【仿真】UR机器人相机标定、立体标定、手眼标定、视觉追踪(双目)
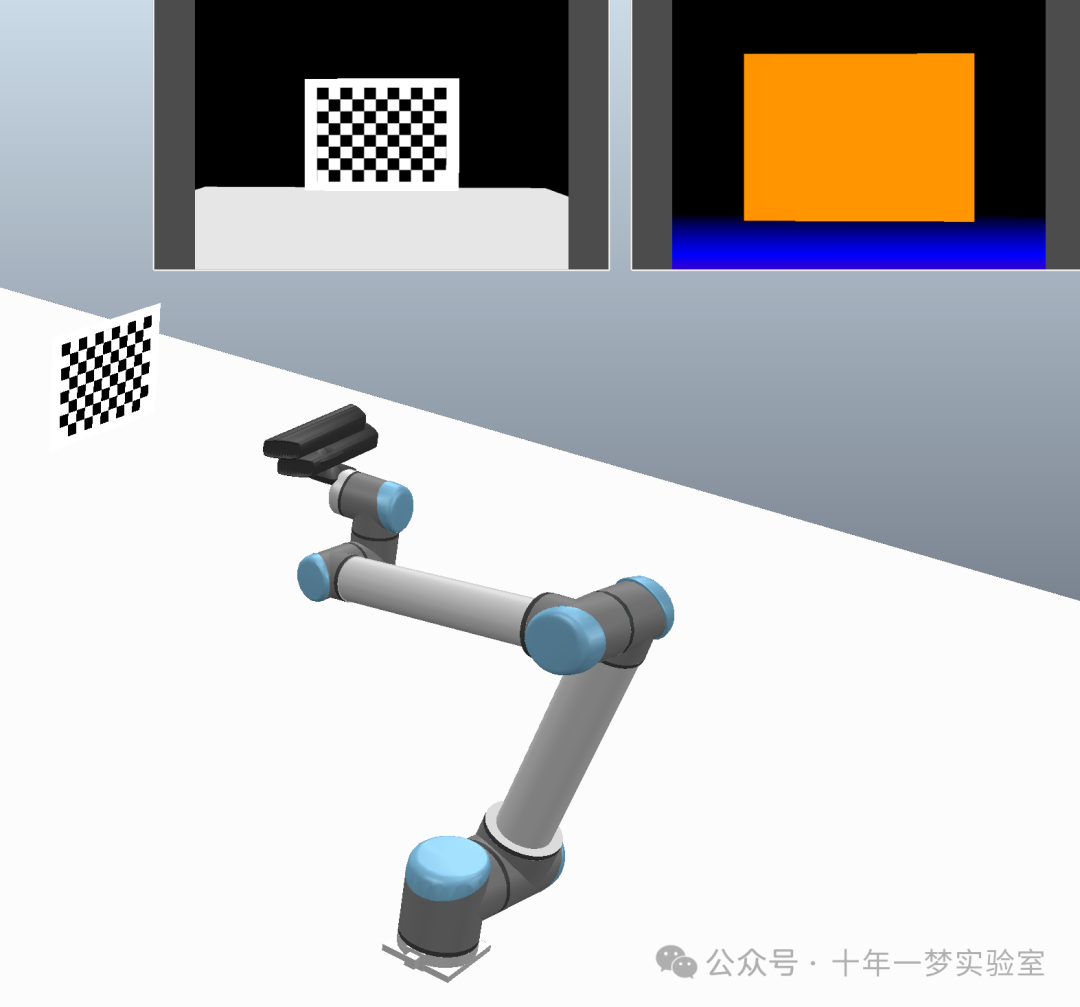
实现在CoppeliaSim环境中进行手眼标定和目标追踪的一个例子。它主要涉及到机器人、机器视觉和控制算法的编程,使用了Python语言。接下来对该代码的主要类和方法进行解析:
1. 导入相关库
用于与CoppeliaSim模拟器通过ZeroMQ接口通信。
包含
Rotation类,用于执行各种旋转和方向变换操作。OpenCV库,用于执行各种图像处理和计算机视觉任务。
用于执行各种数学和矩阵运算。
用于进行图像和数据的可视化。
用于创建和操作迭代对象的库。
用于实现与时间相关的功能。
2. 定义全局变量
分别用于定义场景路径、等待间隔、超时时间、接受的旋转误差、接受的平移误差、接受的停止速度阈值。
3. 定义主要的方法和步骤
连接到CoppeliaSim模拟器。
获取模拟器中对象的句柄。
从摄像头获取图像,并将其转换为OpenCV的BGR格式。
设置从一个坐标帧到另一个坐标帧的变换矩阵。
获取从一个坐标帧到另一个坐标帧的变换矩阵。
计算实际位姿与目标位姿之间的误差。
等待机器人移动到目标位姿,直到误差足够小或超时。
设置目标位姿并等待机器人移动完成。
4. 实施手眼标定和目标追踪
使用二维码检测来定位目标,然后进行相机标定和手眼标定计算。
计算机器人末端和摄像头之间的相对位姿。
实现了一系列的图像获取和处理,利用OpenCV库进行棋盘角点的提取。
通过实验获取数据,计算相机内部参数和两个相机之间的位姿。
实现了基于不同位姿下的图像集合进行手眼标定。
完成了在模拟器中交互式地跟踪目标的过程。
5. 保存与加载数据
使用方法来压缩和保存相关数据,以便后续的分析和使用。
本代码的特点在于它结合了机器人控制、图像处理、手眼标定和交互式目标追踪等多个领域的技术,是一套完整的解决方案。
视频演示
源码解析
函数
1. 通过ZeroMQ远程API连接到CoppeliaSim:创建客户端实例,获取CoppeliaSim API的实例,停止当前模拟,加载模拟场景,开始模拟,返回客户端和sim实例
2. 获取对象句柄: 获取机器人基座的句柄,获取机器人末端执行器的句柄,获取第一个相机的句柄,获取第二个相机的句柄,获取目标球的句柄
3. 定义从CoppeliaSim视觉传感器获取图像并转换为OpenCV格式的BGR图像的函数:从指定相机获取图像数据,将获取的图像数据转换为NumPy数组并重塑为正确的形状,将图像在垂直方向上翻转,以符合OpenCV的图像显示方式
4. 定义设置给定对象在某个参考框架下的位姿(位置和姿态)的函数:设置对象的变换矩阵,以定义其位置和方向
5. 定义获取给定对象在某个参考框架下的位姿的函数:初始化为4x4的单位矩阵,获取对象的变换矩阵并重塑,组成位姿矩阵
