C#之Delta并联机械手的视觉同步分拣
本文导读
前面两节课程我们介绍了怎么建立Delta并联机械手的正逆解以及如何通过视觉进行匹配定位。本节课程给大家分享如何通过C#语言开发正运动Delta并联机械手传送带同步的视觉分拣。
VPLC711硬件介绍
VPLC711是正运动推出的一款基于x86平台和Windows操作系统的高性能机器视觉EtherCAT运动控制器,具备强大的运算能力和灵活性。它具有出色的实时性能和多路高速硬件输入与多路高速PSO输出,能够精准控制多轴同步运动,并与外部设备实现多协议的高速通信。

VPLC711支持多种硬件接口和通信协议,方便与其他设备的连接和集成。除此之外,VPLC711还具备视觉处理功能,能够实时处理图像数据,实现视觉检测、测量和定位等应用。

VPLC711内置Windows运动控制实时内核MotionRT7,形成一种开放式IPC形态实时软控制器/软PLC,为用户提供灵活集成的运动控制+视觉一体化解决方案。

VPLC711硬件参数
1.采用x86高性能CPU,EtherCAT可支持1ms 64轴同步运行;
2.板载RS232,RS485,EtherNet5,EtherCAT,USB3.04硬件接口;
3.板载20DI,其中4个高速色标锁存,2组高速单端编码器;
4.板载20DO,其中4个高速单端脉冲轴,4组高速PWM;
5.支持DVI-D,HDMI显示,支持双网口不同IP设置。
想要了解更多关于VPLC711的详情介绍,可以点击“x86平台实时Windows机器视觉EtherCAT运动控制器VPLC711”查看。
一、C#语言进行Delta并联机械手的开发之运动库和视觉库的添加
1.在VS2010菜单“文件”→“新建”→“项目”,启动创建项目向导。

2.选择开发语言为“Visual C#”和.NET Framework 4以及Windows窗体应用程序。

3.找到厂家提供的光盘资料里面的C#函数库,路径如下(32位库为例)。
1)进入厂商提供的光盘资料找到“04PC函数”文件夹,并点击进入。

2)选择“函数库2.1”文件夹。

3)选择“Windows平台”文件夹。

4)根据需要选择对应的函数库,这里选择32位库。

5)解压C#压缩包,里面有C#对应的函数库。

6)函数库具体路径如下。

4.将厂商提供的C#库文件以及相关文件复制到新建的项目中(注意这里面的PC函数库默认提供的是运动库,如果使用视觉功能还需要获取视觉库,视觉库可以找厂商的相关销售或技术人员获取)。
1)将Zmcaux.cs(运动库)和Zvision.cs(视觉库)文件复制到新建的项目里面中。

2)将zauxdll.dll、zmotion.dll和zvision.dll文件放入bin\debug文件夹中。

5.用vs打开新建的项目文件,在右边的解决方案资源管理器中点击显示所有文件,然后鼠标右击Zmcaux.cs与 Zvision.cs文件,点击包括在项目中。

6.双击Form1.cs里面的Form1,出现代码编辑界面,在文件开头写入using cszmcaux,using ZVision并声明控制器句柄g_handle。

