YOLO在目标检测与视频轨迹追踪中的应用
YOLO在目标检测与视频轨迹追踪中的应用
引言
在计算机视觉领域,目标检测与视频轨迹追踪是两个至关重要的研究方向。随着深度学习技术的飞速发展,尤其是卷积神经网络(CNN)的广泛应用,目标检测与视频轨迹追踪的性能得到了显著提升。YOLO(You Only Look Once)作为目标检测领域的代表性算法,凭借其高效的检测速度和良好的检测精度,成为了众多应用场景中的首选算法。本文将从YOLO算法的基本原理出发,探讨其在目标检测与视频轨迹追踪中的应用,并详细分析其在处理视频数据时的优势与挑战。
YOLO算法概述
YOLO的发展历程
YOLO算法由Joseph Redmon等人在2015年首次提出,其核心思想是将目标检测问题转化为一个回归问题,通过单个神经网络直接预测图像中所有目标的边界框和类别。随着技术的不断演进,YOLO系列算法已经发展到了多个版本,包括YOLOv1、YOLOv2(YOLO9000)、YOLOv3、YOLOv4以及最新的YOLOv5、YOLOv7等。每个新版本都在前一代的基础上进行了优化和改进,以提高检测速度、精度和泛化能力。
YOLO的核心思想
YOLO算法的核心思想可以概括为“一次只看一次”(You Only Look Once),即整个检测过程只需要对图像进行一次前向传播,即可同时预测出图像中所有目标的边界框和类别。这一特点使得YOLO算法在检测速度上具有明显的优势。具体来说,YOLO算法将输入图像划分为S×S的网格,每个网格负责预测中心点落在该网格内的目标。每个网格会预测B个边界框(Bounding Box)以及这些边界框的置信度(Confidence Score),同时还会预测C个类别的条件概率。最终,通过综合边界框的置信度和类别概率,可以得到每个目标的最终检测结果。
YOLO的优势与不足
YOLO算法的优势主要体现在以下几个方面:
- 检测速度快:由于YOLO算法只需要对图像进行一次前向传播即可完成检测,因此其检测速度非常快,可以达到实时检测的要求。
- 背景误检率低:由于YOLO算法在预测时会同时考虑图像的上下文信息,因此其对于背景区域的误检率相对较低。
- 泛化能力强:YOLO算法在训练时使用了大量的数据增强技术,使得其对于不同场景下的目标检测具有较好的泛化能力。
然而,YOLO算法也存在一些不足之处:
- 对小目标检测效果不佳:由于YOLO算法将图像划分为固定的网格,当目标尺寸较小时,可能无法被单个网格充分覆盖,导致检测效果不佳。
- 定位精度有限:相比于一些基于候选区域(Region Proposal)的目标检测算法,YOLO算法在目标定位精度上可能稍逊一筹。
YOLO在目标检测中的应用
目标检测的基本原理
目标检测是计算机视觉领域的一项基本任务,其目标是在图像或视频中识别出所有感兴趣的目标,并确定它们的位置和类别。目标检测通常包括两个步骤:首先是通过某种方式提取图像中的候选区域或特征点;然后是对这些候选区域或特征点进行分类和定位。YOLO算法通过直接预测图像中所有目标的边界框和类别,简化了这一过程,提高了检测效率。
YOLO在目标检测中的具体应用
YOLO算法在目标检测领域有着广泛的应用,包括但不限于以下几个方面:
- 智能监控:在智能监控系统中,YOLO算法可以用于实时检测监控画面中的行人、车辆等目标,实现异常行为检测、人流统计等功能。
- 自动驾驶:在自动驾驶领域,YOLO算法可以用于检测道路上的行人、车辆、交通标志等目标,为自动驾驶系统提供重要的环境感知信息。