6. 定义计算两个位姿之间误差的函数:计算平移误差,计算旋转误差,将旋转误差转换为角度
7.定义等待机器人移动到目标位姿的函数:记录开始时间,初始化误差值为无穷大,计算已经经过的时间,如果超时则返回失败,等待一定时间,获取当前位姿,获取当前速度,计算线速度均值,计算角速度均值,计算误差,如果误差小于阈值且速度接近零,则返回成功
8. 定义设置目标位姿并等待机器人移动完成的函数:设置目标位姿,等待机器人移动到目标位姿并返回结果
主程序
########## 定义场景路径、等待间隔、超时时间以及接受的误差
设置NumPy打印选项
定义场景路径
定义等待时间间隔,单位秒
定义超时时间,单位秒
接受的旋转误差阈值
接受的平移误差阈值
接受的停止速度阈值
连接到CoppeliaSim并开始模拟
获取必要的句柄
########### 设置图像的检测、摄像机标定参数,并检测棋盘格角点
初始化棋盘格检测所需的终止条件:设置寻找亚像素角点的精确度和最大迭代次数,设置相机标定时需要固定的参数
设置棋盘格的尺寸和单位长度:棋盘格的行和列,示例尺寸,根据实际需要调整,单位长度,以米为单位,初始化棋盘格的三维坐标,设置棋盘格上每个点的x,y坐标,z坐标默认为0
从第一个相机获取BGR图像
获取图像的高度和宽度
将图像从BGR转换为灰度图
寻找棋盘格角点
对角点坐标进行精确化
在图像上绘制并显示棋盘格角点
获取机器人末端执行器的原始位姿
定义平移和旋转参数
构建平移和旋转矩阵
设置末端执行器到目标位姿并等待动作完成
显示相机1获取的图像
将末端执行器复位到原始位姿
显示相机1获取的图像
显示相机2获取的图像
########### 构建多个位姿变换矩阵,以便在手眼标定实验中使用
定义平移和旋转的范围
根据定义的范围生成一系列变换矩阵
计算生成的变换矩阵数量
########### 使用生成的位姿变换矩阵收集用于手眼标定的数据
初始化相机1、2图像点和对象点的列表,用于相机标定
定义机器人末端执行器的位姿列表、相机1拍摄的图像列表、相机2拍摄的图像列表
遍历所有预设的变换矩阵:{计算目标位姿,移动机器人末端执行器到目标位姿,如果移动失败,则跳过此次循环。获取当前机器人末端执行器的位姿,从相机1获取图像,并找到棋盘格角点,显示找到的角点,从相机2获取图像,并找到棋盘格角点,显示找到的角点,将找到的角点和对应的对象点分别存入列表,将图像存入相应列表}
计算成功捕获棋盘格角点的图像数量
########### 对两个相机分别进行标定获取内参和畸变系数
分别对两个相机进行标定,获取相机内参矩阵和畸变系数
输出相机内参矩阵和畸变系数
########### 进行立体标定获取两相机之间的旋转和平移矩阵
进行立体标定,获取两个相机间的相对位姿关系()

