51单片机第21步_将TIM0用作两个8位定时器同时将TIM1用作波特率发生器
本章重点讲解将TIM0用作两个8位定时器,同时将TIM1用作波特率发生器。
当定时器T0在方式3时,T1不能产生中断,但可以正常工作在方式0、1、2下,大多数情况下,T1将用作串口的波特率发生器。
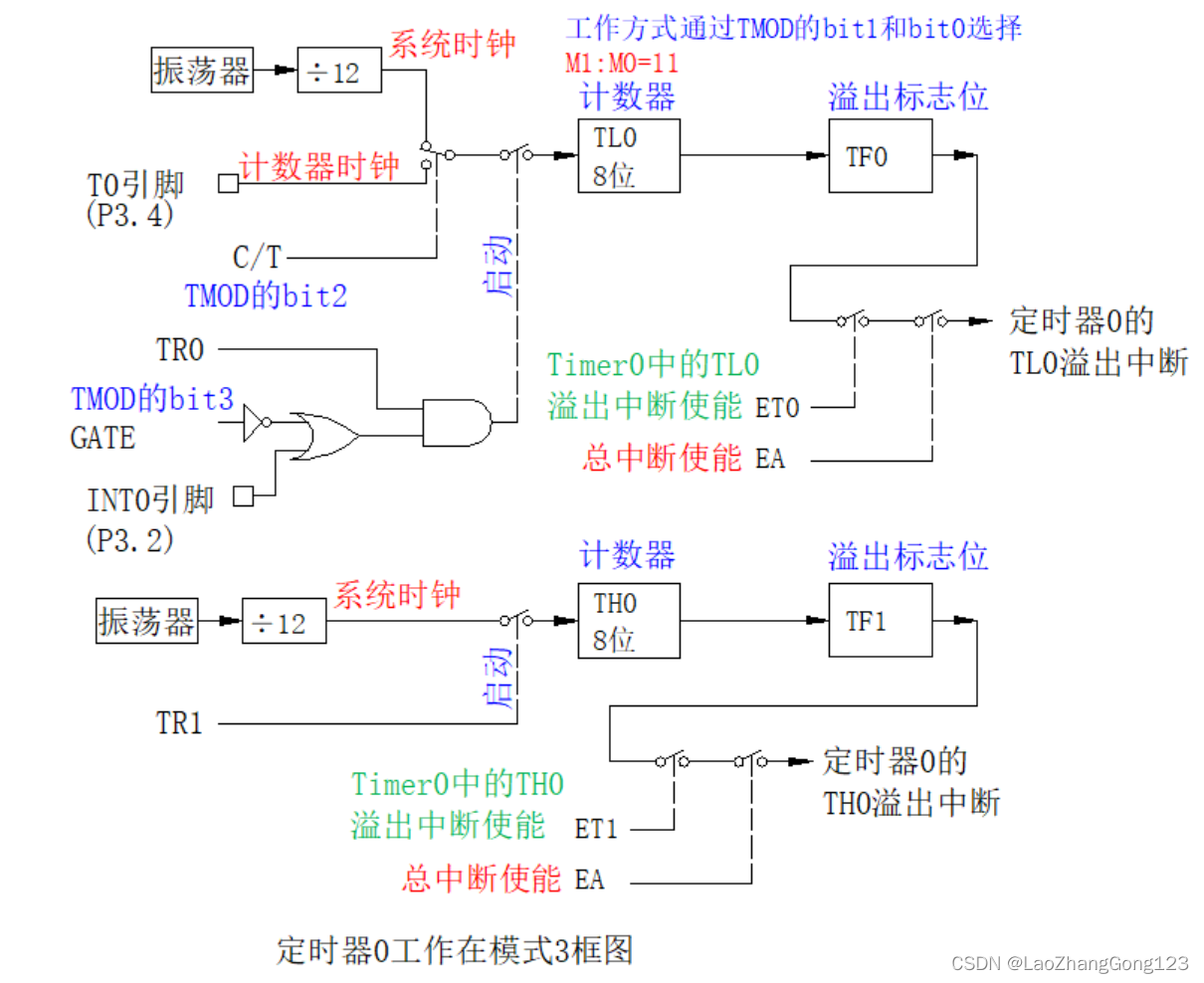
1、定时器0工作在模式3框图:
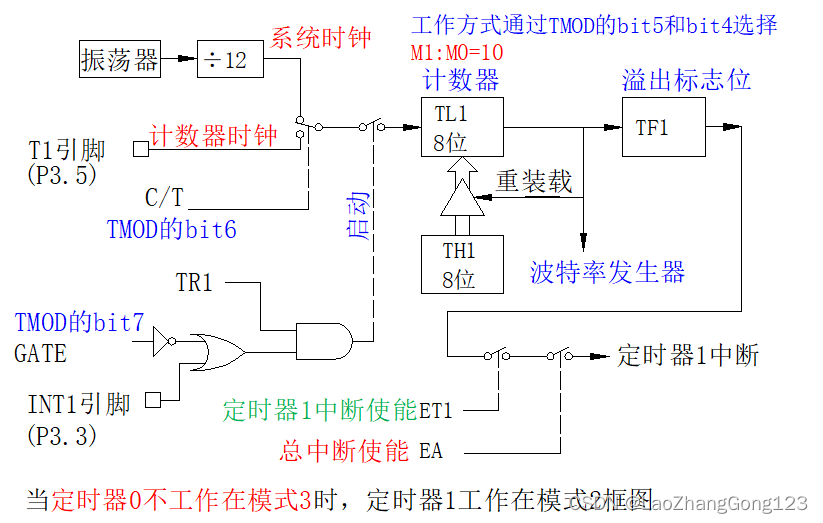
2、定时器1工作在模式2用作波特率发生器框图:
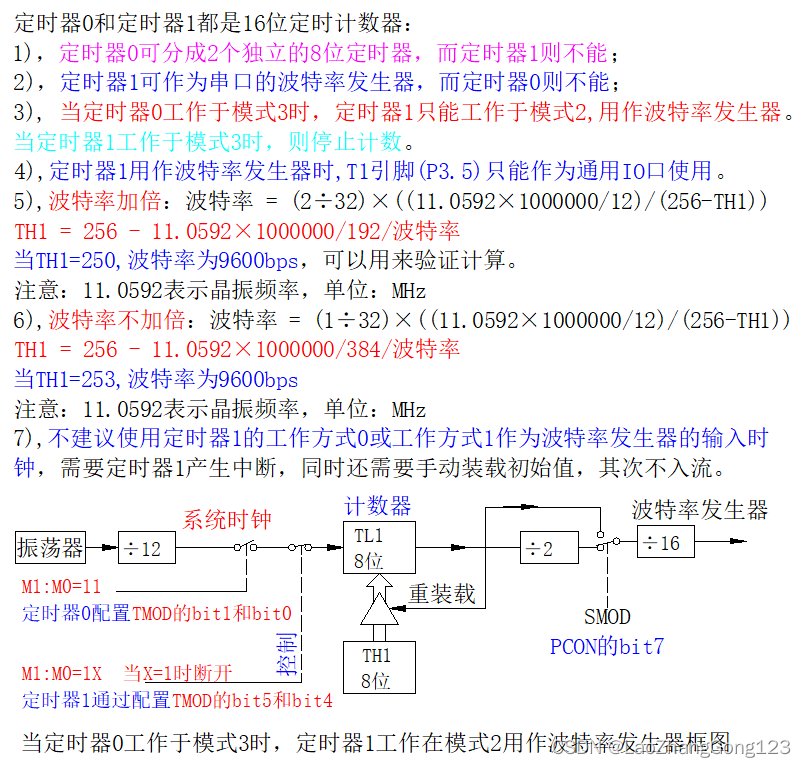
51单片机定时器T1用作波特率发生器时,常选用定时器T1的工作方式为2,有人说可以使用工作方式0或工作方式1,不清楚。我觉得不入流的想法,不要去好奇。
3、定时器0工作在模式3应用
#include <REG51.h> //包含头文件REG51.h,使能51内部寄存器;
#include <stdio.h> //包含头文件stdio.h
//_getkey();从串口读入一个字符;
//putchar();向串口发送一个字节;
//printf();向串口发送一串字节;
//定时器的方式控制寄存器TMOD: GATE1,C/T1,M1_1,M1_0,GATE0,C/T0,M0_1,M0_0
//GATE1=1,表示T1是受INT1脚(P3.3)控制运行;
//C/T1=0,表示T1的时钟源为fosc/12;C/T1=1,表示T1的时钟源为T1脚(P3.5);
//GATE0=1,表示T0是受INT0脚(P3.2)控制运行;
//C/T0=0,表示T0的时钟源为fosc/12;C/T0=1,表示T0的时钟源为T0脚(P3.4);
//下面说明T0的工作方式
//M0_1:M0_0=00,表示T0为13位定时器/计数器;
//M0_1:M0_0=01,表示T0为16位定时器/计数器;
//M0_1:M0_0=10,表示T0为8位自动重装载定时器/计数器;
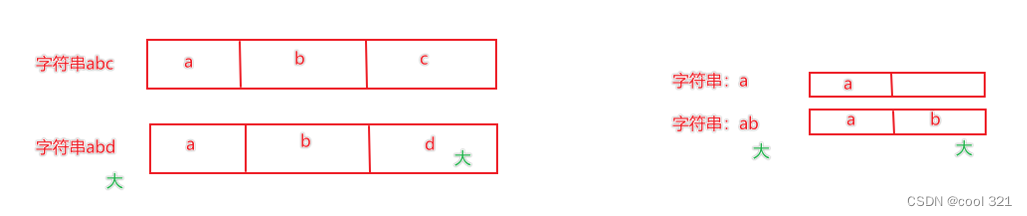
//M0_1:M0_0=11,表示T0分为两个8位计数器;
//下面说明T1的工作方式
//M1_1:M1_0=00,表示T1为13位定时器/计数器;
//M1_1:M1_0=01,表示T1为16位定时器/计数器;
//M1_1:M1_0=10,表示T1为8位自动重装载定时器/计数器;
//M1_1:M1_0=11,表示T1没有此工作方式;
//定时器的控制寄存器TCON: TF1,TR1,TF0,TR0,IE1,IT1,IE0,IT0
//TF1=1,表示T1溢出到0x0000,CPU响应中断后,由硬件自动清除;
//当GATE1=0时,TR1=1,表示启动T1开始工作,当GATE1=1时,Timer1由INT1脚(P3.3)和TR0控制;
//TF0=1,表示T0溢出到0x0000,CPU响应中断后,由硬件自动清除;
//当GATE0=0时,TR0=1,表示启动T0开始工作,当GATE0=1时,Timer0由INT0脚(P3.2)和TR0控制;
#define OSC_FREQ 11059200L
