XTDrone-固定翼无人机编队跟踪无人车-配置教程
配置使用ROS版本为Neotic
1 配置
1.1 加载固定翼无人机编队跟踪控制工程文件
cp -r ~/XTDrone/coordination/fixed_wing_formation_control ~/catkin_ws/src1.2 加载一些用到的功能包
sudo apt-get install ros-noetic-serial #根据自己的ROS版本修改
sudo apt-get install libpcap-dev
sudo apt-get install ros-noetic-velocity-controllers
sudo apt-get install ros-noetic-gazebo-msgs1.3 安装一些必要的依赖
cp -r ~/XTDrone/sitl_config/gazebo_ros_pkgs ~/catkin_ws/src #若已在基础配置中完成则忽略此步骤
cp -r ~/XTDrone/sitl_config/ugv/* ~/catkin_ws/src
cp -r ~/XTDrone/sitl_config/gazebo_plugin/velodyne ~/catkin_ws/src1.4 将launch文件装入PX4的launch文件夹中
cd ~/catkin_ws/src/fixed_wing_formation_control/launchfile
cp fixed_wing_formation_control.launch ~/PX4_Firmware/launch1.5 在/catkin_ws/devel/include下创建一个功能包fixed_wing_formation_control,并将/catkin_ws/src/fixed_wing_formation_control/headerfile中的头文件拷贝到创建的fixed_wing_formation_control中。
mkdir -p ~/catkin_ws/devel/include/fixed_wing_formation_control
cd ~/catkin_ws/src/fixed_wing_formation_control/headerfile
cp Formation_control_states.h FWcmd.h Fw_cmd_mode.h Fw_current_mode.h Fwmonitor.h FWstates.h Leaderstates.h ~/catkin_ws/devel/include/fixed_wing_formation_control备注:一定要先执行这个一步之后再编译,否则会出现如下报错:
1.6 编译
cd ~/catkin_ws
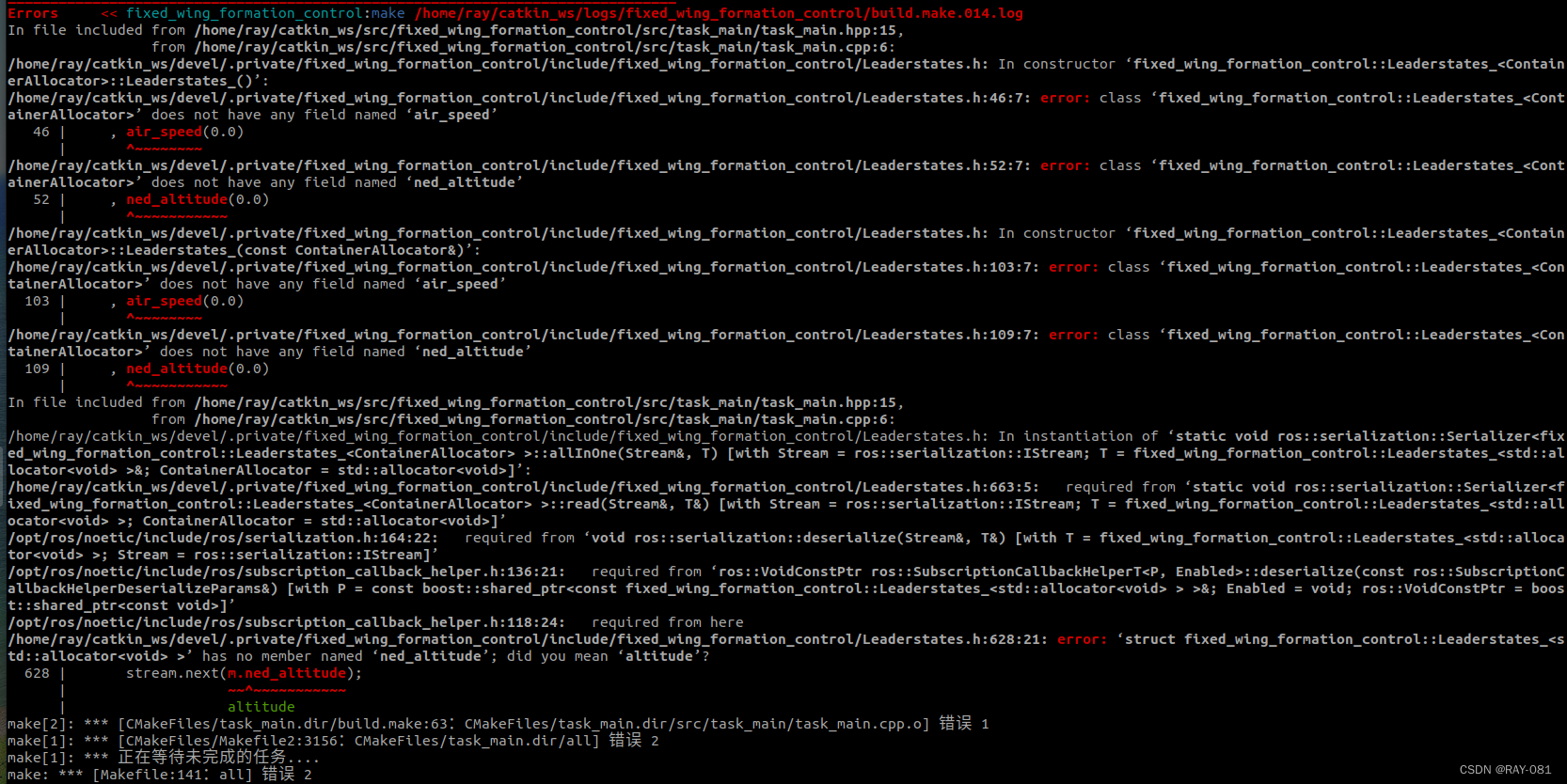
catkin build编译的过程中可能会出现如下报错:

错因分析:task_main.cpp文件中的参数“airspeed“与Leaderstates. msg文件中的参数名不同。
解决方法:
a.打开Leaderstates. msg文件,检查参数名是否为:air_speed,如下图所示。

