IMU 积分的误差状态空间方程推导
文章目录
- 0. 前言
- 1. 离散时间的IMU运动学方程
- 2. 状态变量定义
- 3. 补充公式
- 4. IMU误差状态空间方程推导
0. 前言
本文推导的是 IMU 积分的误差状态空间方程,预积分的推导要比积分复杂,但是推到方法和本文是一样的,因此这里只给出积分的推导方式。
另外,本文的推导方式参考了 R2Live Supplementary Material 中给出的推导,这种方法是基于李群李代数使用 全增量 的方法计算误差状态空间方程,非常好理解。
1. 离散时间的IMU运动学方程
{pi+1=pi+viΔt+12[Ri(ami−bai−nai)−g]Δt2vi+1=vi+[Ri(ami−bai−nai)−g]ΔtRi+1=Riexp[(ωmi−bωi−nωi)Δt]bωi+1=bωi+nbωiΔtbai+1=bai+nbaiΔt\left\{\begin{array}{l} \mathbf{p}_{i+1}=\mathbf{p}_i+\mathbf{v}_i \Delta t+\frac{1}{2}\left[\mathbf{R}_i\left(\mathbf{a}_{m i}-\mathbf{b}_{a_i}-\mathbf{n}_{a i}\right)-\mathbf{g}\right] \Delta t^2 \\ \mathbf{v}_{i+1}=\mathbf{v}_i+\left[\mathbf{R}_i\left(\mathbf{a}_{m i}-\mathbf{b}_{a i}-\mathbf{n}_{a i}\right)-\mathbf{g}\right] \Delta t \\ \mathbf{R}_{i+1}=\mathbf{R}_i \exp \left[\left(\mathbf{\omega}_{mi}-\mathbf{b}_{\omega i}-\mathbf{n}_{\omega i}\right) \Delta t\right] \\ \mathbf{b}_{\omega i+1}=\mathbf{b}_{\omega i}+\mathbf{n}_{b_\omega i} \Delta t \\ \mathbf{b}_{a_i+1}=\mathbf{b}_{a i}+\mathbf{n}_{b_a i} \Delta t \end{array}\right. ⎩⎨⎧pi+1=pi+viΔt+21[Ri(ami−bai−nai)−g]Δt2vi+1=vi+[Ri(ami−bai−nai)−g]ΔtRi+1=Riexp[(ωmi−bωi−nωi)Δt]bωi+1=bωi+nbωiΔtbai+1=bai+nbaiΔt
- 式中忽略了参考坐标系,一般可以选择 worldworldworld 系 W{W}W,此时 g=[0,0,9.8]Tg=[0, 0, 9.8]^Tg=[0,0,9.8]T;
- nai,nωi\mathbf{n}_{a i},\mathbf{n}_{\omega i}nai,nωi 为IMU读数的高斯白噪声;
- nbai,nbωi\mathbf{n}_{b_a i},\mathbf{n}_{b_\omega i}nbai,nbωi 为IMU零偏的随机游走的高斯分布。
2. 状态变量定义
- 名义状态 x^\hat{\mathbf{x}}x^:估计出来的状态,真正能算出来的状态;
- 真实状态 x\mathbf{x}x:无法计算出来的状态,永远不知道的状态,只能用公式表示出来;
- 误差状态 δx\mathbf{\delta x}δx:真实状态 x\mathbf{x}x 与 名义状态 x^\hat{\mathbf{x}}x^ 的差值,关系式为:x=x^+δx\mathbf{x} = \hat{\mathbf{x}} + \mathbf{\delta x}x=x^+δx,即 真实状态 = 名义状态 + 误差状态。
比如:
-
角速度 ω\mathbf{\omega}ω 的名义状态和真实状态:
{名义值:ωi^=ωmi−b^ωi真实值:ωi=ωi^−δb^ωi−nωi=ωmi−b^ωi−δb^ωi−nωi\left\{\begin{array}{l} 名义值:\hat{\mathbf{\omega}_i} = \mathbf{\omega}_{m i} - \hat{\mathbf{b}}_{\omega i} \\ 真实值:\mathbf{\omega}_i = \hat{\mathbf{\omega}_i} - \delta\hat{\mathbf{b}}_{\omega i} - \mathbf{n}_{\omega i} = \mathbf{\omega}_{m i} - \hat{\mathbf{b}}_{\omega i} - \delta\hat{\mathbf{b}}_{\omega i} - \mathbf{n}_{\omega i} \end{array}\right. {名义值:ωi^=ωmi−b^ωi真实值:ωi=ωi^−δb^ωi−nωi=ωmi−b^ωi−δb^ωi−nωi -
加速度 a\mathbf{a}a 的名义状态和真实状态:
{名义值:ai^=ami−b^ai真实值:ai=ai^−δb^ai−nai=ami−b^ai−δb^ai−nai\left\{\begin{array}{l} 名义值:\hat{\mathbf{a}_i} = \mathbf{a}_{m i} - \hat{\mathbf{b}}_{a i} \\ 真实值:\mathbf{a}_i = \hat{\mathbf{a}_i} - \delta\hat{\mathbf{b}}_{a i} - \mathbf{n}_{a i} = \mathbf{a}_{m i} - \hat{\mathbf{b}}_{a i} - \delta\hat{\mathbf{b}}_{a i} - \mathbf{n}_{a i} \end{array}\right. {名义值:ai^=ami−b^ai真实值:ai=ai^−δb^ai−nai=ami−b^ai−δb^ai−nai
3. 补充公式
-
李代数上的增量和李群上的扰动之间的关系:
exp(ϕ+Δϕ)=exp(JlΔϕ)⋅exp(ϕ)=exp(ϕ)⋅exp(JrΔϕ)\begin{align} \exp (\phi+\Delta \phi) =\exp (J_l \Delta \phi) \cdot \exp (\phi) =\exp (\phi) \cdot \exp (J_r \Delta \phi)\end{align} exp(ϕ+Δϕ)=exp(JlΔϕ)⋅exp(ϕ)=exp(ϕ)⋅exp(JrΔϕ) -
SO(3)SO(3)SO(3)的伴随性质:
R⊤exp(ϕ)R=exp(R⊤ϕ)\begin{align}R^{\top} \exp (\phi) R=\exp \left(R^{\top} \phi\right)\end{align} R⊤exp(ϕ)R=exp(R⊤ϕ) -
BCH近似公式:
log[exp(ϕ1)exp(ϕ2)]={Jl(ϕ2)−1ϕ1+ϕ2,ϕ1≈0Jr(ϕ1)−1ϕ2+ϕ1,ϕ2≈0\begin{align} \log \left[\exp \left(\phi_1\right) \exp \left(\phi_2\right)\right]=\left\{\begin{array}{l}\operatorname{J_l}\left(\phi_2\right)^{-1} \phi_1+\phi_2, \quad \phi_1 \approx 0 \\ \operatorname{J_r}\left(\phi_1\right)^{-1} \phi_2+\phi_1, \quad \phi_2 \approx 0 \end{array}\right.\end{align} log[exp(ϕ1)exp(ϕ2)]={Jl(ϕ2)−1ϕ1+ϕ2,ϕ1≈0Jr(ϕ1)−1ϕ2+ϕ1,ϕ2≈0
4. IMU误差状态空间方程推导
4.1. 旋转误差 δr^i+1\delta\hat{\mathbf{r}}_{i+1}δr^i+1
定义:δr^i+1=log[R^i+1⊤Ritt]名义值:R^i+1=R^iexp(w^iΔt)真实值:Ri+1=R^iexp(δr^i)⋅exp(ωiΔt)\begin{aligned} \text { 定义:} \delta \hat{r}_{i+1} & =\log \left[\hat{R}_{i+1}^{\top} R_{i t t}\right] \\ \text {名义值:} \hat{R}_{i+1} & =\hat{R}_i \exp \left(\hat{w}_i \Delta t\right) \\ \text {真实值:} R_{i+1} & =\hat{R}_i \exp \left(\delta \hat{r}_i\right) \cdot \exp \left(\omega_i \Delta t\right) \end{aligned} 定义:δr^i+1名义值:R^i+1真实值:Ri+1=log[R^i+1⊤Ritt]=R^iexp(w^iΔt)=R^iexp(δr^i)⋅exp(ωiΔt)
则旋转误差如下:

4.2. 速度误差 δv^i+1\delta\hat{\mathbf{v}}_{i+1}δv^i+1
名义值:v^i+1=v^i+(R^ia^i−g)Δt真实值:vi+1=(v^i+δv^i)+[R^iexp(δr^i)(a^i−δb^ai−nai)−g]Δt\begin{aligned} 名义值: \hat{v}_{i+1}&=\hat{v}_i+\left(\hat{R}_i \hat{a}_i-g\right) \Delta t \\ 真实值:v_{i+1} &= \left(\hat{v}_i+\delta \hat{v}_i \right) + \left[\hat{R}_i \exp \left(\delta \hat{r}_i\right)\left(\hat{a}_i-\delta \hat{b}_{a i}-n_{a i}\right)-g\right] \Delta t \end{aligned} 名义值:v^i+1真实值:vi+1=v^i+(R^ia^i−g)Δt=(v^i+δv^i)+[R^iexp(δr^i)(a^i−δb^ai−nai)−g]Δt

4.3. 平移误差 δpi+1\delta \mathbf{p}_{i+1}δpi+1
名义值: p^i+1=pi^+v^iΔt+12(Ri^ai^−g)Δt2真实值: pi+1=(p^i+δp^i)+(v^i+δv^i)Δt+12[R^i⋅exp(δr^i)(a^i−δb^ai−nai)−g]⋅Δt2\begin{aligned} & \text { 名义值: } \hat{p}_{i+1}=\hat{p_i}+\hat{v}_i \Delta t+\frac{1}{2}\left(\hat{R_i} \hat{a_i}-g\right) \Delta t^2 \\ & \text { 真实值: } p_{i+1}=\left(\hat{p}_i+\delta \hat{p}_i\right)+\left(\hat{v}_i+\delta \hat{v}_i\right) \Delta t+\frac{1}{2}\left[\hat{R}_i \cdot \exp \left(\delta \hat{r}_i\right)\left(\hat{a}_i-\delta \hat{b}_{ai}-n_{ai}\right) -g\right] \cdot \Delta t^2 \\ & \end{aligned} 名义值: p^i+1=pi^+v^iΔt+21(Ri^ai^−g)Δt2 真实值: pi+1=(p^i+δp^i)+(v^i+δv^i)Δt+21[R^i⋅exp(δr^i)(a^i−δb^ai−nai)−g]⋅Δt2