//#define BAUD_115200 256 - (OSC_FREQ/192L)/115200L //
//#define BAUD_38400 256 - (OSC_FREQ/192L)/38400L //
#define BAUD_Time 1
#if(BAUD_Time==1)
//若波特率加倍,则使用下面参数;
#define BAUD_57600 256 - (OSC_FREQ/192L)/57600L //255
#define BAUD_28800 256 - (OSC_FREQ/192L)/28800L //254
#define BAUD_19200 256 - (OSC_FREQ/192L)/19200L //253
#define BAUD_14400 256 - (OSC_FREQ/192L)/14400L //252
#define BAUD_9600 256 - (OSC_FREQ/192L)/9600L //250
#define BAUD_4800 256 - (OSC_FREQ/192L)/4800L //244
#define BAUD_2400 256 - (OSC_FREQ/192L)/2400L //232
#define BAUD_1200 256 - (OSC_FREQ/192L)/1200L //208
#else
//若波特率不加倍,则使用下面参数;
#define BAUD_9600 256 - (OSC_FREQ/384L)/9600L
#define BAUD_4800 256 - (OSC_FREQ/384L)/4800L
#define BAUD_1200 256 - (OSC_FREQ/384L)/1200L
#endif
#define TL0_Load_Value 256-100L //配置TL0为100us中断一次;
#define TH0_Load_Value 256-200L //配置TH0为200us中断一次;
sbit LED1 = P1^0;
sbit LED2 = P1^1;
uynsigned int Time0TL0Count;
uynsigned int Time0TH0Count;
//函数功能: TL0计数器的中断服务函数,每100us中断一次;
void TL0_interrupt_program() interrupt 1 using 1
{ TL0=TL0_Load_Value; //手动装载初值;
Time0TL0Count++;
if(Time0TL0Count>5000)//0.5秒
LED1=~LED1;
}
//函数功能: TH0计数器的中断服务函数,每200us中断一次;
void TH0_interrupt_program() interrupt 3 using 1
{
TH0=TH0_Load_Value; //手动装载初值;
Time0TH0Count++;
if(Time0TH0Count>5000)//0.5秒
LED2=~LED2;
}
//函数功能: Timer0初始化;
void timer0_initializtion()
{ TMOD&= 0xF4; //设置GATE0=0,即不允许外部INT0脚控制Timer0;
TMOD|= 0x03; //配置Timer0为方式3(两个8位定时器,一个用TL0计数,一个用TH0计数);
