滤波算法 | 无迹卡尔曼滤波(UKF)算法及其Python实现
文章目录
- 简介
- UKF滤波
- 1. 概述和流程
- 2. Python代码
- 第一个版本
- a. KF滤波
- b. UKF滤波
- 第二个版本
简介
上一篇文章,我们介绍了UKF滤波公式及其MATLAB代码。在做视觉测量的过程中,基于OpenCV的开发包比较多,因此我们将UKF的MATLAB代码转到python中,实现数据滤波效果。
UKF滤波
1. 概述和流程
UKF的公式这里就不再过多介绍了,具体内容请参见博客:UKF滤波公式及其MATLAB代码
这里简单把上一篇文章的公式和流程图粘贴一下。
求解流程 :
-
相比于一般的卡尔曼滤波,UKF算法增加了两次无迹变换,公式为:

权重和方差计算公式为:

-
Sigma点传播:

- 计算x的预测值和协方差矩阵:

4. 得到一组新的Sigma点:

5. 代入观测方程中,得到测量量的预估值:
![]()
- 获得观测量的预测值和协方差矩阵:

- 更新状态变量和协方差矩阵:



另外,每次写论文画卡尔曼流程图中,都找不到参考的模板。我自己画了个滤波流程图,不一定符合每个人的审美,以备参考:

2. Python代码
重点来了。。。
上代码。
第一个版本
UKF的python代码我一共写了两个版本。
第一个是我用ChatGPT直接生成了一个,经过数据实测,结果有点奇怪,不太像我想要的结果,每个模块之间的交互也跟我理解的不太一样。为了对比,这里也还是贴出来了,人家写的确实比我写的看着逼格好点。
ChatGPT输出的Python:
a. KF滤波
class KalmanFilter:def __init__(self, F, H, Q, R, P, x0):self.F = Fself.H = Hself.Q = Qself.R = Rself.P = Pself.x = x0def predict(self):self.x = self.F @ self.xself.P = self.F @ self.P @ self.F.T + self.Qdef update(self, z):y = z - self.H @ self.xS = self.H @ self.P @ self.H.T + self.RK = self.P @ self.H.T @ np.linalg.inv(S)self.x = self.x + K @ yself.P = (np.eye(len(self.x)) - K @ self.H) @ self.P
b. UKF滤波
import numpy as np
from scipy.linalg import sqrtmclass UKF:def __init__(self, f, h, Q, R, P, x0):self.f = fself.h = hself.Q = Qself.R = Rself.P = Pself.x = x0self.n = x0.shape[0]self.m = Nonedef predict(self):# Generate sigma pointsL = np.linalg.cholesky(self.P)W = np.concatenate((np.zeros((self.n, 1)), sqrtm(self.n * self.P)))X = np.concatenate((self.x, self.x + W, self.x - W), axis=1)# Predict sigma pointsY = np.zeros((self.n, 2 * self.n + 1))for i in range(2 * self.n + 1):Y[:, i] = self.f(X[:, i])# Compute mean and covarianceself.x = np.mean(Y, axis=1, keepdims=True)self.P = np.cov(Y) + self.Qdef update(self, z):# Generate sigma pointsL = np.linalg.cholesky(self.P)W = np.concatenate((np.zeros((self.n, 1)), sqrtm(self.n * self.P)))X = np.concatenate((self.x, self.x + W, self.x - W), axis=1)# Predict measurementsZ = np.zeros((self.m, 2 * self.n + 1))for i in range(2 * self.n + 1):Z[:, i] = self.h(X[:, i])# Compute mean and covariancez_mean = np.mean(Z, axis=1, keepdims=True)z_cov = np.cov(Z) + self.R# Compute cross-covariancexz_cov = np.zeros((self.n, self.m))for i in range(2 * self.n + 1):xz_cov += (X[:, i, np.newaxis] - self.x) @ (Z[:, i, np.newaxis] - z_mean).Txz_cov /= 2 * self.n# Compute Kalman gainK = xz_cov @ np.linalg.inv(z_cov)# Update estimateself.x += K @ (z - z_mean)self.P -= K @ z_cov @ K.T第二个版本
第二个是我自己改的一个。参考MATLAB的流程,直接改成了python代码,没有做代码的优化,结果还挺好的,和MATLAB结果一致。
import mathimport numpy as np
from scipy.linalg import sqrtmclass ukf:def __init__(self, f, h):self.f = fself.h = hself.Q = Noneself.R = Noneself.P = Noneself.x = Noneself.Z = Noneself.n = Noneself.m = Nonedef GetParameter(self, Q, R, P, x0):self.Q = Qself.R = Rself.P = Pself.x = x0self.n = x0.shape[0]self.m = Nonedef sigmas(self,x0, c):A = c * np.linalg.cholesky(self.P).TY = (self.x * np.ones((self.n,self.n))).TXset = np.concatenate((x0.reshape((-1,1)), Y+A, Y-A), axis=1)return Xsetdef ut1(self, Xsigma, Wm, Wc):LL = Xsigma.shape[1]Xmeans = np.zeros((self.n,1))Xsigma_pre = np.zeros((self.n, LL))for k in range(LL):Xsigma_pre[:,k] = self.f(Xsigma[:,k])Xmeans = Xmeans + Wm[0,k]* Xsigma_pre[:, k].reshape((self.n, 1))Xdiv = Xsigma_pre - np.tile(Xmeans,(1,LL))P = np.dot(np.dot(Xdiv, np.diag(Wc.reshape((LL,)))), Xdiv.T) + self.Qreturn Xmeans, Xsigma_pre, P, Xdivdef ut2(self, Xsigma, Wm, Wc, m):LL = Xsigma.shape[1]Xmeans = np.zeros((m, 1))Xsigma_pre = np.zeros((m, LL))for k in range(LL):Xsigma_pre[:, k] = self.h(Xsigma[:, k])Xmeans = Xmeans + Wm[0, k] * Xsigma_pre[:, k].reshape((m, 1))Xdiv = Xsigma_pre - np.tile(Xmeans, (1, LL))P = np.dot(np.dot(Xdiv, np.diag(Wc.reshape((LL,)))), Xdiv.T) + self.Rreturn Xmeans, Xsigma_pre, P, Xdivdef OutPutParameter(self, alpha_msm, x0, Q, R, P):z = np.array(alpha_msm).reshape((3, 1))self.GetParameter(Q, R, P, x0)l = self.nm = z.shape[0]alpha = 2ki = 3 - lbeta = 2lamb = alpha ** 2 * (l + ki) - lc = l + lambWm = np.concatenate((np.array(lamb / c).reshape((-1,1)), 0.5 / c + np.zeros((1, 2 * l))), axis=1)Wc = Wm.copy()Wc[0][0] = Wc[0][0] + (1 - alpha ** 2 + beta)c = math.sqrt(c)Xsigmaset = self.sigmas(x0, c)X1means, X1, P1, X2 = self.ut1(Xsigmaset, Wm, Wc)Zpre, Z1, Pzz, Z2 = self.ut2(X1, Wm, Wc, m)Pxz = np.dot(np.dot(X2 , np.diag(Wc.reshape((self.n*2+1,)))), Z2.T)K =np.dot(Pxz , np.linalg.inv(Pzz))X = (X1means + np.dot(K, z - Zpre)).reshape((-1,))self.P = P1 - np.dot(K , Pxz.T)return X, self.P这里把两个代码都公开出来,以供参考。
如有疑问,欢迎提问和指正。
相关文章:
滤波算法 | 无迹卡尔曼滤波(UKF)算法及其Python实现
文章目录简介UKF滤波1. 概述和流程2. Python代码第一个版本a. KF滤波b. UKF滤波第二个版本简介 上一篇文章,我们介绍了UKF滤波公式及其MATLAB代码。在做视觉测量的过程中,基于OpenCV的开发包比较多,因此我们将UKF的MATLAB代码转到python中&a…...

IMU 积分的误差状态空间方程推导
文章目录0. 前言1. 离散时间的IMU运动学方程2. 状态变量定义3. 补充公式4. IMU误差状态空间方程推导4.1. 旋转误差 δr^i1\delta\hat{\mathbf{r}}_{i1}δr^i14.2. 速度误差 δv^i1\delta\hat{\mathbf{v}}_{i1}δv^i14.3. 平移误差 δpi1\delta \mathbf{p}_{i1}δpi14.4. …...