4.4. 角速度零偏误差 δb^wi+1\delta \hat{b}_{w_{i+1}}δb^wi+1
名义值:b^wi+1=b^wi真实值:bwi+1=b^wi+δbwi+Δt⋅nbwi误差:δbwi+1=δbwi+Δt⋅nbwi\begin{aligned} \text { 名义值:} \hat{b}_{w_{ i+1}} &=\hat{b}_{w i} \\ \text { 真实值:} b_{w_{i+1} } &=\hat{b}_{w_i}+\delta b_{w i}+\Delta t \cdot n_{b_{wi}} \\ \text { 误差:} \delta b_{w_{i+1} } &=\delta b_{w i}+\Delta t \cdot n_{b_{wi}} \\ \end{aligned} 名义值:b^wi+1 真实值:bwi+1 误差:δbwi+1=b^wi=b^wi+δbwi+Δt⋅nbwi=δbwi+Δt⋅nbwi
4.5. 加速度零偏误差 δb^ai+1\delta \hat{b}_{a_{i+1}}δb^ai+1
名义值:b^ai+1=b^ai真实值:bai+1=b^ai+δbai+Δt⋅nbai误差:δbai+1=δbai+Δt⋅nbai\begin{aligned} \text { 名义值:} \hat{b}_{a_{ i+1}} &=\hat{b}_{a i} \\ \text { 真实值:} b_{a_{i+1} } &=\hat{b}_{a_i}+\delta b_{a i}+\Delta t \cdot n_{b_{ai}} \\ \text { 误差:} \delta b_{a_{i+1} } &=\delta b_{a i}+\Delta t \cdot n_{b_{ai}} \\ \end{aligned} 名义值:b^ai+1 真实值:bai+1 误差:δbai+1=b^ai=b^ai+δbai+Δt⋅nbai=δbai+Δt⋅nbai
4.6. 整理成矩阵状态空间方程的形式
定义IMU运动学的矩阵状态空间方程形式为
δx^i+1=Fx⋅δx^i+Fw⋅wi\delta \hat{\mathbf{x}}_{i+1}=\mathbf{F}_x \cdot \delta \hat{\mathbf{x}}_i + \mathbf{F}_w \cdot \mathbf{w}_i δx^i+1=Fx⋅δx^i+Fw⋅wi
其中状态变量的定义为:
δx^i=[δr^i,δp^i,δv^i,δb^wi,δb^ai]⊤wi=[δnwi,δnai,δnbwi,δnbai]⊤\begin{aligned} \delta \hat{\mathbf{x}}_i &= \left[\delta \hat{\mathbf{r}}_i, ~~\delta \hat{\mathbf{p}}_i, ~~\delta \hat{\mathbf{v}}_i, ~~\delta \hat{\mathbf{b}}_{wi}, ~~\delta \hat{\mathbf{b}}_{ai}\right]^{\top} \\ \mathbf{w}_i &= \left[\delta\mathbf{n}_{wi}, ~~\delta\mathbf{n}_{ai}, ~~\delta\mathbf{n}_{b_{wi}}, ~~ \delta\mathbf{n}_{b_{ai}}\right]^{\top} \end{aligned} δx^iwi=[δr^i, δp^i, δv^i, δb^wi, δb^ai]⊤=[δnwi, δnai, δnbwi, δnbai]⊤
则系数矩阵为:
Fx=[exp(−ωiΔt^)00−IΔt00IIΔt00−R^i(a^i)×Δt0I0−R^iΔt000I000000]Fω=[−IΔt00000000−R^iΔt0000IΔt0000IΔt]\begin{aligned} \mathbf{F}_x &= \left[\begin{array}{ccccc} \exp \left(-\hat{\omega_i \Delta t}\right) & 0 & 0 & -I \Delta t & 0 \\ 0 & I & I \Delta t & 0 & 0\\ -\hat{R}_i\left(\hat{a}_i\right)_{\times} \Delta t & 0 & I & 0 & -\hat{R}_i \Delta t \\ 0 & 0 & 0 & I & 0 \\ 0 & 0 & 0 & 0 & 0 \end{array}\right] \\\\ F_\omega &=\left[\begin{array}{cccc} -I \Delta t & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 \\ 0 & -\hat{R}_i \Delta t & 0 & 0 \\ 0 & 0 & I \Delta t & 0 \\ 0 & 0 & 0 & I \Delta t \end{array}\right] \end{aligned} FxFω=exp(−ωiΔt^)0−R^i(a^i)×Δt000I0000IΔtI00−IΔt00I000−R^iΔt00=−IΔt000000−R^iΔt00000IΔt00000IΔt
协方差矩阵的传播公式为:
Pi+1=FxPiFx⊤+FωQFω⊤\mathbf{P}_{i+1}=\mathbf{F}_x \mathbf{P}_i \mathbf{F}_x{ }^{\top}+\mathbf{F}_\omega \mathbf{Q} \mathbf{F}_\omega{ }^{\top} Pi+1=FxPiFx⊤+FωQFω⊤
其中 Q\mathbf{Q}Q 为测量噪声的协方差矩阵。
相关文章:
IMU 积分的误差状态空间方程推导
文章目录0. 前言1. 离散时间的IMU运动学方程2. 状态变量定义3. 补充公式4. IMU误差状态空间方程推导4.1. 旋转误差 δr^i1\delta\hat{\mathbf{r}}_{i1}δr^i14.2. 速度误差 δv^i1\delta\hat{\mathbf{v}}_{i1}δv^i14.3. 平移误差 δpi1\delta \mathbf{p}_{i1}δpi14.4. …...