TL0=TL0_Load_Value; //手动装载初值;
TH0=TH0_Load_Value; //手动装载初值;
TR0=1; //当GATE0=0时,TR0=1,表示启动Timer0中的TL0开始工作;
TR1=1; //设置Timer0的TH0时钟源为晶振频率的1/12,并启动TH0开始工作;
ET0=1; //允许Timer0中的TL0溢出中断;
ET1=1; //允许Timer0中的TH0溢出中断;
EA=1; //开总中断允许位;
Time0TL0Count=0;
Time0TH0Count=0;
}
//函数功能: Timer1初始化;
void timer1_initializtion()
{ TMOD&= 0x4F; //设置GATE1=0,即不允许外部INT1脚控制Timer1;
TMOD|= 0x20; //配置Timer1为方式2(8位自动重装载),用于波特率发生器;
TH1=BAUD_9600; //TH1: reload value for 9600 baud @11.0592MHz;
TL1=TH1;
}
//函数功能:初始化串口,设置波特率为9600bps@11.0592MHz,使能接收,使用8位UART;
void Serial_Port_Initialization()
{ PCON = 0x80;
SCON=0x50; //串行控制寄存器: SM0,SM1,SM2,REN,TB8,RB8,TI,RI
//SM1:SM0=01,选择方式1,SM2=0,表示非多机通讯,8-bit UART;
//REN=1,使能接收;
timer1_initializtion();
TI=1; //发送UART的第一个字节,为下次发送做准备;
RI=0;
//ES=1; //使能串口接收和发送中断;
EA=1; //开总中断
}
void main(void)
{ timer0_initializtion(); //Timer0初始化;
Serial_Port_Initialization();
//初始化串口,设置波特率为9600bps@11.0592MHz,使能接收,使用8位UART;
printf( "Timer0 works in mode3;\n" );
printf( "TL0 is a timer.\n" );
printf( "TH0 is a timer,too;\n" );
printf( "Timer1 works in mode2,It is a baud_rate_generator!\n" );
while(1);
{
}
}
相关文章:
51单片机第21步_将TIM0用作两个8位定时器同时将TIM1用作波特率发生器
本章重点讲解将TIM0用作两个8位定时器,同时将TIM1用作波特率发生器。 当定时器T0在方式3时,T1不能产生中断,但可以正常工作在方式0、1、2下,大多数情况下,T1将用作串口的波特率发生器。 1、定时器0工作在模式3框图&a…...
API-元素尺寸与位置
学习目标: 掌握元素尺寸与位置 学习内容: 元素尺寸与位置仿京东固定导航栏案例实现bilibili点击小滑块移动效果 元素尺寸与位置: 使用场景: 前面案例滚动多少距离,都是我们自己算的,最好是页面滚动到某个…...