二、PC函数介绍
1.链接控制器,获取链接句柄。

2.皮带同步指令。

三、Basic脚本快速验证指令用法
1.编写Basic测试脚本进行MoveSync指令的用法测试。
'**************************************************************************************
'背景:假设有一对对射型的光电传感器固定在流水线的两端,来实时检测流水线上的产品到位情况
'MOVESYNC指令参数填写说明:
'syncposition:物体到感应点时皮带轴的位置,需要通过编码器锁存把产品的对应位置记录下来。
'pos1:跟随轴1原点到光电传感器感应点的位置,对于每个产品都是固定的。
'**************************************************************************************
GLOBAL CONST BeltAxis=4 '皮带轴是轴4
GLOBAL CONST FollowAxis1=0 '跟随轴1是轴0
GLOBAL CONST InducPos1=30 '跟随轴1原点到光电传感器感应点的位置
GLOBAL CONST StandbyPos1=50'跟随轴1的待机位
GLOBAL CONST EmptyPos1=400 '跟随轴1的放料位
'停止所有轴
RAPIDSTOP(2)
WAIT IDLE
'初始化相关轴的轴参数
BASE(FollowAxis1, BeltAxis)
ATYPE = 1,1
UNITS = 1000,1000
SPEED = 50,100
DPOS = 0,0
'触发示波器采集波形
TRIGGER
DELAY(1000)
'跟随轴先运动到待机位
BASE(FollowAxis1)
MOVEABS(StandbyPos1)
'皮带轴开始运动
VMOVE(1) AXIS(BeltAxis)
'假设皮带运动到200的位置时,有一个产品被检测到
BASE(FollowAxis1)
Wait UNTIL MPOS(BeltAxis)> 200
MOVESYNC(0, 2000, 200, BeltAxis, InducPos1) '跟随轴加速同步段该指令执行完后将同步上产品
MOVE_OP(0, ON) '同步上后打开真空吸
MOVESYNC(0, 1000, 200, BeltAxis, InducPos1) '继续同步1s
MOVESYNC(-1, 0, 0, -1, EmptyPos1) '走到放料位置
MOVE_OP(0, OFF) '到放料位后关闭真空吸
2.通过RTSys软件的示波器观察波形,分析同步过程。


根据示波器的数据分析
1、产品刚刚被检测到时,皮带的位置是200,跟随轴的位置是50。
2、跟随轴追上产品,并保持速度和皮带轴同步时皮带的位置是400,跟随轴1的位置是230。
3、由1和2可知,产品在同步过程中前进了200(400-200)。
4、因为跟随轴1原点到光电传感器感应点的位置InducPos1我们给的数据是30,所以在跟随轴1和皮带平行的情况下,皮带带着产品往前跑了200后,此时此刻跟随轴1原点到光产品的实际距离是230(200+30)。
5、那么第4点计算的结果和第2的同步完成后跟随轴1的实际位置是一致的,所以流水线同步指令测试正常。
四、C#例程建设之视觉流水线同步分拣
1.皮带同步指令关键参数详细介绍。
ZAux_Direct_MoveSync(ZMC_HANDLE handle,float imode,int synctime,float syncposition,int syncaxis,int imaxaxises,int *piAxislist,float *pfDisancelist).
(1)参数imode:
imode = 0+angle,表示同步模式,如果皮带和X轴平行,填0即可。
imode = -1,表示结束同步模式,可运动到指定的绝对位置,一般同步上抓取完物料后运动到放料位使用。
(2)参数synctime: 同步时间,ms单位.运动在指定时间内完成,完成时轴跟皮带轴上物体保持速度一致。0表示根据运动轴的速度加速度来估计同步时间。
(3)参数syncposition: 视觉或传感器识别到皮带是的产品时,皮带此时此刻的位置信息MPOS。
(4)参数pfDisancelist:如果是视觉定位产品时,这个参数直接填视觉识别到产品时产品的世界坐标。
如果用光电传感器检测产品时,这个参数是固定的,在传感器刚刚好感应到产品时,产品当前位置的绝对坐标。可以在此时此刻手动运动从轴来定位到产品处来获取位置信息。
2.视觉流水线同步分拣流程图。