VirtualBox的克隆与复制
快照太多,想整合成1个文件怎么办? 最近,我就遇到一个问题。快照太多了。比较占用空间怎么办? 错误做法 一开始,我是这么操作的,选中某个快照,然后选择删除…然后我登录虚拟机后,发…...

每天5分钟玩转机器学习算法:逆向概率的问题是什么?贝叶斯公式是如何解决的?
本文重点 前面我们已经知道了贝叶斯公式,以及贝叶斯公式在机器学习中的应用,那么贝叶斯公式究竟解决了一个什么样的问题呢?贝叶斯是为了解决逆向概率的问题。 正向的概率和逆向的概率 正向概率:假设袋子里面有N个白球,有M个黑球,你伸手一摸,那么问题就是你摸出黑球的概…...

游戏闲聊之游戏是怎么赚钱的
其实一般情况下不太爱写这种文章,简单说就一点,这个行业的人我惹不起。 1、外挂 所谓外挂,是指通过技术手段,提供辅助游戏的工具,方便玩家获得一些额外的能力; 这事我特意咨询过律师,外挂分两…...
Redis高频面试题汇总(下)
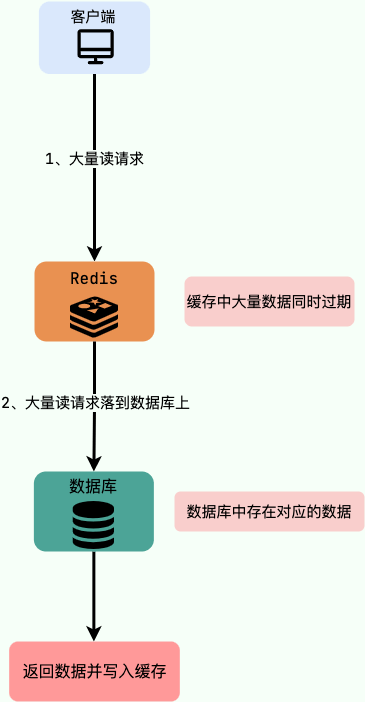
目录 1.Redis中什么是Big Key(大key) 2.Big Key会导致什么问题 3.如何发现 bigkey? 4.为什么redis生产环境慎用keys *命令 5.如何处理大量 key 集中过期问题 6.使用批量操作减少网络传输 7.缓存穿透 8.缓存击穿 9.缓存雪崩 10.缓存污染(或满了…...
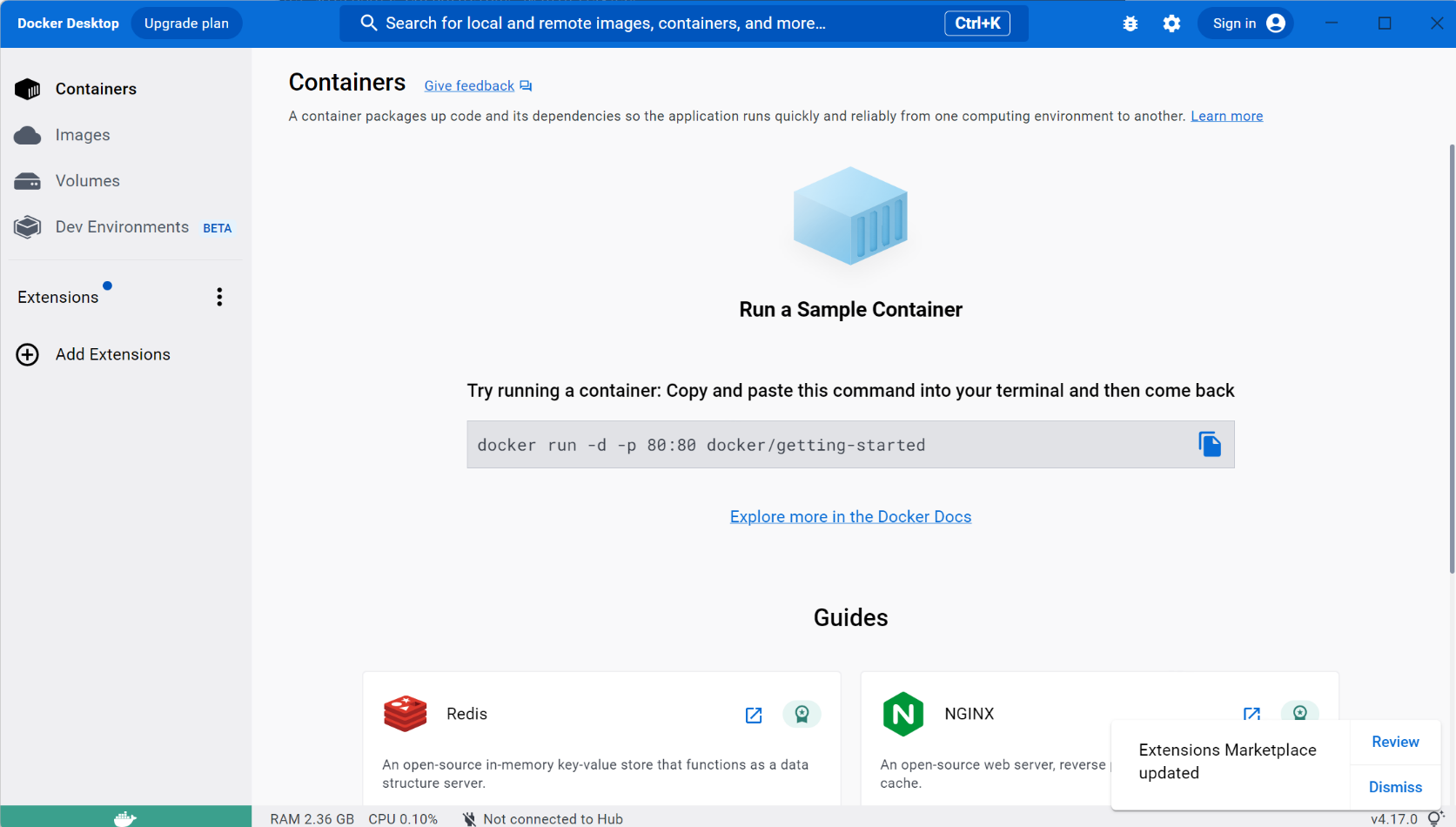
Windows修改Docker安装目录修改Docker镜像目录,镜像默认存储位置存放到其它盘
Windows安装Docker,默认是安装在C盘,下载镜像后会占用大量空间,这时需要调整镜像目录;场景:不想连服务器或者没有服务器,想在本地调试服务,该需求就非常重要。基于WSL2安装docker后,…...
376. 摆动序列——【Leetcode每日刷题】
376. 摆动序列 如果连续数字之间的差严格地在正数和负数之间交替,则数字序列称为 摆动序列 。第一个差(如果存在的话)可能是正数或负数。仅有一个元素或者含两个不等元素的序列也视作摆动序列。 例如, [1, 7, 4, 9, 2, 5] 是一个…...
