自动驾驶ADAS
1 ToF摄像头分类
1.1 ToF原理
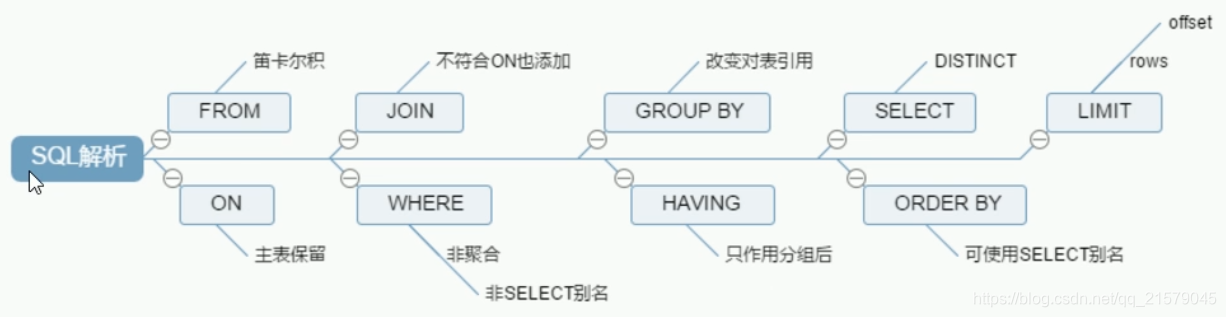
类似雷达测距,生成3D点云,或者叫3D贴图。ToF相机的分辨率一般在3万像素左右。ToF距离计算公式如图所示。
Figure 1-1 ToF距离计算公式
D:距离
c:光速
PHI:相位差
fmod:调制频率
1.2 3D结构光
生成点阵图像,类似打出光斑。
1.3 双目视觉
通过提前标定,利用视角差来计算。
2 超声波雷达USS
HC-SR04 (EM78P153A) which is a clone of a Devantech SRF04, SRF means Sonar Range Finder.
1)采用IO口TRIG触发测距,给至少10us的高电平信号;
2)模块自动发送8个40khz的方波,自动检测是否有信号返回;
3)有信号返回,通过IO口ECHO输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测量距离 = (高电平时间 x 声速 (340M/S)) / 2。
3 毫米波雷达RADAR
速度、距离和方位角(Azimuth)。毫米波雷达的角分辨率不够。通信方式一般采用CAN接口。
AWR1642
4 激光雷达LiDAR
4.1 通信接口
激光雷达一般使用网络通信。激光雷达使用Ku、K、Ka波段。
Velodyne UDP数据都是小端格式(src192.168.1.201, dst255.255.255.255)。
https://github.com/ros-drivers/velodyne
LMS111-10100
4.2 Flash固态激光雷达
Flash原本的意思为快闪。而Flash激光雷达的原理也是快闪,这种固态激光雷达像一个手电筒一样,发射一个面阵光,再通过高灵敏度的传感器绘制环境图像。
4.3 ADAS Camera Trigger
SerDes摄像头出图分两种:一种是给它上电,配置好了后,按设定的帧率自己出,这种称为master模式;另一种是给一次触发信号出一帧,这个trigger信号来至于激光雷达,这种称为slave模式。
SerDes摄像头数据和激光雷达要同步,时间对时通过Linux ptp4l,这时的摄像头出图采用slave模式,也就是需要激光雷达trigger。
5 SoC
Nvidia使用Aquaman系列中(aqua-拉丁词根,表示water)的名字命名Auto Drive。
6 ROS
6.1 ROS编译工具
- catkin
- ament
- colcon: collective construction
7 Abbreviations
导航雷达:转圈的横棍子,JRC
LiDAR: Light RADAR
OPT8241:TI ToF
PCL:Point Cloud Library,一个开源的软件库,包含大量与点云有关的算法,包括显示点云数据、滤波、分割、特征提取、配准、重建等,支持Windows和Linux等平台,也可以在一些嵌入式开发板上使用。PCL在三维点云中的地位相当于OpenCV在图像处理和计算机视觉中的地位
ROS catkin:ROS早期的创始实验室叫做Willow Garage,而柳树(Willow)的花属于catkin花序
ToF:Time of Flight
VCSEL:vertical cavity surface emitting laser,垂直腔面发射激光器
相关文章:
自动驾驶ADAS
1 ToF摄像头分类 1.1 ToF原理 类似雷达测距,生成3D点云,或者叫3D贴图。ToF相机的分辨率一般在3万像素左右。ToF距离计算公式如图所示。 Figure 1-1 ToF距离计算公式 D:距离 c:光速 PHI:相位差 fmod:调制频率…...