VirtualBox的克隆与复制
快照太多,想整合成1个文件怎么办? 最近,我就遇到一个问题。快照太多了。比较占用空间怎么办? 错误做法 一开始,我是这么操作的,选中某个快照,然后选择删除…然后我登录虚拟机后,发…...

每天5分钟玩转机器学习算法:逆向概率的问题是什么?贝叶斯公式是如何解决的?
本文重点 前面我们已经知道了贝叶斯公式,以及贝叶斯公式在机器学习中的应用,那么贝叶斯公式究竟解决了一个什么样的问题呢?贝叶斯是为了解决逆向概率的问题。 正向的概率和逆向的概率 正向概率:假设袋子里面有N个白球,有M个黑球,你伸手一摸,那么问题就是你摸出黑球的概…...

游戏闲聊之游戏是怎么赚钱的
其实一般情况下不太爱写这种文章,简单说就一点,这个行业的人我惹不起。 1、外挂 所谓外挂,是指通过技术手段,提供辅助游戏的工具,方便玩家获得一些额外的能力; 这事我特意咨询过律师,外挂分两…...
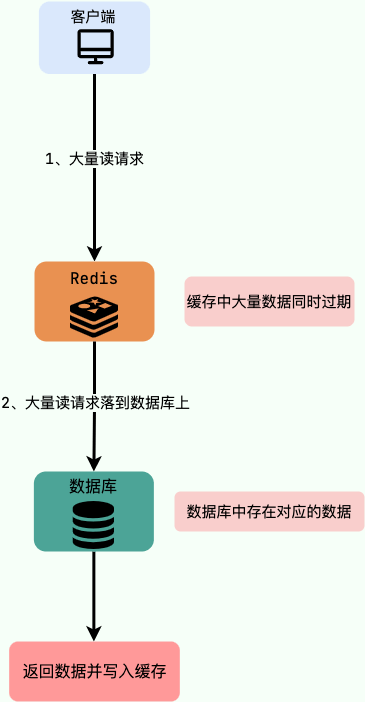
Redis高频面试题汇总(下)
目录 1.Redis中什么是Big Key(大key) 2.Big Key会导致什么问题 3.如何发现 bigkey? 4.为什么redis生产环境慎用keys *命令 5.如何处理大量 key 集中过期问题 6.使用批量操作减少网络传输 7.缓存穿透 8.缓存击穿 9.缓存雪崩 10.缓存污染(或满了…...
