QEMU启动x86-Linux内核
目录
- QEMU简介
- linux启动流程
- 我的环境
- 安装QEMU
- 软件包安装
- 源码安装
- 编译linux内核
- 编译busybox
- 制作initramfs
- 使用QEMU启动linux内核
- 简化命令
- 参考
QEMU简介
QEMU(quick emulator)是一个通用的、开源的硬件模拟器,可以模拟不同硬件架构(如x86、ARM、ARM64、MIPS、PowerPC等),是目前比较流行的跨平台仿真软件。
QEMU主要的仿真方式包括:全系统仿真和用户模式仿真。
全系统仿真,QEMU提供了整个机器的虚拟模型(包括CPU、内存和模拟设备等外设)来运行客户操作系统。该模式下,相当于系统级虚拟机。
用户模式仿真,QEMU 允许一个应用程序执行在不同架构的CPU上,该模式下,相当于进程级虚拟机。

本文介绍如何使用QEMU模拟器启动linux内核,使用的就是QEMU的全系统仿真模式。
linux启动流程
在开始之前,需要了解linux的开机启动流程,详细可自行查阅资料,如《鸟哥的Linux私房菜》的“Linux 的启动流程分析”。简要总结就是:BIOS,MBR,启动Bootloader,加载Kernel,挂载虚拟rootfs,挂载真实rootfs,初始化用户程序(即执行init进程)。
为什么会有虚拟rootfs?这涉及到initrd(全称boot loader initialized RAM disk,初始化的内存盘),RAM disk就是将内存的一部分分配为一个分区并作为磁盘来使用,initrd就是由 boot loader 初始化的内存盘。
initrd出现的背景。
早期,linux系统用于存储rootfs的介质一般只有硬盘或者软盘,内核集成了这些磁盘驱动程序,开机时内核可以直接挂载基于磁盘的rootfs。后来,嵌入式系统可能将rootfs存储到各种介质上,包括IDE、SCSI、SATA,Flash、u-disk等等。如果将所有介质的驱动都编译进内核,内核会越来越臃肿。索性,将所有存储介质的驱动都编译成内核模块并将其ko文件保存在rootfs中,可按需加载。那么问题来了,内核要挂载rootfs就要先加载对应存储介质驱动模块,内核要加载存储介质驱动模块,就要先挂载rootfs。先有鸡还是先有蛋?
为了解决这一矛盾,出现了基于ramdisk的initrd。initrd是一个被压缩过的小型根目录,这个目录中包含了启动阶段中必须的驱动模块,可执行文件和启动脚本。在 Bootloader 配置了 initrd 的情况下,内核启动被分成了两个阶段,第一阶段先挂载基于内存盘的虚拟roofs,把系统内存的一部分作为根文件系统挂载,执行 initrd 文件系统中的启动脚本,完成加载驱动模块等任务,第二阶段才挂载真实rootfs并执行初始化用户程序init 进程。
initrd是基于内存的块设备(即ramdisk),有个缺点就是大小固定,是过时的机制。Linux 2.6开始采用initramfs替换了initrd,initramfs(init ram filesystem)是基于内存的文件系统(即ramfs),其空间大小可动态变化,本文使用的就是 initramfs。
总结起来,就是在挂载基于磁盘的真正rootfs之前,会先挂载一个基于内存的虚拟rootfs(通过initrd或者initramfs 实现),虚拟rootfs只是起个过渡的作用,它完成一些内核不容易做到的事情,比如加载必要的驱动模块,挂载真正rootfs。
使用QEMU的全系统仿真模式启动linux内核时,BIOS、MBR和Bootloader都已经在QEMU内置好了,我们只要准备linux内核镜像和initramfs即可。本文重点演示QEMU启动内核,执行到基于内存的虚拟rootfs就结束了,并没有准备真实rootfs。
linux内核镜像可通过编译内核源码获得,initramfs可以使用 busybox 来制作。
我的环境
宿主机硬件平台:x86_64
宿主机操作系统:Ubuntu 20.04 (Linux 5.4.0-139-generic)
QEMU版本:qemu-4.2.1
实验内核:linux-5.19
busybox版本:busybox-1.35.0
安装QEMU
qemu安装方式有两种:Linux软件包安装、源码编译安装。
软件包安装
$ sudo apt-get install qemu-system-x86$ qemu-system-x86_64 --version
QEMU emulator version 4.2.1 (Debian 1:4.2-3ubuntu6.24)
Copyright (c) 2003-2019 Fabrice Bellard and the QEMU Project developers
源码安装
官方Documentation有详细介绍 Building QEMU for Linux可供参考。
安装依赖项,如果不知道自己环境装了没有,也可以不急着安装,可根据编译错误提示安装对应依赖项即可:
sudo apt-get install git libglib2.0-dev libfdt-dev libpixman-1-dev zlib1g-dev ninja-build
下载编译:
$ mkdir ~/kvm
$ cd ~/kvm/
$ wget https://download.qemu.org/qemu-7.2.0.tar.xz
$ tar -xf qemu-7.2.0.tar.xz
$ cd qemu-7.2.0