(1)视觉匹配定位代码详情。
```csharp
/************************************************************************************
'任务编号: 无
'函数功能: 视觉定位产品
'Input: 无
'Output: 无
'返回值: 子线程---进行视觉定位
**************************************************************************************/
public void RunSubTaskVisua()
{int TempArrid = 0;float TempVar = 0;WriteLog("视觉功能正常启动");while (SysRunFlag > 0){//暂停按钮没有按下时while (SysRunFlag == 1) {//采集图像VisuaOper.CameAcquisition();//进行模板匹配RTDisplay.Image = VisuaOper.ShapeFind();if (MainWindows.BeltMpos != 0)//如果采集照片的时候皮带编码器位置获取正常{//操作MoveSyncBuff数据先加锁while (true){if (MainWindows.SetMoveSyncFlag == 0){MainWindows.SetMoveSyncFlag = 1;break;}}//找到可以存储数据的数组起始下标int ArrId = 0;for (int i = 0; i < 50; i++){if (MainWindows.MoveSyncBuff[i, 0] == 0){ArrId = i;break;}}//开始存储数据 一次匹配最多10个结果TempArrid = ArrId;for (int i = 0; i < 10; i++){//如果分数满足要求if (MainWindows.VisionRst[i, 0] >= MainWindows.VisionScore){int j;//如果有重复的目标需要剔除for (j = 0; j < TempArrid; j++){TempVar = MainWindows.VisionRst[i, 1] - MainWindows.BeltMpos - MainWindows.MoveSyncBuff[j, 1] + MainWindows.MoveSyncBuff[j, 4];if (((TempVar) <= 10) && (TempVar >= -10)){j = -10;break;}}if (j >= 0){MainWindows.MoveSyncBuff[ArrId, 0] = 1;MainWindows.MoveSyncBuff[ArrId, 1] = MainWindows.VisionRst[i, 1]; //存储匹配结果的X坐标MainWindows.MoveSyncBuff[ArrId, 2] = MainWindows.VisionRst[i, 2]; //存储匹配结果的Y坐标MainWindows.MoveSyncBuff[ArrId, 3] = MainWindows.VisionRst[i, 3]; //存储匹配结果的角度偏移MainWindows.MoveSyncBuff[ArrId, 4] = MainWindows.BeltMpos; //存储匹配到产品时,传送带的位置信息ArrId = ArrId + 1;IdentiNum.Text = (Convert.ToInt32(IdentiNum.Text) + 1).ToString();WriteLog("视觉目标:" + "(" + MainWindows.VisionRst[i, 1].ToString("0,0") + "," + MainWindows.VisionRst[i, 2].ToString("0,0") + ")");}}//分数清空MainWindows.VisionRst[i, 0] = 0;}//解锁MainWindows.SetMoveSyncFlag = 0;}}Thread.Sleep(100);}
}
(2)流水线同步分拣代码详情。
/************************************************************************************
'任务编号: 无
'函数功能: 流水线同步分拣
'Input: 无
'Output: 无
'返回值: 无
**************************************************************************************/
public void RunSubTaskMotion()
