【摄像头标定】双目摄像头标定及矫正-opencv(python)
双目摄像头标定及矫正
- 棋盘格标定板
- 标定
- 矫正
棋盘格标定板
本文使用棋盘格标定板,可以到这篇博客中下载:https://blog.csdn.net/qq_39330520/article/details/107864568
标定
要进行标定首先需要双目拍的棋盘格图片,20张左右,由于本文的双目摄像头嵌入在开发板底板中,并且使用的是ros进行开发,所以对于大部分人拍照这里是没有参考价值的,对于也是使用ros开发的小伙伴,需要写一个节点发布双目摄像头的图像数据,然后再写一个节点订阅双目摄像头数据进行拍照保存。本文重点也不在拍照,对于其他小伙伴可以直接搜索一些适用的拍照方法,只要能获得到图片即可。
左摄像头图片如下:

右摄像头图片如下:
由于摄像头底层代码有问题,所以图像很暗,但不影响标定。
标定代码如下:
import cv2
import os
import numpy as np
import itertools
import yaml# 定义文件夹路径
left_folder = "C:/new_pycharm_project/yolov10-main/shuangmu_left_pic"
right_folder = "C:/new_pycharm_project/yolov10-main/shuangmu_right_pic"# 获取图像文件列表并排序
left_images = sorted(os.listdir(left_folder))
right_images = sorted(os.listdir(right_folder))# 确保左右相机图像数量一致
assert len(left_images) == len(right_images), "左右相机图像数量不一致"# 加载两个摄像头图片文件夹并将里面的彩图转换为灰度图
def load_images(folder, images):img_list = []for img_name in images:img_path = os.path.join(folder, img_name)frame = cv2.imread(img_path)if frame is not None:gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)img_list.append((frame, gray))else:print(f"无法读取图像: {img_path}")return img_list# 检测棋盘格角点
def get_corners(imgs, pattern_size):corners = []for frame, gray in imgs:ret, c = cv2.findChessboardCorners(gray, pattern_size) #ret 表示是否成功找到棋盘格角点,c 是一个数组,包含了检测到的角点的坐标if not ret:print("未能检测到棋盘格角点")continuec = cv2.cornerSubPix(gray, c, (5, 5), (-1, -1),(cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)) #cv2.cornerSubPix 函数用于提高棋盘格角点的精确度,对初始检测到的角点坐标 c 进行优化corners.append(c) #将优化后的角点坐标 c 添加到 corners 列表中# 绘制角点并显示vis = frame.copy()cv2.drawChessboardCorners(vis, pattern_size, c, ret)new_size = (1280, 800)resized_img = cv2.resize(vis, new_size)cv2.imshow('Corners', resized_img)cv2.waitKey(150)return corners# 相机标定
def calibrate_camera(object_points, corners, imgsize):cm_input = np.eye(3, dtype=np.float32)ret = cv2.calibrateCamera(object_points, corners, imgsize, cm_input, None)return retdef save_calibration_to_yaml(file_path, cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T, E, F):data = {'camera_matrix_left': {'rows': 3,'cols': 3,'dt': 'd','data': cameraMatrix_l.flatten().tolist()},'dist_coeff_left': {'rows': 1,'cols': 5,'dt': 'd','data': distCoeffs_l.flatten().tolist()},'camera_matrix_right': {'rows': 3,'cols': 3,'dt': 'd','data': cameraMatrix_r.flatten().tolist()},'dist_coeff_right': {'rows': 1,'cols': 5,'dt': 'd','data': distCoeffs_r.flatten().tolist()},'R': {'rows': 3,'cols': 3,'dt': 'd','data': R.flatten().tolist()},'T': {'rows': 3,'cols': 1,'dt': 'd','data': T.flatten().tolist()},'E': {'rows': 3,'cols': 3,'dt': 'd','data': E.flatten().tolist()},'F': {'rows': 3,'cols': 3,'dt': 'd','data': F.flatten().tolist()}}with open(file_path, 'w') as file:yaml.dump(data, file, default_flow_style=False)print(f"Calibration parameters saved to {file_path}")img_left = load_images(left_folder, left_images) #img_left是个列表,存放左摄像头所有的灰度图片。
img_right = load_images(right_folder, right_images)
pattern_size = (8, 5)
corners_left = get_corners(img_left, pattern_size) #corners_left的长度表示检测到棋盘格角点的图像数量。corners_left[i] 和 corners_right[i] 中存储了第 i 张图像检测到的棋盘格角点的二维坐标。
corners_right = get_corners(img_right, pattern_size)
cv2.destroyAllWindows()# 断言,确保所有图像都检测到角点
assert len(corners_left) == len(img_left), "有图像未检测到左相机的角点"
assert len(corners_right) == len(img_right), "有图像未检测到右相机的角点"# 准备标定所需数据