$ ./configure --target-list=x86_64-softmmu
$ make -j`nproc`
说明:
- 默认会编译所有平台(如arm、i386、x86_64等)的QEMU,这会很慢,加上 --target-list=x86_64-softmmu 选项只编译我环境所需的 x86_64 版本,以加快编译速度。
- make加上-j选项可加快编译速度,nproc命令用于获取可用的CPU核数,一般来说,-j最大并行任务数可设为CPU数量的2倍。
编译结果在源码目录的build子目录下:
$ ./build/qemu-system-x86_64 --version
QEMU emulator version 7.2.0
Copyright (c) 2003-2022 Fabrice Bellard and the QEMU Project developers
源码编译过程中我遇到的依赖问题有:
报错1:
$ ./configure
Using './build' as the directory for build outputERROR: Cannot find Ninja
解决1:
$ sudo apt-get install ninja-build
报错2:
$ ./configure
Using './build' as the directory for build outputERROR: glib-2.56 gthread-2.0 is required to compile QEMU
解决2:
$ sudo apt-get install libglib2.0-dev
报错3:
$ ./configure
Using './build' as the directory for build output../meson.build:553:2: ERROR: Dependency "pixman-1" not found, tried pkgconfigERROR: meson setup failed
解决 3:
$ sudo apt-get install libpixman-1-dev
编译linux内核
$ mkdir ~/kvm
$ cd ~/kvm/
$ wget https://git.kernel.org/pub/scm/linux/kernel/git/stable/linux.git/snapshot/linux-5.19.tar.gz
$ tar -xf linux-5.19.tar.gz
$ cd linux-5.19/
$ make defconfig
$ make menuconfig
$ make -j `nproc`
看到以下日志就表示编译成功:
Kernel: arch/x86/boot/bzImage is ready
其中bzImage文件就是编译后的内核镜像文件:
$ file arch/x86/boot/bzImage
arch/x86/boot/bzImage: Linux kernel x86 boot executable bzImage, version 5.19.0 (kaoya@kaoya-Inspiron-7472) #1 SMP PREEMPT_DYNAMIC Mon Feb 27 00:26:06 CST 2023, RO-rootFS, swap_dev 0xA, Normal VGA
说明:
3. 本次实验make menuconfig并未做任何修改,直接选择保存、退出。
4. make加上-j选项可加快编译速度,nproc命令用于获取可用的CPU核数,一般来说,-j最大并行任务数可设为CPU数量的2倍。
5. make过程可能会因为系统缺少依赖项而导致报错,根据提示安装对应依赖项即可。
我的环境在make过程中报错及其解决方法如下:
$ sudo apt install bison
报错1:
$ make defconfig/bin/sh: 1: flex: not found
解决1:
$ sudo apt install flex
报错2:
$ make defconfig/bin/sh: 1: bison: not found
解决2:
在这里插入代码片
编译busybox
$ mkdir ~/kvm
$ cd ~/kvm/
$ wget https://busybox.net/downloads/busybox-1.35.0.tar.bz2
$ tar -xf busybox-1.35.0.tar.bz2
$ cd busybox-1.35.0/
$ make menuconfig# 修改配置,选中如下项目,静态编译
# Settings –> Build Options –> [*] Build static binary(no share libs)# 反选如下项目,否则后续qemu执行会提示 /bin/sh:can't access tty;job control turned off
# Shells ---> [ ] Job control$ make -j `nproc`
$ make install
装完后会 默认安装到源码目录的 _install/ 目录下:
$ ls _install/
bin linuxrc sbin usr
最关键的就是_install/bin/busybox,其他都是链接文件。
$ file _install/bin/busybox
