西木科技Westwood-Robotics人型机器人Bruce配置和真机配置
西木科技Westwood-Robotics人型机器人Bruce配置和真机配置
- 本文内容
- 机器人介绍
- Bruce机器人Gazebo中仿真代码部署
- Bruce真机代码部署
本文内容
- 人形机器人Brcue相关介绍
- docker中安装Gazebo并使用
- Bruce机器人控制器更换环境配置
机器人介绍
公司:西木科技Westwood-Robotics官网
Westwood Robotics(西木科技)是一家创立于2018年的美国公司,总部位于洛杉矶。该公司的创始团队成员主要源自加州大学洛杉矶分校的Robotics & Mechanisms Laboratory(RoMeLa)实验室。RoMeLa实验室在机器人学术界具有极高的声望,它由著名机器人学教授Dennis Hong创立并领导。
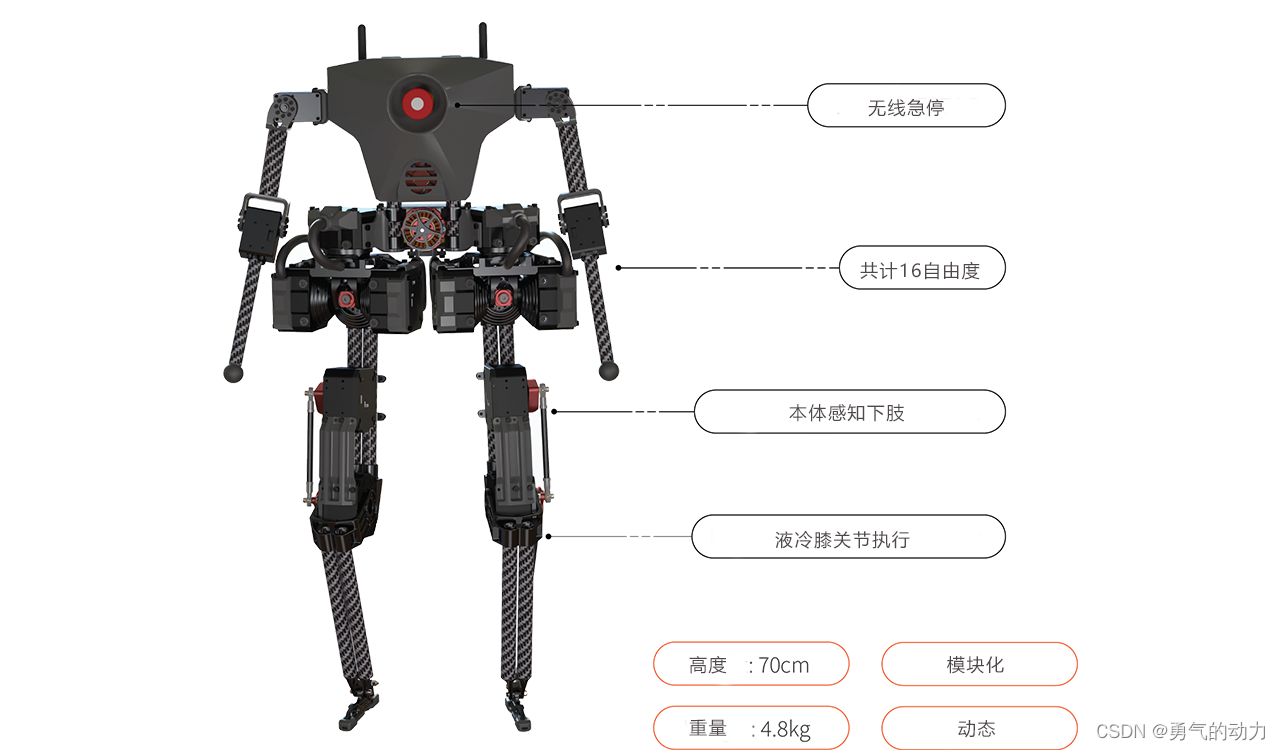
机器人:Bcuce机器人介绍
- 单腿5个自由度、单臂3个自由度、全身共16个自由度
- 仅重4.8kg、身高70cm、3000mAh电池
- 独立的无线急停装置
- 经由无线局域网通过SSH控制或蓝牙控制
- 腿部驱动器每个仅重250g、爆发力矩达8Nm
官方的github地址https://github.com/Westwood-Robotics
Bruce机器人Gazebo中仿真代码部署
docker中安装gazebo,并部署Bruce机器人仿真和代码
# docker中获取ubuntu系统,用jammy。
docker pull ubuntu:jammy-20240227
docker run -it \--env="DISPLAY=$DISPLAY" \--gpus all \--workdir="/home/zeven/bruce" \--volume="/home/zeven/bruce/BRUCE-OP:/home/zeven/bruce/BRUCE-OP" \--volume="/etc/apt/hosts" \--env="QT_X11_NO_MITSHM=1" \--volume="/tmp/.X11-unix:/tmp/.X11-unix:rw" \ubuntu:jammy-20240227rqt
export containerId=$(docker ps -l -q)
安装必要的包
apt clean# 2. 更新 apt 的缓存
apt-get update -y# 3. 安装 ca-certificates
apt-get install -y ca-certificatesBVC # 4. (可选) 安装任意一款 文本编辑器,以方便接下来修改配置文件
# Linux 常用文本编辑器:wim、nano、emacs
apt-get install <上述任意一个文本编辑器名>
# 如安装 vim
apt-get install vim
apt-get install curl
apt-get install pip
安装gazebo、docker显示相关和必要环境包
# 在宿主机执行
sudo apt-get install x11-xserver-utils
xhost +
#docker中执行
# 安装gazebo
echo "185.199.108.133 raw.githubusercontent.com" >> /etc/hosts
curl -sSL http://get.gazebosim.org | sh
# 测试安装是否正常
gezebo
# 安装环境依赖
pip install numpy pyserial termcolor matplotlib scipy osqp numba dynamixel-sdk posix_ipc pygame
然后依据
Bruce真机代码部署
电机驱动pyBear sdk安装
#获取代码
git clone git@github.com:Westwood-Robotics/PyBEAR.git
sudo cp 00-WestwoodRobotics.rules /etc/udev/rules.d
sudo udevadm control --reload
运行完后还是会出现权限不足问题,通过写udev规则解决。
下面是如何为这个设备编写udev规则的步骤:
打开终端: 在你的Linux系统中打开终端。
创建udev规则文件: 使用文本编辑器创建一个新的udev规则文件。例如,使用nano编辑器:
sudo nano /etc/udev/rules.d/99-usb2bear.rules
这里的文件名99-usb2bear.rules是你创建的udev规则文件,文件名前的数字 70 表示加载顺序,你可以根据需要选择不同的数字。
编写udev规则: 在打开的编辑器中,输入以下udev规则:
# bear
SUBSYSTEM=="tty", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6014", MODE="0666", GROUP="dialout"
# Dynamixel
SUBSYSTEM=="tty", ATTRS{idVendor}=="0403", ATTRS{idProduct}=="6001", MODE="0666", GROUP="dialout"
# imu
SUBSYSTEM=="tty", ATTRS{idVendor}=="2e8a", ATTRS{idProduct}=="000a", MODE="0666", GROUP="dialout"
这条规则表示,当udev检测到一个属于tty子系统,且具有特定供应商ID和产品ID的设备时,将该设备的文件模式设置为 0666(允许所有用户读写),并将该设备归属于 dialout 用户组。
保存并关闭文件: 如果你使用的是 nano,可以通过按 Ctrl+O 保存文件,然后按 Ctrl+X 退出编辑器。
重新加载udev规则: 保存规则文件后,需要重新加载udev规则,以使新规则生效:
sudo udevadm control --reload-rules
sudo udevadm trigger
将你的计算机权限修改为允许PyBEAR访问串行端口。
sudo chown -R your_username /usr/local
sudo usermod -a -G dialout your_username
CD到 PyBEAR/ 目录 安装相关包
pip3 install .
然后根据RM步骤进行
先编译包
cd BRUCE/BRUCE-OP
python3 -m Library.ROBOT_MODEL.BRUCE_DYNAMICS_AOT
python3 -m Library.ROBOT_MODEL.BRUCE_KINEMATICS_AOT
python3 -m Library.STATE_ESTIMATION.BRUCE_ORIENTATION_AOT
python3 -m Library.STATE_ESTIMATION.BRUCE_ESTIMATION_CF_AOT
python3 -m Library.STATE_ESTIMATION.BRUCE_ESTIMATION_KF_AOT
机器人控制中文件BRUCE_SERIAL_PORT 是相关通讯接口号需要更改Settings/BRUCE_macros.py (line 272-283)代码匹配BRUCE_SERIAL_PORT位置
相关文章:
西木科技Westwood-Robotics人型机器人Bruce配置和真机配置
西木科技Westwood-Robotics人型机器人Bruce配置和真机配置 本文内容机器人介绍Bruce机器人Gazebo中仿真代码部署Bruce真机代码部署 本文内容 人形机器人Brcue相关介绍docker中安装Gazebo并使用Bruce机器人控制器更换环境配置 机器人介绍 公司:西木科技Westwood-R…...
【招聘贴】JAVA后端·唯品会·BASE新加坡
作者|老夏(题图:公司业务介绍页) “ 请注意,这两个岗是BASE新加坡的,欢迎推荐给身边需要的朋友(特别是在新加坡的)。” VIP海外业务-产品技术团队,这两个岗位属于后端工程组的岗&…...