points = np.zeros((8 * 5, 3), dtype=np.float32) #创建40 行 3 列的零矩阵,用于存储棋盘格的三维坐标点。棋盘格的大小是 8 行 5 列,40 个角点。数据类型为 np.float32,这是一张图的,因为一个角点对应一个三维坐标
points[:, :2] = np.mgrid[0:8, 0:5].T.reshape(-1, 2) * 21 #给这些点赋予实际的物理坐标,* 21 是因为每个棋盘格的大小为 21mmobject_points = [points] * len(corners_left) #包含了所有图像中棋盘格的三维物理坐标点 points。这里假设所有图像中棋盘格的物理坐标是相同的,因此用 points 复制 len(corners_left) 次。
imgsize = img_left[0][1].shape[::-1] #img_left[0] 是左相机图像列表中的第一张图像。img_left[0][1] 是该图像的灰度图像。shape[::-1] 取灰度图像的宽度和高度,并反转顺序,以符合 calibrateCamera 函数的要求。print('开始左相机标定')
ret_l = calibrate_camera(object_points, corners_left, imgsize) #object_points表示标定板上检测到的棋盘格角点的三维坐标;corners_left[i]表示棋盘格角点在图像中的二维坐标;imgsize表示图像大小
retval_l, cameraMatrix_l, distCoeffs_l, rvecs_l, tvecs_l = ret_l[:5] #返回值里就包含了标定的参数print('开始右相机标定')
ret_r = calibrate_camera(object_points, corners_right, imgsize)
retval_r, cameraMatrix_r, distCoeffs_r, rvecs_r, tvecs_r = ret_r[:5]# 立体标定,得到左右相机的外参:旋转矩阵、平移矩阵、本质矩阵、基本矩阵
print('开始立体标定')
criteria_stereo = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 1e-5)
ret_stereo = cv2.stereoCalibrate(object_points, corners_left, corners_right,cameraMatrix_l, distCoeffs_l,cameraMatrix_r, distCoeffs_r,imgsize, criteria=criteria_stereo,flags=cv2.CALIB_FIX_INTRINSIC)
ret, _, _, _, _, R, T, E, F = ret_stereo# 输出结果
print("左相机内参:\n", cameraMatrix_l)
print("左相机畸变系数:\n", distCoeffs_l)
print("右相机内参:\n", cameraMatrix_r)
print("右相机畸变系数:\n", distCoeffs_r)
print("旋转矩阵 R:\n", R)
print("平移向量 T:\n", T)
print("本质矩阵 E:\n", E)
print("基本矩阵 F:\n", F)
print("标定完成")# 保存标定结果
save_calibration_to_yaml('calibration_parameters.yaml', cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T, E, F)# 计算重投影误差
def compute_reprojection_errors(objpoints, imgpoints, rvecs, tvecs, mtx, dist):total_error = 0total_points = 0for i in range(len(objpoints)):imgpoints2, _ = cv2.projectPoints(objpoints[i], rvecs[i], tvecs[i], mtx, dist)error = cv2.norm(imgpoints[i], imgpoints2, cv2.NORM_L2) / len(imgpoints2)total_error += errortotal_points += len(imgpoints2)mean_error = total_error / total_pointsreturn mean_error# 计算并打印左相机和右相机的重投影误差
print("左相机重投影误差: ", compute_reprojection_errors(object_points, corners_left, rvecs_l, tvecs_l, cameraMatrix_l, distCoeffs_l))
print("右相机重投影误差: ", compute_reprojection_errors(object_points, corners_right, rvecs_r, tvecs_r, cameraMatrix_r, distCoeffs_r))# 立体矫正和显示
def stereo_rectify_and_display(img_l, img_r, cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T):img_size = img_l.shape[:2][::-1]# 立体校正R1, R2, P1, P2, Q, _, _ = cv2.stereoRectify(cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, img_size, R, T)map1x, map1y = cv2.initUndistortRectifyMap(cameraMatrix_l, distCoeffs_l, R1, P1, img_size, cv2.CV_32FC1)map2x, map2y = cv2.initUndistortRectifyMap(cameraMatrix_r, distCoeffs_r, R2, P2, img_size, cv2.CV_32FC1)# 图像矫正rectified_img_l = cv2.remap(img_l, map1x, map1y, cv2.INTER_LINEAR)rectified_img_r = cv2.remap(img_r, map2x, map2y, cv2.INTER_LINEAR)# 显示矫正后的图像combined_img = np.hstack((rectified_img_l, rectified_img_r))cv2.imshow('Rectified Images', combined_img)cv2.imwrite("stereo_jiaozheng.png",combined_img)cv2.waitKey(0)cv2.destroyAllWindows()# 加载并矫正示例图像
example_idx = 0
img_l = img_left[example_idx][0]
img_r = img_right[example_idx][0]
stereo_rectify_and_display(img_l, img_r, cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T)
标定完成后会显示一张矫正后的图像。代码重要的地方都给出了注释,主要流程就是分别对左右相机进行标定,然后对两个相机进行联合标定(立体标定),最后得到的参数会保存到yaml文件中:
---
camera_matrix_left:rows: 3cols: 3dt: ddata:- 531.7200210313852- 0- 642.0170539101581- 0- 533.6471323984354- 420.4033045027399- 0- 0- 1
dist_coeff_left:rows: 1cols: 5dt: ddata:- -0.1670007968198256- 0.04560028196221921- 0.0011938487550718078- -0.000866537907860316- -0.00805042100882671
camera_matrix_right:rows: 3cols: 3dt: ddata:- 525.9058345430292- 0- 628.7761214904813- 0- 528.2078922687268- 381.8575789135264- 0- 0- 1
dist_coeff_right:rows: 1cols: 5dt: ddata:- -0.15320688387351564- 0.03439886104586617- -0.0003732170677440928- -0.0024909528446780153- -0.005138400994014348
R:rows: 3cols: 3dt: ddata:- 0.9999847004116569- -0.00041406631566505544- 0.005516112008926496- 0.0003183979929468572- 0.9998497209492369- 0.017333036100216304- -0.005522460079247196- -0.017331014592906722- 0.9998345554979852
T:rows: 3cols: 1dt: ddata:- -55.849260376265015- 2.1715925432988743- 0.46949841441903933
E:rows: 3cols: 3dt: ddata:- -0.012142020481601675- -0.5070637607007459- 2.1630954322858496- 0.1610659204031652- -0.9681187500627653- 55.84261022903612- -2.189341611238282- -55.83996821910631- -0.9800159939787676
F:rows: 3cols: 3dt: ddata:- -2.4239149875305048e-8- -0.0000010085973649868748- 0.0027356495714066175- 3.2013501988129346e-7- -0.0000019172863951399893- 0.05961765359743852- -0.002405523166325036- -0.057046539240958545- 1分别是左相机的内参矩阵、畸变系数,右相机的内参矩阵和畸变系数,两个相机之间的旋转矩阵、平移矩阵、本质矩阵、基本矩阵。
矫正
import cv2
import yaml
import numpy as np# 定义函数读取标定数据
def read_calibration_data(calibration_file):with open(calibration_file, 'r') as f:calib_data = yaml.safe_load(f)cameraMatrix_l = np.array(calib_data['camera_matrix_left']['data']).reshape(3, 3)distCoeffs_l = np.array(calib_data['dist_coeff_left']['data'])cameraMatrix_r = np.array(calib_data['camera_matrix_right']['data']).reshape(3, 3)distCoeffs_r = np.array(calib_data['dist_coeff_right']['data'])R = np.array(calib_data['R']['data']).reshape(3, 3)T = np.array(calib_data['T']['data']).reshape(3, 1)return cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T# 定义函数对图像进行矫正
def rectify_images(left_image_path, right_image_path, calibration_file):# 读取标定数据cameraMatrix_l, distCoeffs_l, cameraMatrix_r, distCoeffs_r, R, T = read_calibration_data(calibration_file)# 读取左右图像img_left = cv2.imread(left_image_path)img_right = cv2.imread(right_image_path)# 获取图像尺寸(假设左右图像尺寸相同)img_size = img_left.shape[:2][::-1]# 立体校正R1, R2, P1, P2, Q, roi1, roi2 = cv2.stereoRectify(cameraMatrix_l, distCoeffs_l,cameraMatrix_r, distCoeffs_r,img_size, R, T)# 计算映射参数map1_l, map2_l = cv2.initUndistortRectifyMap(cameraMatrix_l, distCoeffs_l, R1, P1, img_size, cv2.CV_32FC1)map1_r, map2_r = cv2.initUndistortRectifyMap(cameraMatrix_r, distCoeffs_r, R2, P2, img_size, cv2.CV_32FC1)# 应用映射并显示结果rectified_img_l = cv2.remap(img_left, map1_l, map2_l, cv2.INTER_LINEAR)rectified_img_r = cv2.remap(img_right, map1_r, map2_r, cv2.INTER_LINEAR)# 合并图像显示combined_img = np.hstack((rectified_img_l, rectified_img_r))cv2.imshow('Rectified Images', combined_img)cv2.waitKey(0)cv2.destroyAllWindows()# 设置路径和文件名
left_image_path = "C:/new_pycharm_project/yolov10-main/shuangmu_left_pic/left_image0.png"
right_image_path = "C:/new_pycharm_project/yolov10-main/shuangmu_right_pic/right_image0.png"
calibration_file = "C:/new_pycharm_project/yolov10-main/calibration_parameters.yaml"# 调用函数进行图像矫正
rectify_images(left_image_path, right_image_path, calibration_file)结果对比:


第一张是矫正前的左右相机图像,第二张是矫正后的。可以看到去除了畸变,并且两图像基本出于同一水平线。
相关文章:
【摄像头标定】双目摄像头标定及矫正-opencv(python)
双目摄像头标定及矫正 棋盘格标定板标定矫正 棋盘格标定板 本文使用棋盘格标定板,可以到这篇博客中下载:https://blog.csdn.net/qq_39330520/article/details/107864568 标定 要进行标定首先需要双目拍的棋盘格图片,20张左右,…...
)
PostgreSQL 高可用性与容错性(十三)
1. 备份与恢复策略 1.1 数据备份 1.1.1 基于 pg_dump 的逻辑备份 pg_dump -U username -d dbname -f backup_file.sql 1.1.2 基于 pg_basebackup 的物理备份 pg_basebackup -U username -D /path/to/backup/directory -Ft -Xs -P -R 1.2 恢复数据库 1.2.1 恢复逻辑备份 …...
RabbitMQ的WorkQueues模型
WorkQueues模型 Work queues,任务模型。简单来说就是让多个消费者绑定到一个队列,共同消费队列中的消息。 当消息处理比较耗时的时候,可能生产消息的速度会远远大于消息的消费速度。长此以往,消息就会堆积越来越多,…...

【LeetCode】每日一题:最大子数组和
给你一个整数数组 nums ,请你找出一个具有最大和的连续子数组(子数组最少包含一个元素),返回其最大和。 子数组是数组中的一个连续部分。 解题思路 要注意最小值是整个前缀,主要是cumsum然后按照买卖股票的思路做的&a…...
什么是进程?
前言👀~ 上一章我们介绍了计算机组成的入门知识,了解这些之后,今天来聊聊进程 进程 PCB pcb中的常见属性 进程调度 进程的状态 进程的优先级 上下文 记账信息 虚拟地址空间 如果各位对文章的内容感兴趣的话,请点点小赞&a…...