{float[] MoveSyncTemp = new float[5];float TempMpos = 0;while (SysRunFlag > 0){while (SysRunFlag == 1){if (MainWindows.MoveSyncBuff[0, 0] == 1){MainWindows.ZauxErr = zmcaux.ZAux_Direct_GetMpos(MainWindows.g_Handle, MainWindows.ConveyorAxisId, ref TempMpos);//如果编码器位置抓取正确if (0 == MainWindows.ZauxErr) {//编码器往前运动了多少TempMpos = TempMpos - MainWindows.MoveSyncBuff[0, 4];//判断是否处于同步起始区if (((MainWindows.MoveSyncBuff[0, 1] + TempMpos) >= MainWindows.SyncReX[0]) && ((MainWindows.MoveSyncBuff[0, 1] + TempMpos) <= MainWindows.SyncReX[1])){WriteLog("开始同步抓取");//取一组数据MoveSyncTemp[0] = MainWindows.MoveSyncBuff[0, 1] ; //XMoveSyncTemp[1] = MainWindows.MoveSyncBuff[0, 2] ; //Y MoveSyncTemp[2] = MainWindows.GetBinHigt; //取料高度MoveSyncTemp[3] = MainWindows.MoveSyncBuff[0, 3]; //AanleMoveSyncTemp[4] = MainWindows.MoveSyncBuff[0, 4]; //Mpos//下发同步运动的指令//0、复位输出口zmcaux.ZAux_Direct_MoveOp(MainWindows.g_Handle, MainWindows.gVAxisList[0], MainWindows.VacSucIo, 0);//1、先同步上传送带zmcaux.ZAux_Direct_MoveSync(MainWindows.g_Handle, 0, 0, MainWindows.MoveSyncBuff[0, 4], MainWindows.ConveyorAxisId, 4, MainWindows.gVAxisList, MoveSyncTemp);//2、同步一段时间(关节轴有滞后) 50mszmcaux.ZAux_Direct_MoveSync(MainWindows.g_Handle, 0, 50, MainWindows.MoveSyncBuff[0, 4], MainWindows.ConveyorAxisId, 4, MainWindows.gVAxisList, MoveSyncTemp);//3、打开真空吸嘴zmcaux.ZAux_Direct_MoveOp(MainWindows.g_Handle, MainWindows.gVAxisList[0], MainWindows.VacSucIo, 1);//4、同步一段时间 1500mszmcaux.ZAux_Direct_MoveSync(MainWindows.g_Handle, 0, 700, MainWindows.MoveSyncBuff[0, 4], MainWindows.ConveyorAxisId, 4, MainWindows.gVAxisList, MoveSyncTemp);//5、同步段把Z轴提升到安全高度,选择轴到放料角度MoveSyncTemp[2] = MainWindows.StandPos[2]; //取料高度zmcaux.ZAux_Direct_MoveSync(MainWindows.g_Handle, 0, 100, MainWindows.MoveSyncBuff[0, 4], MainWindows.ConveyorAxisId, 4, MainWindows.gVAxisList, MoveSyncTemp);//4、解除同步去放料点MoveSyncTemp[0] = MainWindows.EmptPos[0]; //XMoveSyncTemp[1] = MainWindows.EmptPos[1]; //Y MoveSyncTemp[2] = MainWindows.EmptPos[2]; //放料高度MoveSyncTemp[3] = MainWindows.EmptPos[3]; //Aanlezmcaux.ZAux_Direct_MoveSync(MainWindows.g_Handle, -1, 