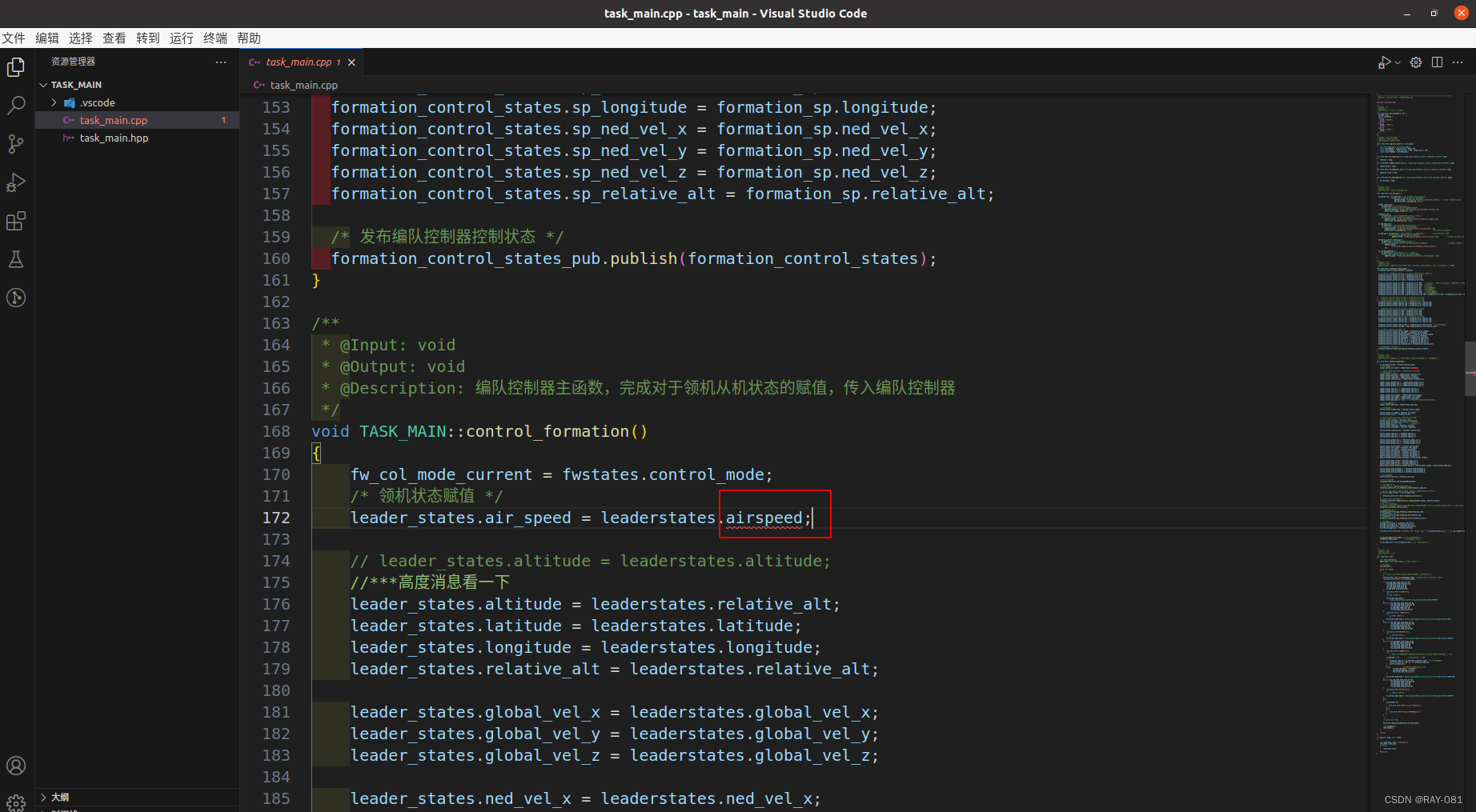
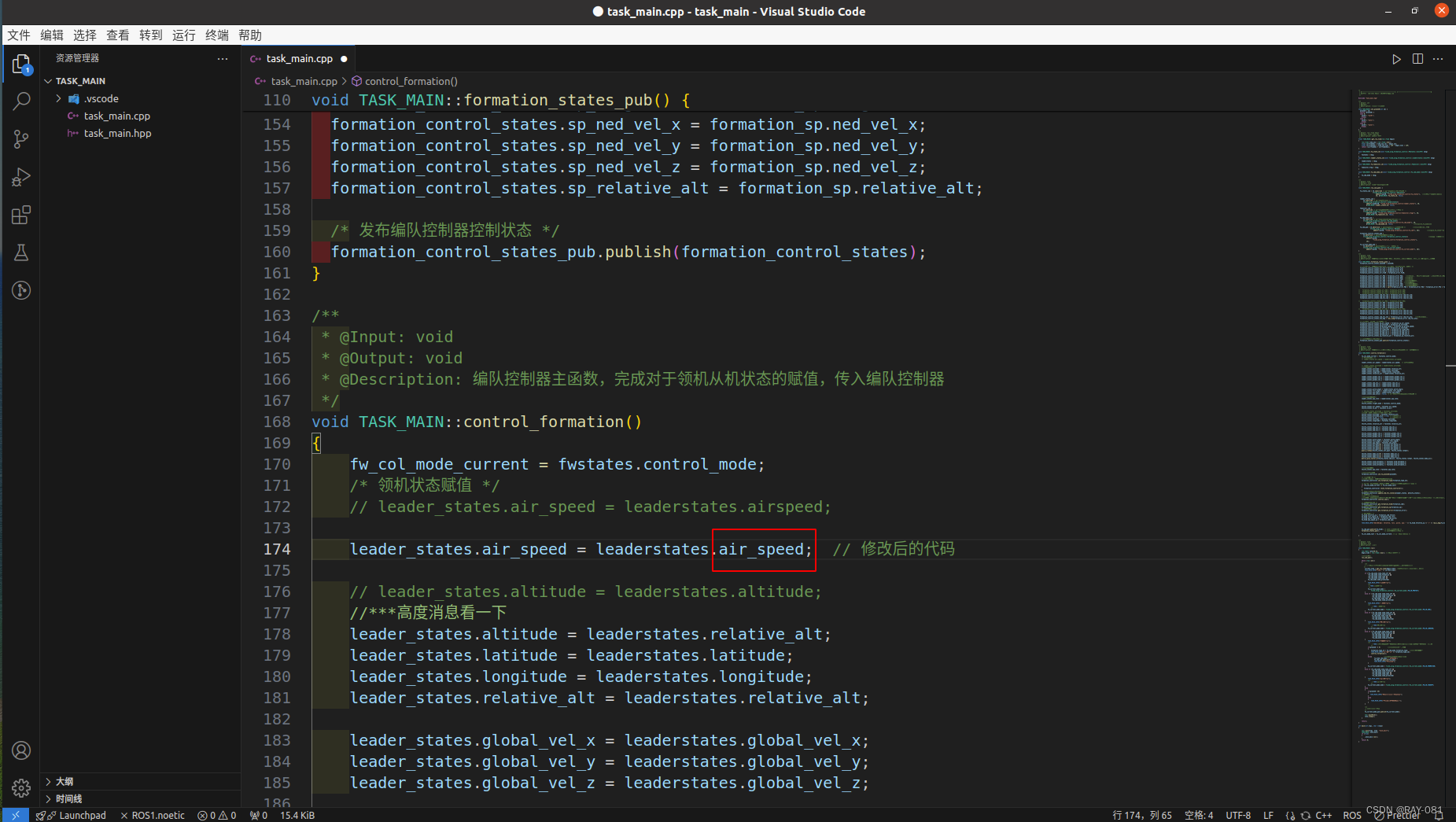
b.打开task_main.cpp文件,将173行的代码中的airspeed修改为air_speed,然后保存,如下面两张图所示。
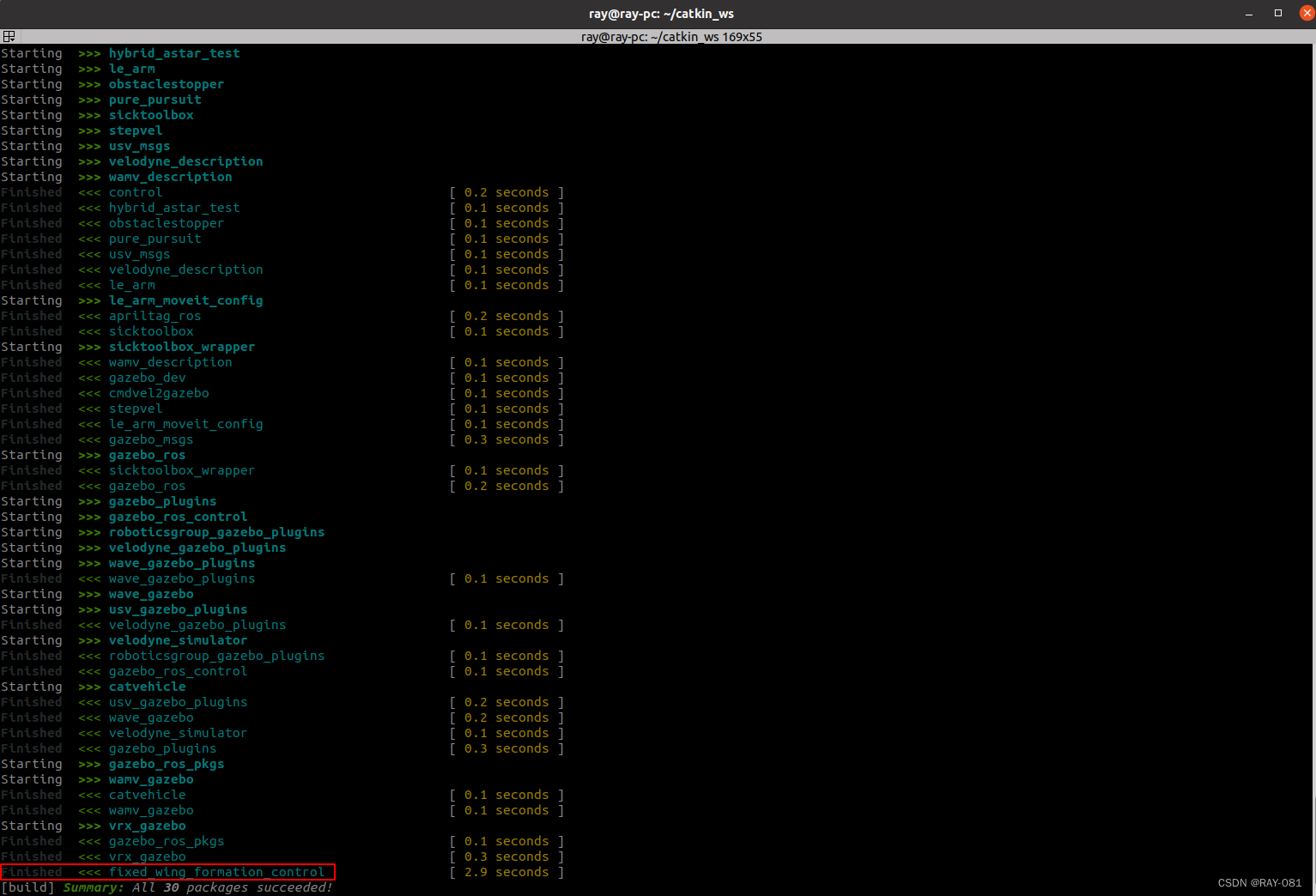
c.修改完成后再次编译
cd ~/catkin_ws
catkin build出现下图所示的情况,则说明编译成功。
2 启动仿真
2.1 借助bash文件一键启动
cd ~/catkin_ws/src/fixed_wing_formation_control/scripts/
bash multi_uav_sim_ba_3vtol.sh这个过程中可能出现如下报错:
2.1.1 报错1:
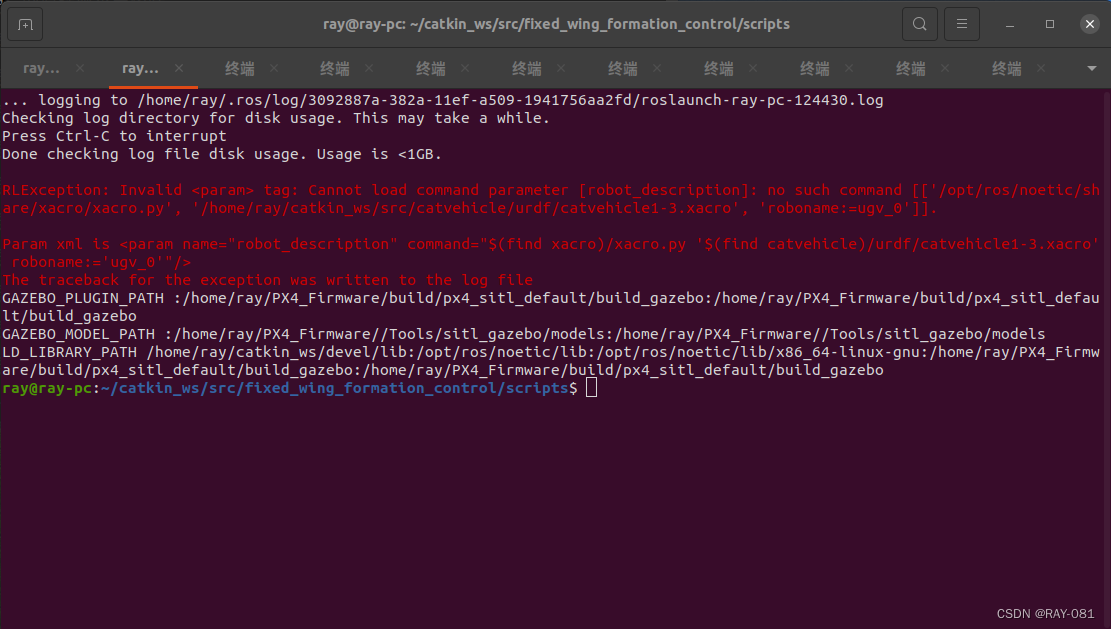
错因分析:
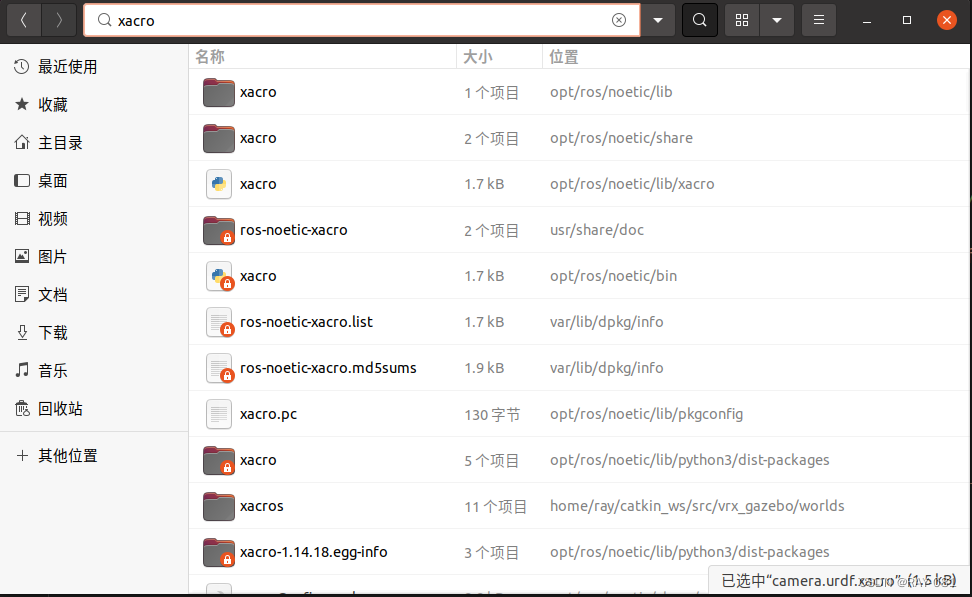
这个问题是由于ROS在Noetic版本中xacro包的路径有所变化导致的。launch文件中尝试使用xacro来生成URDF时,指定的路径不正确。Noetic版本中,xacro命令行工具的路径应该是/opt/ros/noetic/lib/xacro/xacro。
也就是说ROS neotic中/opt/ros/noetic/share/xacro下没有xacro.py 而是在opt/ros/noetic/lib/xacro/xacro中,如下两张图所示。