Python+Pytest+Allure+Yaml接口自动化测试框架详解
PythonPytestAllureYaml接口自动化测试框架详解 编撰人:CesareCheung 更新时间:2024.06.20 一、技术栈 PythonPytestAllureYaml 版本要求:Python3.7.0,Pytest7.4.4,Allure2.18.1,PyYaml6.0 二、环境配置 1、安装python3.7,并配置…...
python turtle 001画两只小狗
效果图: 代码: pythonturtle001画两只小狗资源-CSDN文库 # 作者V w1933423import turtle # 导入turtle模块def draw_dogs():turtle.setup(800, 800) # 设置画布大小为800x800p turtle.Pen() # 创建一个画笔对象p.pensize(14) # 设置画笔大小为14p.…...
『亚马逊云科技产品测评』程序员最值得拥有的第一台专属服务器 “亚马逊EC2实例“
授权声明:本篇文章授权活动官方亚马逊云科技文章转发、改写权,包括不限于在 Developer Centre, 知乎,自媒体平台,第三方开发者媒体等亚马逊云科技官方渠道 引言 自2006年8月9日,在搜索引擎大会(SES San Jo…...

python 趣味习题_递归函数(炸弹迷宫路径计算)
@[toc] python 学习中,常会遇到一些百思不得其解的难题,但有时“灵光一现”找准方法,难题便会迎刃而解。 本专栏旨在记录本人解决问题的思考方法,及实现过程。有更好方法或对程序执行有疑问的伙伴,可在评论区留言,共同讨论。 题目要求 题目描述:在一串连续的迷宫(房间…...