0, 0, -1, 4, MainWindows.gVAxisList, MoveSyncTemp);//5、关闭真空吸嘴放料,Delay100mszmcaux.ZAux_Direct_MoveOp(MainWindows.g_Handle, MainWindows.gVAxisList[0], MainWindows.VacSucIo, 0);zmcaux.ZAux_Direct_MoveDelay(MainWindows.g_Handle, MainWindows.gVAxisList[0], 100);//6、去安全高度MoveSyncTemp[0] = MainWindows.EmptPos[0]; //XMoveSyncTemp[1] = MainWindows.EmptPos[1]; //Y MoveSyncTemp[2] = MainWindows.StandPos[2]; //放料高度MoveSyncTemp[3] = MainWindows.EmptPos[3]; //Aanlezmcaux.ZAux_Direct_MoveAbs(MainWindows.g_Handle, 4, MainWindows.gVAxisList, MoveSyncTemp);//操作MoveSyncBuff数据先加锁while (true){if (MainWindows.SetMoveSyncFlag == 0){MainWindows.SetMoveSyncFlag = 1;break;}}//视觉匹配缓冲区数据往前覆盖for (int k = 0; k < 49; k++){MainWindows.MoveSyncBuff[k, 0] = MainWindows.MoveSyncBuff[k + 1, 0];MainWindows.MoveSyncBuff[k, 1] = MainWindows.MoveSyncBuff[k + 1, 1];MainWindows.MoveSyncBuff[k, 2] = MainWindows.MoveSyncBuff[k + 1, 2];MainWindows.MoveSyncBuff[k, 3] = MainWindows.MoveSyncBuff[k + 1, 3];MainWindows.MoveSyncBuff[k, 4] = MainWindows.MoveSyncBuff[k + 1, 4];}//解锁MainWindows.SetMoveSyncFlag = 0;//等待输出口打开int TimeOut = 10000;TimeOut = 100000;//等待轴停止int AxisIdle = 0; //轴停止状态while (TimeOut > 0){zmcaux.ZAux_Direct_GetIfIdle(MainWindows.g_Handle, MainWindows.gVAxisList[0], ref AxisIdle);if (AxisIdle == (-1)){break;}Thread.Sleep(10);TimeOut = TimeOut - 10;}if (TimeOut <= 0){//超时要报错,程序要停止WriteLog("等待轴停止超时");//Thread.Sleep(100);SysRunFlag = 0;break;}SortNum.Text = (Convert.ToInt32(SortNum.Text) + 1).ToString();WriteLog("放料成功");//退出while 单次循环continue;}else if ((MainWindows.MoveSyncBuff[0, 1] + TempMpos) > MainWindows.SyncReX[1]){//操作MoveSyncBuff数据先加锁while (true){if (MainWindows.SetMoveSyncFlag == 0){MainWindows.SetMoveSyncFlag = 1;break;}}//视觉匹配缓冲区数据往前覆盖for (int k = 0; k < 49; k++){MainWindows.MoveSyncBuff[k, 0] = MainWindows.MoveSyncBuff[k + 1, 0];MainWindows.MoveSyncBuff[k, 1] = MainWindows.MoveSyncBuff[k + 1, 1];MainWindows.MoveSyncBuff[k, 2] = MainWindows.MoveSyncBuff[k + 1, 2];MainWindows.MoveSyncBuff[k, 