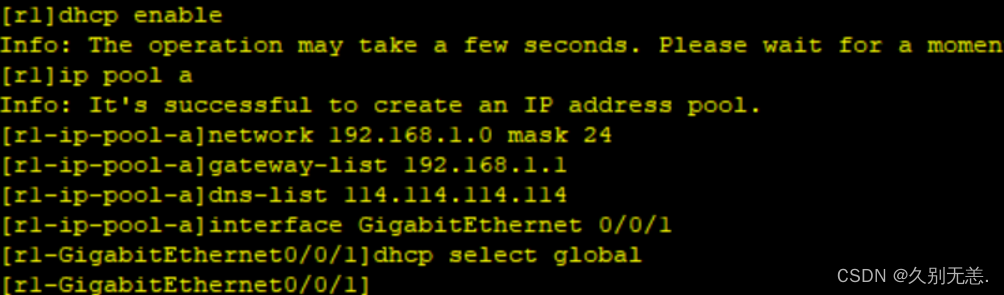
mgre实验
实验思路 1、首先根据拓扑结构合理分配IP地址,并对各个路由器的IP地址和R5环回接口的IP地址进行配置。 2、让私网中的边界路由器对ISP路由器做缺省路由。 3、根据实验要求,对需要配置不同类型认证的路由器进行认证配置,和需要不同封装的协议…...
)
一文彻底了解Zookeeper(介绍篇)
zookeeper 是什么? zookeeper是一个分布式协作框架,提供高可用,高性能,强一致等特性 zookeeper 有哪些应用场景? 分布式锁:分布式锁是指在分布式环境中,多个进程或线程需要互斥地访问某个共享…...
1. ELK Stack 理论篇之什么是ELK Stack?
ELK Stack 理论篇之什么是ELK Stack?1.1 什么是 ELK Stack?1.2 ELK Stack的发展史1.2.1 Elasticsearch1.2.2 引入 Logstash 和 Kibana,产品更强大1.2.3 社区越来越壮大,用例越来越丰富1.2.4 然后我们向 ELK 中加入了 Beats1.2.5 那么&#x…...
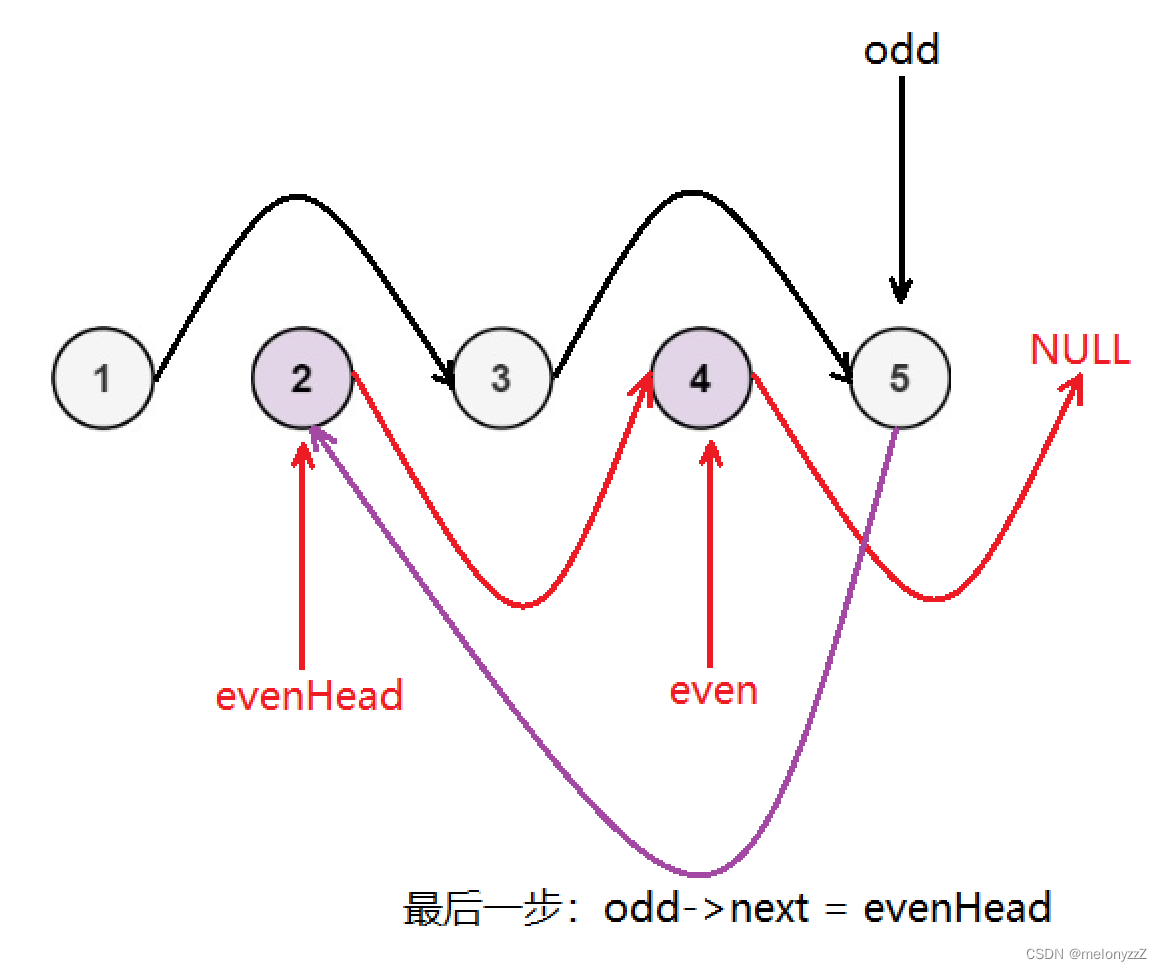
两道有关链表的练习
目录 一、分割链表 二、奇偶链表 一、分割链表 给你一个链表的头节点 head 和一个特定值 x ,请你对链表进行分隔,使得所有 小于 x 的节点都出现在 大于或等于 x 的节点之前。 你不需要 保留 每个分区中各节点的初始相对位置。 示例 1: 输…...
Python uiautomator2安卓自动化测试
一、前言 uiautomator2是Python对Android设备进行UI自动化的库,支持USB和WIFI链接,可以实现获取屏幕上任意一个APP的任意一个控件属性,并对其进行任意操作。 重点是它可以实现安卓自动化采集,甚至是群控采集,且安装和…...