CVPR2024|vivo提出使用对抗微调获得泛化性更强的SAM,分割性能直接登顶 SOTA!
在计算机视觉不断发展的领域中,基础模型已成为一种关键工具,显示出对多种任务的出色适应性。其中,由 Meta AI 开发的 Segment Anything Model(SAM)在图像分割任务中表现杰出。然而,和其他类似模型一样&…...
程序员必备的ChatGPT技巧:从代码调试到项目管理
近年来,随着人工智能技术的迅猛发展,ChatGPT作为一种强大的对话式AI工具,已经广泛应用于各个领域。而对于程序员来说,ChatGPT不仅可以帮助他们解决编程中的各种问题,还能在项目管理中发挥重要作用。本篇博客将详细介绍…...

JAVA开发的一套医院绩效考核系统源码:KPI关键绩效指标的清晰归纳
KPI是关键绩效指标(Key Performance Indicators)的缩写,它是一种用于衡量员工或组织绩效的量化指标。这些指标通常与组织的目标和战略相关,并帮助管理层评估员工和组织的实际表现。KPI还可以为员工提供清晰的方向,使他…...

面向对象编程——python
目录 一、面向对象编程 1.1 类和对象 1.2 继承 1.3 封装 1.4 多态 1.5 Python中的面向对象编程 二、类、对象和变量 2.1 类(Class) 2.2.1 类的属性(Class Attributes) 2.2.2 类的方法(Class Methods…...