3] = MainWindows.MoveSyncBuff[k + 1, 3];MainWindows.MoveSyncBuff[k, 4] = MainWindows.MoveSyncBuff[k + 1, 4];}//解锁MainWindows.SetMoveSyncFlag = 0;//如果视觉匹配缓冲区没有数据了if (MainWindows.MoveSyncBuff[0, 0] == 0){//Delta去待机位zmcaux.ZAux_Direct_MoveAbs(MainWindows.g_Handle, 4, MainWindows.gVAxisList, MainWindows.StandPos);WriteLog("去待机位");}}}}else{//Delta去待机位zmcaux.ZAux_Direct_MoveAbs(MainWindows.g_Handle, 4, MainWindows.gVAxisList, MainWindows.StandPos);}Thread.Sleep(50);}//停止传送带zmcaux.ZAux_Direct_Single_Cancel(MainWindows.g_Handle, MainWindows.ConveyorAxisId, 2);}
}
本次,正运动技术C#之Delta并联机械手的视觉同步分拣,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
相关文章:
C#之Delta并联机械手的视觉同步分拣
本文导读 前面两节课程我们介绍了怎么建立Delta并联机械手的正逆解以及如何通过视觉进行匹配定位。本节课程给大家分享如何通过C#语言开发正运动Delta并联机械手传送带同步的视觉分拣。 VPLC711硬件介绍 VPLC711是正运动推出的一款基于x86平台和Windows操作系统的高性能机器…...
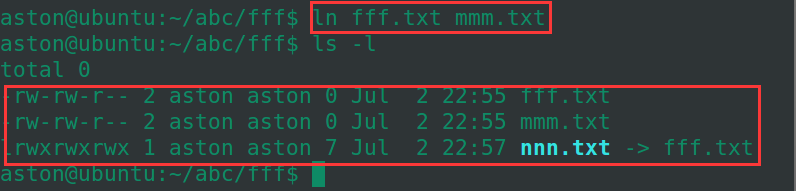
01:Linux的基本命令
Linux的基本命令 1、常识1.1、Linux的隐藏文件1.2、绝对路径与相对路径 2、基本命令2.1、ls2.2、cd2.3、pwd / mkdir / mv / touch / cp / rm / cat / rmdir2.4、ln2.5、man2.6、apt-get 本教程是使用的是Ubuntu14.04版本。 1、常识 1.1、Linux的隐藏文件 在Linux中…...

GNSS 载波、测距码和导航电文的关系简介
1、GNSS 载波、测距码和导航电文 在卫星导航系统中,载波、测距码和导航电文是构成GPS信号的三个基本组成部分,它们共同工作以实现精确的卫星定位和导航功能。以下是对这三个组成部分的详细介绍: 1. 载波(Carrier)&…...
 ----------- 锁造成的阻塞问题)
deepE 定位系统卡顿问题实战(一) ----------- 锁造成的阻塞问题
deepE介绍 deepE是一个开源的用于端侧(自动驾驶车,机器人)等环境的系统问题与性能分析工具。基于ebpf功能实现 deepE项目地址 欢迎star 测试程序 #include <iostream> #include <thread> #include <mutex>static std::mutex lock;void func1() {int l…...
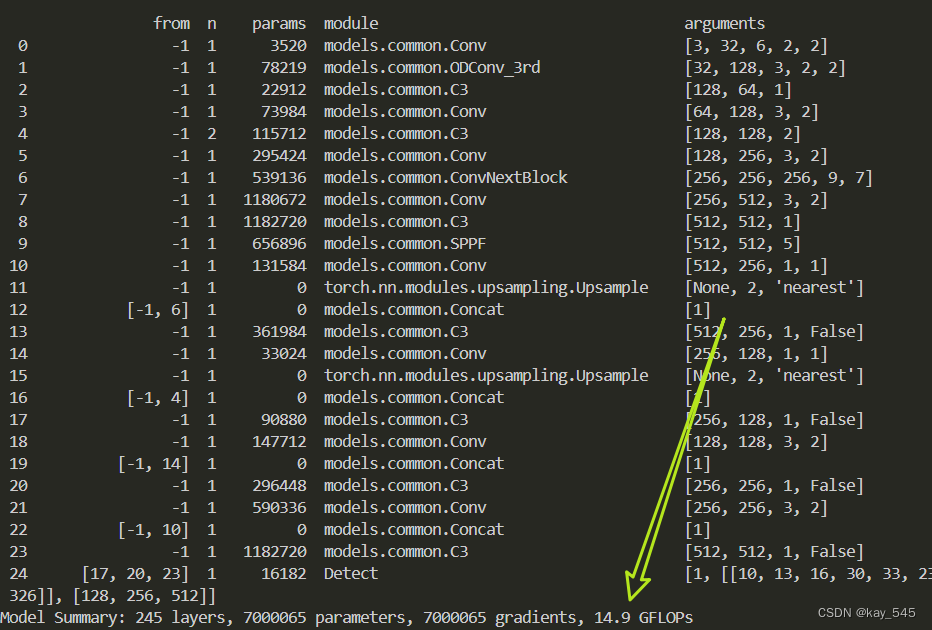
YOLOv5改进 | 主干网络 | ODConv + ConvNeXt 增强目标特征提取能力
秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转 💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡 专栏目录: 《YOLOv5入门 …...
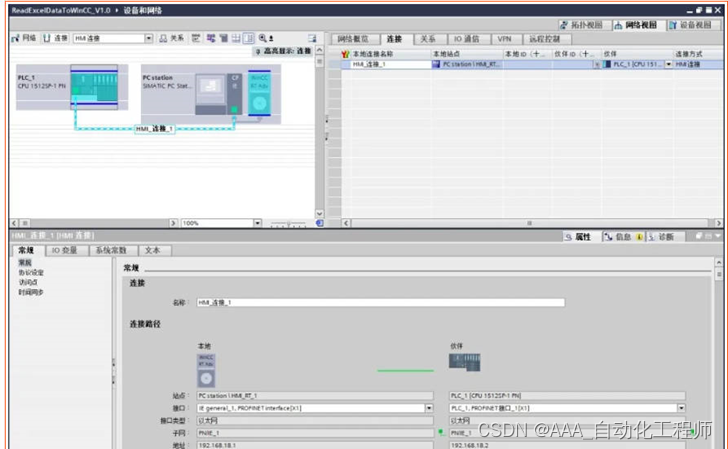
TIA博途WinCC通过VB脚本从 Excel中读取数据的具体方法介绍
TIA博途WinCC通过VB脚本从 Excel中读取数据的具体方法介绍 添加 一个PLC,设置PLC的IP地址,如下图所示, 添加全局DB块,新建几个变量,如下图所示, 在数据块中添加了 tag1 …… tag6 ,共 6 个浮点数类型的变量,用来接收通过 WinCC 从 Excel 文件中读取的数据。 添加 HMI…...

第5篇 区块链的技术架构:节点、网络和数据结构
区块链技术听起来很高大上,但其实它的核心架构并不难理解。今天我们就用一些简单的例子和有趣的比喻,来聊聊区块链的技术架构:节点、网络和数据结构。 节点:区块链的“细胞” 想象一下,区块链就像是一个大型的组织&a…...

vue长列表,虚拟滚动