Leetcode. 160相交链表
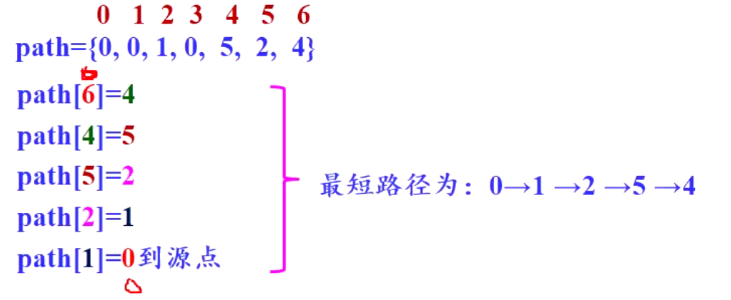
文章目录指针解法指针解法 核心思路 : 先 分别求两个链表的长度 然后长的链表先走 差距步(长-短) 最后长链表和短链表同时走 ,第一地址相同的就是交点 ,注意一定是地址相同 不可能出现上图这种情况 ,因为C1…...
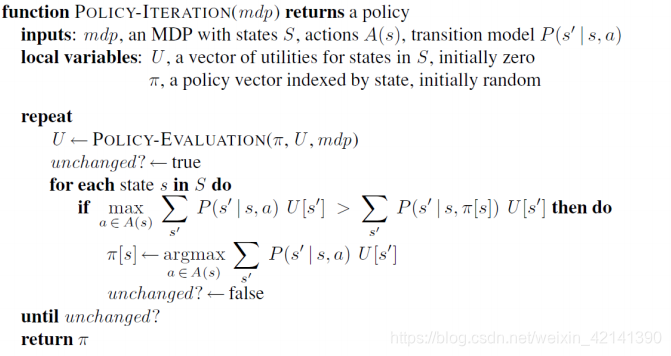
MDPs —— 马尔可夫决策定义与算法
文章目录MDPs 定义——由实例开始时序决策问题给游戏增点乐子*为什么要有折扣游戏的解——原则所以,什么是 MDPs?MDPs 的基本原理、表示光环原理效用的求解是反向传播的原则不变条件MDPs 的表示MDPs 求解效用迭代法缺点原则迭代法MDPs 定义——由实例开始…...
【C++】图
本文包含了图的基本概念 1.相关概念 1.1 无/有向 无向图:每一个顶点之间的连线没有方向 有向图:连线有方向(类似离散数学的二元关系 <A,B>代表从A到B的边,有方向) <A,B>中A为始点,B为终点在…...