【LeetCode】每日一题:合并K个升序链表
给你一个链表数组,每个链表都已经按升序排列。 请你将所有链表合并到一个升序链表中,返回合并后的链表。 解题思路 分治加两个链表合并,或者用根堆,根堆的初始化方法很值得背诵,还涉及lambda的用法 AC代码 # Defini…...
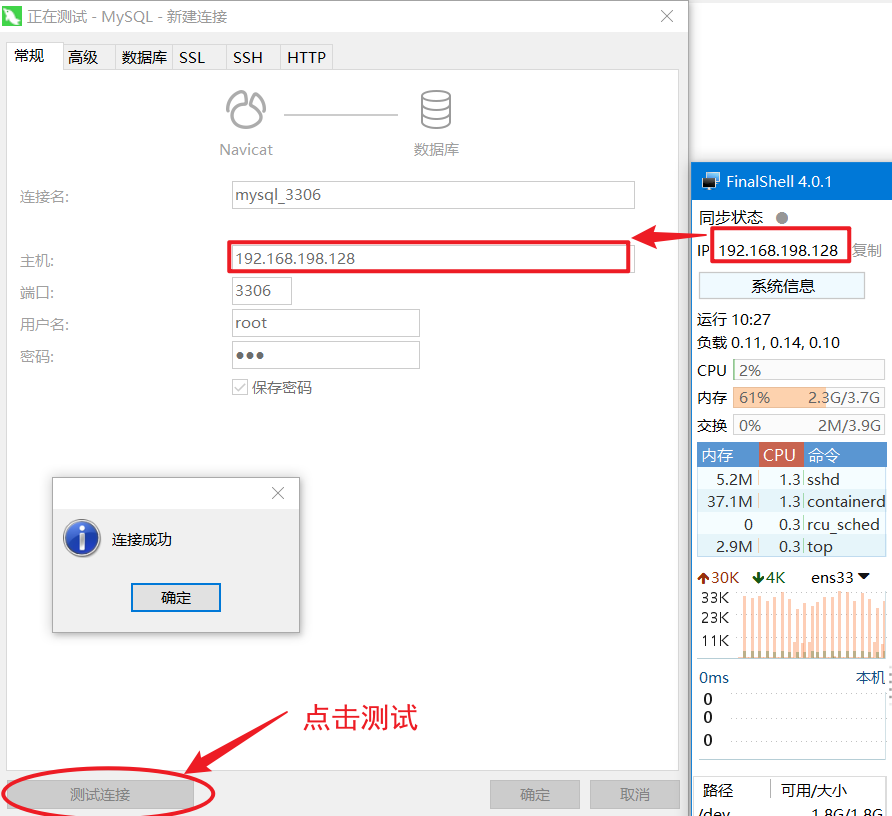
从零开始学docker(四)-安装mysql及主从配置(一)
mysql MySQL是一个关系型数据库管理系统,由瑞典MySQL AB 公司开发,属于 Oracle 旗下产品。MySQL 是最流行的关系型数据库管理系统之一,在 WEB 应用方面,MySQL是最好的 RDBMS (Relational Database Management System,关…...
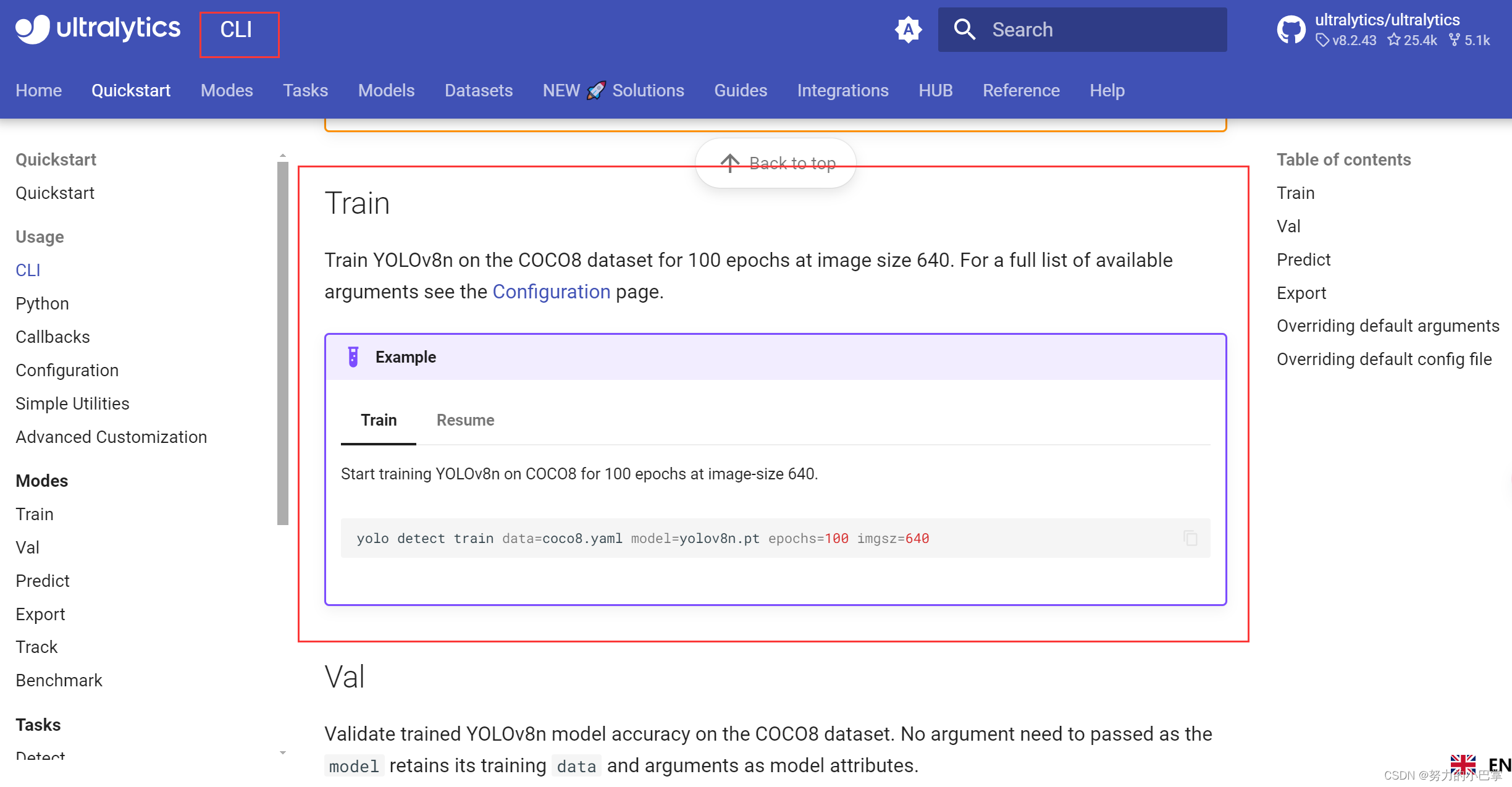
【目标检测】Yolov8 完整教程 | 检测 | 计算机视觉