C语言中的基础指针操作
在C语言中,指针是一个非常重要的概念,它提供了直接访问内存地址的能力。指针变量用于存储内存地址,而不是数据值,在某种意义上和门牌号具有相似含义:指针是一个变量,其存储的是另一个变量的内存地址&#x…...

LabVIEW环境下OCR文字识别的实现策略与挑战解析
引言 在自动化测试领域,OCR(Optical Character Recognition,光学字符识别)技术扮演着重要角色,它能够将图像中的文字转换成机器可编辑的格式。对于使用LabVIEW约5个月,主要进行仪器控制与数据采集的你而言…...
)
中英双语介绍美国的州:堪萨斯州(Kansas)
中文版 堪萨斯州简介 堪萨斯州(Kansas)位于美国中部,以其广阔的平原、丰富的农业资源和多样的文化遗产而著称。以下是对堪萨斯州的详细介绍,包括其地理位置、人口、经济、教育、文化和主要城市。 地理位置 堪萨斯州位于美国中…...
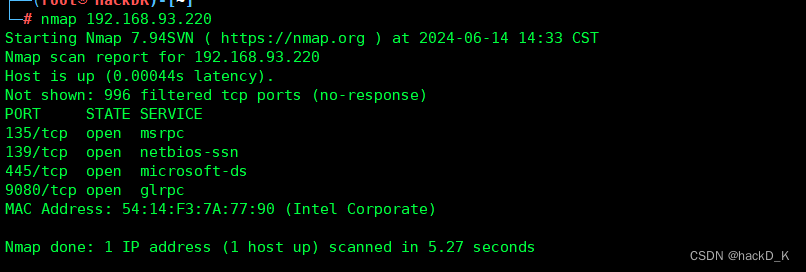
信息收集---端口服务信息收集
1. 什么是端口 是设备与外界通讯交流的出口。端口可分为虚拟端口和物理端口,其中虚拟端口指计算机内部或交换机路由器内的端口,不可见。例如计算机中的80端口、21端口、23端口等。物理端口又称为接口,是可见端口,计算机背板的RJ45…...
Python知识点背诵手册,超详细知识梳理
一、手册介绍 《Python知识点背诵手册》是一份详尽的Python学习资料,旨在帮助学习者系统地掌握Python语言的基础知识和进阶技能。该手册将Python的所有关键语法和概念进行了精炼的总结,并以易于理解和记忆的方式呈现。以下是手册的主要特点和内容概述&a…...