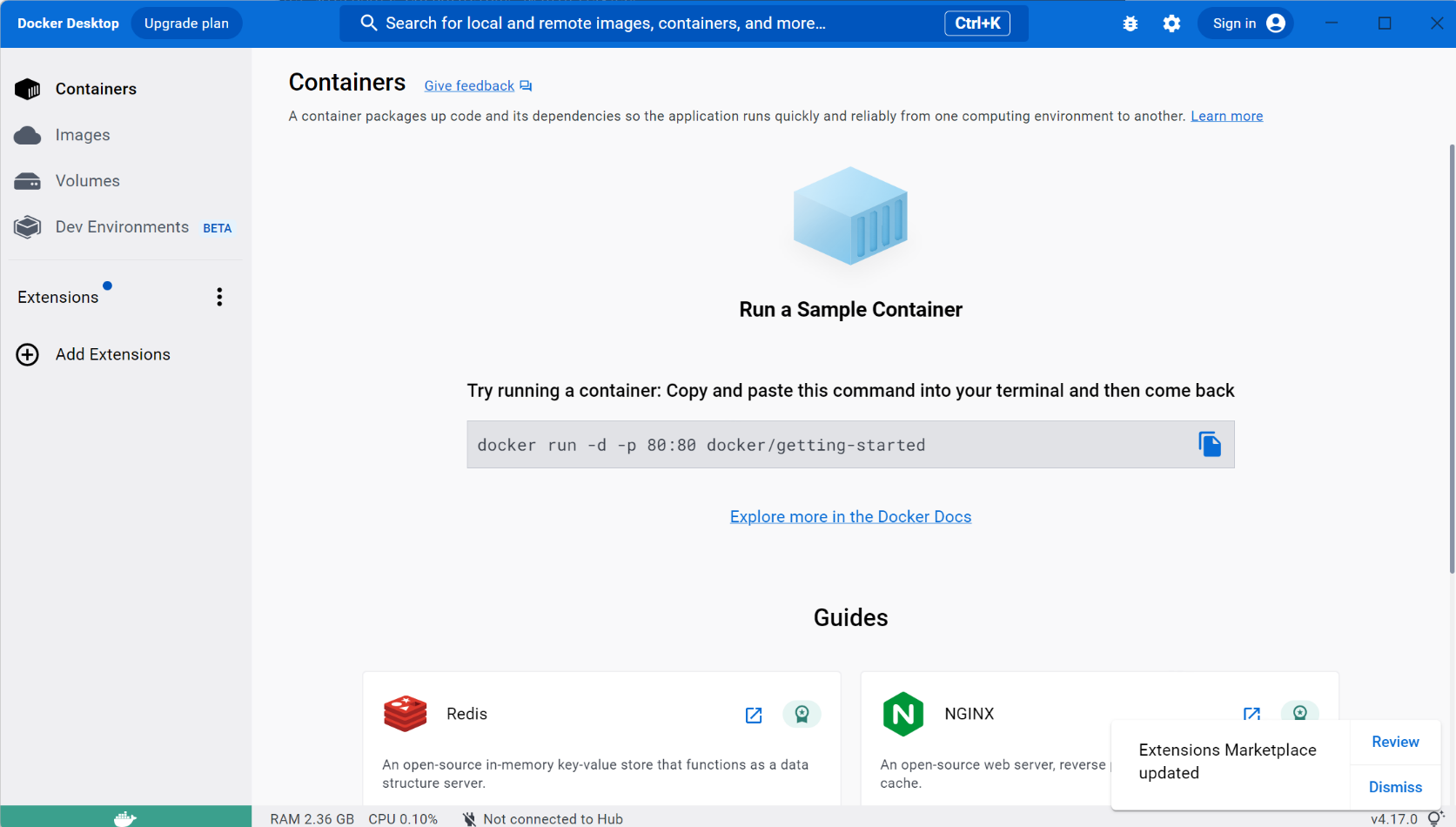
Windows修改Docker安装目录修改Docker镜像目录,镜像默认存储位置存放到其它盘
Windows安装Docker,默认是安装在C盘,下载镜像后会占用大量空间,这时需要调整镜像目录;场景:不想连服务器或者没有服务器,想在本地调试服务,该需求就非常重要。基于WSL2安装docker后,…...
376. 摆动序列——【Leetcode每日刷题】
376. 摆动序列 如果连续数字之间的差严格地在正数和负数之间交替,则数字序列称为 摆动序列 。第一个差(如果存在的话)可能是正数或负数。仅有一个元素或者含两个不等元素的序列也视作摆动序列。 例如, [1, 7, 4, 9, 2, 5] 是一个…...
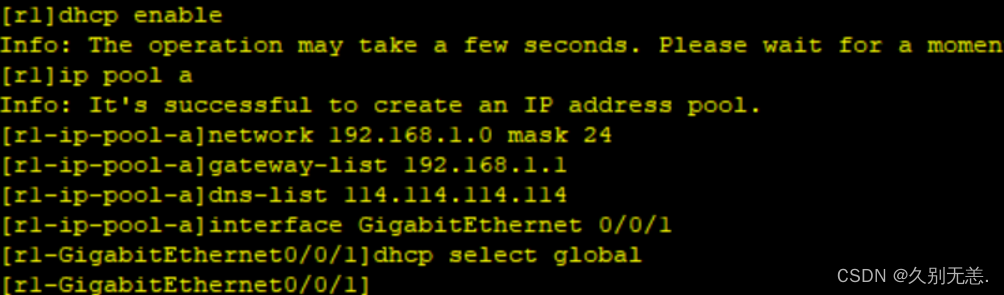
mgre实验
实验思路 1、首先根据拓扑结构合理分配IP地址,并对各个路由器的IP地址和R5环回接口的IP地址进行配置。 2、让私网中的边界路由器对ISP路由器做缺省路由。 3、根据实验要求,对需要配置不同类型认证的路由器进行认证配置,和需要不同封装的协议…...
)
一文彻底了解Zookeeper(介绍篇)