学习资源:https://www.youtube.com/watch?vZ-65nqxUdl4 努力的小巴掌 记录计算机视觉学习道路上的所思所得。 1、准备图片images 收集数据网站:OPEN IMAGES 2、准备标签labels 网站:CVAT 有点是:支持直接导出yolo格式的标…...
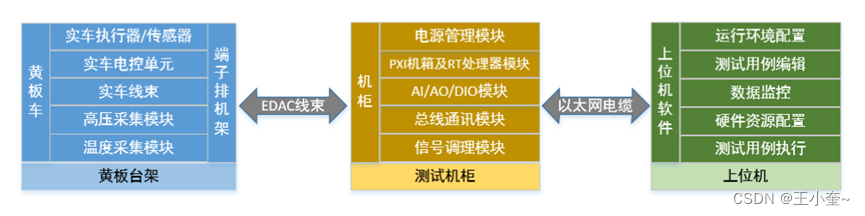
新能源汽车 LabCar 测试系统方案(-)
什么是LabCar测试 LabCar测试目标是进行整车黄板台架功能测试,用于整车开发和测试阶段,满足设计人员和测试人员的试验需求,以验证整车性能,减少开发工作量。系统主要用于测试静态及动态工况下的纯电动汽车的各项功能实现情况。 …...
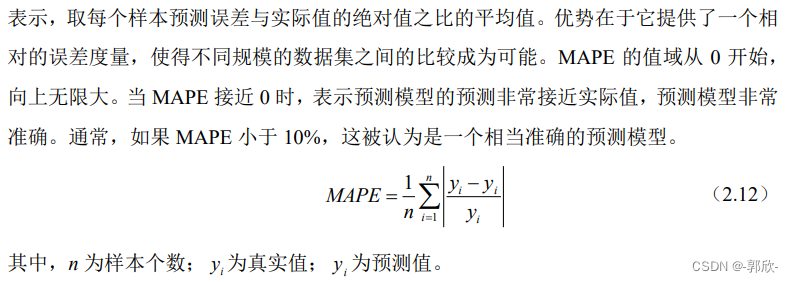
机器学习辅助的乙醇浓度检测(毕设节选)
目录 1.为什么要机器学习 2. 神经网络一般组成 3.BP神经网络工作过程 4.评价指标 5.实操代码 1.