从仿真场景获取两个相机间的位姿关系
########### 初始化手眼标定所需的矩阵列表
初始化手眼标定所需的数据结构:{机器人夹持器到基座的旋转矩阵列表, 标定板到相机的旋转矩阵列表,机器人夹持器到基座的平移向量列表,标定板到相机的平移向量列表 }
############ 遍历采集的相机1每个图像点、对象点、末端执行器位姿以及图像
遍历每组图像点、对象点、末端执行器位姿以及图像:{ 使用solvePnP求解标定板相对于相机的位姿,在图像中绘制坐标轴并显示,构造标定板到相机的变换矩阵,将求解得到的旋转矩阵和平移向量添加到列表中 }
使用cv2.calibrateHandEye进行相机1手眼标定,求解夹持器到相机1的变换矩阵

输出夹持器到相机1的变换矩阵
定义OpenGL到OpenCV的坐标系统转换矩阵
从场景获取末端执行器到相机1的位姿,并进行坐标系统转换
根据立体标定结果计算夹持器到第二个相机的变换矩阵
从场景获取末端执行器到相机2的位姿,并进行opengl到opencv坐标系统转换
将所有标定数据保存到压缩文件中,以备后用
########### 为机器人对目标进行跟踪做准备
定义一系列位姿变换,用于测试不同的目标位姿
定于存储所有生成的变换矩阵列表
根据上述定义的范围生成一系列变换矩阵
向棋盘格中心的位姿变换
向后(z负向)的位姿变换
棋盘格基座的获取
获取并输出棋盘格的原始位姿
将机器人末端执行器和棋盘格复位到原始位姿
将棋盘格复位到原始位姿
########### 在相机1视角下,机器人对目标进行跟踪
初始化变换矩阵和图像列表,用于存储相机1当前位姿、下一位姿和各位姿对应的图像:存储当前机器人末端执行器的位姿、存储计算得到的下一步的机器人末端执行器位姿、存储相机1拍摄的图像列表
遍历所有预先定义的位姿变换矩阵【实现了在相机1视角下对棋盘格位姿跟踪和视觉处理的自动化实验,为机器人视觉系统的测试和校准提供了重要的数据支持】:{ 计算目标物体(棋盘格)的新位姿,移动棋盘格到新位姿、如果移动失败,则跳过此次循环,获取相机1图像并转换为灰度图像,寻找棋盘格角点,打印旋转和平移误差。精细化角点位置,使用solvePnP求解物体位姿,计算棋盘基座到相机的变换矩阵,应用向目标中心的位姿变换得到棋盘中心到相机的变换矩阵,可视化并显示旋转轴。获取机器人末端执行器当前位姿,计算新的末端执行器位姿,以便于下一次移动,添加当前末端执行器位姿到列表,添加计算得到的下一步位姿到列表,添加图像到列表,移动机器人末端执行器到新的位姿,拍摄并显示移动后的图像}
将机器人末端执行器和棋盘格复位到原始位姿
########### 在相机2视角下,机器人对目标进行跟踪
初始化变换矩阵和图像列表,用于存储相机2当前位姿、下一位姿和各位姿对应的图像:存储当前机器人末端执行器的位姿、存储计算得到的下一步的机器人末端执行器位姿、存储相机2拍摄的图像列表
遍历所有预先定义的位姿变换矩阵【实现了在相机2视角下对机器人位姿跟踪和视觉处理的自动化实验,为机器人视觉系统的测试和校准提供了重要的数据支持】:{计算目标物体(棋盘格)的新位姿、移动棋盘格到新位姿、如果移动失败,则跳过此次循环、获取相机2的图像、转换为灰度图像、寻找棋盘格角点、打印旋转和平移误差、精细化角点位置、使用solvePnP求解物体位姿、计算物体到相机的变换矩阵、应用向目标中心的位姿变换、可视化并显示旋转轴、获取机器人末端执行器当前位姿、计算新的末端执行器位姿,以便于下一次移动、添加当前末端执行器位姿到列表、添加计算得到的下一步位姿到列表、添加图像到列表、移动机器人末端执行器到新的位姿、拍摄并显示移动后的图像}
将收集的位姿和图像数据存储为压缩文件,方便后续使用
将机器人末端执行器和棋盘格复位到原始位姿
########### 在相机2视角下,机器人对目标进行交互式跟踪模拟
交互式跟踪模拟:{从相机2获取BGR图像、将图像转换为灰度图、
检测棋盘格角点、如果没有找到角点,继续下一次循环、通过子像素角点检测精细化角点位置、使用solvePnP算法求解物体位姿、如果solvePnP求解失败,继续下一次循环、初始化物体到相机的变换矩阵、根据旋转向量更新旋转矩阵、更新平移向量、应用向目标中心的位姿变换、获取当前机器人末端执行器的位姿、根据得到的相机位姿计算新的机器人末端执行器位姿、将机器人末端执行器移动到新的位姿}
作者陈晓永:智能装备专业高级工程师,软件工程师。机器人自动化产线仿真动画制作
The End
相关文章:
【仿真】UR机器人相机标定、立体标定、手眼标定、视觉追踪(双目)
实现在CoppeliaSim环境中进行手眼标定和目标追踪的一个例子。它主要涉及到机器人、机器视觉和控制算法的编程,使用了Python语言。接下来对该代码的主要类和方法进行解析: 1. 导入相关库 用于与CoppeliaSim模拟器通过ZeroMQ接口通信。包含Rotation类&…...
功能测试【测试用例模板、Bug模板、手机App测试★】
功能测试 Day01 web项目环境与测试流程、业务流程测试一、【了解】web项目环境说明1.1 环境的定义:项目运行所需要的所有的软件和硬件组合1.2 环境(服务器)的组成:操作系统数据库web应用程序项目代码1.3 面试题:你们公司有几套环境࿱…...