_install/bin/busybox: ELF 64-bit LSB executable, x86-64, version 1 (GNU/Linux), statically linked, BuildID[sha1]=8be05d97976fc5de35a9ebf2631529223523296f, for GNU/Linux 3.2.0, stripped
制作initramfs
使用busybox快速制作initramfs。
创建虚拟rootfs中的inti启动脚本,并赋予可执行权限:
$ cd ~/kvm/busybox-1.35.0/_install/
$ touch init
$ chmod +x init
脚本内容:
#!/bin/sh# 挂载一些必要的文件系统
mkdir /proc && mount -t proc none /proc
mkdir /sys && mount -t sysfs none /sys
mkdir /tmp && mount -t tmpfs none /tmpecho
echo "Hello Linux"# 显示开机消耗时间echo "This boot took $(cut -d' ' -f1 /proc/uptime) seconds"
echo# 停留在控制台
exec /bin/sh
制作initramfs文件,它是多个文件通过cpio打包和gzip压缩的文件,是一个cpio格式的内存文件系统。
$ find . -print0 | cpio --null -ov --format=newc | gzip -9 > ../initramfs.cpio.gz
使用QEMU启动linux内核
linux内核镜像和initramfs都准备好,就可以使用QEMU启动linux内核了。
以图形界面的方式启动QEMU:
$ cd ~/kvm/
$ qemu-system-x86_64 \-kernel ./linux-5.19/arch/x86/boot/bzImage \-initrd ./busybox-1.35.0/initramfs.cpio.gz \-append "init=/init"
以字符界面方式启动QEMU(不启动图形界面),同时日志输出到控制台:
$ qemu-system-x86_64 \-kernel ./linux-5.19/arch/x86/boot/bzImage \-initrd ./busybox-1.35.0/initramfs.cpio.gz \-nographic \-append "init=/init console=ttyS0"
QEMU参数说明(更多可参考:Standard options):
- -kernel:指定启动的内核镜像;
- -initrd:指定启动的内存文件系统;
- -append:传递给内核的启动参数;启动后可使用cat /proc/cmdline命令核对。
- -nographic:启动字符界面(不启动图形界面),输出重定向到宿主机命令行,与参数 console=ttyS0 组合使用;
图形界面操作使用工具栏菜单即可,字符界面操作使用快捷键如下所示(更多可参考:Keys in the character backend multiplexer):
C-a h print this help
C-a x exit emulator
C-a s save disk data back to file (if -snapshot)
C-a t toggle console timestamps
C-a b send break (magic sysrq)
C-a c switch between console and monitor
C-a C-a sends C-a
简化命令
为了简化命令输入,可以创建一个Makefile,内容如下:
$ vim ~/kvm/Makefileinitramfs:cd busybox-1.35.0/_install/ && find . -print0 | cpio --null -ov --format=newc | gzip -9 > ../initramfs.cpio.gzrun-win:qemu-system-x86_64 \-kernel ./linux-5.19/arch/x86/boot/bzImage \-initrd ./busybox-1.35.0/initramfs.cpio.gz \-append "init=/init"run-console:qemu-system-x86_64 \-kernel ./linux-5.19/arch/x86/boot/bzImage \-initrd ./busybox-1.35.0/initramfs.cpio.gz \-nographic \-append "init=/init console=ttyS0"
- make initramfs:制作initramfs;
- make run-win:以图形界面的方式启动QEMU;
- make run-console:以字符界面方式启动QEMU;
参考
QEMU官方文档:https://www.qemu.org/docs/master/
QEMU维基百科:https://wiki.qemu.org/Documentation
相关文章:
QEMU启动x86-Linux内核
目录QEMU简介linux启动流程我的环境安装QEMU软件包安装源码安装编译linux内核编译busybox制作initramfs使用QEMU启动linux内核简化命令参考QEMU简介 QEMU(quick emulator)是一个通用的、开源的硬件模拟器,可以模拟不同硬件架构(如…...