为什么要用机器学习 人工分析大量的谐振模式,建立各种WGM的响应与未知目标之间的关系,是一个很大的挑战。机器学习(ML)能够自行识别全谱的全部特征。作为…...
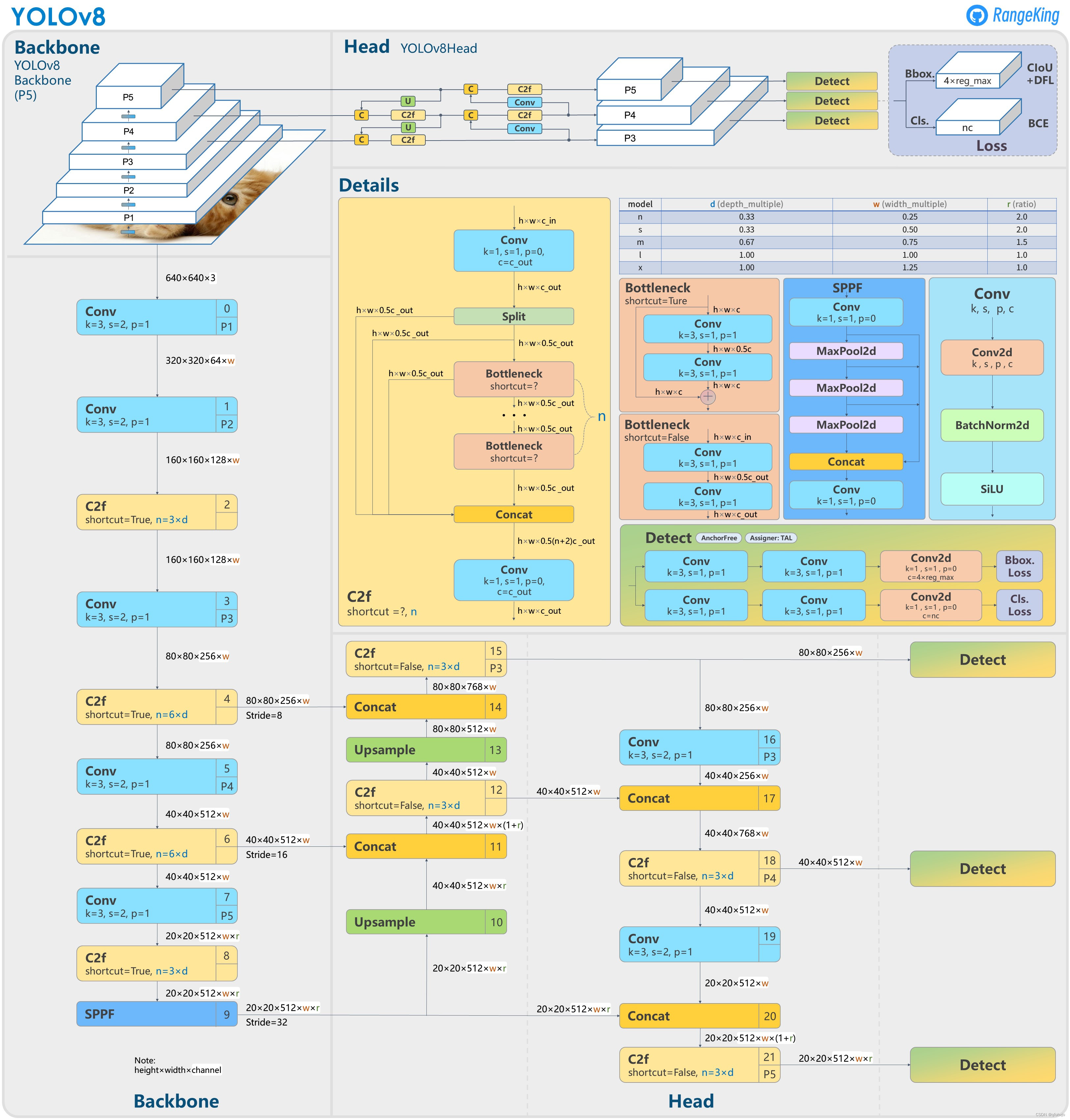
YOLO系列改进
yolo核心思想:把目标检测转变成一个回归问题。将整个图像作为网络的输入,仅仅经过一个神经网络,得到边界框的位置及其所属的类别。 YOLOv1 CVPR2016 输出7730的张量表示2个框的5个参数和20个种类。leaky ReLU,leaky并不会让负数…...
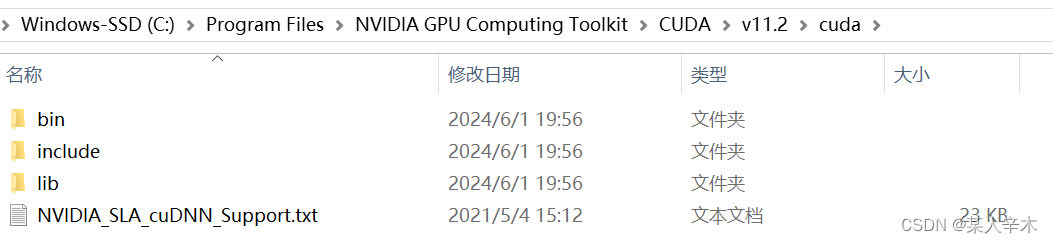
cuda与cudnn下载(tensorflow-gpu)
目录 前言 正文 前言 !!!tensorflow-gpu的版本要与cuda与cudnn想对应。这点十分重要!推荐下载较新的。即tensorflow-gpu2.60及以上,cuda11.x及以上,cudnn8.x及以上。 所以,下载之前先检查好…...