1.新建子组件,将数据传递过去(几万条数据的数组,一次性展示多少条,每条数据的行高). <template><div class"vitualScroll"><sub-scroll :dataList"dataList" :rowCount"20" :rowHeight"2…...

【实战场景】记一次UAT jvm故障排查经历
【实战场景】记一次UAT jvm故障排查经历 开篇词:干货篇:1.查看系统资源使用情况2.将十进制进程号转成十六进制3.使用jstack工具监视进程的垃圾回收情况4.输出指定线程的堆内存信息5.观察日志6.本地环境复现 总结篇:我是杰叔叔,一名…...
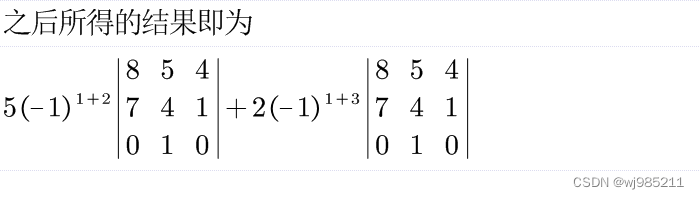
线性代数--行列式1
本篇来自对线性代数第一篇的行列式的一个总结。 主要是行列式中有些关键点和注意事项,便于之后的考研复习使用。 首先,对于普通的二阶和三阶行列式,我们可以直接对其进行拆开,展开。 而对于n阶行列式 其行列式的值等于它的任意…...

tensorflow神经网络
训练一个图像识别模型,使用TensorFlow,需要以下步骤。 1. 安装所需的库 首先,确保安装了TensorFlow和其他所需的库。 pip install tensorflow numpy matplotlib2. 数据准备 需要收集和准备训练数据。每个类别应有足够多的样本图像。假设有…...

Python基础001
Python输出语句 print输出字符串 print("中国四大名著:","西游记|","三国演义|","红楼梦|","水浒传") print(6) print(1 1)Python输入语句 input函数 input() input("我的名字是:") p…...
【udp报文】udp报文未自动分片,报文过长被拦截问题定位
问题现象 某局点出现一个奇怪的现象,客户端给服务端发送消息,服务端仅能收到小部分消息,大部分消息从客户端发出后,服务端都未收到。 问题定位 初步分析 根据现象初步分析,有可能是网络原因导致消息到服务端不可达&a…...

某网页gpt的JS逆向
原网页网址 (base64) 在线解码 aHR0cHM6Ly9jbGF1ZGUzLmZyZWUyZ3B0Lnh5ei8 逆向效果图 调用代码(复制即用) 把倒数第三行换成下面的base64解码 aHR0cHM6Ly9jbGF1ZGUzLmZyZWUyZ3B0Lnh5ei9hcGkvZ2VuZXJhdGU import hashlib import time import reques…...

【python脚本】批量检测sql延时注入
文章目录 前言批量检测sql延时注入工作原理脚本演示 前言 SQL延时注入是一种在Web应用程序中利用SQL注入漏洞的技术,当传统的基于错误信息或数据回显的注入方法不可行时,例如当Web应用进行了安全配置,不显示任何错误信息或敏感数据时&#x…...
)
在C++中如何理解const关键字的不同用法(如const变量、const成员函数、const对象等)
在C中,const关键字是一个非常重要的修饰符,它用于指明变量、函数参数、成员函数或对象的内容是不可变的。理解const的不同用法对于编写高质量、易维护的C代码至关重要。下面详细解释const在几种不同上下文中的用法和含义。 1. const变量 当变量被声明为…...

JavaSEJava8 时间日期API + 使用心得
文章目录 1. LocalDate2. LocalTime3. LocalDateTime3.1创建 LocalDateTime3.2 LocalDateTime获取方法 4. LocalDateTime转换方法4.1 LocalDateTime增加或者减少时间的方法4.2 LocalDateTime修改方法 5. Period6. Duration7. 格式转换7.1 时间日期转换为字符串7.2 字符串转换为…...

【亲测解决】Python时间问题
微信公众号:leetcode_algos_life,代码随想随记 小红书:412408155 CSDN:https://blog.csdn.net/woai8339?typeblog ,代码随想随记 GitHub: https://github.com/riverind 抖音【暂未开始,计划开始】…...

Linux屏幕驱动开发调试笔记
引言 首先了解下什么是MIPI-DSI: MIPI-DSI是一种应用于显示技术的串行接口,兼容DPI(显示像素接口,Display Pixel Interface)、DBI(显示总线接口,Display Bus Interface)和DCS(显示命令集,Display Command Set)&#…...

Nginx Http缓存的必要性!启发式缓存有什么弊端?