C/C++每日一练(20230311)
目录 1. 计算阶乘的和 ★ 2. 基本计算器 ★★★ 3. N皇后 II ★★★ 🌟 每日一练刷题专栏 C/C 每日一练 专栏 Python 每日一练 专栏 1. 计算阶乘的和 计算:1!-2!3!-4!5!-6!7!-8!9!-10!,并输出计算结果。 注意:不全是…...

哪个牌子的洗地机耐用?耐用的洗地机推荐
作为当下非常热销的洗地机,它不仅解放了双手,使用也非常的便捷。是生活品质提高的最好代表,但是面对市面上让人眼花缭乱的洗地机,挑选几个来回都决定不了到底入手哪个好!为了能帮助大家选购到合适的洗地机,…...

搭建一个中心化的定时服务
1. 背景 在物联网络,很多设备之间都在进行交互,其中云端在远程交流中起到了很重要的作用。比如,一台设备想进行调温,但是需要知道此时房间的温度,那就需要定时去查询传感器测出来的房间温度,如果温度过高&a…...
【CSS】快速入门笔记
视频链接:https://www.bilibili.com/video/BV1mS4y1Z7Ga/?spm_id_from333.999.0.0&vd_source1ad00d913eae8281cbadad6ae66fb06c 文章目录一、CSS语法1.结构2.样式类型1)内联样式 Inline Style2)内部样式 Internal Style3)外部…...
第161篇 笔记-去中心化的含义
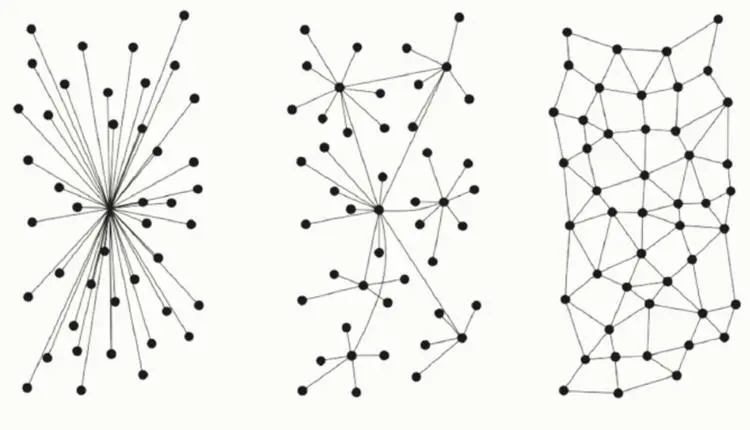
本文主要内容来自Vitalik Buterin的文章。“去中心化”这个词是在加密经济学领域用得最多的一个词,通常也作为辨别区块链的依据。然而,这个词也可能是被定义得最不恰当的一个词。数千小时的研究和价值数十亿美元哈希算力的投入都旨在实现去中心化&#x…...