后端返回base64文件流下载
后端返回base64文件流: 前端处理: downloadTemplate () {this.$API.downloadTemplate().then(({ data }) > {const binaryString atob(data) // 解码base64字符串const byteArray new Uint8Array(binaryString.length) // 创建一个Uint8Arrayfor (let i 0; i…...

云原生面试
云原生面试 Kubernetes原理Kubernetes 如何保证集群的安全性。简述 Kubernetes 准入机制简述Kubernetes Secret 有哪些使用方式简述Kubernetes PodSecurityPolicy机制简述Kubernetes PodSecurityPolicy机制能实现哪些安全策略简述Kubernetes 网络策略原理简述Kubernetes 数据持…...
深度学习入门2—— 神经网络的组成和3层神经网络的实现
由上一章结尾,我们知道神经网络的一个重要性质是它可以自动地从数据中学习到合适的权重参数。接下来会介绍神经网络的概要,然后再结合手写数字识别案例进行介绍。 1.神经网络概要 1.1从感知机到神经网 我们可以用图来表示神经网络,我们把最…...
tensorflow学习:错误 InternalError: Dst tensor is not initialized
tensorflow学习:错误 InternalError: Dst tensor is not initialized_dst tensor is not initialized.-CSDN博客https://blog.csdn.net/wanglitao588/article/details/77033659...

Docker环境安装anythingllm
拉镜像 docker pull mintplexlabs/anythingllm建目录 export STORAGE_LOCATION$HOME/anythingllm && \ mkdir -p $STORAGE_LOCATION && \ touch "$STORAGE_LOCATION/.env"检查目录具有写权限 # 为目录anythingllm赋写权限 chmod 777 anythingllm 启…...

FEC 向前纠错编码
随写,看的有点杂,简单记一下。 应该叫ReedSolomon FEC RS算法简单来讲就是,根据已有数据,构造模型,然后根据模型判纠错? 简单来讲,两点确定一条直线,直线直线上的点都会满足 y kx…...
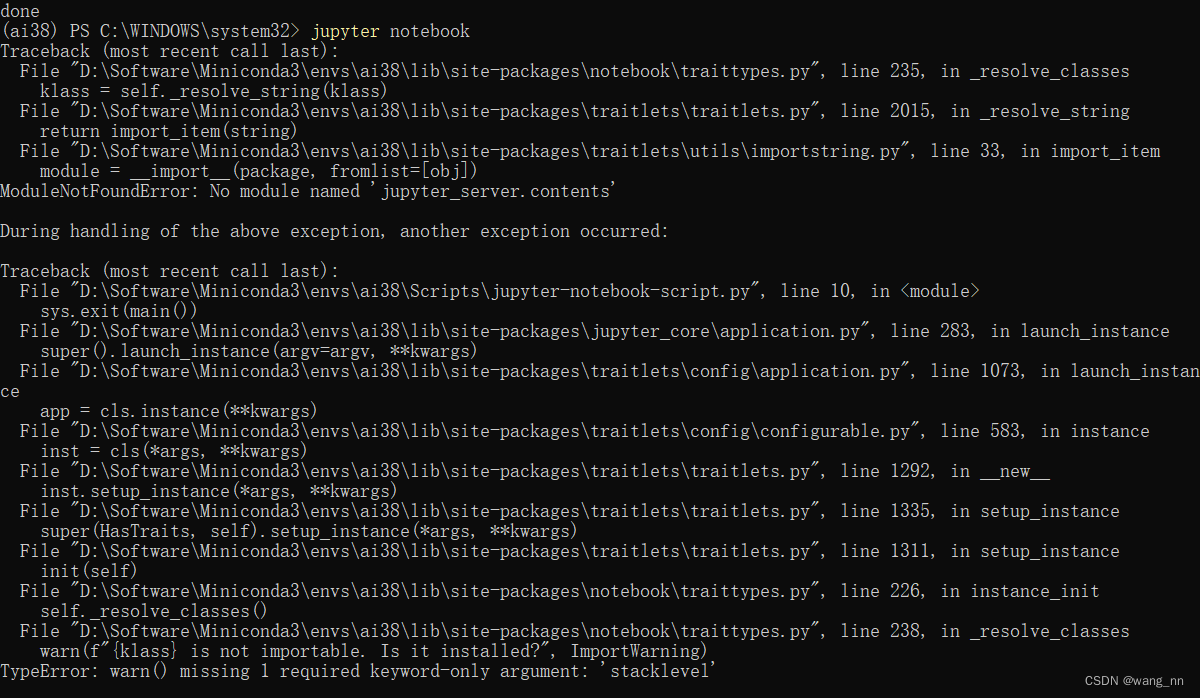
【jupyter notebook】解决打不开以及安装扩展插件的问题
文章目录 问题描述问题 1解决问题 2解决 问题描述 问题 1 在自定义的虚拟环境下,安装 jupyter notebook 6.4.12 版本时,报以下错误: 解决 查了一些 解决方法,执行以下命令即可解决: conda install traitlets5.9.0 …...