【Pytorch实用教程】如何在多个GPU上使用分布式数据并行进行训练模型
文章目录 1. 代码(可直接运行,含随机生成的训练数据)2. 代码的详细解释2.1. 导入必要的库和模块2.2. 设置每个进程的初始设置2.3. 随机生成数据集类 `RandomDataset`2.4. 训练函数 `train`1. 代码(可直接运行,含随机生成的训练数据) 以下是一个基于PyTorch的多GPU分布式…...
)
PIL,OpenCV,Pytorch处理图像时的通道顺序(颜色,长宽深)
项目颜色通道顺序长宽通道顺序数据类型取值范围PILRGBHWCndarray0-255 (byte)OpenCVBGRHWCndarray0-255 (byte)PyTorchRGB/BGR (取决于如何读取)(N)CHWtensor0-1 (float, 标准化后); 0-255 (int, 未标准化) 注意以下几点: 颜色通道顺序:PIL默认使用RGB顺…...

经纬恒润亮相2024世界智能产业博览会
近日,以“智行天下 能动未来”为主题的2024世界智能产业博览会(以下简称“智博会”)在国家会展中心(天津)成功举办。本次智博会上,经纬恒润自主研发的汽车电子产品联合天津(西青)国家…...

Python序列化和反序列化
一.序列化和反序列化 在Python中,序列化(Serialization)和反序列化(Deserialization)是处理对象数据的过程,主要用于对象的存储或网络传输。 序列化(Serialization) 序列化是将Pyth…...

Stream toArray 好过collect
toArray 比collect 更好用,这样就不需要判断Null。 if(_user.getUserRole()!null) {_user.setRole(_roleList.stream().filter(_e->_e.getRoleId()_user.getUserRole()).toArray(Role[]::new)[0]); } if(_user.getUserRole()!null) {_user.setRole(_roleList.s…...

qt/c++/mysql教务管理系统
简介 qt/c/mysql教务管理系统 学生端,教师端,管理员端 演示 qt/c/mysql教务管理系统 源码获取 printf("白嫖勿扰,需要的加v%s","ywj17347418171");...

Echarts公共方法
Vue引入Echarts install 1.安装Echartsnpm install echarts --save 2.项目全局引入形式--#main.js 全局引入形式import * as echarts from "echarts"Vue.prototype.$echarts echarts 公共方法JS /*** author: wangjie* description: 通用echarts图表封装* date: …...
)
鸿蒙学习(二)
文章目录 1、弹窗2、走马灯(实现轮播图效果)3、注解6、多选框、单选框7、Stack8、TextTimer9、DatePicker 1、弹窗 显示提示信息或者用于用户交互 导入模块 prompt 接口 showToast:显示toast showDialog:显示对话框 showContextMenu:显示上下文菜单 sh…...
企业机构营销目前106短信群发还有用吗?此文告诉你该如何抉择!
在当今竞争激烈的企业营销环境中,106短信群发平台依然是众多企业机构青睐的营销工具之一。尽管互联网技术的发展带来了多样化的沟通方式,但106短信群发凭借其直达性强、成本低廉、覆盖广泛等优势,仍然保持着不错的营销效果。然而,…...

DJYGUI AI低代码图形编程开发平台:开启嵌入式软件图形编程新纪元
在科技高速发展的当今时代,软件开发行业对创新和高效的需求日益增长。DJYGUI AI低代码图形编程开发平台的出现,为智能屏、物联屏、串口屏等嵌入式显示设备领域带来了全新的机遇。该平台由都江堰操作系统 AI 代码自动生成平台研发,具有显著的优…...
为什么不能在foreach中删除元素
文章目录 快速失败机制(fail-fast)for-each删除元素为什么报错原因分析逻辑分析 如何正确的删除元素remove 后 breakfor 循环使用 Iterator 总结 快速失败机制(fail-fast) In systems design, a fail-fast system is one which i…...
python学习-tuple及str
为什么需要元组 定义元组 元组的相关操作 元组的相关操作 - 注意事项 元组的特点 字符串 字符串的下标(索引) 同元组一样,字符串是一个:无法修改的数据容器。 如果必须要修改字符串,只能得到一个新的字符串ÿ…...
Python深度理解系列之【排序算法——冒泡排序】
读者大大们好呀!!!☀️☀️☀️ 👀期待大大的关注哦❗️❗️❗️ 🚀欢迎收看我的主页文章➡️木道寻的主页 文章目录 🔥前言🚀冒泡排序python实现算法实现图形化算法展示 ⭐️⭐️⭐️总结 🔥前…...