「计算机组成原理」数据的表示和运算(二)
文章目录五、奇偶校验码六、算术逻辑单元ALU6.1 电路的基本原理6.2 加法器的设计6.2.1 一位全加器6.2.2 串行加法器6.2.3 串行进位的并行加法器6.2.4 并行进位的并行加法器七、补码加减运算器八、标志位的生成九、定点数的移位运算9.1 算数移位9.2 逻辑移位9.3 循环移位五、奇偶…...
建立自己的博客
环境安装: w10系统安装 第一步:安装git Git 官网: https://git-scm.com/ 第二步:安装Node.js Node.js官网:https://nodejs.org/zh-cn/ 使用cmd检测: node -v 第三步:安装Hexo Hexo官网:htt…...
Docker 安装mysql Mac 环境下
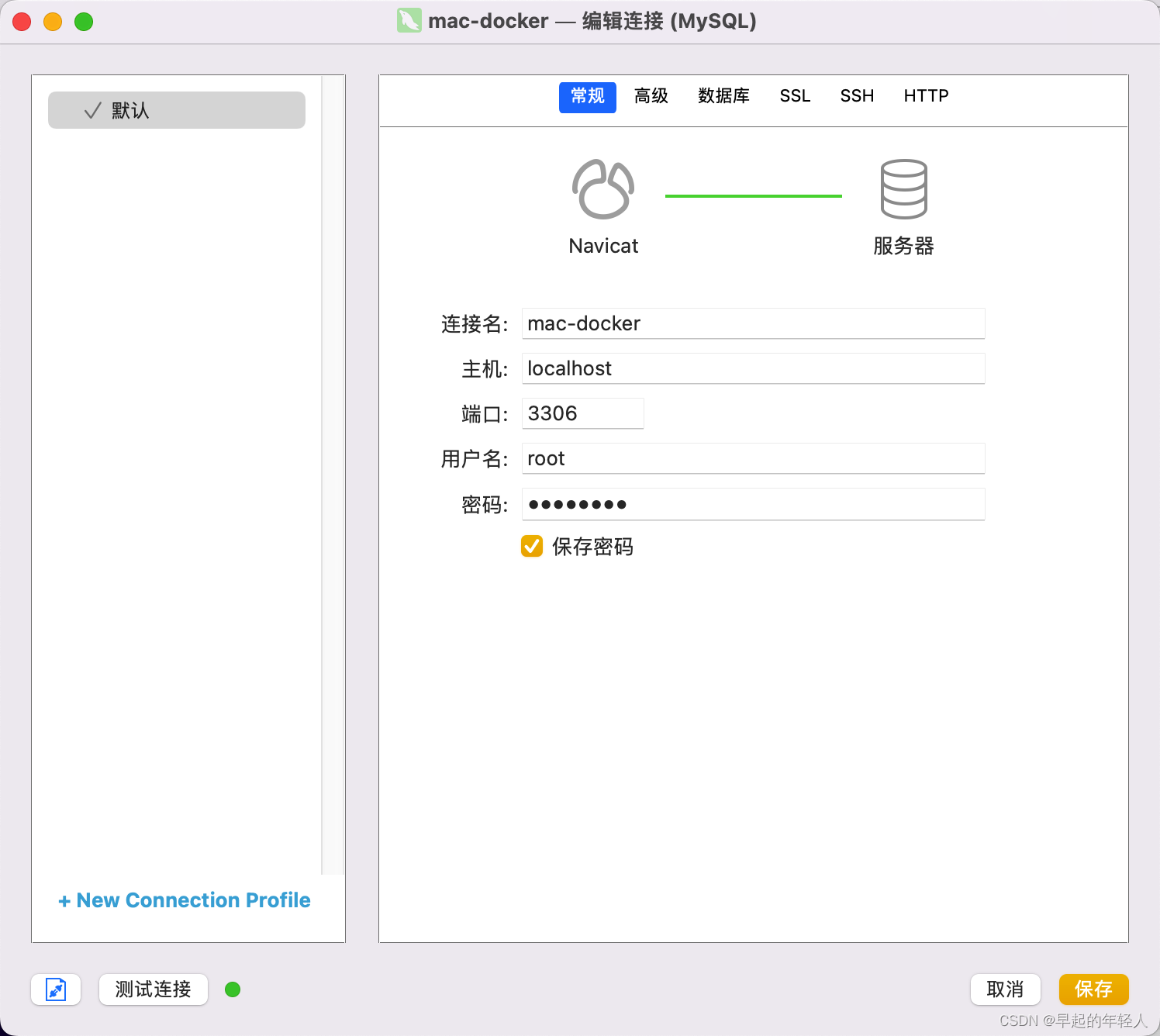
已安装桌面端 Docker (Mac安装Docker) 安装方式一 打开链接 https://www.docker.com/products/docker-desktop 选择平台下载 安装方式二 安装homebrew /usr/bin/ruby -e "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/m…...
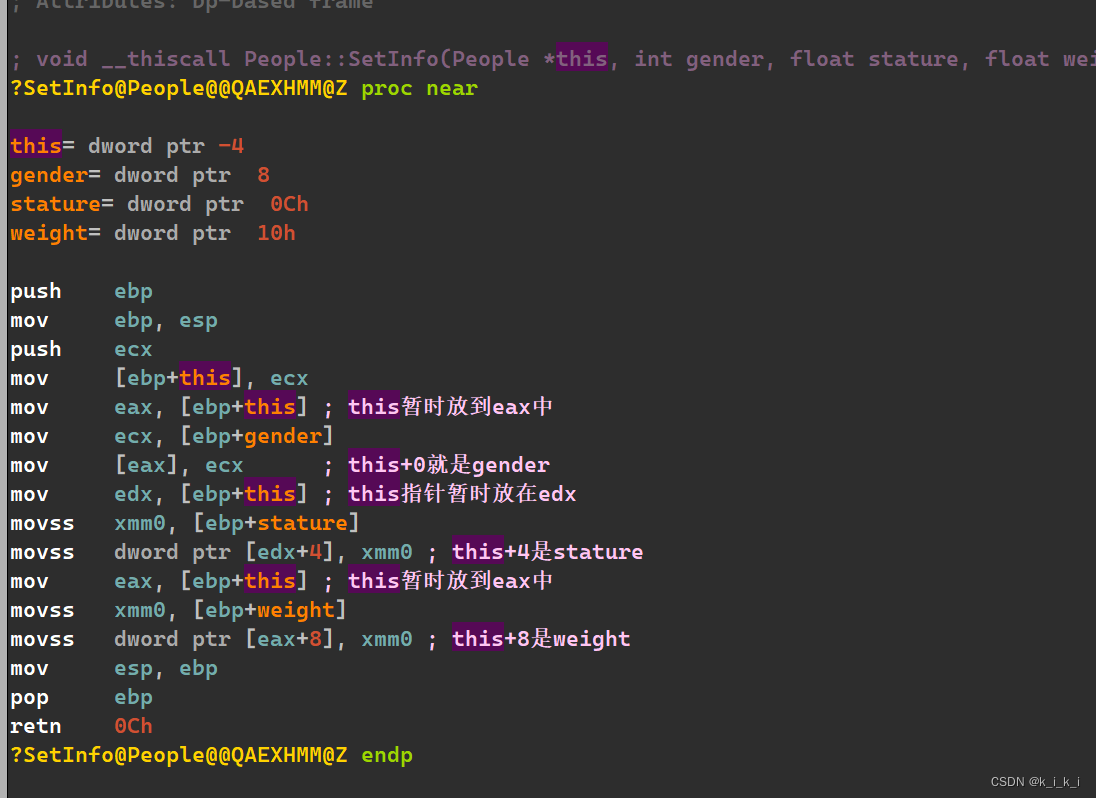
《C++代码分析》第三回:类成员函数覆盖父类函数的调用(分析this指针的变化)
一、前言 在C的学习中我们知道,子类是可以覆盖父类的方法,这里我们探讨一下子类方法调用父类方法时this指针时如何变化的。 二、示例代码 #include "windows.h" #include "windef.h" #include <iostream> #include <tch…...