git 多分支实现上传文件但避免冲突检测
文章目录 背景实现步骤 背景 对于某些通过命令生成的配置文件(如 TypeScript 类型文件等) 实现步骤 1...
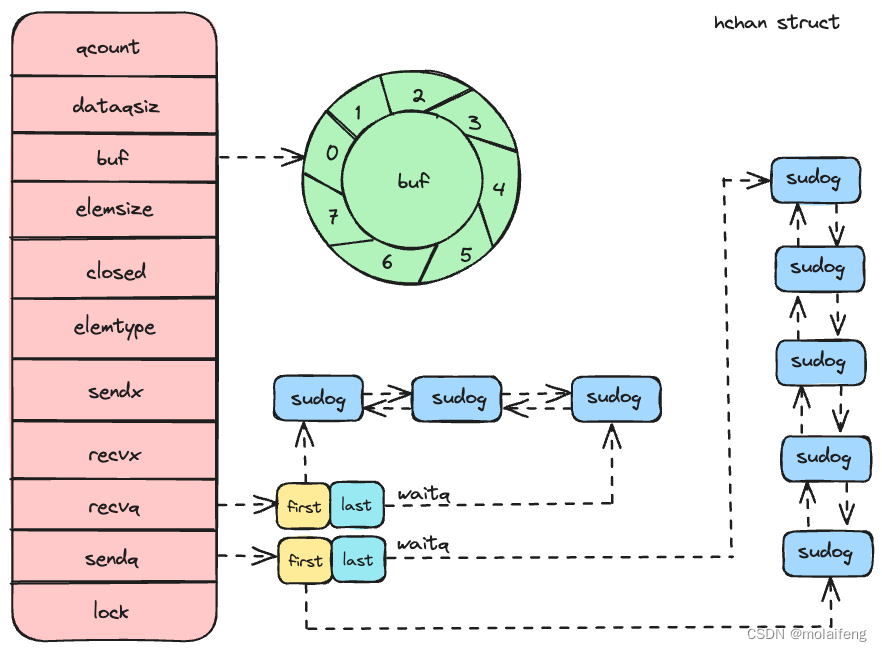
聊聊 golang 中 channel
1、引言 Do not communicate by sharing memory; instead, share memory by communicating Golang 的并发哲学是“不要通过共享内存进行通信,而要通过通信来共享内存”,提倡通过 channel 进行 goroutine 之间的数据传递和同步,而不是通过共享…...
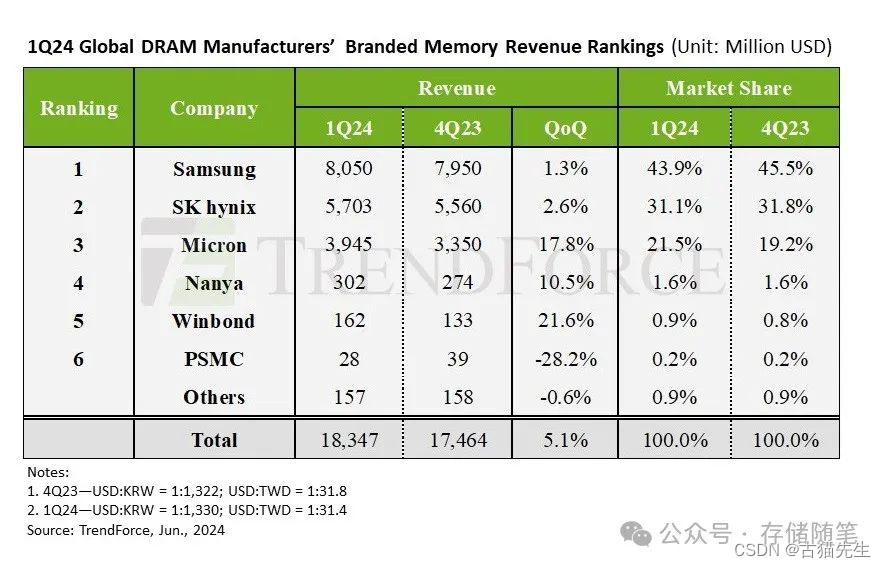
SK Hynix 3D DRAM良率突破56.1%,开启存储新时代
根据韩国财经媒体Business Korea独家报道:在刚刚结束的VLSI 2024国际研讨会上,韩国半导体巨头SK Hynix公布了一项振奋人心的进展:其五层堆叠3D DRAM的制造良率已达到56.1%。此成果标志着3D DRAM技术在商业化道路上迈出了坚实的一步࿰…...