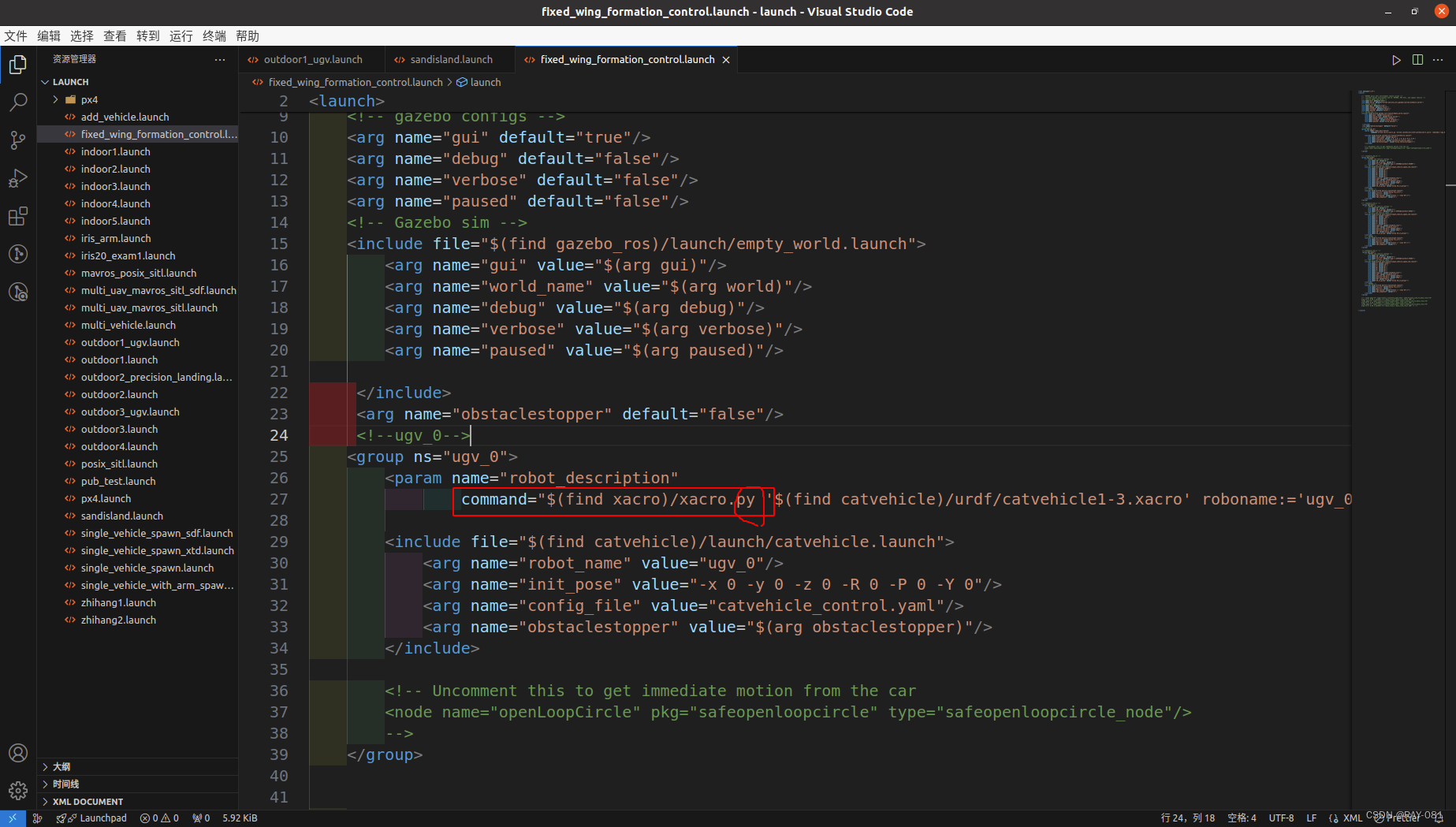
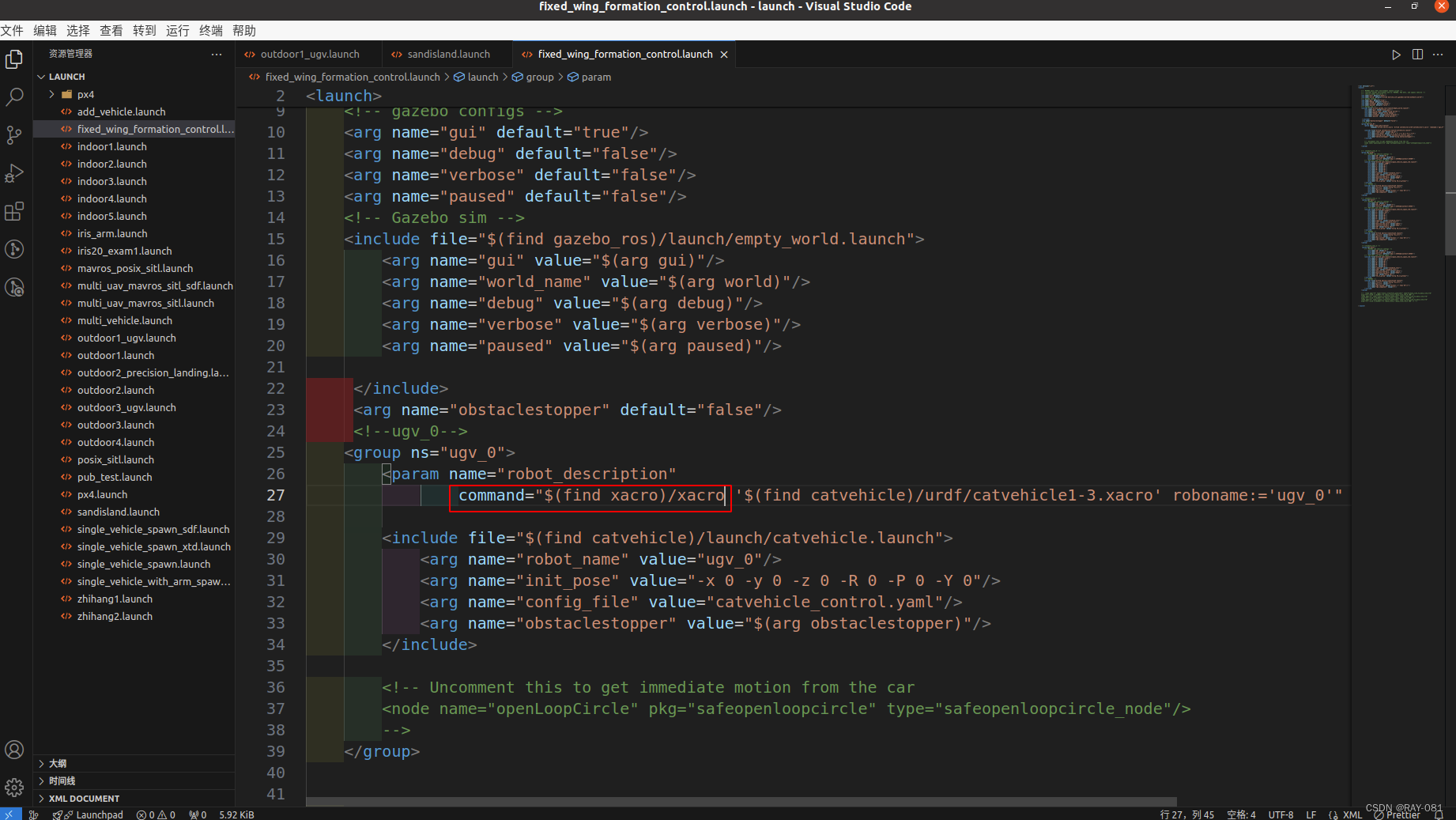
解决方法:
打开fixed_wing_formation_control.launch,将其中的xacro.py中的.py去掉后并保存,具体修改位置如下两图所示。文件路径:/home/ray/PX4_Firmware/launch
2.1.2 报错2
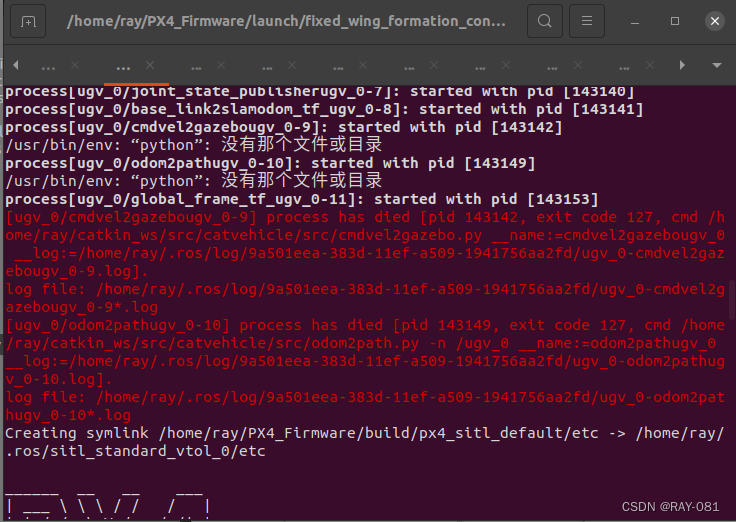
错因分析:#!/usr/bin/env python用的是pyhton2,而neotic用的是python3。
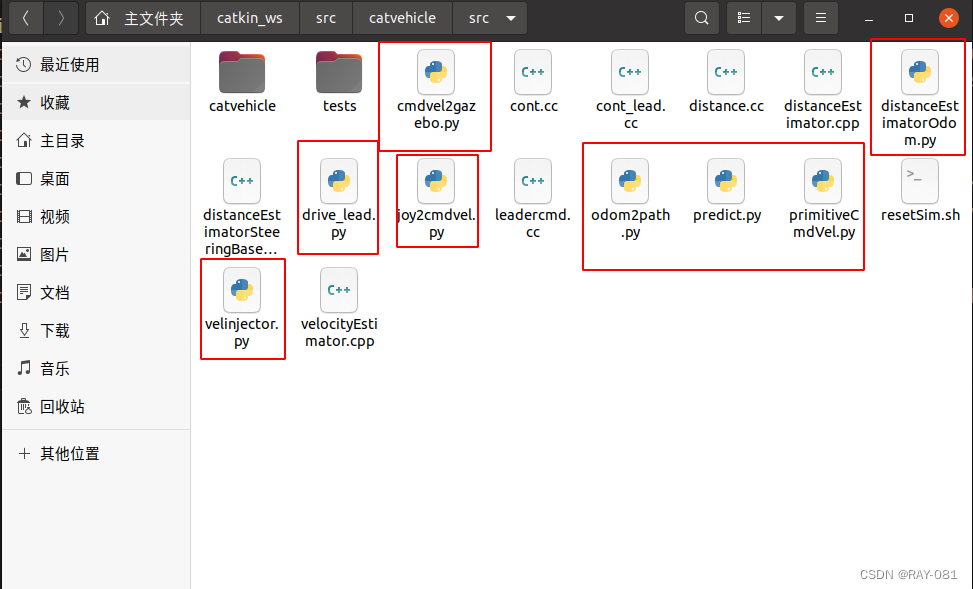
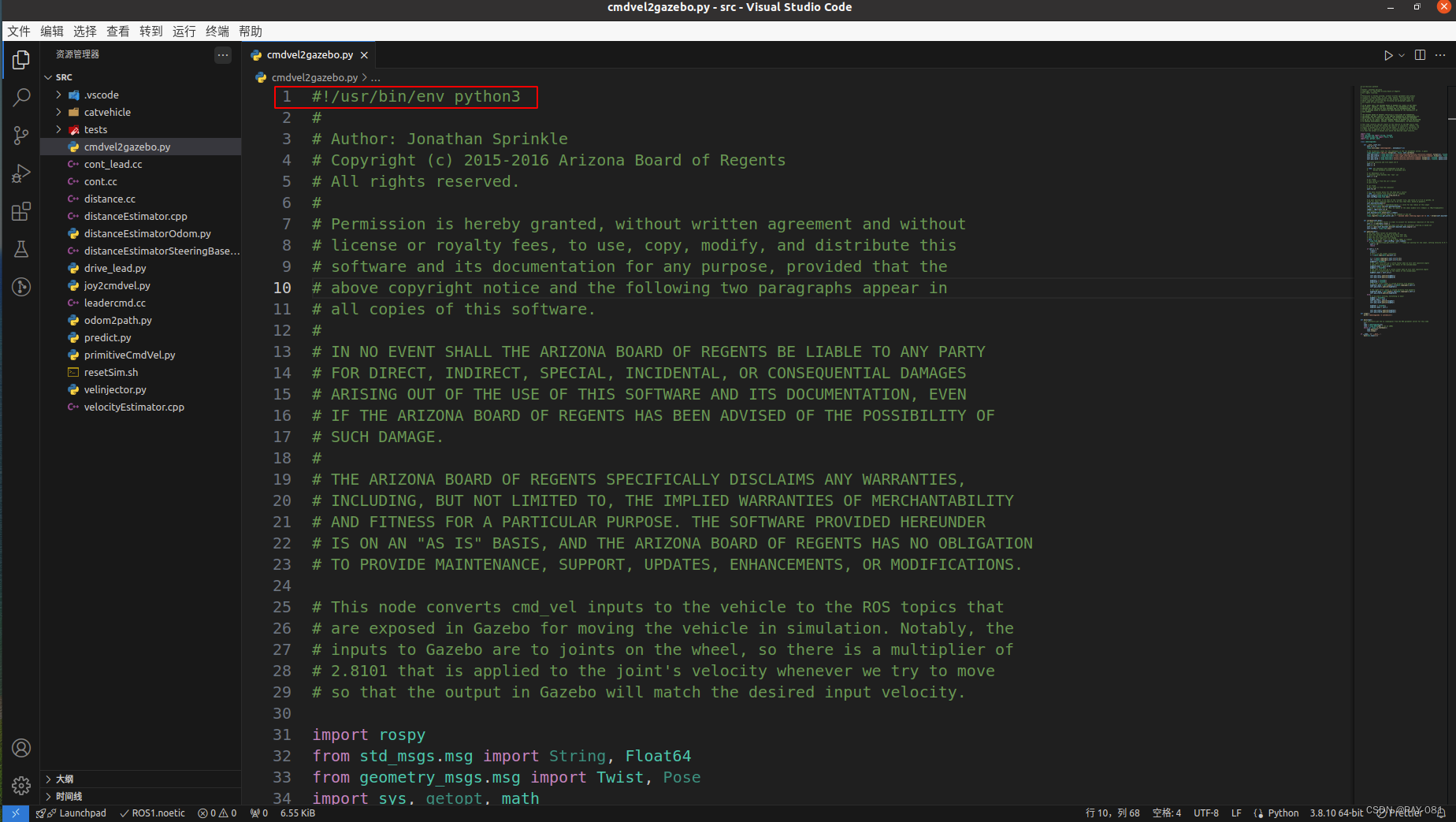
解决办法:将/home/ray/catkin_ws/src/catvehicle/src下的所有py文件中的#!/usr/bin/env python修改为#!/usr/bin/env python3并保存即可。如下列几张图所示。