👀 Nginx Http缓存的必要性!启发式缓存有什么弊端? 简介启发式缓存引发的问题nginx缓存配置 简介 我们在使用React或者Vue开发项目中会使用hash、chunkhash、contenthash来给静态资源文件进行命名。这带来的好处便是当我们部署完项目后&…...

终极M3U8视频下载神器:3步搞定加密流媒体!
终极M3U8视频下载神器:3步搞定加密流媒体! 【免费下载链接】m3u8-downloader 一个M3U8 视频下载(M3U8 downloader)工具。跨平台: 提供windows、linux、mac三大平台可执行文件,方便直接使用。 项目地址: https://gitcode.com/gh_mirrors/m3u8d/m3u8-do…...

为什么选择Lacinia?5大优势带你了解这个强大的GraphQL解决方案
为什么选择Lacinia?5大优势带你了解这个强大的GraphQL解决方案 【免费下载链接】lacinia GraphQL implementation in pure Clojure 项目地址: https://gitcode.com/gh_mirrors/la/lacinia 在当今API开发领域,GraphQL已经成为构建高效数据接口的重…...

demo-magic常见问题解决:pv工具安装和终端兼容性完全指南
demo-magic常见问题解决:pv工具安装和终端兼容性完全指南 【免费下载链接】demo-magic A handy shell script that enables you to write repeatable demos in a bash environment. 项目地址: https://gitcode.com/gh_mirrors/de/demo-magic demo-magic是一个…...

Python量化交易框架moltfi:从回测到实盘的轻量级解决方案
1. 项目概述:一个为现代金融科技而生的开源量化框架如果你在金融科技或者量化交易领域摸爬滚打过一段时间,大概率会和我有同样的感受:市面上的开源量化框架,要么是“巨无霸”级别的庞然大物,功能齐全但学习曲线陡峭&am…...

如何快速配置阅读APP书源:26个高质量小说资源一键导入指南
如何快速配置阅读APP书源:26个高质量小说资源一键导入指南 【免费下载链接】Yuedu 📚「阅读」自用书源分享 项目地址: https://gitcode.com/gh_mirrors/yu/Yuedu 阅读APP作为一款开源的小说阅读工具,本身不提供小说内容,而…...

专业解析开源AI浏览器助手:Page Assist的深度技术架构与实战应用
专业解析开源AI浏览器助手:Page Assist的深度技术架构与实战应用 【免费下载链接】page-assist Use your locally running AI models to assist you in your web browsing 项目地址: https://gitcode.com/GitHub_Trending/pa/page-assist Page Assist是一款革…...

美颜SDK如何选择?直播APP开发最容易忽略的几个问题
这几年,直播行业的竞争已经从“有没有功能”,逐渐演变成了“用户体验够不够好”。很多团队在做直播APP时,往往会把重点放在推流、连麦、礼物、私域运营这些显性功能上,却忽略了一个对用户留存影响极大的核心模块——美颜SDK。尤其…...
)
别再手动记版本了!Xilinx FPGA两种自动记录编译时间的方法实测对比(附Tcl脚本)
Xilinx FPGA版本管理实战:Tcl脚本与USR_ACCESS原语深度评测 每次编译FPGA设计时手动记录版本号的时代该结束了。在快速迭代的硬件开发中,精确追踪每个比特流文件的生成时间对调试和版本控制至关重要。本文将深入对比两种自动化方案——Tcl脚本与USR_ACCE…...

上海软件定制开发技术路径深度拆解:PaaS云架构如何重构企业系统交付模式
摘要:本文围绕上海软件定制开发的核心技术路径展开分析,重点拆解PaaS云架构在企业软件交付中的实现机制、架构取舍与落地约束,并结合典型平台的工程实践,探讨不同开发模式在性能、兼容性与运维成本上的真实差异。企业在推进数字化…...

Input Leap:一款让多设备共享键盘鼠标变得简单高效的开源KVM软件
Input Leap:一款让多设备共享键盘鼠标变得简单高效的开源KVM软件 【免费下载链接】input-leap Open-source KVM software 项目地址: https://gitcode.com/gh_mirrors/in/input-leap 你是否厌倦了在多个电脑之间来回切换键盘和鼠标?是否希望用一套…...