- 医疗影像分析:在医疗影像分析领域,YOLO算法可以用于检测医学影像中的病灶、器官等目标,辅助医生进行疾病诊断和治疗方案的制定。
- 工业检测:在工业检测领域,YOLO算法可以用于检测生产线上的产品缺陷、异物等目标,提高产品质量和生产效率。
YOLO在视频轨迹追踪中的应用
视频轨迹追踪的基本原理
视频轨迹追踪是指在视频序列中持续跟踪并预测目标物体的运动轨迹。视频轨迹追踪通常包括目标检测、目标跟踪和目标轨迹预测三个步骤。其中,目标检测是确定视频序列中每一帧图像中的目标位置;目标跟踪是根据目标在连续帧之间的位置关系,建立目标的运动模型;目标轨迹预测则是基于目标的运动模型,预测目标在未来帧中的位置。
YOLO在视频轨迹追踪中的具体应用
YOLO算法在视频轨迹追踪中的应用主要体现在目标检测和目标跟踪两个环节。具体来说:
-
目标检测:在视频轨迹追踪的初始阶段,需要利用YOLO算法对视频序列中的每一帧图像进行目标检测,确定每一帧中的目标位置。由于YOLO算法的高效性,它能够快速处理视频帧,实现实时或接近实时的目标检测,为后续的目标跟踪提供基础。
-
目标跟踪:在得到每一帧的目标位置后,需要利用目标跟踪算法将不同帧中的同一目标关联起来,形成目标的运动轨迹。虽然YOLO本身不直接进行目标跟踪,但可以将YOLO检测到的目标作为跟踪算法的输入。常见的跟踪算法包括卡尔曼滤波、粒子滤波、深度学习跟踪器等。这些跟踪器可以利用YOLO提供的位置信息,结合目标的运动模型和外观特征,在连续帧之间对目标进行准确跟踪。
YOLO与跟踪算法的结合
在实际应用中,YOLO与跟踪算法的结合可以显著提高视频轨迹追踪的准确性和鲁棒性。一方面,YOLO检测到的目标位置为跟踪算法提供了可靠的初始化和验证信息,有助于跟踪算法在复杂场景中稳定地跟踪目标。另一方面,跟踪算法可以利用历史帧中的目标信息对YOLO的检测结果进行修正和补充,特别是在目标被遮挡或发生形变时,跟踪算法可以保持对目标的持续跟踪,而YOLO则可能因检测失败而丢失目标。
面临的挑战与解决方案
尽管YOLO在视频轨迹追踪中展现出了巨大的潜力,但在实际应用中仍面临一些挑战。例如:
-
目标遮挡与消失:当目标被其他物体遮挡或完全离开视场时,跟踪算法可能会丢失目标。为了解决这个问题,可以采用多目标跟踪算法,结合目标的运动模型和外观特征进行重检测或重新初始化跟踪。
-
目标形变与姿态变化:目标的形变和姿态变化会影响跟踪算法的准确性。为了应对这一问题,可以引入更强大的特征表示方法,如深度学习特征,以及更复杂的运动模型来适应目标的动态变化。
-
计算资源限制:视频轨迹追踪通常需要处理大量的视频帧,对计算资源有较高的要求。为了降低计算成本,可以采用轻量级的YOLO版本或优化跟踪算法的计算效率。
-
实时性要求:在某些应用场景中,如自动驾驶和智能监控,对视频轨迹追踪的实时性有严格的要求。为了满足这一要求,需要进一步优化YOLO算法和跟踪算法的性能,减少处理时间延迟。
结论与展望
综上所述,YOLO算法在目标检测与视频轨迹追踪中展现出了巨大的潜力和优势。通过与其他跟踪算法的结合和优化,YOLO能够更好地应对实际应用中的挑战,实现高效、准确的目标检测和轨迹追踪。未来,随着深度学习技术的不断发展和计算机硬件性能的提升,我们有理由相信YOLO及其相关算法将在更多领域发挥重要作用,推动计算机视觉技术的进一步发展。同时,也期待更多的研究者能够投入到这一领域的研究中,不断探索和创新,为我们带来更多优秀的研究成果和应用案例。