Android音频系统
最近在做UAC的项目,大概就是接收内核UAC的事件,也就是声音相关事件。然后就是pcm_read和AudioTrackr->write之间互传。感觉略微有点奇怪,所以简单总结一下。 1 UAC的简要流程 open_netlink_socket 打开内核窗口,类似于ioctl。…...
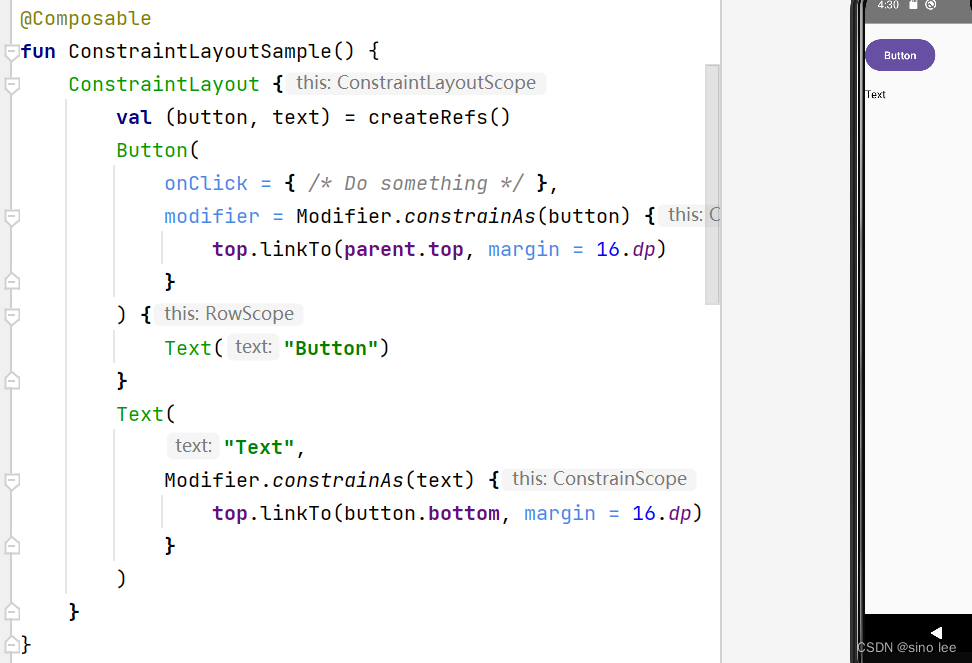
Android开发系列(九)Jetpack Compose之ConstraintLayout
ConstraintLayout是一个用于构建复杂布局的组件。它通过将子视图限制在给定的约束条件下来定位和排列视图。 使用ConstraintLayout,您可以通过定义视图之间的约束关系来指定它们的位置。这些约束可以是水平和垂直的对齐、边距、宽度和高度等。这允许您创建灵活而响…...

SpringMVC系列三: Postman(接口测试工具)
接口测试工具 💞Postman(接口测试工具)Postman介绍Postman是什么Postman相关资源Postman安装Postman快速入门Postman完成Controller层测试其它说明 💞课后作业 上一讲, 我们学习的是SpringMVC系列二: 请求方式介绍 现在打开springmvc项目 💞…...

项目实训-vue(十二)
项目实训-vue(十二) 文章目录 项目实训-vue(十二)1.概述2.处理进度可视化 1.概述 本篇博客将记录我在图片上传页面中的工作。 2.处理进度可视化 除了导航栏之外,我们还需要对上传图片以及图片处理的过程以及流程进行…...

达梦数据库的系统视图v$lock
达梦数据库的系统视图v$lock 在达梦数据库(DM)中,V$LOCK 系统视图用于查看当前数据库中的锁定状态。该视图提供了关于所有锁定详细信息,例如锁的内存地址、所属事务 ID,锁类型和锁模式等。这对于数据库管理员进行锁定…...

【无人机三维路径规划】基于树木生长算法TGA实现复杂城市地形下无人机避障三维航迹规划附Matlab代码
% 定义无人机起始位置和目标位置 start_point [0, 0, 0]; % 起始位置 [x, y, z] target_point [100, 100, 100]; % 目标位置 [x, y, z] % 定义城市地形和障碍物信息 city_map imread(‘city_map.png’); % 城市地形图像 obstacles [ 20, 30, 10; % 障碍物1位置 [x, y, z] …...

制造业工厂的管理到底有多难
一、引言 随着全球经济的不断发展,制造业作为实体经济的核心,对国家的经济增长起着至关重要的作用。然而,制造业工厂的管理却是一项复杂而艰巨的任务。本文将深入探讨制造业工厂管理所面临的挑战,并提出相应的应对策略。 二、制造…...
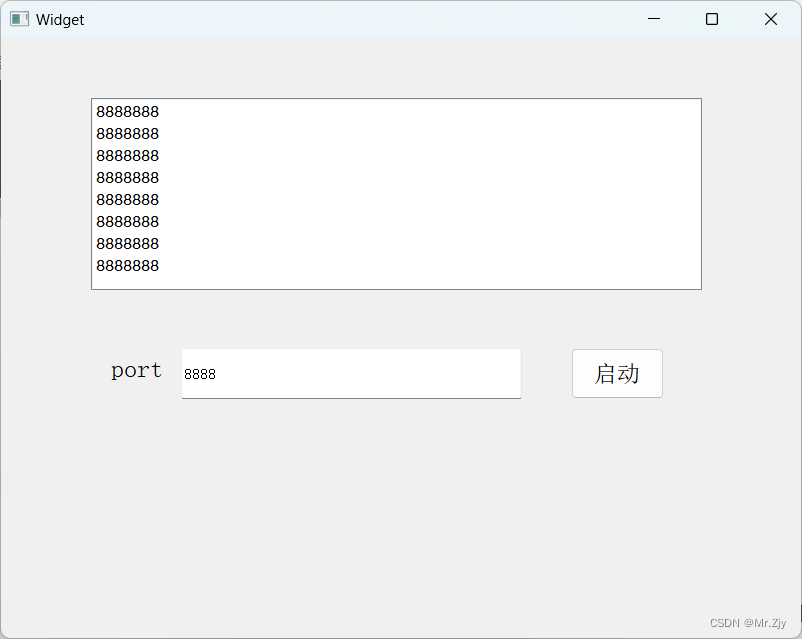
QTday5 2024-06-19
作业要求: 1.思维导图 2.整理代码:TCP服务器 作业1:思维导图 作业2:整理代码 运行代码: widget.h #ifndef WIDGET_H #define WIDGET_H#include <QWidget> #include <QTcpServer> #include <QList>…...