免费翻译API及使用指南——百度、腾讯
目录 一、百度翻译API 二、腾讯翻译API 一、百度翻译API 百度翻译API接口免费翻译额度:标准版(5万字符免费/每月)、高级版(100万字符免费/每月-需个人认证,基本都能通过)、尊享版(200万字符免…...
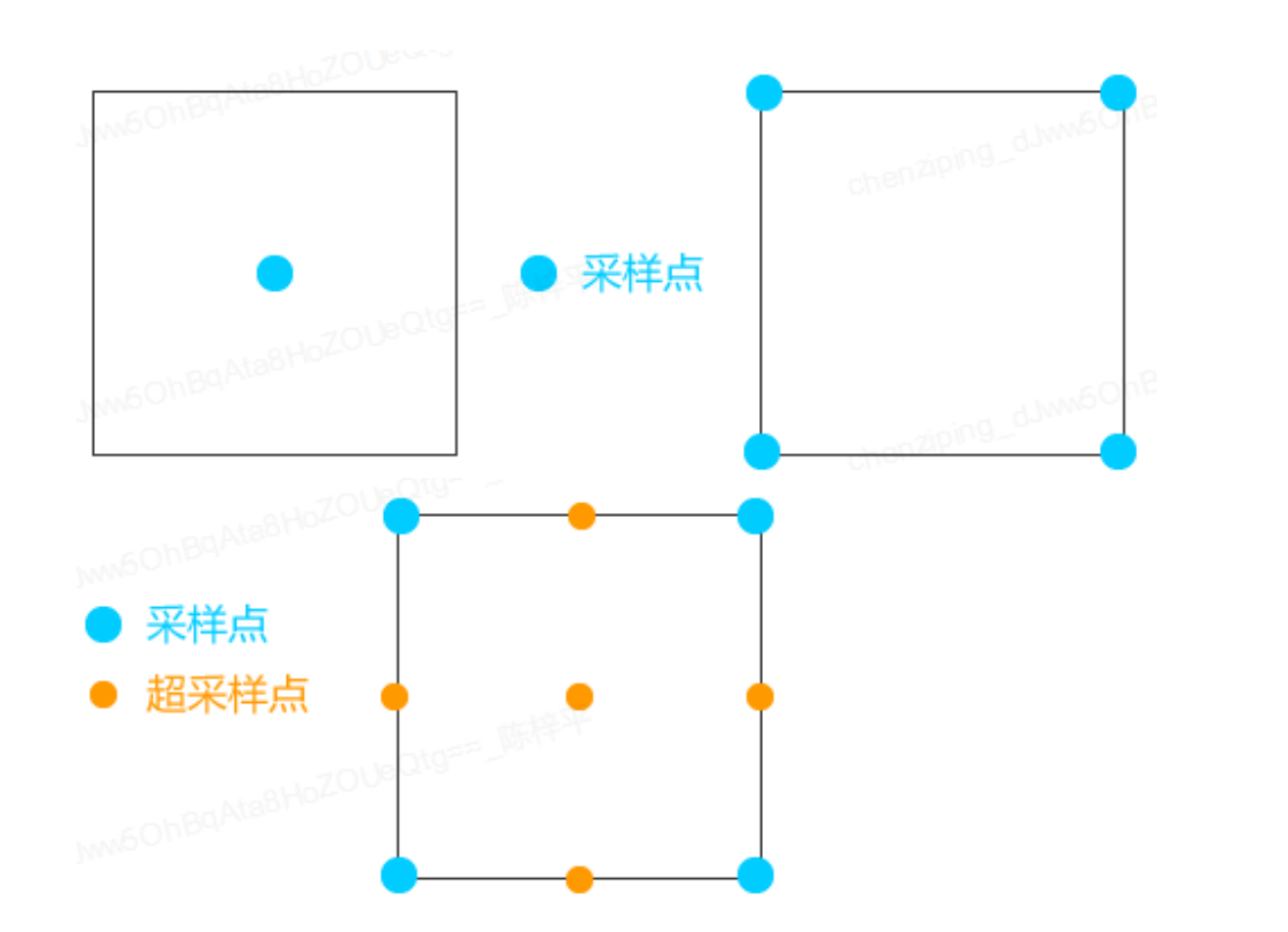
深度测试中的隐藏面消除技术
by STANCH 标签:#计算机图形学 #深度测试 #深度测试 #隐藏面消除 1.概述 根据我们的日常经验,近处的物体会挡住后面的物体,在三维场景中通常通过深度缓冲来实现这样的效果。深度缓冲记录着屏幕对应的每个像素的深度值。模型一开始所在的局部…...

oracle merge的使用
Oracle中的MERGE语句是一个非常强大的工具,它允许用户在一个SQL语句中同时执行INSERT和UPDATE操作。以下是关于Oracle MERGE语句的详细使用说明: 1. 基本语法 MERGE INTO target_table USING source_table ON (merge_condition) WHEN MATCHED THEN …...
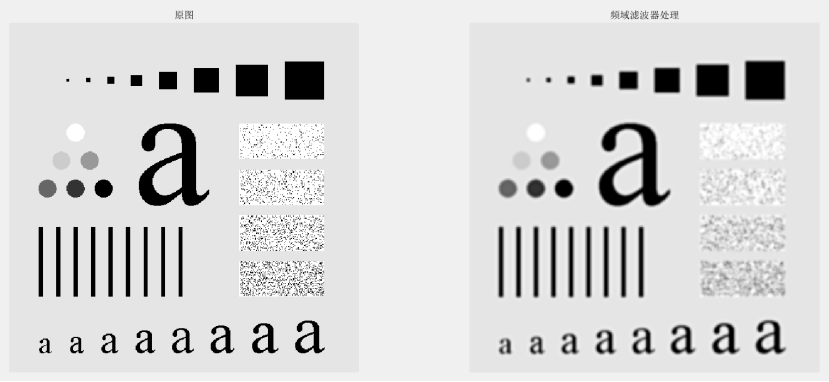
《数字图像处理》实验报告四
一、实验任务与要求 对 Fig0403.tif 进行傅里叶变换并显示其频谱图像;fft2(x) 对 Fig0405.tif 图像进行填充和非填充的高斯滤波,并观察其不同;paddedsize,fft2(x,m,n) 由 sobel 空间滤波算子生成相应的频率…...
算法04 模拟算法之一维数组相关内容详解【C++实现】
大家好,我是bigbigli,模拟算法我们将分为几个章节来讲,今天我们只看一维数组相关的题目 目录 模拟的概念 训练:开关灯 解析 参考代码 训练:数组变化 解析 参考代码 训练:折叠游戏 解析 参考代码 …...