相关文章:
YOLO在目标检测与视频轨迹追踪中的应用
YOLO在目标检测与视频轨迹追踪中的应用 引言 在计算机视觉领域,目标检测与视频轨迹追踪是两个至关重要的研究方向。随着深度学习技术的飞速发展,尤其是卷积神经网络(CNN)的广泛应用,目标检测与视频轨迹追踪的性能得到…...
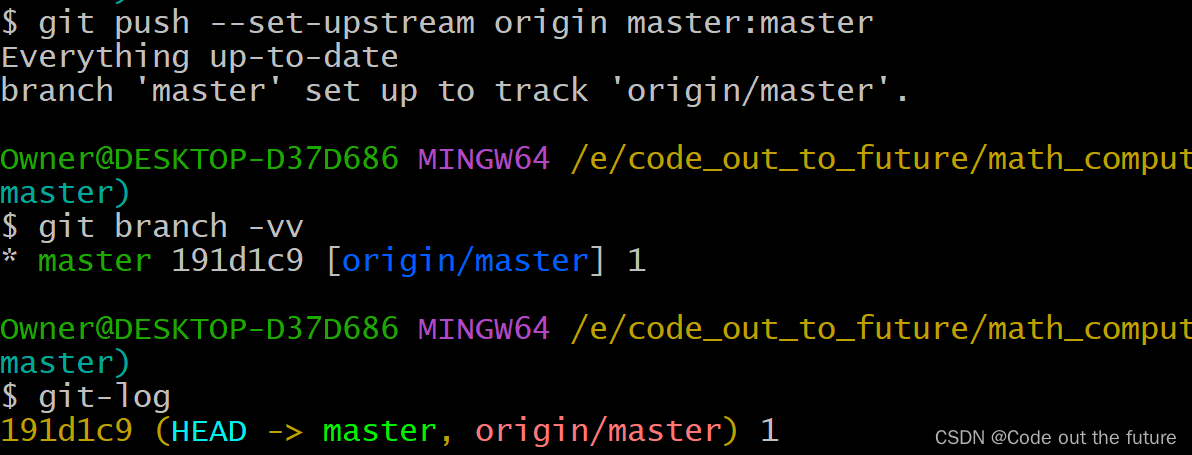
版本控制系统:Git 纯应用(持续更新)
基本操作 ctrl上行键:上次代码 本地仓库:Git init 新建文件:touch xxxx.xxx 查看状态:Git status 文件从工作区——暂存区:Git add ./文件名(.是通配符代表所有) 暂存区——仓库:Git commit -m &…...
从0开始搭建vue项目
#先查下电脑有没有安装过node和npm node -v npm -v #安装vue npm install -g vue #安装webpack npm install webpack -g 都安装好后,进入你想创建的文件夹内 创建名字:vue init webpack <project_name> 就默认回车 然后根据项目需求Y/n 比如…...