Node官网下载各个版本
node官网下载各个版本地址 例如 14.16.0 Index of /download/release/v14.16.0/...

备战秋招day4
算法 242. 有效的字母异位词 class Solution {public boolean isAnagram(String s, String t) {int[] count new int[26];for(int i 0;i<s.length();i){count[s.charAt(i)-a];}for(int i 0;i<t.length();i){count[t.charAt(i)-a]--;if(count[t.charAt(i)-a]<0){r…...
)
【华为OD机试B卷】服务器广播、需要广播的服务器数量(C++/Java/Python)
题目 题目描述 服务器连接方式包括直接相连,间接连接。 A和B直接连接,B和C直接连接,则A和C间接连接。 直接连接和间接连接都可以发送广播。 给出一个N*N数组,代表N个服务器, matrix[i][j] 1, 则代表i和j直…...
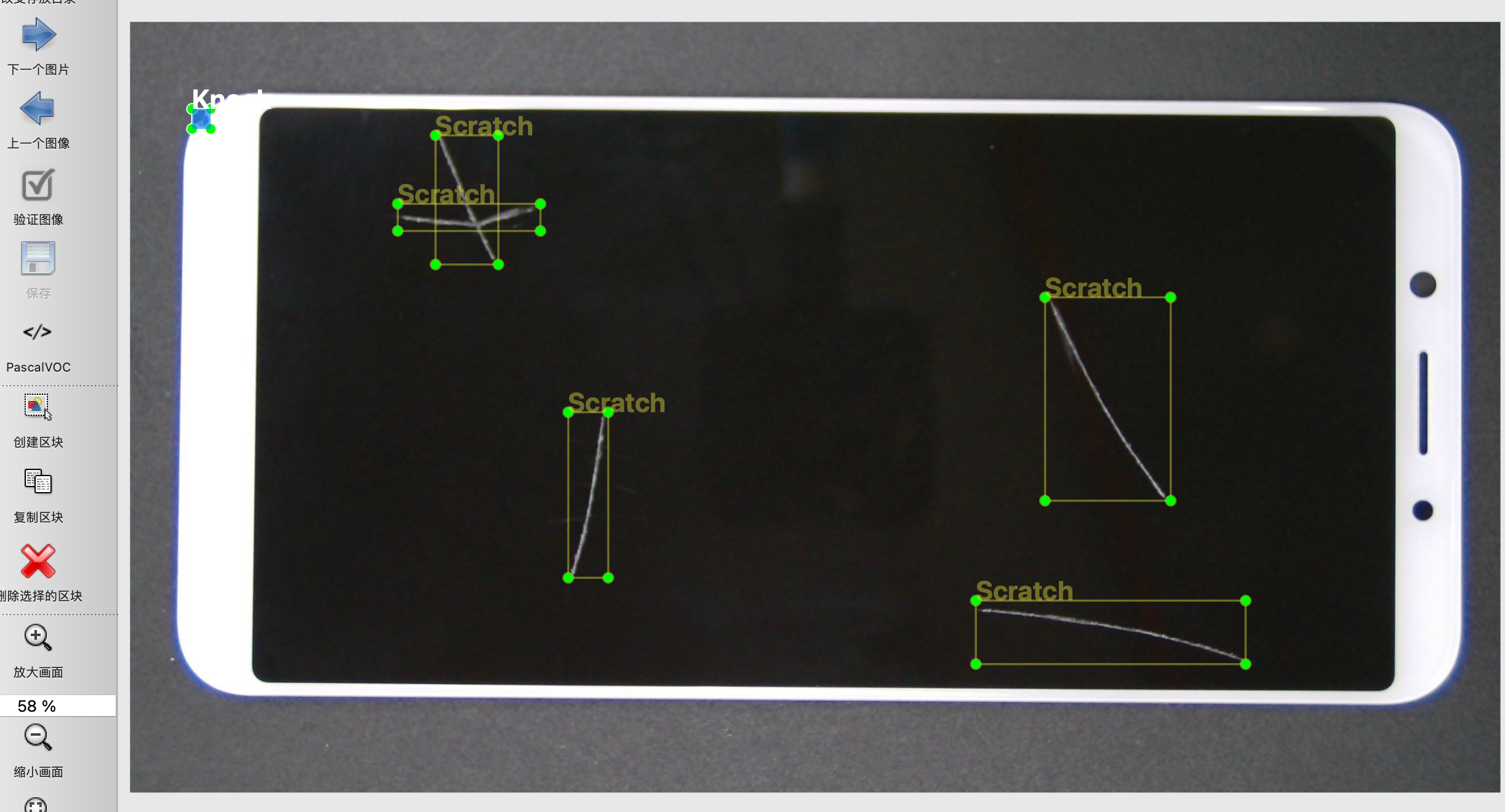