如何封装自动化测试框架?
封装自动化测试框架,测试人员不用关注框架的底层实现,根据指定的规则进行测试用例的创建、执行即可,这样就降低了自动化测试门槛,能解放出更多的人力去做更深入的测试工作。 本篇文章就来介绍下,如何封装自动化测试框…...
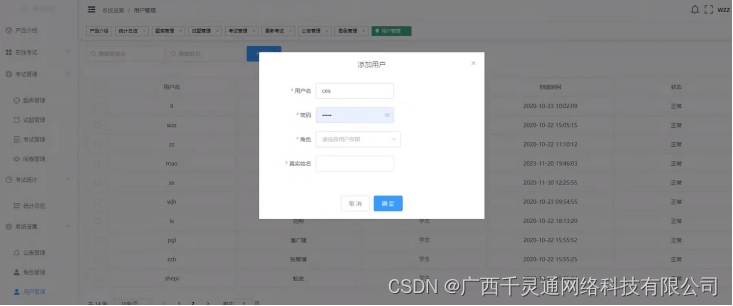
基于Java的在线编程考试系统【附源码】
毕业设计(论文) 题目:基于 二级学院: 现代技术学院 专业(方向): 计算机应用技术 班 级: 计科B2015 学 生: 指导教师: 2024年1月 29 日 本科毕业论文(设计)学术诚信声明 本人郑重…...