2.1.3 报错3:
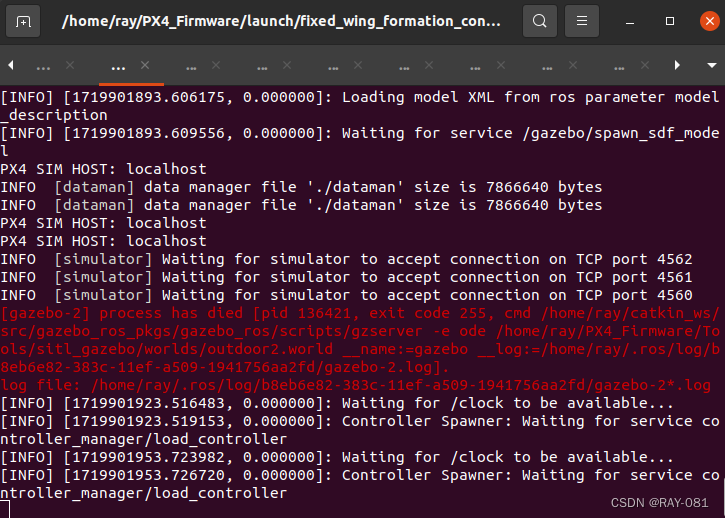
错因分析及解决方法:说明gazebo进程已经被占用,需要输入如下两条命令关闭之前的gazebo进程。
killall gzserver
killall gzclient 2.1.4 再次启动仿真:
cd ~/catkin_ws/src/fixed_wing_formation_control/scripts/
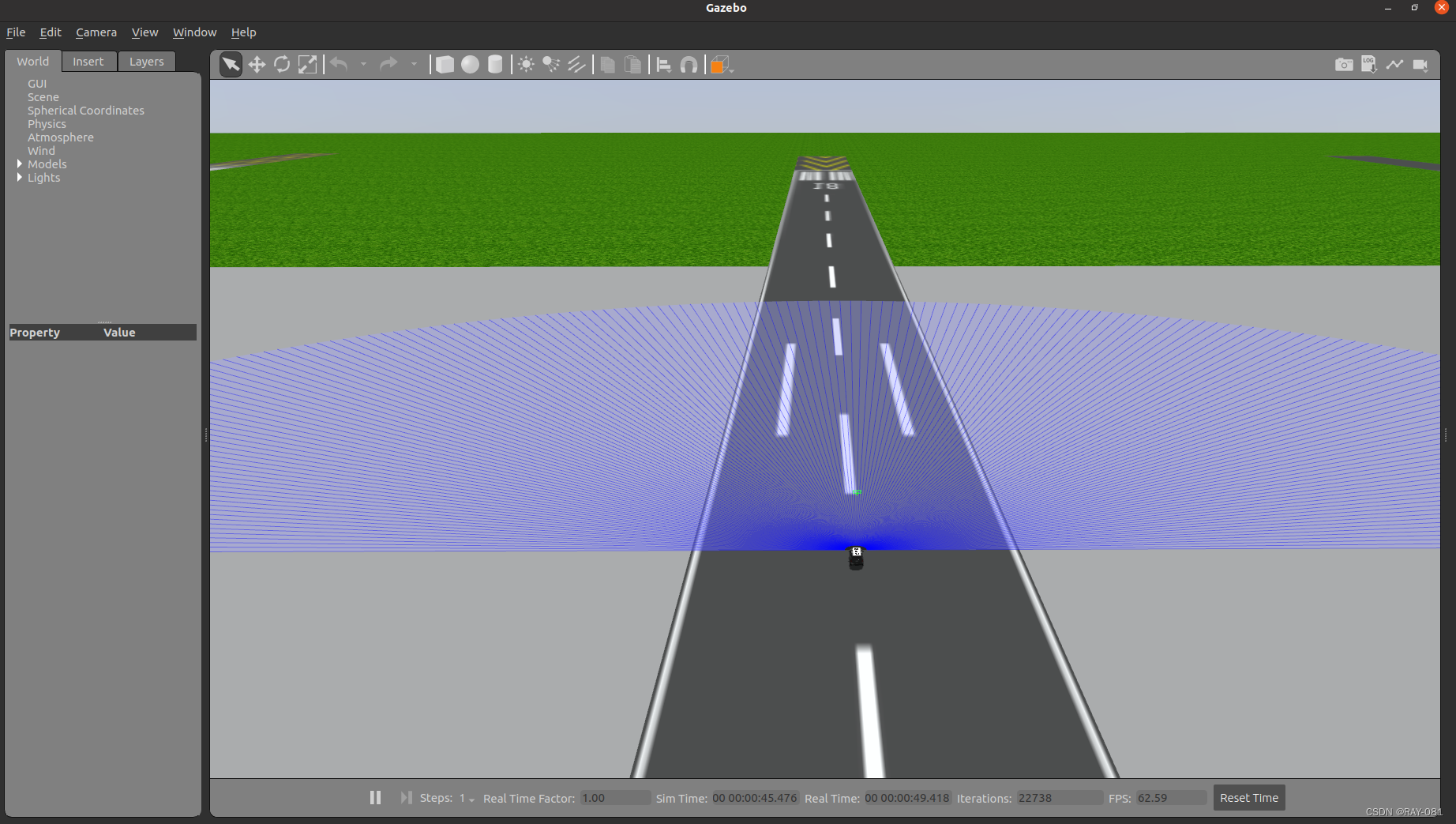
bash multi_uav_sim_ba_3vtol.sh正常启动后的效果如下图所示:
2.2 启动QGC地面站
进入你的QGC地面站的安装位置,然后在该文件在中打开终端,输入以下命令即可打开地面站。
./QGroundControl.AppImage如果进去的界面如下:
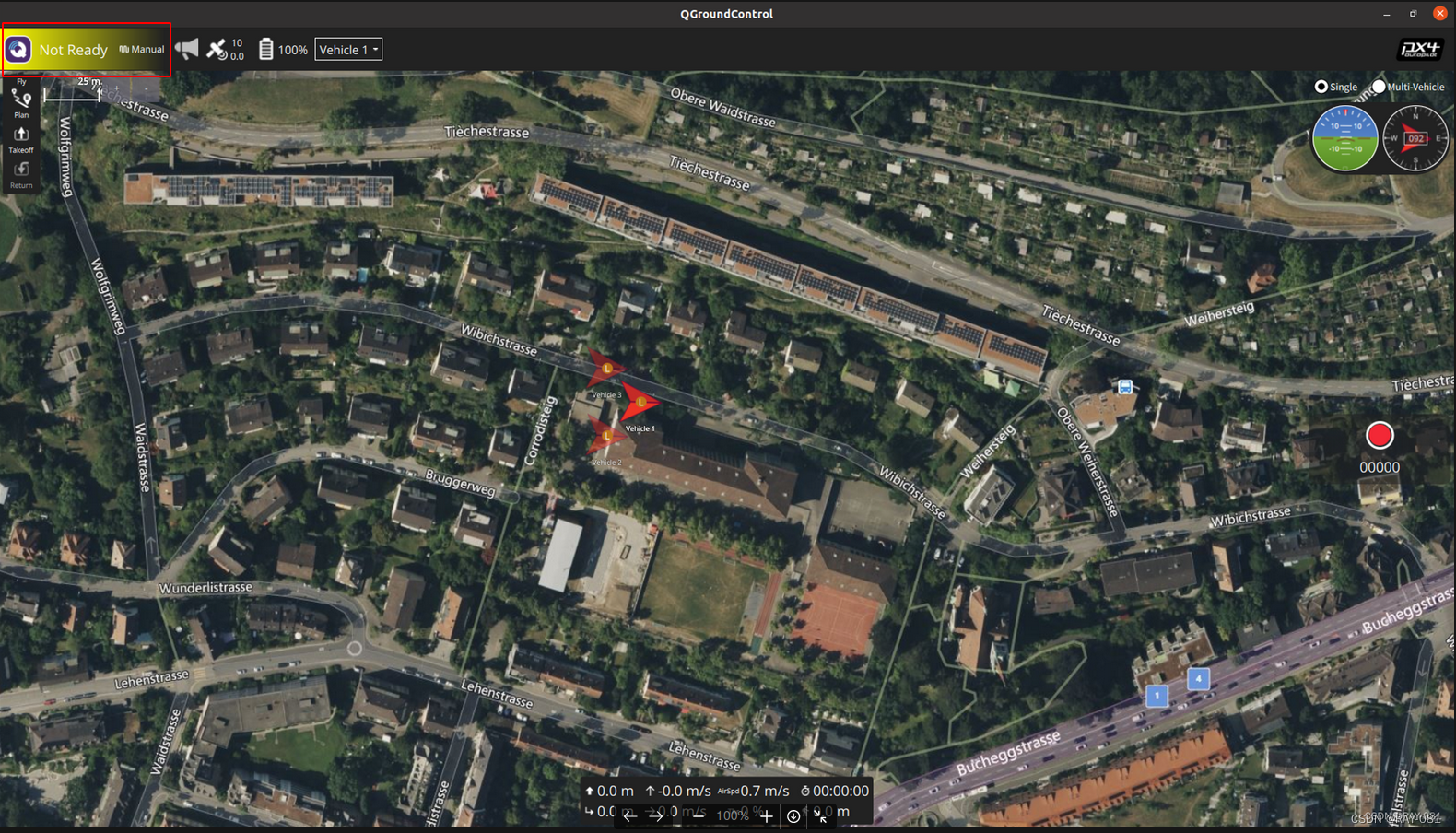
这可有能是你的rcS文件中的参数未正确设置,详见PX4飞控EKF配置 · 语雀 ,检查你的rcS文件的参数是否设置如下:
# GPS usedparam set EKF2_AID_MASK 1# Vision used and GPS denied#param set EKF2_AID_MASK 24# Barometer used for hight measurementparam set EKF2_HGT_MODE 0# Barometer denied and vision used for hight measurement#param set EKF2_HGT_MODE 3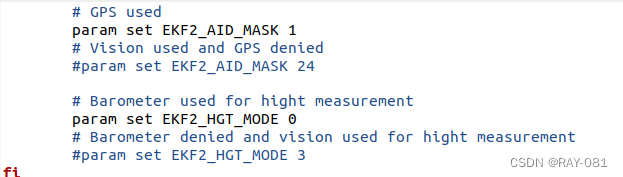
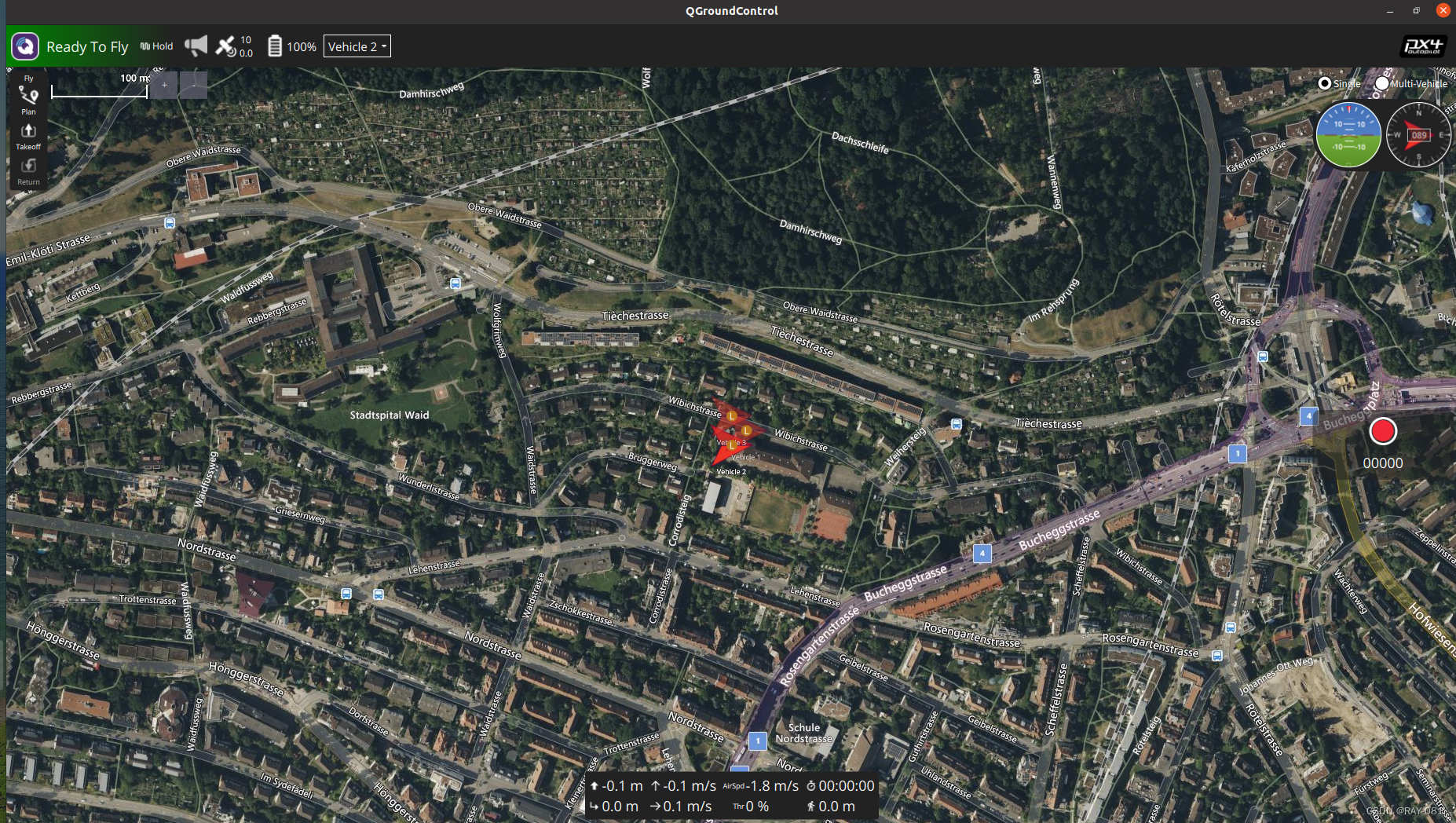