目标检测数据集 - 手机屏幕表面表面缺陷检测数据集下载「包含VOC、COCO、YOLO三种格式」
数据集介绍:手机屏幕表面缺陷检测数据集,真实采集高质量手机屏幕表面含缺陷图片数据,数据集含多款不同型号和品牌的手机屏幕表面图片数据,包括苹果手机屏、三星手机屏、华为手机屏等数据。数据标注标签包括 Bubble 气泡/水滴、Scr…...
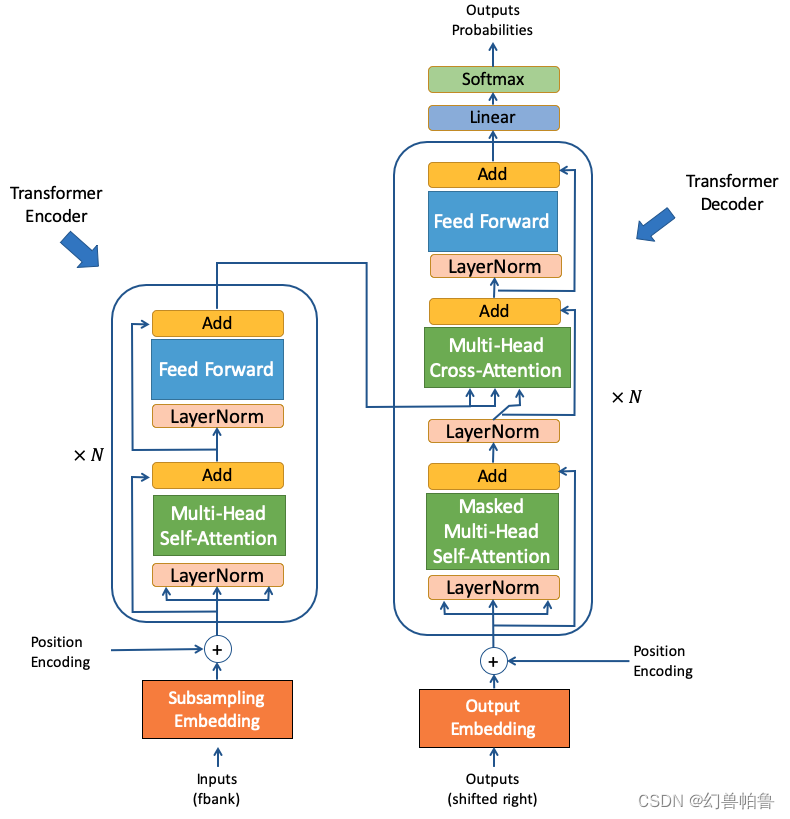
语音相关算法学习整理
最近看了一下百度paddlespeech的一些公开课,把课程里的视频内容大体听了一下,现在整理一下笔记。教程链接见:飞桨AI Studio星河社区-人工智能学习与实训社区 语音识别的过程可以这样简单概括: 将声音信号经过预加重、加窗、fft等…...
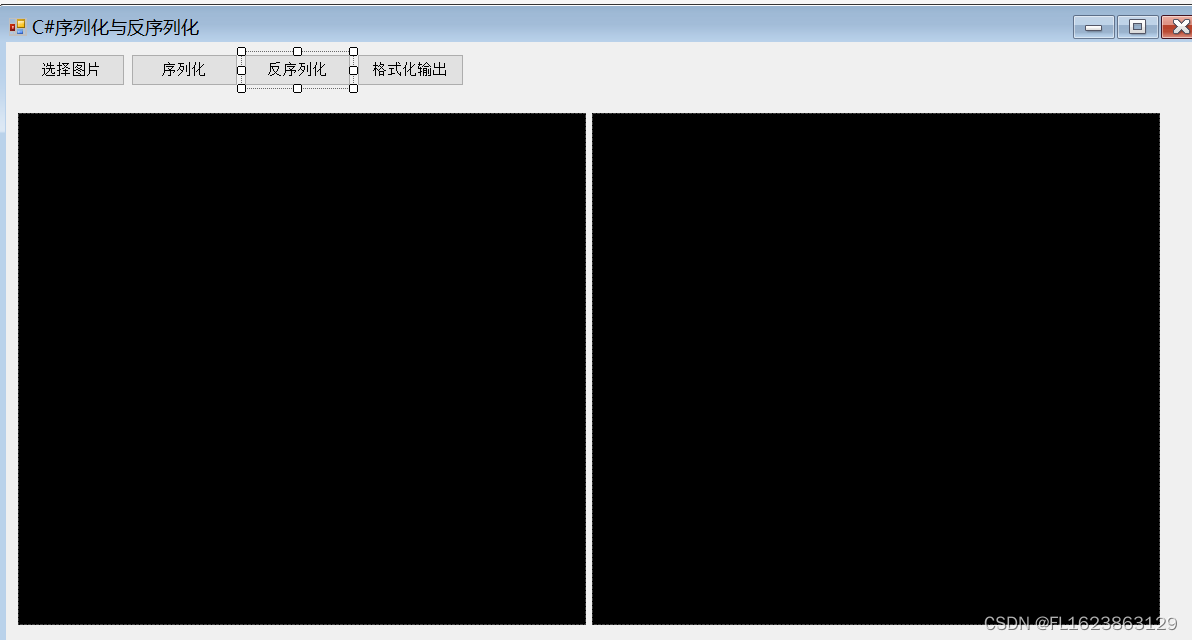
[C#] opencvsharp对Mat数据进行序列化或者反序列化以及格式化输出
【简要介绍】 在OpenCVSharp中,FileStorage类用于将数据(包括OpenCV的Mat类型数据)序列化为XML或YAML格式的文件,以及从这些文件中反序列化数据。以下是关于FileStorage类用法的详细说明: 写入数据(序列化…...