尾递归优化
文章目录1. 前言2. 什么尾调用(Tail Call)?3. 尾调用优化4. Linux内核下的尾递归优化使用5. 参考资料1. 前言 限于作者能力水平,本文可能存在谬误,对此给读者带来的损失,作者不错任何承诺。 2. 什么尾调用…...
P1120 小木棍(搜索+剪枝)
题目链接:P1120 小木棍 - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) 样例输入: 9 5 2 1 5 2 1 5 2 1 样例输出: 6 分析:这道题一看数据范围就知道是搜索,但关键是需要剪枝。 首先我们求出所有木棍的长度和&am…...
【专项训练】动态规划-3
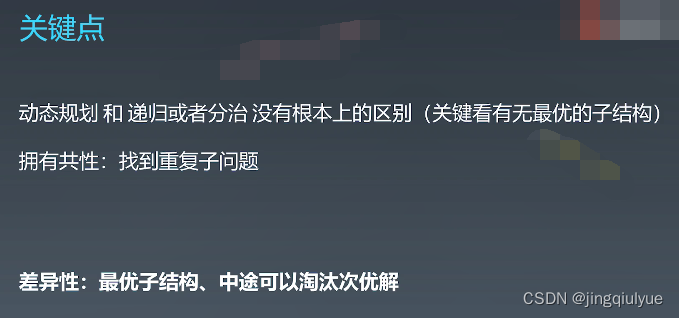
动态规划:状态转移方程、找重复性和最优子结构 分治 + 记忆化搜索,可以过度到动态规划(动态递推) function DP():# DP状态定义# 需要经验,需把现实问题定义为一个数组,一维、二维、三维……dp =[][] # 二维情况for i = 0...M:...
【Linux】信号+再谈进程地址空间
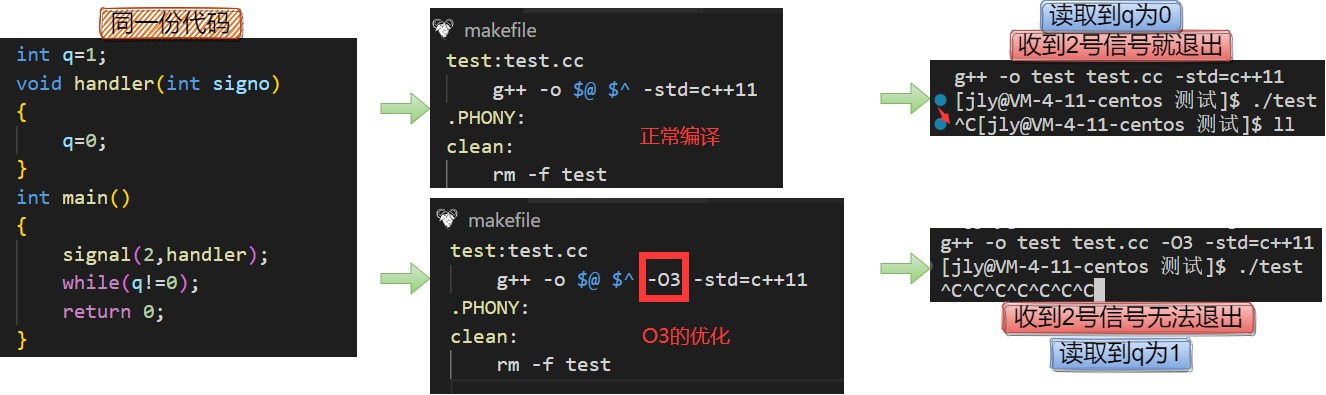
目录 一、Linux中的信号 1、Linux中的信号 2、进程对信号的处理 3、信号的释义 二、信号的捕捉 1、信号的捕捉signal() 2、信号的捕捉sigaction() 三、信号如何产生? 1、kill()用户调用kill向操作系统发送信号 通过命令行参数模仿写一个kill命令 2、rais…...
C++回顾(二十一)—— list容器
21.1 list概述 list是一个双向链表容器,可高效地进行插入删除元素。list不可以随机存取元素,所以不支持at.(pos)函数与[]操作符。It(ok) it5(err)需要添加头文件:#include <list> 21.2 list构造 (1)默认构造…...