zookeeper 是什么? zookeeper是一个分布式协作框架,提供高可用,高性能,强一致等特性 zookeeper 有哪些应用场景? 分布式锁:分布式锁是指在分布式环境中,多个进程或线程需要互斥地访问某个共享…...
1. ELK Stack 理论篇之什么是ELK Stack?
ELK Stack 理论篇之什么是ELK Stack?1.1 什么是 ELK Stack?1.2 ELK Stack的发展史1.2.1 Elasticsearch1.2.2 引入 Logstash 和 Kibana,产品更强大1.2.3 社区越来越壮大,用例越来越丰富1.2.4 然后我们向 ELK 中加入了 Beats1.2.5 那么&#x…...
两道有关链表的练习
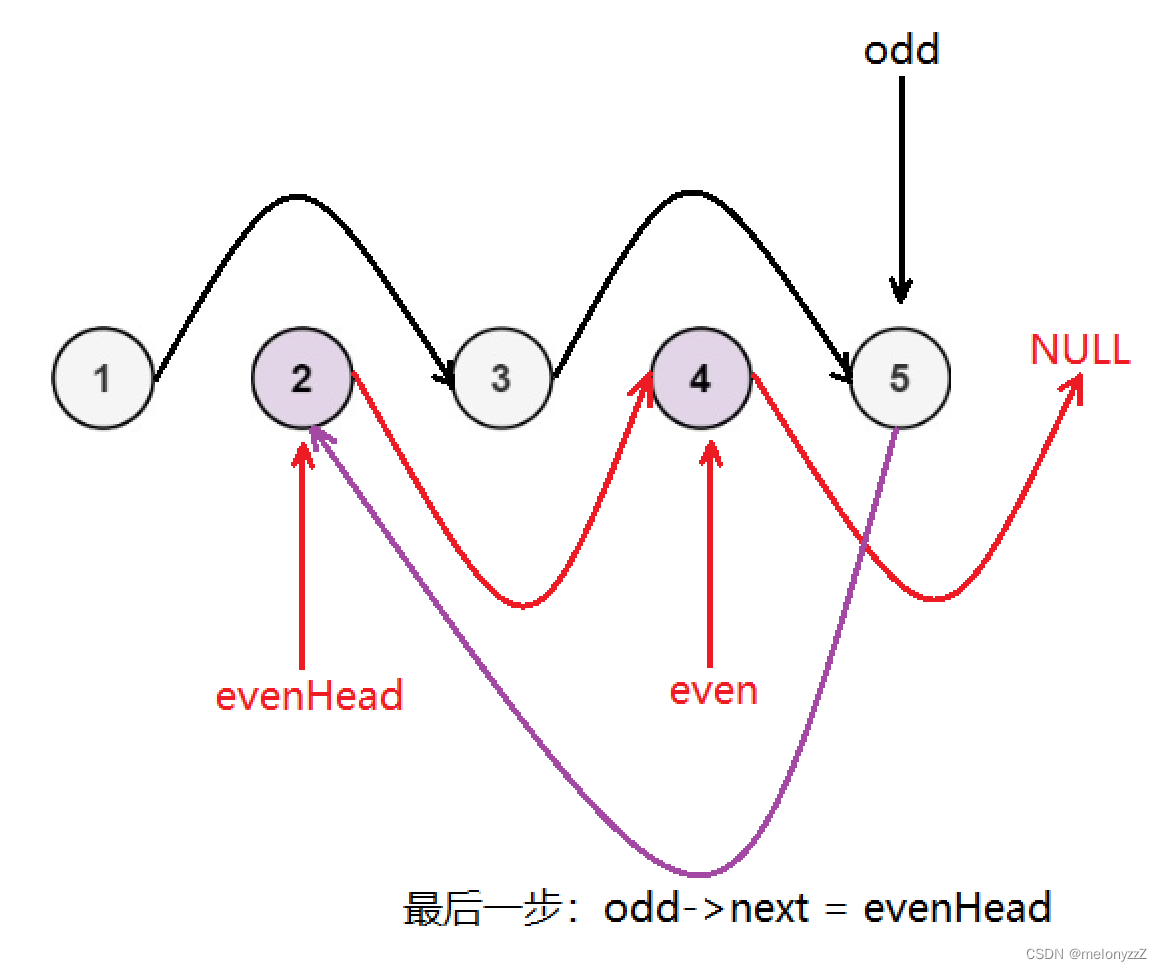
目录 一、分割链表 二、奇偶链表 一、分割链表 给你一个链表的头节点 head 和一个特定值 x ,请你对链表进行分隔,使得所有 小于 x 的节点都出现在 大于或等于 x 的节点之前。 你不需要 保留 每个分区中各节点的初始相对位置。 示例 1: 输…...
Python uiautomator2安卓自动化测试
一、前言 uiautomator2是Python对Android设备进行UI自动化的库,支持USB和WIFI链接,可以实现获取屏幕上任意一个APP的任意一个控件属性,并对其进行任意操作。 重点是它可以实现安卓自动化采集,甚至是群控采集,且安装和…...