【技术解码】百数SRM:如何助力企业快速优化供应链管理?
SRM应用是企业优化供应链管理的重要工具,它帮助企业全面管理供应商关系,从评估、选择到协同合作和绩效监控,确保供应链的稳定性和效率。 对于企业来说,通过全面管理供应商关系,可以降低采购风险,提升产品质…...

想要用tween实现相机的移动,three.js渲染的canvas画布上相机位置一点没动,如何解决??
🏆本文收录于「Bug调优」专栏,主要记录项目实战过程中的Bug之前因后果及提供真实有效的解决方案,希望能够助你一臂之力,帮你早日登顶实现财富自由🚀;同时,欢迎大家关注&&收藏&&…...
SQL连接与筛选:解析left join on和where的区别及典型案例分析
文章目录 前言数据库在运行时的执行顺序一、left join on和where条件的定义和作用left join on条件where条件 二、left join on和where条件的区别原理不同left join原理:where原理: 应用场景不同执行顺序不同(作用阶段不同)结果集…...

oliva-bruteforce-luks
olivaeasyLUKS v2破解、bruteforce-luks工具使用、cryptsetup使用、cap_dac_read_searcheip、mysql使用 主机发现 ┌──(kali㉿kali)-[~/桌面/OSCP] └─$ sudo netdiscover -i eth0 -r 192.168.44.148/24服务扫描 ┌──(kali㉿kali)-[~/桌面/OSCP] └─$ sudo nmap -sV -…...
图像超分辨率重建
一、什么是图像超分辨 图像超分辨是一种技术,旨在通过硬件或软件的方法提高原有图像的分辨率。这一过程涉及从一系列低分辨率的图像中获取一幅高分辨率的图像,实现了时间分辨率向空间分辨率的转换。超分辨率重建的核心思想是利用多帧图像序列的时间带宽来…...

小米上架遇到的隐私协议问题
1. 找到【APP权限设置】,点击详情,一一对照,删除没用的,新增小米商家必须要有的内容 2. APP 存在未经用户同意读取“OAID”的行为 uniapp官方文档对应内容处...

【区分vue2和vue3下的element UI Message 消息提示组件,分别详细介绍属性,事件,方法如何使用,并举例】
在 Vue 2 中,我们通常使用 Element UI 的 this.$message 方法来显示消息提示,而不是作为一个组件直接在模板中使用。然而,在 Vue 3 的 Element Plus 中,虽然 this.$message 的使用方式仍然保留,但官方文档可能更倾向于…...

架构设计 - Nginx Lua 缓存配置
摘要: web 应用业务缓存通常3级: 一级缓存:JVM 本地缓存 二级缓存:Redis集中式缓存 三级缓存:Nginx Proxy Cache 缓存 或 Nginx Lua 缓存 四级缓存:静态资源CDN缓存 页面静态化 本文主要分享 Nginx Lua 缓存配置开发 鉴于 Nginx Proxy Cache 缓存的劣势,在生产项目…...

lua的GC
关于lua的gc云风大佬在 Lua GC 的源码剖析 系列文章中讲得很清楚,这里做一下简单的记录。 分步gc lua使用的是一种三色标记清除算法(tri-color incremental mark & sweep),大体步骤如下: 初始阶段,所…...