修改并保存后,再次重启gazebo仿真和QGC地面站。
正常打开后的界面如下:
2.3 借助QGC首先在旋翼模式下实现升空
备注:以下的每一步操作,每个无人机都需要进行。
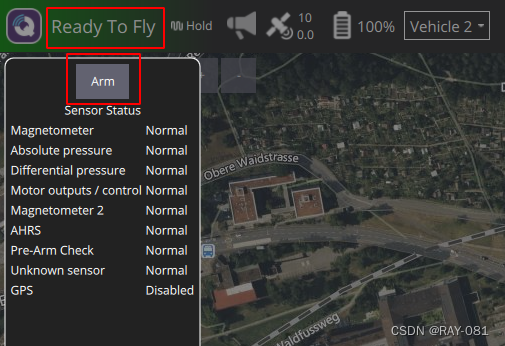
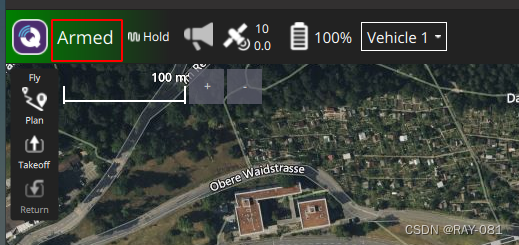
2.3.1 解锁
按照下列顺序的图片中红框位置依次点击或滑动来解锁无人机。
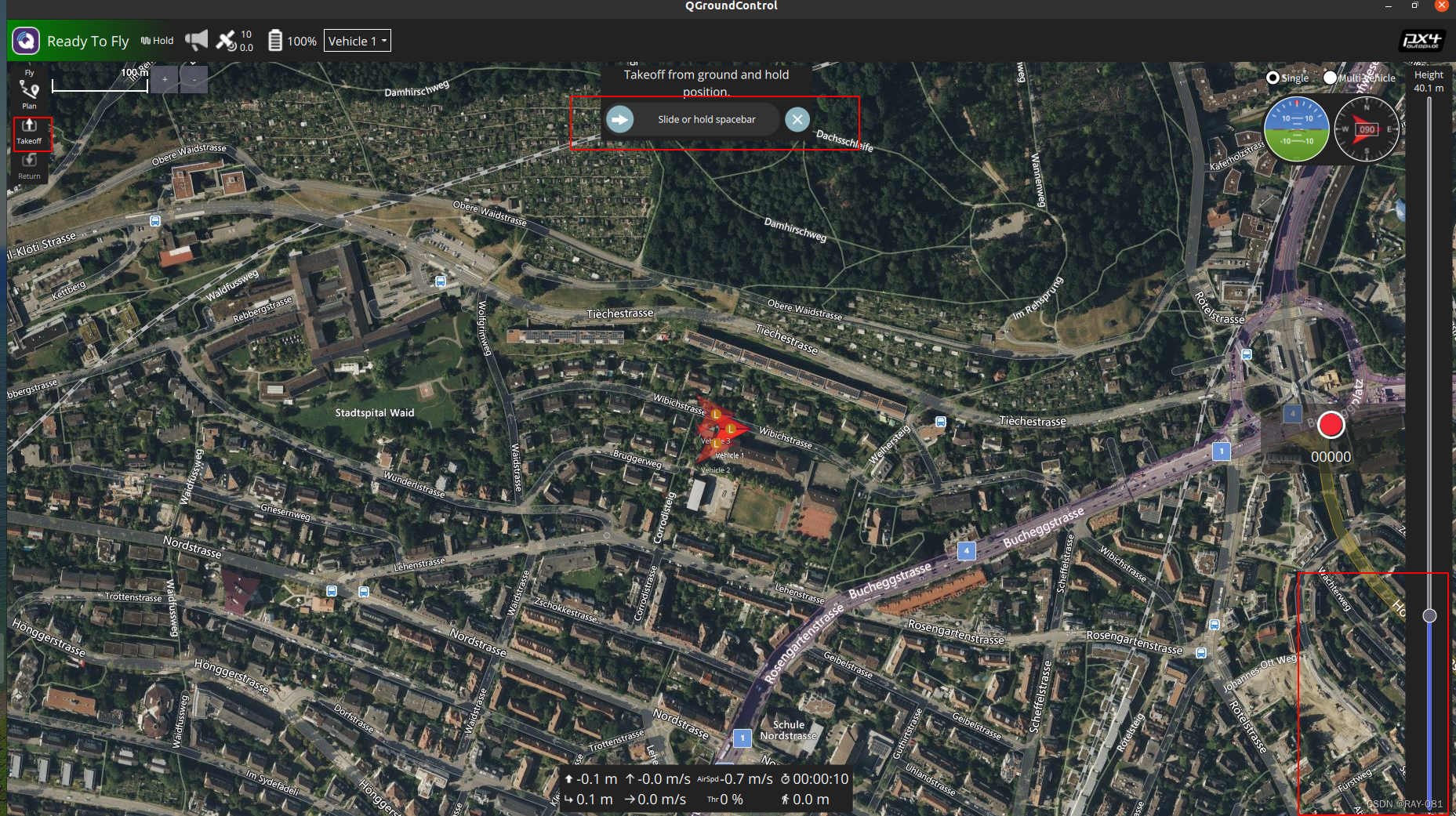
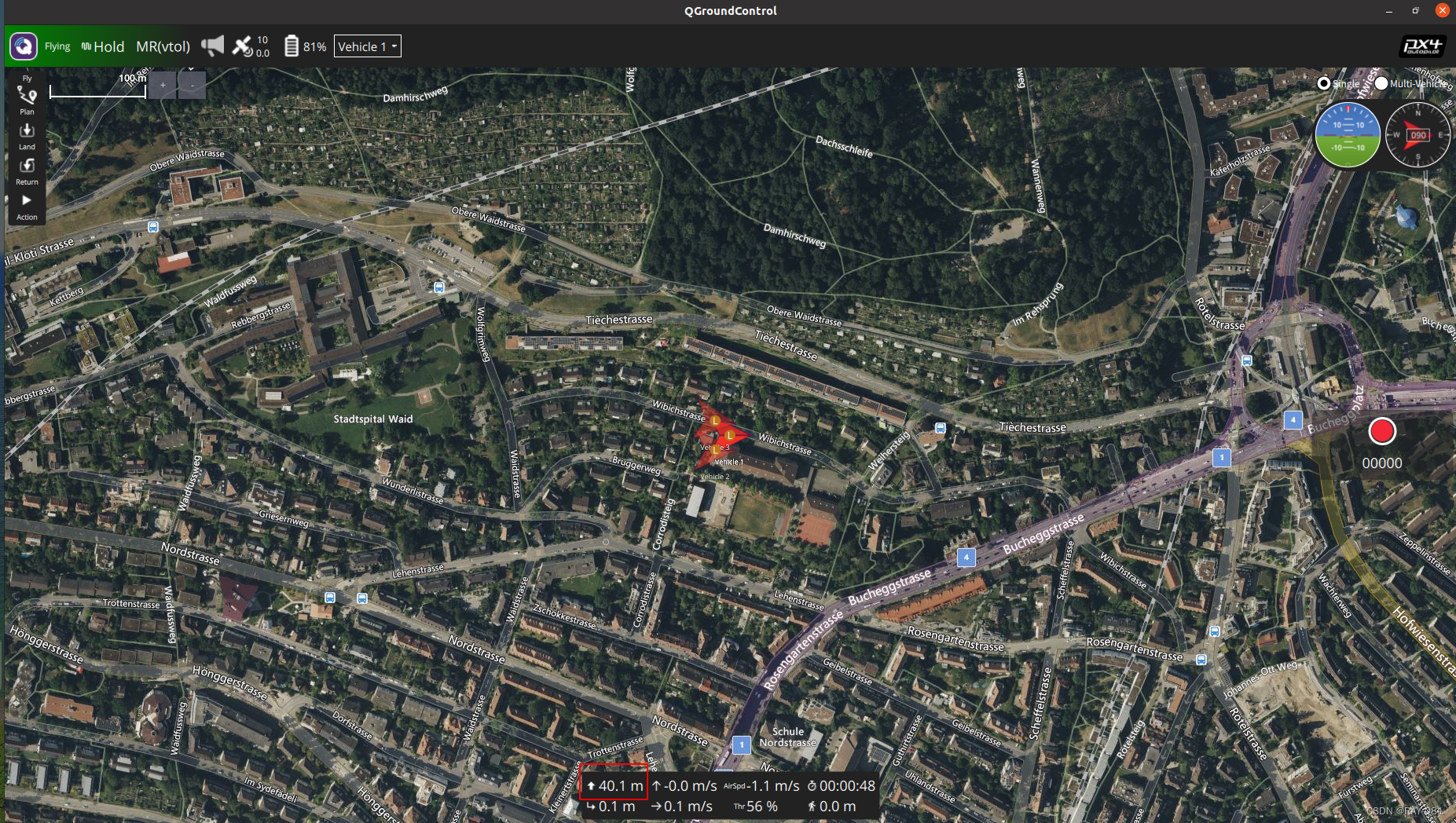
2.3.2 利用takeoff分别起飞各个无人机
按照下列顺序的图片中红框位置依次点击或滑动来起飞无人机。
2.3.3 达到预定起飞高度后,切换为固定翼模式
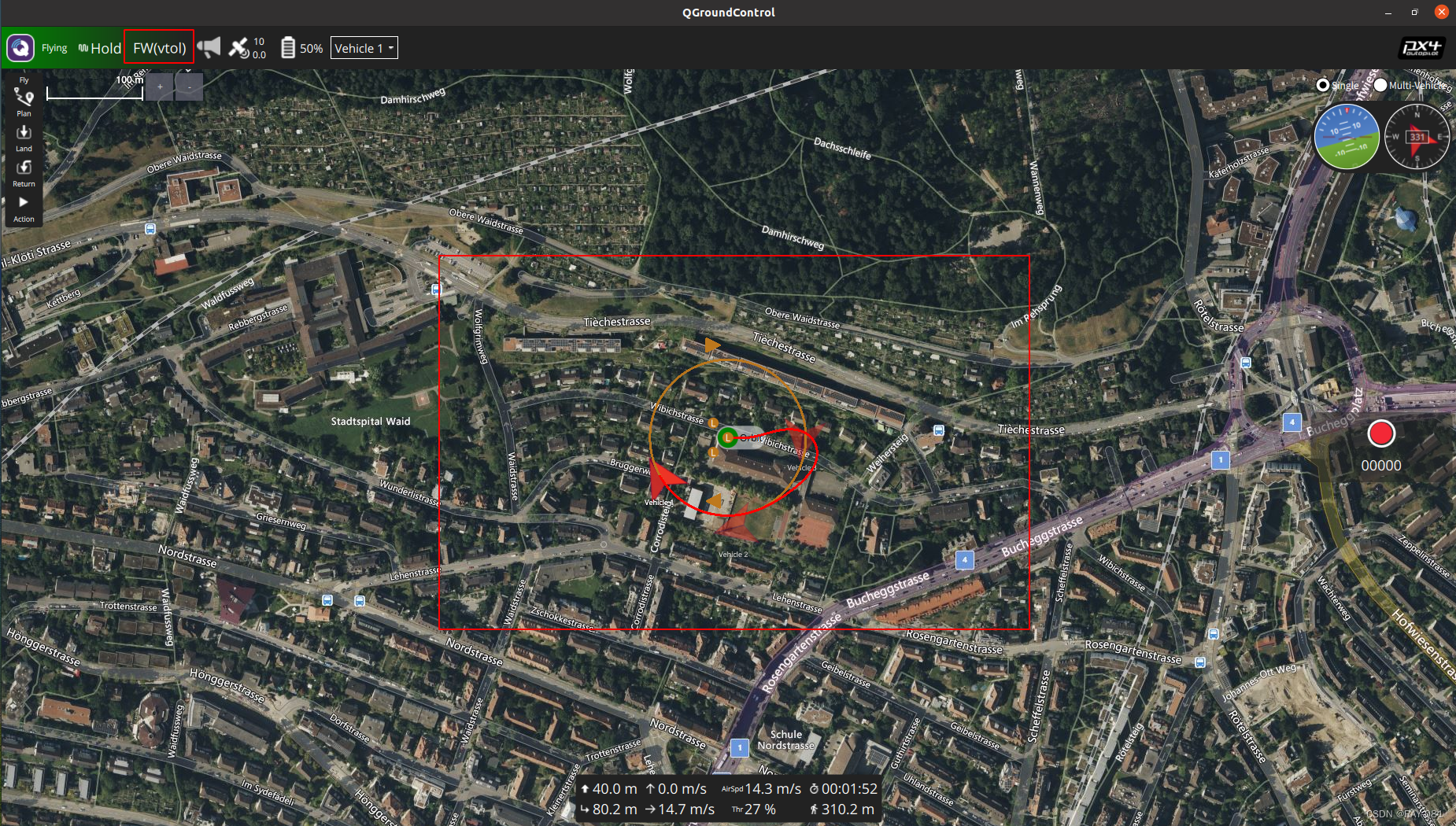
按照下列顺序的图片中红框位置依次点击来切换无人机模式。
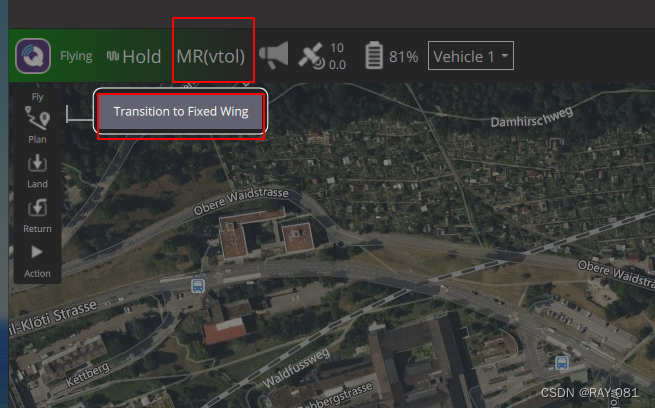
切换完成后,无人机开始盘旋,效果如下图所示。
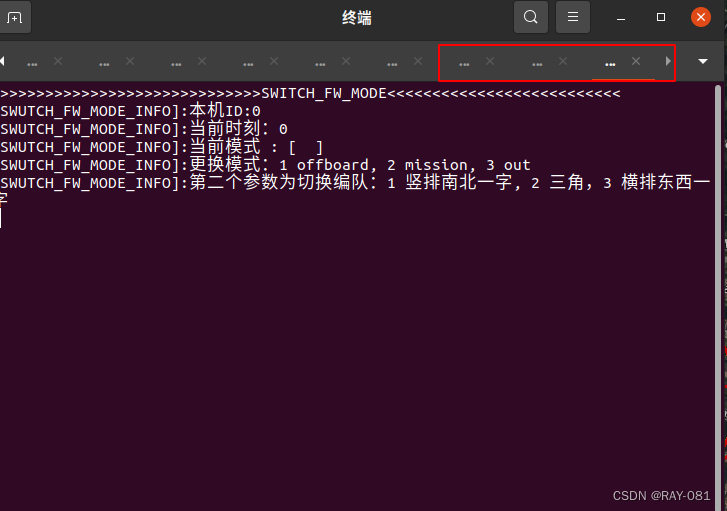
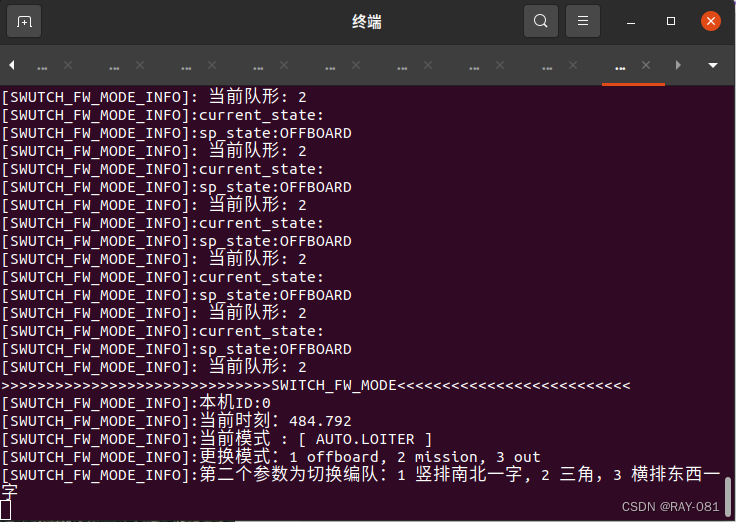
2.4 切换为offboard模式