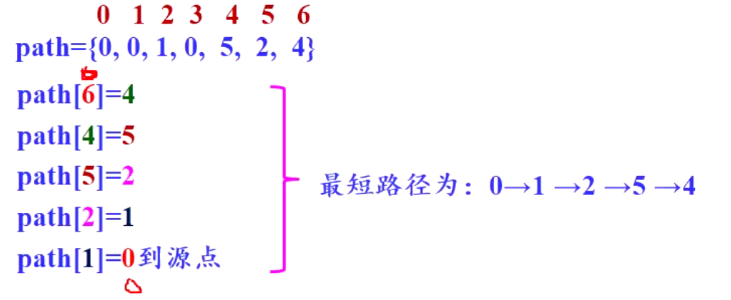
Leetcode. 160相交链表
文章目录指针解法指针解法 核心思路 : 先 分别求两个链表的长度 然后长的链表先走 差距步(长-短) 最后长链表和短链表同时走 ,第一地址相同的就是交点 ,注意一定是地址相同 不可能出现上图这种情况 ,因为C1…...
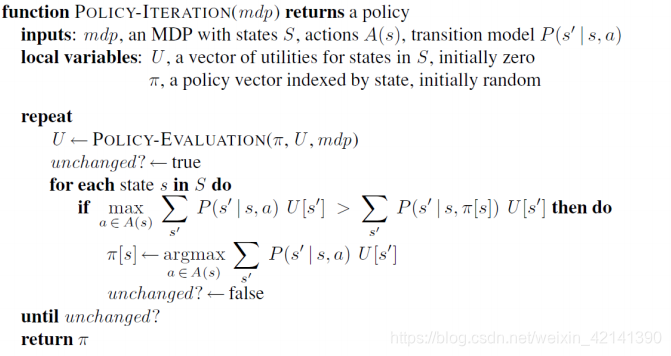
MDPs —— 马尔可夫决策定义与算法
文章目录MDPs 定义——由实例开始时序决策问题给游戏增点乐子*为什么要有折扣游戏的解——原则所以,什么是 MDPs?MDPs 的基本原理、表示光环原理效用的求解是反向传播的原则不变条件MDPs 的表示MDPs 求解效用迭代法缺点原则迭代法MDPs 定义——由实例开始…...
【C++】图
本文包含了图的基本概念 1.相关概念 1.1 无/有向 无向图:每一个顶点之间的连线没有方向 有向图:连线有方向(类似离散数学的二元关系 <A,B>代表从A到B的边,有方向) <A,B>中A为始点,B为终点在…...