Perl文件句柄深度解析:掌握文件操作的核心
Perl中的文件句柄是进行文件输入输出操作的关键。它们提供了一种机制,允许Perl脚本打开文件、读写数据、定位文件指针,以及关闭文件。理解文件句柄的使用对于编写高效的Perl脚本至关重要。本文将深入探讨Perl文件句柄的概念、使用方法和最佳实践。 1. 文…...
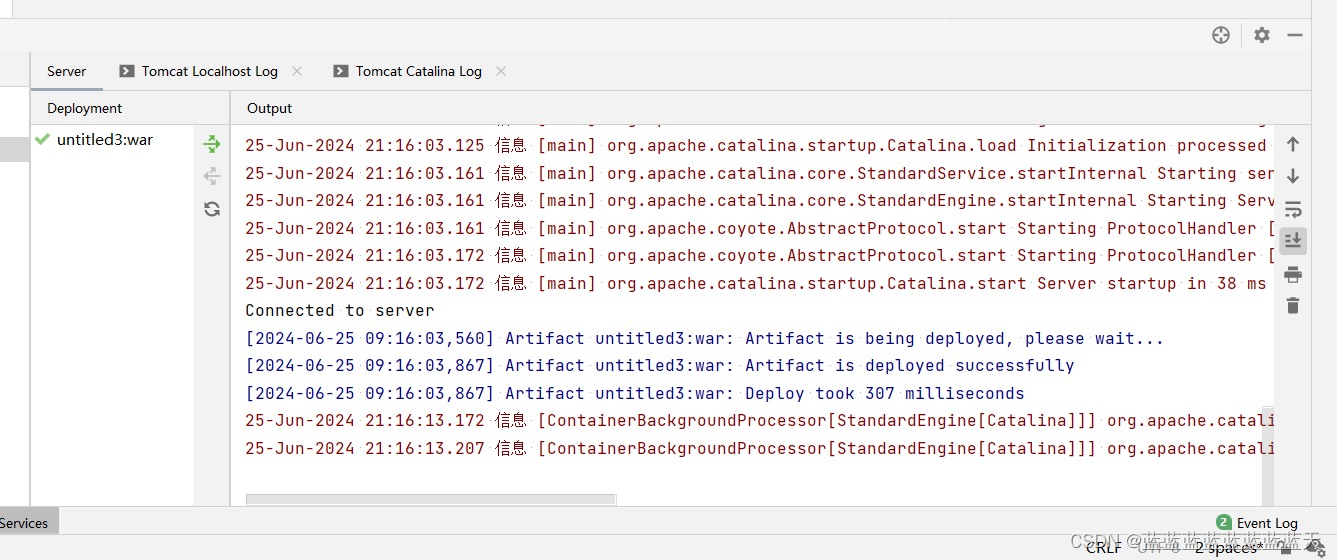
Tomcat 下载部署到 idea
一、下载Tomcat Tomcat 是Apache 软件基金会(Apache Software Foundation)下的一个核心项目,免费开源、并支持Servlet 和JSP 规范。属于轻量级应用服务器,在中小型系统和并发访问用户不是很多的场合下被普遍使用,是开发…...