Altium designer--软件简介及安装教程(Altium designer16)
一、软件介绍(完整安装包资源见文末链接,含破解license) Altium Designer 是一款简单易用、原生3D设计增强的一体化设计环境,结合了原理图、ECAD库、规则和限制条件、BoM、供应链管理、ECO流程和世界一流的PCB设计工具。通过原理…...
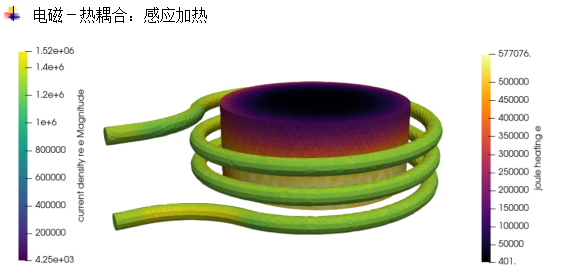
Windows系统下基于开源软件的多物理场仿真
Windows系统下基于开源软件的多物理场仿真实践技术应用随着计算机技术的发展,计算机仿真技术日益成为继实验和理论之后的第三种重要研究和设计手段。真实世界中遇到的问题往往是固体力学,流体力学,热,电磁等多种现象耦合而成&…...
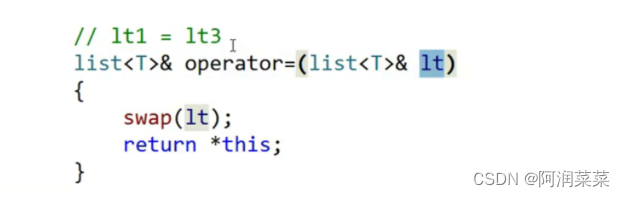
【STL】list剖析及模拟实现
✍作者:阿润菜菜 📖专栏:C 初识list 1. list基本概况 list是可以在常数范围内在任意位置进行插入和删除的序列式容器,并且该容器可以前后双向迭代。list的底层是双向链表结构,双向链表中每个元素存储在互不相关的独立…...