Beautiful Soup的使用
1、Beautiful Soup简介 Beautiful Soup是一个Python的一个HTML或XML的解析库,我们用它可以方便地从网页中提取数据。 Beautiful Soup 提供一些简单的、Python 式的函数来处理导航、搜索、修改分析树等功能。它是一个工具箱,通过解析文档为用户提供需要抓…...

633. 平方数之和(中等)
633. 平方数之和 1. 题目描述2.详细题解3.代码实现3.1 Python3.2 Java内存溢出溢出代码正确代码与截图 1. 题目描述 题目中转:633. 平方数之和 2.详细题解 本题是167. 两数之和 II - 输入有序数组(中等)题目的变型,由两数之和变…...

YetiClaw Studio:本地部署AI游戏开发工作室实战指南
1. 项目概述:YetiClaw Studio,一个运行在本地硬件上的AI游戏开发工作室如果你是一个独立游戏开发者,或者是一个小型工作室的成员,那么你一定对游戏开发中那些繁琐、重复但又至关重要的环节深有体会:从最初那个模糊的创…...

Axure RP中文语言包终极指南:从英文界面到完美汉化的三步解决方案
Axure RP中文语言包终极指南:从英文界面到完美汉化的三步解决方案 【免费下载链接】axure-cn Chinese language file for Axure RP. Axure RP 简体中文语言包。支持 Axure 11、10、9。不定期更新。 项目地址: https://gitcode.com/gh_mirrors/ax/axure-cn Ax…...
)
从源码到桌面:手把手教你用Python搭建SimpleFOCStudio开发环境(Windows/Mac)
从源码到桌面:手把手教你用Python搭建SimpleFOCStudio开发环境(Windows/Mac) 在开源硬件和电机控制领域,SimpleFOCStudio已成为开发者调试无刷电机的利器。不同于直接下载可执行文件的"快餐式"使用,从源码构…...

社会工程学驱动的域名劫持攻击机理与防御体系研究 —— 以 CoW DAO 事件为例
摘要 2026 年 4 月 14 日,去中心化交易服务平台 CoW DAO 的官方域名 cow.fi 遭遇社会工程学攻击,攻击者通过入侵.fi 域名注册商流程、伪造身份材料并劫持 DNS 解析,将用户流量导向伪造钓鱼页面,诱导钱包签名导致资产损失约 120 万…...

禅论结构量化:通达信可视化分析插件的算法实现与实践应用
禅论结构量化:通达信可视化分析插件的算法实现与实践应用 【免费下载链接】Indicator 通达信缠论可视化分析插件 项目地址: https://gitcode.com/gh_mirrors/ind/Indicator 禅论量化分析插件通过算法自动识别K线图中的线段结构和中枢区域,为交易者…...

面试之关系型数据库
数据库设计三范式第一范式。任何一张表必须有主键,每一个字段具有原子性不可再分。第二范式。所有非主键字段完全依赖主键字段,不存在部分依赖(复合主键可能存在此情况)。第三范式。所有非主键字段直接依赖于主键字段,…...

暗黑破坏神2角色编辑器:5分钟打造完美角色的终极指南
暗黑破坏神2角色编辑器:5分钟打造完美角色的终极指南 【免费下载链接】diablo_edit Diablo II Character editor. 项目地址: https://gitcode.com/gh_mirrors/di/diablo_edit 还在为暗黑破坏神2中漫长的练级过程而苦恼?想要快速测试不同职业的bui…...

避坑指南:在CentOS 7虚拟机里用Cadence Virtuoso做仿真,这两个模型库配置细节千万别忽略
避坑指南:在CentOS 7虚拟机里用Cadence Virtuoso做仿真,这两个模型库配置细节千万别忽略 在IC设计领域,Cadence Virtuoso作为行业标准工具链的核心组件,其稳定性和功能完整性直接影响设计效率。然而,当这一专业工具运…...

WechatDecrypt:如何安全解密微信聊天记录的完整技术指南
WechatDecrypt:如何安全解密微信聊天记录的完整技术指南 【免费下载链接】WechatDecrypt 微信消息解密工具 项目地址: https://gitcode.com/gh_mirrors/we/WechatDecrypt 在数字时代,我们的重要对话和回忆往往存储在加密的聊天记录中。当需要迁移…...

一篇看懂 SimGen:它为什么能“同时生成手术图像和分割掩码”?
在医学影像领域,“生成图像”已经不算新鲜事;但在手术场景里,真正有价值的并不只是生成一张“看起来像真的”图,而是同时生成一张能够精确标出器械、组织和解剖区域的分割掩码。因为对手术 AI 来说,最贵的从来不是图片…...