FutureTask如何使用?
FutureTask是Java中的一个具体类,它实现了RunnableFuture接口,该接口结合了Runnable和Future的功能。FutureTask可以用于表示一个可以取消的异步计算。FutureTask非常适合用于与Executor框架一起使用,但也可以单独使用。 FutureTask的基本用…...
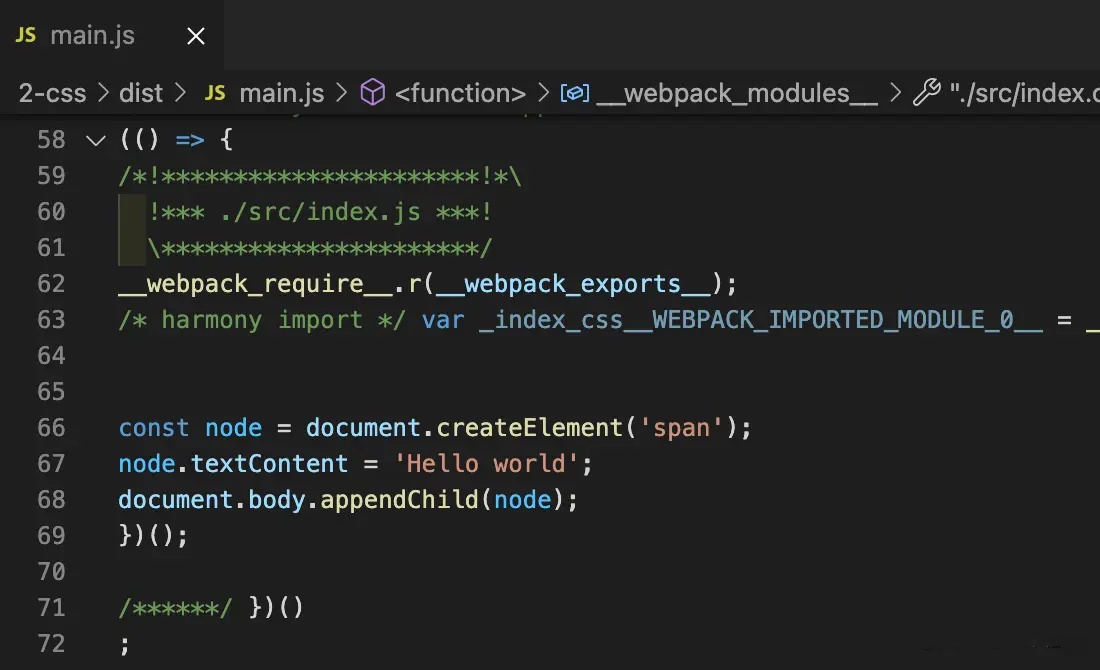
Webpack: 如何借助预处理器、PostCSS 等构建现代 CSS 工程环境
概述 在开发 Web 应用时,我们通常需要编写大量 JavaScript 代码 —— 用于控制页面逻辑;编写大量 CSS 代码 —— 用于调整页面呈现形式。问题在于,CSS 语言在过去若干年中一直在追求样式表现力方面的提升,工程化能力薄弱ÿ…...

一篇文章告诉你如何正确使用chatgpt提示词
在chatgpt大火的时候,出现了一波学习chatgpt提示词的热潮,互联网出现很多了使用的学习提示词的课程。其中我觉得斯坦福大学教授吴恩达博士推出prompt engineer课最全面。接下来总结他课程中正确使用提示词工程的方法。 1. 明确目标 明确你希望ChatGPT完…...

qt基于QGraphicsView的屏幕旋转
一、代码实现 实现代码示例 MainWindow2 w;QGraphicsScene *scene new QGraphicsScene;QGraphicsProxyWidget *gw scene->addWidget(&w);// 旋转角度gw->setRotation(90);QGraphicsView *view new QGraphicsView(scene);//view->resize(1024, 600);//scene-&g…...
一个土木工程专业背景的开发者,讲述开源带给他的力量
在前段时间我们举办的“TDengine Open Day”第一季技术沙龙中,TDengine 应用研发高级工程师谭雪峰进行的“开源之路:程序员的成长与探索”主题分享获得了众多参会者的好评。谭雪峰从自身独特的职业发展经历出发,分享了自己在开源领域的种种收…...
express+vue在线im实现【四】
往期内容 expressvue在线im实现【一】 expressvue在线im实现【二】 expressvue在线im实现【三】 本期示例 本期总结 支持了音频的录制和发送,如果觉得对你有用,还请点个免费的收藏与关注 下期安排 在线语音 具体实现 <template><kl-dial…...