Go打包附件内容到执行文件
前言 如果我们的应用在启动的时候需要对数据库进行初始化(比如建表等), 可以通过读取.sql文件内容直接执行. 但是, 这样会带出一个问题: 在发送可执行文件的时候, 需要连带着附件文件, 并且相对路径还不能出错. 这样太麻烦了有时我们并不希望附件的内容被使用者看到 处于种种…...

Spring的配置属性
介绍 以前都是用XML来设置属性值,SpringBoot的自动配置可以简化Spring应用的开发。配置属性只是配置Spring应用上下文中bean的属性而已,可以通过多个源来配置,包括JVM系统属性、环境变量等。 Spring中有两种不同(但相关)的配置 bean装配&…...

132.《render-props, Hoc,自定义hooks 详解》
文章目录render-props 模式props 方式children 方式(推荐)Hoc(高阶组件)使用步骤示例props 丢失解决方案自定义 hook1.只执行一次2.防抖hook高阶组件与自定义hook有什么区别相同点不同点React 中代码逻辑复用有三种方式,render-props, Hoc&am…...

通过Session共享数据验证码进行用户登录
通过Session共享数据验证码进行用户登录 需求: 访问带有验证码的登录页面login.jsp。用户输入用户名,密码以及验证码。 ①。如果用户名和密码输入有误,跳转登陆页面,提示:用户名或密码错误。 ②。如果验证码输入有误…...

C++STL详解(六)——stack和queue
文章目录空间适配器stackstack的定义方式stack的使用stack的模拟实现queuequeue的定义方式queue的使用queue的模拟实现空间适配器 适配器是一种设计模式(设计模式是一套被反复使用的,多数人知晓的,经过分类编目的,代码设计经验的…...

javaEE 初阶 — CSS 的 基本语法 与 引入方式
文章目录1. 基本语法规范2. 三种引入方式1. 基本语法规范 CSS 的基本语法规范是由 选择器 和 若干个声明 组成的。 选择器选中一个元素之后,这些属性都是针对于这个元素展开的。 先来看一个没有 CSS 的效果。 <body><p>这是一个段落</p> </bo…...
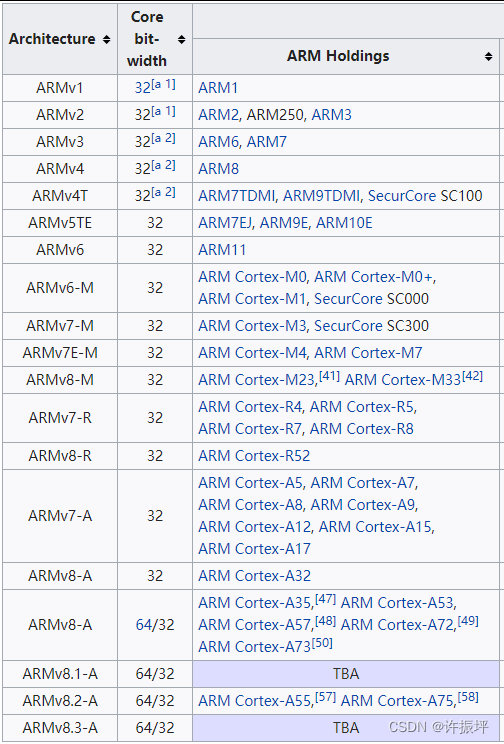
QEMU启动ARM32 Linux内核
目录前言前置知识ARM Versatile Express开发板简介ARM处理器家族简介安装qemu-system-arm安装交叉编译工具交叉编译ARM32 Linux内核交叉编译ARM32 Busybox使用busybox制作initramfs使用QEMU启动ARM32 Linux内核模拟vexpress-a9开发板模拟vexpress-a15开发板参考前言 本文介绍采…...