Linux中的TCP与UDP:理解两者的差异
在计算机网络的世界中,TCP(传输控制协议)和UDP(用户数据报协议)是两种至关重要的传输层协议。它们就像是我们日常生活中的通信方式,有着不同的使用场景和优缺点。通过一个简单的比喻,我们可以更…...
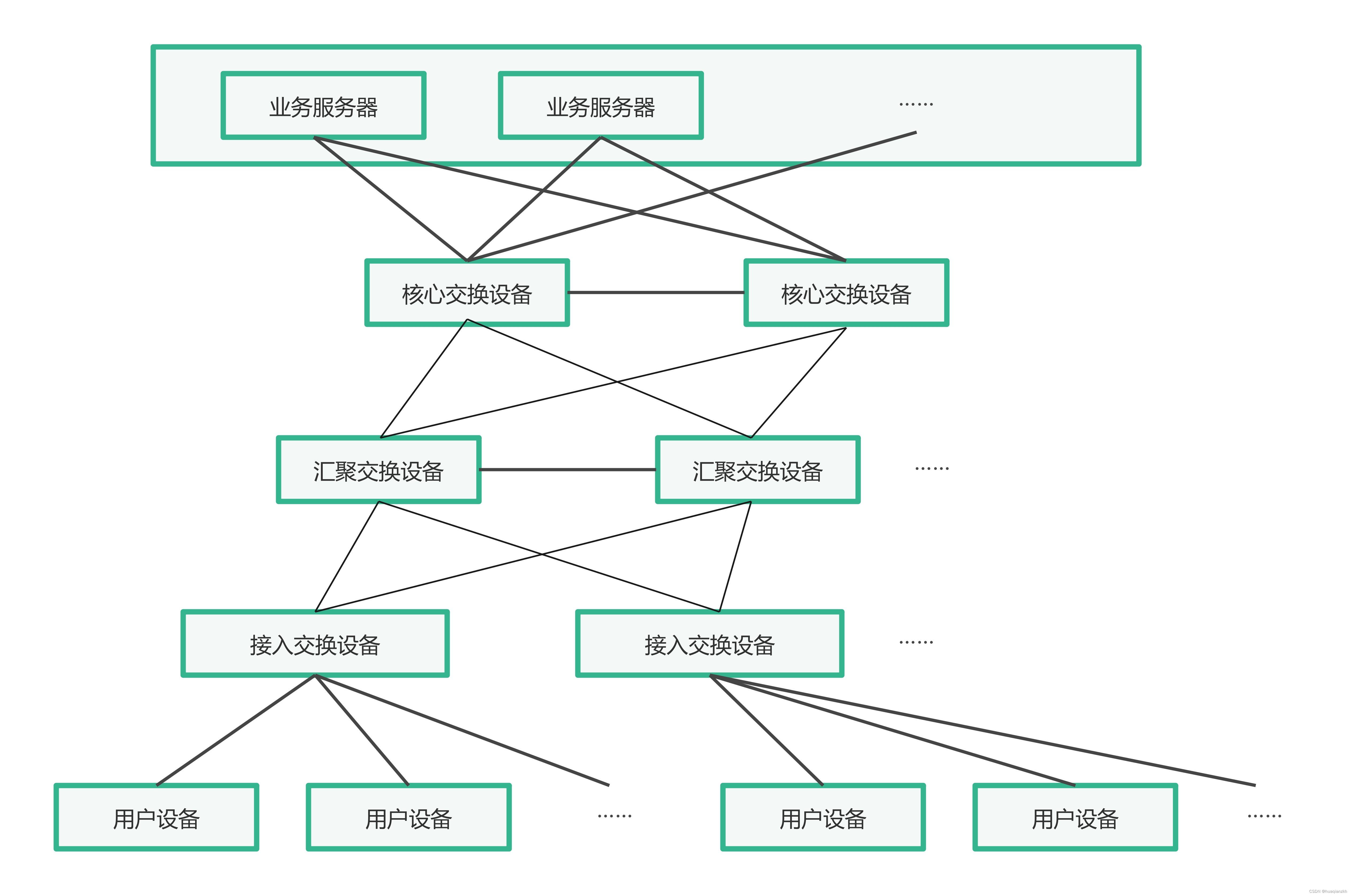
通信系统网络架构_1.局域网网络架构
当今,通信网络从大的方面主要包括局域网、广域网、移动通信网等网络形式。不同的网络会采用不同的技术进行网络构建。以下针对不同的网络给出各自的网络架构以及所采用的技术。 1.概述 局域网,即计算机局部区域网络,是一种为单一机构所拥有的…...
Pycharm 启动 Django项目 —— python篇
1、打开你的工程,在菜单栏里找到Run-->Edit Configurations 2、在打开的对话框里边选择Python,点击号 3.选择Python 4.出现了一个新的项Unnamed,你可以把它改名叫debug,好听一点 5.脚本选择你网站的manage.py,脚本参…...
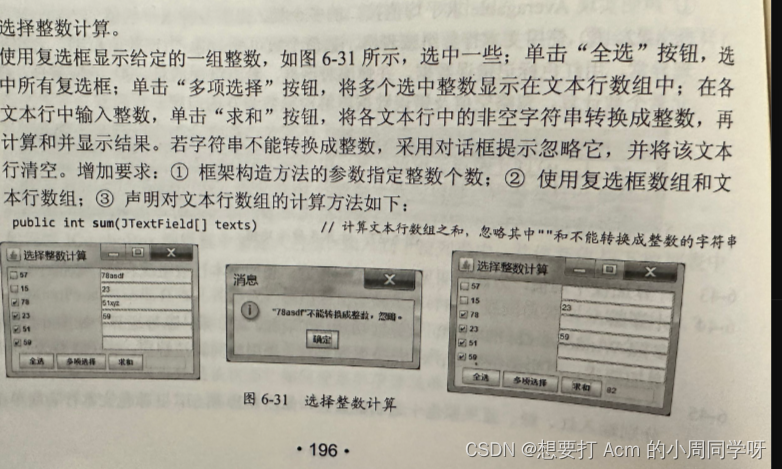
6-47选择整数计算
整数计算: 用swing组件来实现整数计算,需要对整数计算的值进行校验。 import javax.swing.*; import java.awt.*; import java.awt.event.*;public class IntegerCalculator extends JFrame implements ActionListener {private JCheckBox[] checkBoxe…...