尾递归优化
文章目录1. 前言2. 什么尾调用(Tail Call)?3. 尾调用优化4. Linux内核下的尾递归优化使用5. 参考资料1. 前言 限于作者能力水平,本文可能存在谬误,对此给读者带来的损失,作者不错任何承诺。 2. 什么尾调用…...
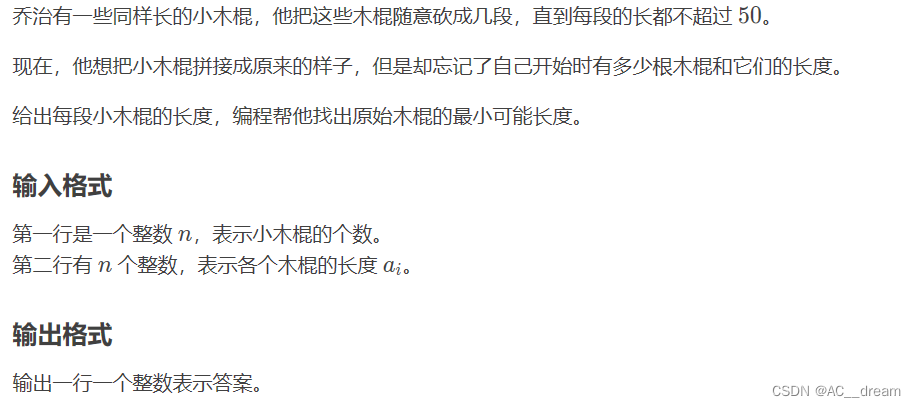
P1120 小木棍(搜索+剪枝)
题目链接:P1120 小木棍 - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) 样例输入: 9 5 2 1 5 2 1 5 2 1 样例输出: 6 分析:这道题一看数据范围就知道是搜索,但关键是需要剪枝。 首先我们求出所有木棍的长度和&am…...
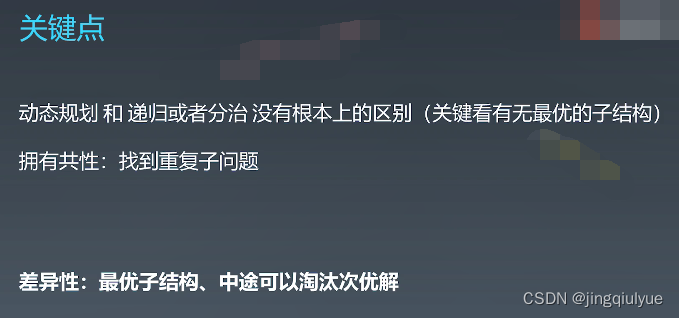
【专项训练】动态规划-3
动态规划:状态转移方程、找重复性和最优子结构 分治 + 记忆化搜索,可以过度到动态规划(动态递推) function DP():# DP状态定义# 需要经验,需把现实问题定义为一个数组,一维、二维、三维……dp =[][] # 二维情况for i = 0...M:...
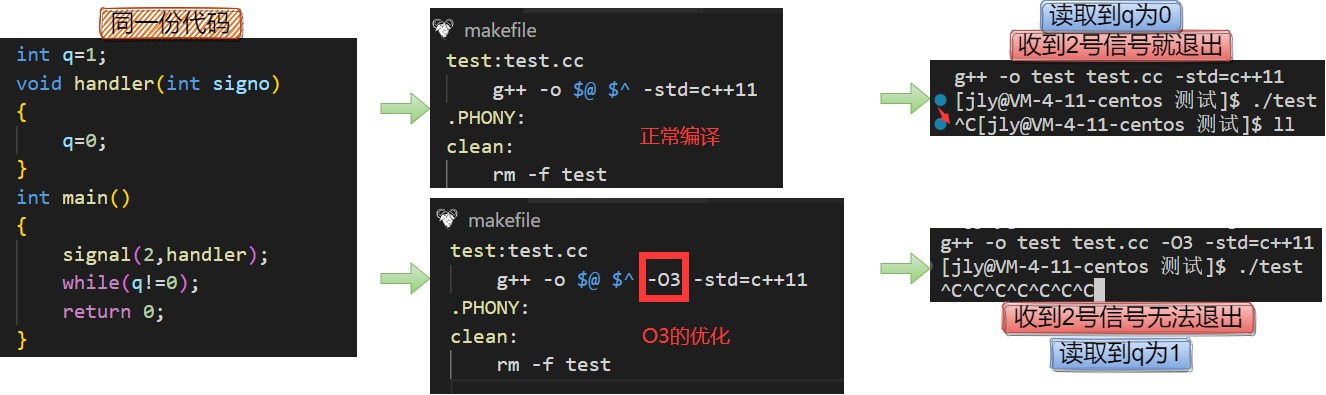
【Linux】信号+再谈进程地址空间
目录 一、Linux中的信号 1、Linux中的信号 2、进程对信号的处理 3、信号的释义 二、信号的捕捉 1、信号的捕捉signal() 2、信号的捕捉sigaction() 三、信号如何产生? 1、kill()用户调用kill向操作系统发送信号 通过命令行参数模仿写一个kill命令 2、rais…...