3分钟快速上手:用BetterNCM安装器彻底改造你的网易云音乐
3分钟快速上手:用BetterNCM安装器彻底改造你的网易云音乐 【免费下载链接】BetterNCM-Installer 一键安装 Better 系软件 项目地址: https://gitcode.com/gh_mirrors/be/BetterNCM-Installer 还在使用功能单一的网易云音乐吗?想不想让你的播放器拥…...

ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程
ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程 【免费下载链接】ZjDroid Android app dynamic reverse tool based on Xposed framework. 项目地址: https://gitcode.com/gh_mirrors/zj/ZjDroid ZjDroid是一款基于Xposed框架的Android应用动态逆向分…...

Android 11开发避坑:为什么你的App获取的Wifi MAC地址总是变?手把手教你配置固定MAC
Android 11开发实战:彻底解决Wifi MAC地址随机化问题最近在开发一个设备管理系统时,遇到了一个棘手的问题:我们的App在Android 11设备上获取的Wifi MAC地址每次都不一样,导致基于MAC地址的设备识别功能完全失效。经过一周的深入研…...

Tftpd32/Tftpd64不止是TFTP!手把手教你玩转它的DHCP和Syslog服务器功能
Tftpd32/Tftpd64:解锁DHCP与Syslog服务的隐藏潜力当大多数人提起Tftpd32/Tftpd64时,第一反应往往是它作为TFTP服务器的功能。这款轻量级工具确实在文件传输领域表现出色,但它的能力远不止于此。今天,我们将深入探索这款软件中两个…...

AArch64内存管理:MAIR_EL3寄存器详解与应用
1. AArch64内存管理基础与MAIR_EL3寄存器定位 在Armv8-A/v9-A架构中,内存管理单元(MMU)通过多级页表实现虚拟地址到物理地址的转换。当处理器执行内存访问时,MMU会遍历页表条目(Translation Table Entry),其中包含两个关键信息:目…...

阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月
阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月 Jianbing Zhu 1^{1}1 1^{1}1 ECT-OS-JiuHuaShan 文明实验室 ORCID: 0009-0006-8591-1891 DOI: 10.5281/zenodo.20373157 Email: ect-os-jiuhuashanzoho…...

Graphin高级应用:结合GISDK构建配置化图分析模块的完整指南
Graphin高级应用:结合GISDK构建配置化图分析模块的完整指南 【免费下载链接】Graphin 🌌 A React toolkit for graph visualization based on G6. 项目地址: https://gitcode.com/gh_mirrors/gr/Graphin 在当今数据驱动的时代,图可视化…...

Lovable电商网站搭建:如何用不到3人技术团队,72小时内上线PCI-DSS合规MVP版本?
更多请点击: https://codechina.net 第一章:Lovable电商网站搭建 Lovable 是一个面向中小商户的轻量级电商解决方案,采用现代 Web 技术栈构建,强调可扩展性、用户体验与快速部署能力。本章将指导你从零开始搭建一个具备商品展示、…...

【2026实测】怎么提高论文原创度?盘点8款主流降AI工具,附结构级优化指南
写文章最怕碰到什么,是辛辛苦苦自己码出来的字,却被标了极高的AI值。目前很多文本审核机制对内容的原创度要求极高,纯手写的初稿也可能因为句式太工整被判定为机器生成的。 为了帮几个快被这事折腾疯了的学弟学妹找条出路,我花了…...

XZ6128A工作电压5-100V 输出电流5A 升压型大功率LED灯恒流驱动控制芯片
概述 XZ6128A是一款高效率、高精度的升压型大功率LED灯恒流驱动控制芯片。 XZ6128A内置高精度误差放大器,固定关断时间控制电路,恒流驱动电路等,特别适合大功率、多个高亮度LED灯串的恒流驱动。 XZ6128A采用固定关断时间的控制方式࿰…...