告别激活弹窗:KMS_VL_ALL_AIO智能激活工具完全指南
告别激活弹窗:KMS_VL_ALL_AIO智能激活工具完全指南 【免费下载链接】KMS_VL_ALL_AIO Smart Activation Script 项目地址: https://gitcode.com/gh_mirrors/km/KMS_VL_ALL_AIO 还在为Windows系统激活烦恼吗?每次开机都看到"需要激活"的提…...
:Agentic RAG——让 Agent 主导检索过程)
RAG 系列(十七):Agentic RAG——让 Agent 主导检索过程
Pipeline RAG 的沉默失败 前面十几篇一直在优化一件事:怎么让检索结果更好。更好的分块、更精准的排序、更聪明的问法、CRAG 纠偏、Graph RAG 关系遍历…… 但有一件事始终没变:无论检索结果好不好,都会被传给 LLM 生成答案。 Pipeline RAG 的流程是线性的、固定的: 问…...

从SD卡初始化到读写文件:一个完整嵌入式项目中的SDIO驱动避坑实践
从SD卡初始化到读写文件:嵌入式SDIO驱动实战全解析 在嵌入式系统开发中,SD卡因其高容量、低成本和便携性成为数据存储的首选方案。然而,看似简单的SD卡接口背后隐藏着复杂的初始化协议和时序要求。许多工程师在项目初期都会遇到SD卡无法识别、…...

怎样免费让老Mac重获新生:OpenCore Legacy Patcher专业教程
怎样免费让老Mac重获新生:OpenCore Legacy Patcher专业教程 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 想让你的旧Mac重新焕发活力吗…...

Wand-Enhancer终极指南:免费解锁WeMod专业功能的完整解决方案
Wand-Enhancer终极指南:免费解锁WeMod专业功能的完整解决方案 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 还在为WeMod专业版的高昂订阅费…...

MTKClient终极指南:解锁联发科芯片调试的专业解决方案
MTKClient终极指南:解锁联发科芯片调试的专业解决方案 【免费下载链接】mtkclient MTK reverse engineering and flash tool 项目地址: https://gitcode.com/gh_mirrors/mt/mtkclient MTKClient作为一款专为联发科(MediaTek)芯片设计的…...

DownKyi技术架构解析:构建高性能B站视频下载引擎的工程实践
DownKyi技术架构解析:构建高性能B站视频下载引擎的工程实践 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等&…...

飞书自动化工具feishu-atuo:Python积木式开发与实战指南
1. 项目概述:飞书自动化,从零到一的效率革命 如果你和我一样,每天的工作流里都离不开飞书,那你肯定也经历过这些时刻:手动把日报、周报从文档复制到表格里归档;在多个群里重复发送同样的通知;为…...

大语言模型可靠性监测与压缩的谱方法研究
1. 大语言模型可靠性监测与压缩的谱方法研究概述在深度学习领域,大语言模型(LLM)和视觉语言模型(VLM)的可靠性问题与计算效率挑战日益凸显。模型幻觉(生成与输入无关或错误的内容)和分布偏移(面对训练数据分布外的输入时性能下降)会严重损害用户信任,而庞…...

从肌电信号到Arduino控制:MyoWare传感器实战指南
1. 项目概述:当肌肉“说话”,我们如何“倾听”?如果你玩过一些体感游戏,或者看过科幻电影里用意念控制机械臂的场景,心里大概会闪过一个念头:这玩意儿到底是怎么做到的?其实,很多酷炫…...