在后三个窗口根据提示按数(数字间有空格)切换offboard模式并选择固定翼无人机编队队形,如果切换不成功可以尝试多切换几次。
输入示例:1 2 然后再按回车即可
但是,当0号机切换为offboard模式之后出现了如下报错,而后就自动降落了。
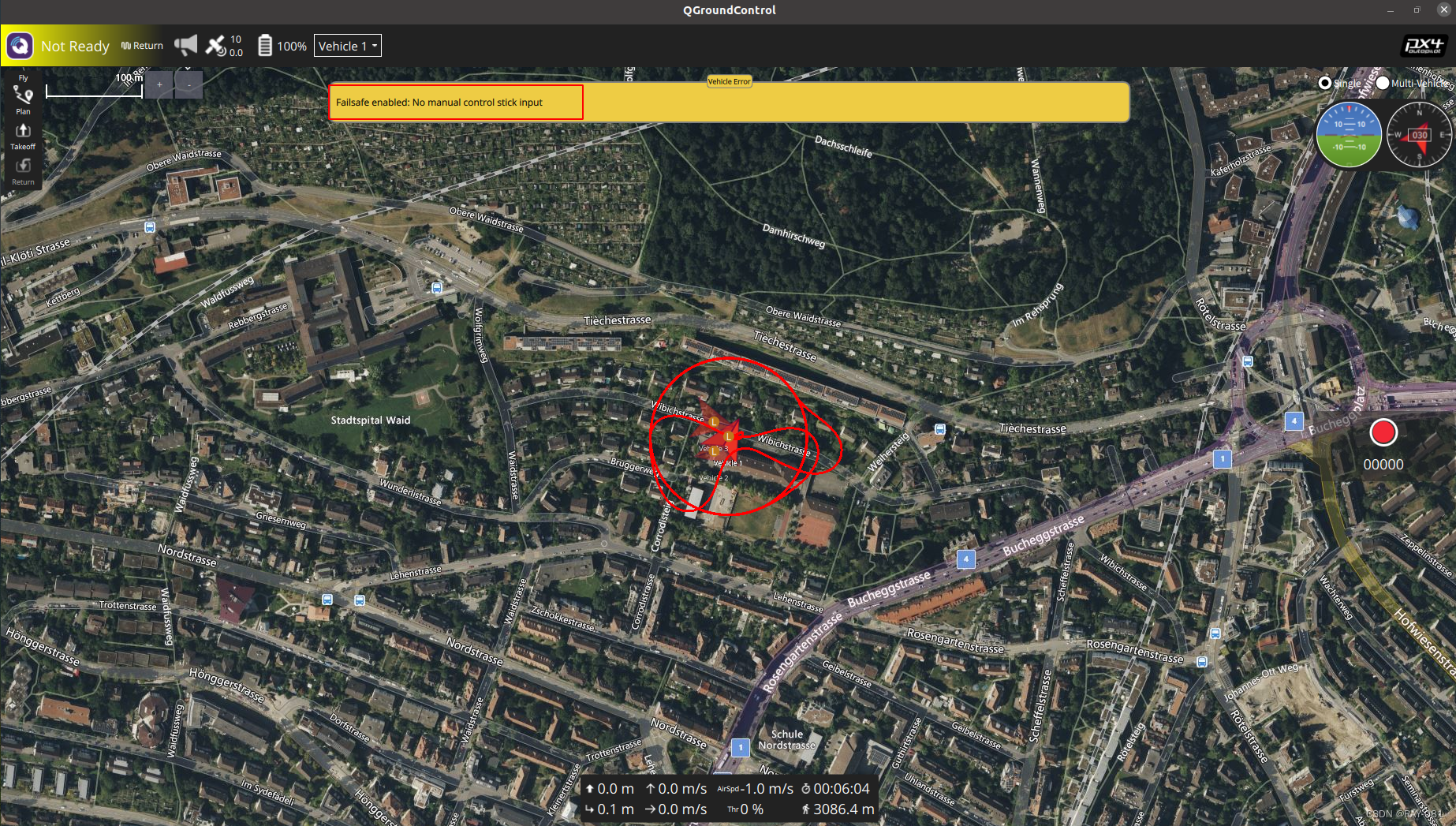
报错可能原因如下:
在QGroundControl (QGC) 地面站中,出现 "Failsafe enabled: No manual control stick input" 的提示意味着无人机进入了失效保护(Failsafe)模式,原因是未检测到手动控制杆的输入信号。这通常表示遥控器与无人机之间的通信中断,或者遥控器未发送控制信号。
至此,配置结束,剩下的教程可参考官方教程。
备注:目前“Failsafe enabled: No manual control stick input“这个问题还没有解决,后续解决后会及时更新,如果有会的大佬可以私信交流。
参考:固定翼无人机编队跟踪无人车 · 语雀
相关文章:
XTDrone-固定翼无人机编队跟踪无人车-配置教程
配置使用ROS版本为Neotic 1 配置 1.1 加载固定翼无人机编队跟踪控制工程文件 cp -r ~/XTDrone/coordination/fixed_wing_formation_control ~/catkin_ws/src 1.2 加载一些用到的功能包 sudo apt-get install ros-noetic-serial #根据自己的ROS版本修改 sudo apt-get insta…...