主动学习:让AI主动挑选最有价值的样本进行标注
1. 主动学习:不是AI在“等喂饭”,而是在“主动点菜”你有没有遇到过这种场景:手头有个图像分类项目,标注一张医学影像要花资深放射科医生15分钟,而你手上有5万张未标注CT切片——但预算只够标300张。或者在做客服对话意…...

构建个人代码知识库:codesift工具的设计理念与高效实践
1. 项目概述:从代码仓库到个人知识库的进化最近在整理自己过去几年写过的代码片段、工具脚本和项目配置时,发现了一个普遍存在的痛点:这些零散的“智慧结晶”散落在硬盘的各个角落、不同的Git仓库里,甚至有些只存在于模糊的记忆中…...

Slurm集群GPU资源管理实战:如何用`--gres=gpu`参数正确调度你的GTX1080Ti?
Slurm集群GPU资源管理实战:如何用--gresgpu参数正确调度你的GTX1080Ti? 在AI研究与数据科学领域,GPU资源的高效利用直接关系到模型训练与实验的成败。许多团队虽然配备了GTX1080Ti等高性能显卡,却常因Slurm集群调度不当导致资源闲…...

地下水位监测仪:实现深井水位远程自动观测
设备是什么地下水位监测仪是一种用于测量地下水、矿山井或地热井中水位高度的仪器。它采用投入式探头设计,基于静水压力原理工作:当传感器探头固定在水下某一点时,通过感知该点上方水柱产生的压力,结合安装高程,即可换…...

DRAM计算内存的电源传输网络优化策略
1. DRAM计算内存中的电源传输网络挑战与优化在数据密集型应用爆炸式增长的今天,传统冯诺依曼架构面临严峻的"内存墙"挑战。计算内存(Compute-in-Memory, CIM)技术通过在内存内部执行计算任务,从根本上改变了数据处理范式…...
)
避坑指南:在CentOS 7.5上成功安装Ansys 19.2的完整流程(附字体问题终极解决方案)
CentOS 7.5与Ansys 19.2黄金组合:工业仿真环境搭建实战手册 在工程仿真领域,Ansys作为行业标准工具链的核心组件,其Linux环境部署一直是技术人员的痛点。经过长达三个月的多版本交叉测试,我们意外发现CentOS 7.5与Ansys 19.2的组合…...

SITS 2026多目标优化落地指南:从梯度冲突到任务解耦,7步实现Pareto前沿精度提升23.6%
更多请点击: https://intelliparadigm.com 第一章:AI原生多任务学习:SITS 2026多目标优化实战技巧 在SITS 2026竞赛框架下,AI原生多任务学习(AI-Native Multi-Task Learning, AMTL)不再依赖传统单任务迁移…...

告别卡顿!用UltraISO给旧笔记本装Win10和Ubuntu双系统,从制作启动盘到分区配置完整流程
旧笔记本焕新指南:用UltraISO打造Win10与Ubuntu双系统全流程 每次打开那台陪伴多年的旧笔记本,风扇的轰鸣声和系统卡顿的转圈图标都在提醒你——是时候给它一次重生了。不同于直接更换硬件的高成本方案,通过双系统安装让老旧设备重获新生&…...

联想刃7000k BIOS解锁终极指南:安全释放隐藏性能的3种方法
联想刃7000k BIOS解锁终极指南:安全释放隐藏性能的3种方法 【免费下载链接】Lenovo-7000k-Unlock-BIOS Lenovo联想刃7000k2021-3060版解锁BIOS隐藏选项并提升为Admin权限 项目地址: https://gitcode.com/gh_mirrors/le/Lenovo-7000k-Unlock-BIOS 对于联想刃7…...
)
C语言打印三角形别再只会用*了!用字母、数字、符号玩出新花样(附完整代码)
C语言打印三角形:用字母、数字和符号玩转循环艺术 在C语言入门阶段,打印三角形几乎是每个初学者必经的练习。但你是否已经厌倦了千篇一律的星号(*)图案?今天,我们将打破常规,探索如何用字母、数字和各种符号来创造独特…...