3分钟掌握Joy-Con Toolkit:让你的Switch手柄焕然一新的终极指南
3分钟掌握Joy-Con Toolkit:让你的Switch手柄焕然一新的终极指南 【免费下载链接】jc_toolkit Joy-Con Toolkit 项目地址: https://gitcode.com/gh_mirrors/jc/jc_toolkit 还在为单调的Joy-Con手柄配色而烦恼吗?Joy-Con Toolkit为你带来了一键改变…...

原来选对床垫还能改善全家睡眠质量?
选对床垫,改善全家睡眠质量的秘密在快节奏的现代生活中,良好的睡眠质量变得越来越重要。一张合适的床垫不仅能提升个人的睡眠体验,还能改善全家人的睡眠质量。本文将探讨如何选择适合全家人的床垫,并重点介绍美德丽床垫的独特优势…...

RStudio 2026最新版下载:一键直达官网,解锁数据分析新体验
RStudio免费版安装包下载地址:RStudio安装包 RStudio 是 R 语言专用的集成开发环境,简单说就是 R 语言的 “超级工作台”。它不替代 R 语言,而是必须搭配 R 语言使用,负责把 R 语言的能力可视化、流程化、高效化。 RStudio 的核心…...

原神帧率解锁终极指南:免费突破60FPS限制的完整教程
原神帧率解锁终极指南:免费突破60FPS限制的完整教程 【免费下载链接】genshin-fps-unlock unlocks the 60 fps cap 项目地址: https://gitcode.com/gh_mirrors/ge/genshin-fps-unlock 原神帧率解锁工具(genshin-fps-unlock)是一款开源…...

命令行代码片段管理器:提升开发效率的智能工具实践
1. 项目概述:一个为开发者量身定制的代码片段管理工具 如果你和我一样,每天在多个项目、多种编程语言之间反复横跳,那你一定对“代码片段复用”这件事又爱又恨。爱的是,那些精心打磨过的工具函数、配置模板、业务逻辑块࿰…...

动态光照技术在视觉触觉传感器中的应用与优化
1. 视觉触觉传感器技术概述 视觉触觉传感器(Vision-Based Tactile Sensors, VBTS)是机器人触觉感知领域的重要技术突破。这类传感器通过光学成像方式捕捉弹性体接触面的微观变形,将机械接触转化为可视化数据。与传统力传感器相比,…...

中小团队如何利用Taotoken统一管理多个AI模型的API调用
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 中小团队如何利用Taotoken统一管理多个AI模型的API调用 对于需要协调使用多个大模型的中小开发团队而言,一个常见的工程…...

长期使用Taotoken服务在稳定性与响应速度上的综合体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期使用Taotoken服务在稳定性与响应速度上的综合体验 在持续数月的日常开发与测试工作中,我们团队将多个项目的大模型…...

如何在Windows上快速安装ViGEmBus虚拟手柄驱动:终极指南
如何在Windows上快速安装ViGEmBus虚拟手柄驱动:终极指南 【免费下载链接】ViGEmBus Windows kernel-mode driver emulating well-known USB game controllers. 项目地址: https://gitcode.com/gh_mirrors/vi/ViGEmBus 想要在Windows电脑上畅玩所有游戏&#…...

ArcSWAT建模踩坑记:你的土壤数据库参数算对了吗?聊聊SPAW的那些默认值和单位陷阱
ArcSWAT土壤参数校准实战:避开SPAW计算中的5个致命误区 当水文模拟结果与实测数据出现系统性偏差时,经验丰富的建模者会首先检查土壤参数——这个隐藏在界面背后的"沉默变量"往往是误差的最大来源。SPAW作为ArcSWAT推荐的土壤参数计算工具&…...