实现高性能、可扩展的实时数据采集系统:go-zero的应用与实践
随着互联网技术的高速发展,数据采集也越来越受到重视,成为企业获取商业价值的重要手段。在实际应用中,我们往往面临着数据量大、并发高、系统响应速度要求高、压力测试等挑战。如何实现高性能、可扩展的实时数据采集系统?本文将介…...
)
AUTOSAR NvM模块(五)
NvMRbCallbackSignatureAR45 改变回调函数的参数类型。 TRUE:根据AR44及之后版本,回调函数使用NvM_<Multi;Init>BlockRequestType参数类型。详细的函数调用参数请参考回调参数。 FALSE:根据AR43及之前版本,回调函数使用S…...

输出feign调用详细日志
开发新增一个feign调用类,调用另一个微服务的接口,总是报调用失败,想输出下调用的详细日志看看怎么回事。 第一步:查看feign的输出级别。 这个在qlm_config包里: /*** feign 日志记录级别* NONE:无日志记录…...

mac编译r2frida问题解决
在编译 https://github.com/nowsecure/r2frida 时报错: {"category": "error","code": 7006,"file": {"path": "/Users/xxx/Documents/Library/r2frida/src/agent/lib/info/index.ts","line": 494,&qu…...

中介者模式在金融业务中的应用及其框架实现
引言 中介者模式(Mediator Pattern)是一种行为设计模式,它通过引入一个中介对象来封装对象之间的交互,从而使对象不需要显式地相互引用,从而降低了对象之间的耦合性。在金融业务中,中介者模式常用于实现复…...

javaSE期末练习题
文章目录 前言一、程序控制1.顺序结构问题描述解题思路题解 2.选择结构2.1 题1问题描述解题思路题解 2.1 题2问题描述解题思路题解 3.循环结构3.1 阶乘的求取问题描述解题思路题解 3.2 水仙花数问题描述解题思路题解 二、数组三、类与对象1.类与对象1.1圆类问题描述解题思路题解…...

Linux文件数据写入
结构体 fd fd也就是文件描述符,用于标识已经打开的文件、管道、socket等。是进程和内核的桥梁,允许进程执行各种文件操作 struct fd {struct file *file;unsigned int flags; };file Linux内核中表示打开文件的结构体,包含了文件操作所需…...

vue2 中如何使用 vuedraggable 库实现拖拽功能
1.通过 npm 或 yarn 安装 vuedraggable 库 npm install vuedraggableyarn add vuedraggable 2. 引入组件内部使用,以下代码是一个Demo,可直接复制粘贴演示 注意:因项目使用了 vant,需要安装 vant 才能正常运行 <template&g…...

0基础学C++ | 第13天 | 基础知识 | 类 | 对象
目录 前言 封装 封装的意义 struct 和 class 的区别 成员属性设置为私有 前言 众所周知, C是一个面向对象的编程语言(面向对象的C语言的特点就是:封装、继、 多态),它与面向过程的C语言不通,对面向…...