基于python爬虫对豆瓣影评分析系统的设计与实现
基于python爬虫对豆瓣影评分析系统的设计与实现 Design and Implementation of a Python-based Web Crawler for Analyzing Douban Movie Reviews 完整下载链接:基于python爬虫对豆瓣影评分析系统的设计与实现 文章目录 基于python爬虫对豆瓣影评分析系统的设计与实现摘要第一…...

开发者专属提示词库:提升AI协作效率的实战指南
1. 项目概述:一个为开发者量身定制的提示词宝库如果你是一名开发者,无论是前端、后端、运维还是算法工程师,我相信你都或多或少地接触过像 ChatGPT 这类大型语言模型。它们能写代码、解 Bug、解释概念,甚至帮你设计架构。但很多时…...

通达信数据解析终极指南:mootdx让金融数据获取变得如此简单
通达信数据解析终极指南:mootdx让金融数据获取变得如此简单 【免费下载链接】mootdx 通达信数据读取的一个简便使用封装 项目地址: https://gitcode.com/GitHub_Trending/mo/mootdx 在金融数据分析和量化交易的世界里,获取准确、完整的市场数据是…...

如何快速解密网易云NCM文件:终极免费转换工具指南
如何快速解密网易云NCM文件:终极免费转换工具指南 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否在网易云音乐下载了喜欢的歌曲,…...

通用框架操作系统:统一异构应用框架的运行时与治理平台
1. 项目概述:一个面向未来的通用框架操作系统最近在开源社区里,一个名为TELLEBO/universal-framework-os的项目引起了我的注意。乍一看这个标题,可能会觉得有点“大词”堆砌的感觉——“通用”、“框架”、“操作系统”,每一个词单…...

3分钟完成30分钟任务:词达人自动化助手终极指南
3分钟完成30分钟任务:词达人自动化助手终极指南 【免费下载链接】cdr 微信词达人,高正确率,高效简洁。支持班级任务及自选任务 项目地址: https://gitcode.com/gh_mirrors/cd/cdr 你是否厌倦了每周在词达人平台上花费数小时完成枯燥的…...

基于PIR传感器与LIFX智能灯泡的物联网运动感应照明系统实战
1. 项目概述与核心价值如果你对智能家居自动化感兴趣,并且想亲手打造一个既实用又有趣的照明项目,那么这个基于Adafruit FunHouse和LIFX智能灯泡的运动感应照明系统,绝对是一个绝佳的起点。它不仅仅是一个“开灯关灯”的简单触发器࿰…...

Python与ChatGPT构建智能办公自动化:从任务分解到智能体系统
1. 项目概述:用Python与ChatGPT联手,让办公自动化“开口说话”如果你每天还在重复着打开Excel、复制粘贴数据、手动写邮件、整理报告这些枯燥的活儿,那这个项目可能就是你的“数字员工”入职通知书。Sven-Bo/automate-office-tasks-using-cha…...

三维重建实时映射技术在智慧水利中的核心应用
三维重建实时映射技术在智慧水利中的核心应用在国家大力推进数字孪生水利建设、实现水安全精准保障的背景下,智慧水利已从传统监测、调度向全域感知、智能预判、协同处置、一屏统管升级。智慧水利的核心目标,是实现对江河湖库、灌区、泵站、堤坝、闸站等…...

m4s-converter终极指南:如何无损转换B站缓存视频并保留弹幕
m4s-converter终极指南:如何无损转换B站缓存视频并保留弹幕 【免费下载链接】m4s-converter 一个跨平台小工具,将bilibili缓存的m4s格式音视频文件合并成mp4 项目地址: https://gitcode.com/gh_mirrors/m4/m4s-converter 在数字内容日益丰富的今天…...

AI增强型写作工具Hermes-Writer:为开发者打造的智能写作助手
1. 项目概述:一个面向开发者的智能写作助手最近在GitHub上看到一个挺有意思的项目,叫dav-niu474/Hermes-Writer。乍一看标题,你可能会觉得这又是一个普通的Markdown编辑器或者写作工具。但如果你点进去,仔细研究一下它的README、代…...