抖音图片怎么去水印?2026年在线去水印工具+方法盘点,总有一款适合你
开篇:为什么要去水印? 保存抖音图片时,总会遇到水印的困扰。这些水印包含抖音logo、发布者名称,有时还会有账号信息。对于自媒体创作者、内容整理者或普通用户来说,去除水印往往是必需的。本文将介绍当下最实用的抖音图…...

ADXL335模拟传感器读数不稳?手把手教你用Arduino进行软件滤波与校准
ADXL335模拟传感器读数不稳?手把手教你用Arduino进行软件滤波与校准 当你把ADXL335加速度计接入Arduino,兴奋地跑起第一个测试程序时,那些跳动的数字可能很快会浇灭你的热情。原始读数像得了疟疾般颤抖,静止时本该稳定的1g重力加速…...

Java 大厂面试 200 题完整版含答案解析
前言本文整理了近两年从阿里、腾讯、字节、美团、京东、拼多多等大厂面试中高频出现的 200 道 Java 面试题,覆盖 Java 基础、集合、并发、JVM、Spring、MySQL、Redis、消息队列、分布式、场景设计 等核心模块,每题都附有简明扼要的答案解析,助…...

AI驱动命令行工具:用自然语言自动化开发任务
1. 项目概述:一个为开发者“下厨”的AI助手如果你是一名开发者,每天在终端里敲打命令,构建、部署、调试,那么你肯定对重复性的命令行操作感到厌倦。比如,每次启动一个新项目,都要手动创建目录结构、初始化G…...

Kubernetes自动化更新利器Keel:实现容器镜像的持续部署
1. 项目概述:为什么我们需要一个“自动化的应用更新管家”? 如果你和我一样,负责维护着几个、十几个,甚至几十个运行在Kubernetes或Docker环境中的应用,那你一定对“更新”这件事又爱又恨。爱的是,新版本意…...

CompressO:终极跨平台视频图片压缩神器,轻松解决存储难题
CompressO:终极跨平台视频图片压缩神器,轻松解决存储难题 【免费下载链接】compressO Convert any video/image into a tiny size. 100% free & open-source. Available for Mac, Windows & Linux. 项目地址: https://gitcode.com/gh_mirrors/…...
用户指引自助教学源码—东方仙盟)
未来之窗昭和仙君(九十四)用户指引自助教学源码—东方仙盟
软件教学引导功能说明书未来之窗昭和仙君 - cyberwin_fairyalliance_webquery一、功能概述软件教学引导功能主要用于为用户提供软件操作的引导,通过一系列步骤逐步引导用户完成软件的重要操作。该功能会创建遮罩层、高亮框和提示框,引导用户点击特定元素…...

MQ-3与MiCS-5524气体传感器对比:从原理到实战的选型指南
1. 项目概述与核心价值在嵌入式开发、环境监测乃至一些创意DIY项目中,气体检测是一个常见且关键的需求。无论是为了安全预警(如天然气泄漏),还是进行环境质量评估(如VOC监测),选择一款合适的传感…...

我给了智能体$100去赚钱,结果...
你看过那些演示。一个自主智能体启动,获得一个目标,然后——跳到两周后的 Twitter 帖子——它不知怎么地就在运营一个 Shopify 店铺、写通讯和炒币了。未来已来。AGI 即将降临。买课吧。 我想找出实际发生了什么。 所以我给了一个智能体 100 美元和一个…...

MCP服务器生产级部署:从Docker到Kubernetes的完整工程化实践
1. 项目概述:一个为MCP服务器量身定制的部署蓝图如果你正在开发或使用一个基于模型上下文协议(Model Context Protocol, MCP)的服务器,并且为如何将其优雅、可靠地部署到生产环境而头疼,那么你很可能需要的…...