Java | Leetcode Java题解之第212题单词搜索II
题目: 题解: class Solution {int[][] dirs {{1, 0}, {-1, 0}, {0, 1}, {0, -1}};public List<String> findWords(char[][] board, String[] words) {Trie trie new Trie();for (String word : words) {trie.insert(word);}Set<String> a…...

Flink面试题总结
一、简单介绍一下 Flink Apache Flink 是一个实时计算框架和分布式处理引擎,用于在无边界和有边界数据流上进行有状态的计算 二、Flink集群有哪些角色?各自有什么作用?(flink架构) --JobManager: JobManag…...

人工智能与云计算
项目要求 一个简单的集群。您需要在此项目中创建计算机集群。这些机器是 docker 容器。集群管理器是一个 Python 程序。群集的状态将写入文件。 希望通过这个 Python 文件,首先它能够通过获取输入来得到要创建的集群中包含的容器数量,并与用户进行交互(用户可以执行此集群…...

9.(vue3.x+vite)修改el-input,el-data-picker样式
效果预览 二:相关代码 <template><div style="padding: 50px"><el-input placeholder="请输入模型名称" style="width: 260px" /><br /...
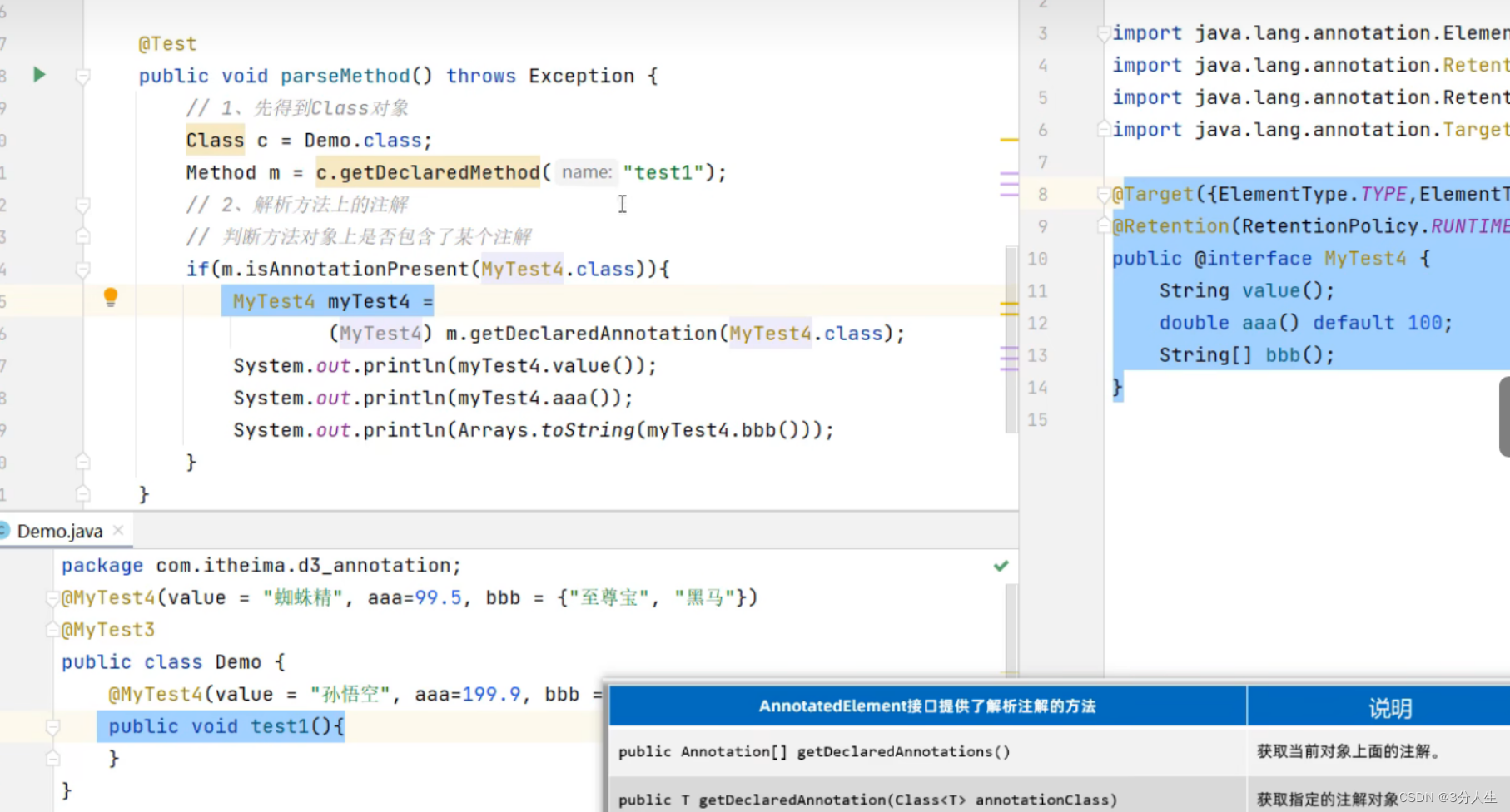
java反射和注解
反射 获取class对象的三种方法 ①:Class.forName("全类名"); ②:类名.class ③:对象.getclass(); 代码样例 package com.ithema;public class Main {public static void main(String[] args) throws ClassNotFoundException {//第…...

react_后台管理_项目
目录 1.运行项目 2. 项目结构 ①项目顶部导航栏 ②项目左侧导航栏 ③主页面-路由切换区 本项目使用的是 reacttsscss 技术栈。 1.运行项目 在当前页面顶部下载本项目,解压后使用编辑器打开,然后再终端输入命令: npm i 下载依赖后&am…...

【C语言】使用C语言编写并使用gcc编译动态链接库
【C语言】使用C 语言编写并使用 gcc 编译动态链接库 1.背景2.使用C编写代码3.使用gcc编译代码1.背景 在windows下开发很多程序接口被封装到动态链接库供其它开发者使用。 本博客使用C语言编写并使用gcc 编译 一个动态链接库文件FpdSys.dll; 然后使用C/C++/C#/Python去调用动态…...

使用supportFragmentManager管理多个fragment切换
android studio创建的项目就没有一个简单点的框架,生成的代码都是繁琐而复杂,并且不实用。 国内的页面一般都是TAB页面的比较多,老外更喜欢侧边菜单。 如果我们使用一个activity来创建程序,来用占位符管理多个fragment切换&…...

开源模型应用落地-FastAPI-助力模型交互-WebSocket篇(六)
一、前言 使用 FastAPI 可以帮助我们更简单高效地部署 AI 交互业务。FastAPI 提供了快速构建 API 的能力,开发者可以轻松地定义模型需要的输入和输出格式,并编写好相应的业务逻辑。 FastAPI 的异步高性能架构,可以有效支持大量并发的预测请求,为用户提供流畅的交互体验。此外,F…...
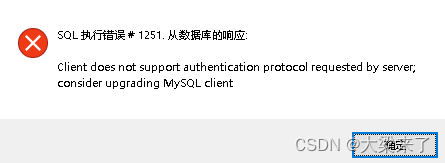
独立开发者系列(17)——MYSQL的常见异常整理
虽然安装MYSQL到本地很简单,但是数据库报错还是经常出现,这个时候,需要我们进行逐步检查与修复。作为我们最常用的开发软件,无论切换php/go/python/node/java,数据库的身影都少不了,对于我们储存数据而言&a…...

Lingoose框架实战:构建智能客服工单处理AI工作流
1. 项目概述:从“Lingo”到“Goose”,一个AI应用编排框架的诞生如果你最近在折腾大语言模型应用,尤其是想把OpenAI、Anthropic这些API的能力整合到自己的业务流程里,那你大概率已经体会过那种“胶水代码”的烦恼了。今天要聊的这个…...

从零构建Go Web框架:解析the0极简框架的设计原理与实现
1. 项目概述:一个极简主义Web框架的诞生在Web开发的世界里,我们常常面临一个选择:是拥抱功能齐全但略显臃肿的“巨无霸”框架,还是追求极致轻量与灵活的自定义方案?对于许多追求性能、热爱掌控感,或是需要构…...

Kubernetes上Jenkins全栈部署:动态Agent与生产环境调优指南
1. 项目概述:一个面向Kubernetes的Jenkins全栈部署方案在容器化和云原生技术成为主流的今天,如何高效、稳定地部署和管理持续集成/持续交付(CI/CD)流水线,是每个开发团队和运维工程师必须面对的课题。传统的单体Jenkin…...

ESP32-S2 Reverse TFT Feather开发板深度解析:从核心硬件到物联网项目实战
1. 项目概述:为什么选择ESP32-S2 Reverse TFT Feather?如果你正在寻找一款能让你快速搭建物联网设备原型,尤其是那些需要一块漂亮屏幕来交互或显示信息的项目,那么ESP32-S2 Reverse TFT Feather绝对是一个值得你花时间研究的开发板…...

Docker Compose编排微服务
Docker Compose编排微服务 引言 Docker Compose是Docker官方提供的容器编排工具,用于定义和运行多容器Docker应用。通过Compose,可以使用YAML文件定义服务、网络、数据卷等资源,然后通过简单的命令启动和停止整个应用。Docker Compose特别适合…...

MATLAB/Simulink模型化设计驱动树莓派:从LED闪烁到快速原型开发
1. 项目概述:当MATLAB/Simulink遇见树莓派 如果你是一名算法工程师、控制工程师,或者正在学习嵌入式系统,那么“模型化设计”和“快速原型开发”这两个词对你来说一定不陌生。它们听起来很高大上,但核心目标其实很朴素࿱…...

基于Claude API构建可编程AI智能体:从对话到自动化生产单元
1. 项目概述:从Claude中“招聘”一个AI伙伴最近在GitHub上看到一个挺有意思的项目,叫“hire-from-claude”。初看这个标题,你可能会有点摸不着头脑:Claude不是Anthropic公司开发的那个AI助手吗?怎么还能从它那里“招聘…...

ARM Jazelle技术:硬件加速Java字节码执行详解
1. ARM Jazelle技术概述Jazelle技术是ARM架构中用于硬件加速Java字节码执行的关键扩展,最早出现在ARMv5TE架构中。这项技术通过在处理器内部集成Java字节码执行单元,实现了Java虚拟机(JVM)功能的硬件化。与传统的软件解释器相比,Jazelle能够将…...

PyTorch:torch.nonzero——从稀疏数据到精准索引的实战指南
1. 为什么你需要掌握torch.nonzero? 在处理数据时,我们经常会遇到这样的情况:一个大型张量中只有少数几个值是我们真正关心的。想象一下你在分析一张医学影像,可能只有几个像素点显示异常;或者在自然语言处理中&#x…...

OpenAI GPT Image 2文字准确率95%,企业视觉硬核生产力4大核心升级与商业落地路径
GPT Image 2的4大核心升级能力1. 文字渲染准确率接近95%,多语言直出即用过去用AI生图,最头疼的就是文字。写个中文标题,十次有八次是乱码,英文稍微长一点也会出错。而GPT Image 2的文字渲染准确率做到了接近95%,支持中…...