…...
)
从零到联网:QNX Neutrino RTOS安装后的第一个网络配置实战(含ifconfig与DHCP详解)
从零到联网:QNX Neutrino RTOS安装后的第一个网络配置实战 当你第一次看到QNX Neutrino RTOS的Photon桌面时,那种兴奋感可能很快会被一个现实问题冲淡——这个看起来酷炫的系统怎么连上网?作为实时操作系统领域的标杆,QNX在车载系…...

量化交易强化学习环境TradingGym:从Gym接口到实战策略训练
1. 项目概述:一个为量化交易策略量身定制的强化学习训练场如果你正在尝试将强化学习(Reinforcement Learning, RL)应用到股票、期货或加密货币的量化交易中,大概率会遇到一个共同的困境:环境太难搭了。市面上的回测框架…...

基于LLM的游戏AI智能体:从感知到决策的框架构建与实践
1. 项目概述:一个能“玩”游戏的AI智能体最近在GitHub上看到一个挺有意思的项目,叫ChattyPlay-Agent。光看名字,你可能会觉得这又是一个基于大语言模型的聊天机器人。但点进去仔细研究后,我发现它的定位非常独特:这是一…...

终极ThinkPad风扇控制指南:告别噪音,拥抱静音高效
终极ThinkPad风扇控制指南:告别噪音,拥抱静音高效 【免费下载链接】TPFanCtrl2 ThinkPad Fan Control 2 (Dual Fan) for Windows 10 and 11 项目地址: https://gitcode.com/gh_mirrors/tp/TPFanCtrl2 你是否曾经因为ThinkPad风扇的"直升机起…...

物联网安防系统故障排查与ESP8266固件刷写实战指南
1. 物联网安防系统故障排查实战做物联网安防系统,最怕的就是“哑火”。你花了好几天时间,把ESP8266、Raspberry Pi、MQTT Broker、Adafruit.IO和IFTTT像搭积木一样连起来,满心期待它能在关键时刻给你发条短信。结果,门被推开了&am…...

AI智能体操作安卓设备:基于agent-droid-bridge的自动化实践
1. 项目概述:连接AI与安卓设备的桥梁 最近在折腾AI智能体(Agent)和自动化流程时,遇到了一个挺有意思的需求:如何让运行在服务器上的AI程序,直接去操作一台真实的安卓手机或模拟器,完成一些复杂的…...

Qwen2.5-14B实战指南:3个关键步骤突破本地大模型部署瓶颈
Qwen2.5-14B实战指南:3个关键步骤突破本地大模型部署瓶颈 【免费下载链接】Qwen2.5-14B 项目地址: https://ai.gitcode.com/hf_mirrors/ai-gitcode/Qwen2.5-14B 当开发者面对复杂的代码生成任务或技术文档分析需求时,往往会受限于云端API的延迟和…...

小米汽车Q3真车现身:科技巨头跨界造车的技术路径与市场挑战
1. 项目概述:从“Q3真车现身”看小米汽车的阶段性成果最近,小米汽车项目代号“Q3”的测试车辆在公开道路上被频繁捕获,这已经不是简单的谍照,而是接近量产状态的“真车”现身。作为一名长期关注汽车产业变革,特别是科技…...