医疗设备软件设计的核心挑战与安全实践
1. 医疗设备软件设计的核心挑战医疗设备软件设计正面临着前所未有的复杂性和风险。作为一名在医疗设备行业工作多年的工程师,我亲眼见证了计算机技术如何彻底改变了这个领域。现代手术室和重症监护病房中,那些曾经独立的监护仪、输液泵和呼吸机ÿ…...

Java版Dify SDK:简化LLM应用开发,提升Java生态集成效率
1. 项目概述:为什么我们需要一个Java版的Dify SDK?如果你正在用Java构建一个需要集成大语言模型能力的应用,比如一个智能客服系统、一个文档分析工具,或者一个创意写作助手,你很可能听说过Dify。Dify作为一个开源的LLM…...

OpenAI Cookbook中文版:AI应用开发实战指南与工程化实践
1. 项目概述:一份面向中文开发者的AI应用开发“菜谱”最近在GitHub上看到一个挺有意思的项目,叫yunwei37/openai-cookbook-zh-cn。简单来说,这就是OpenAI官方那个大名鼎鼎的openai-cookbook仓库的中文翻译版。但如果你觉得它仅仅是个翻译&…...

OpenMCP:一站式MCP开发调试套件,从调试到部署的完整解决方案
1. 项目概述:OpenMCP,一个为MCP开发者打造的“瑞士军刀”如果你正在或打算开发基于Model Context Protocol(MCP)的AI应用,那你一定遇到过这样的困境:好不容易写好了MCP Server,却不知道如何高效…...

Go语言轻量级HTTP代理curxy:开发调试与本地环境配置利器
1. 项目概述:一个轻量级的HTTP代理工具最近在折腾一些本地开发环境,特别是需要处理跨域请求或者模拟不同网络环境的时候,总是绕不开代理工具。市面上的方案很多,从功能强大的Nginx、Caddy,到各种语言的中间件ÿ…...

NVIDIA Profile Inspector深度指南:解锁显卡隐藏性能的完整教程
NVIDIA Profile Inspector深度指南:解锁显卡隐藏性能的完整教程 【免费下载链接】nvidiaProfileInspector 项目地址: https://gitcode.com/gh_mirrors/nv/nvidiaProfileInspector 还在为游戏画面撕裂、输入延迟高、帧率不稳定而烦恼吗?NVIDIA Pr…...

深入了解Python并发编程
并发方式 线程([Thread]) 多线程几乎是每一个程序猿在使用每一种语言时都会首先想到用于解决并发的工具(JS程序员请回避),使用多线程可以有效的利用CPU资源(Python例外)。然而多线程所带来的程…...

5个技巧完全掌握Video Subtitle Remover:AI硬字幕去除终极指南
5个技巧完全掌握Video Subtitle Remover:AI硬字幕去除终极指南 【免费下载链接】video-subtitle-remover 基于AI的图片/视频硬字幕去除、文本水印去除,无损分辨率生成去字幕、去水印后的图片/视频文件。无需申请第三方API,本地实现。AI-based…...

从S-Function到系统级验证:构建可复用的16QAM Simulink自定义模块库
1. 为什么需要自定义Simulink模块库 在通信系统仿真中,我们经常遇到标准模块库无法满足特定需求的情况。就拿16QAM调制解调来说,虽然Simulink自带通信工具箱,但实际项目中往往需要更灵活的配置和更直观的参数调整界面。我刚开始做通信仿真时…...

使用Python快速编写第一个调用Taotoken大模型的脚本
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 使用Python快速编写第一个调用Taotoken大模型的脚本 对于希望快速体验大模型能力的Python开发者而言,直接对接多个厂商…...