Java框架常见面试题
在Java框架面试中,面试官通常会考察候选人对常见Java框架的理解、使用经验以及解决问题的能力。以下是一些常见的Java框架面试题及其详细回答: 1. Spring框架相关问题 问题:Spring框架的核心组件有哪些?它们各自的作用是什么&am…...

linux c 应用编程定时器函数
在 Linux C 应用编程中,对于多线程编程中的定时器函数使用,通常可以借助 pthread 库和系统提供的定时器相关的函数来实现。 首先,常见的定时器函数有 setitimer() 和 alarm() 。setitimer() 函数可以更精确地设置定时器,它可以设…...
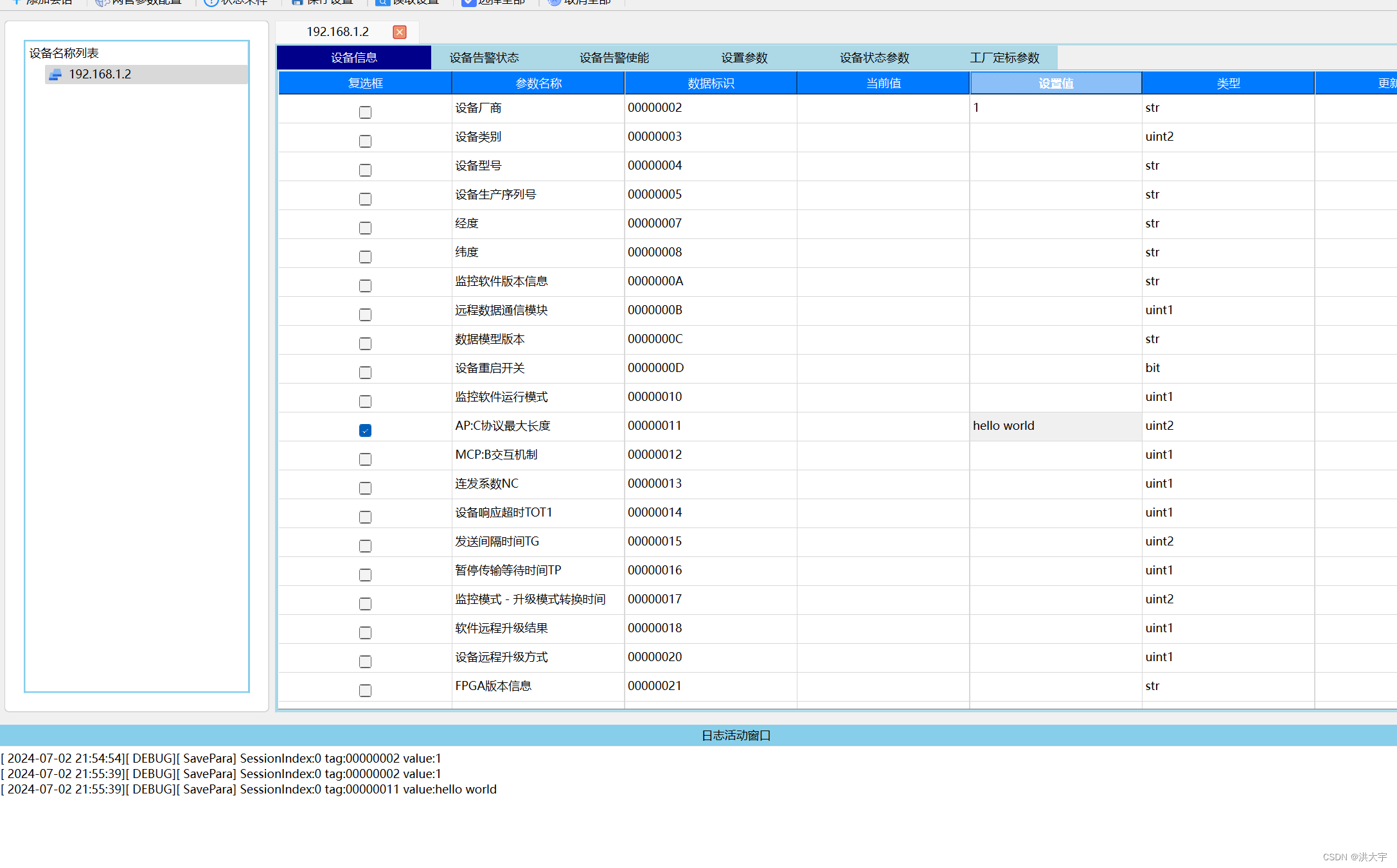
设备调试上位机GUI
C Fast Qt C 前端 原来真的不需要在 design 上画来画去,有chat-gpt 那里不知道问哪里 全是组件拼起来的,不需要画,最后发现其实也是定式模式,跟着AI 学套路 最终前端界面 鼠标邮件绑定几个功能 太nice 了 在再加一个全局的日志模块 yyds MVC 的架构, 视图…...

项目管理系统厂商:奥博思发布《项目管理系统助力 IPD 高效落地》演讲
一场题为:“标准为基,项目之上 ,持续提升 PMO 卓越中心”的全国 PMO 专业人士年度盛会在京召开。会议围绕 PMO 卓越中心能力提升、项目管理标准化、项目管理体系建设等核心话题力邀业界专家、卓有建树的 PMO 实践精英来演讲、交流、分享。 奥…...

Java项目总结1
1.什么是面向对象(此对象非彼对象) “面向对象的方法主要是把事物给对象化,包括其属性和行为。面向对象编程更贴近实际生活的思想。总体来说面向对象的底层还是面向过程,面向过程抽象成类,然后封装,方便使用…...

Java中的类加载机制详解
Java中的类加载机制详解 大家好,我是微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿! 类加载机制概述 在Java中,类加载机制是Java虚拟机(JVM)将.class文件加载到内存中并转换…...

SwiftUI 中 Grid 内多个 NavigationLink 同时发生导航之诡异问题的解决
问题现象 不知小伙伴们发现了没有?在 SwiftUI 中如果有多个 NavigationLink 视图嵌入在 Grid(包括 LazyVGrid 和 LazyHGrid)容器中,点击其中任意一个 NavigationLink 都会导致所有导航一起发生。 如上图所示,点击 Grid 中任何一个 NavigationLink,所有 NavigationLink 都…...
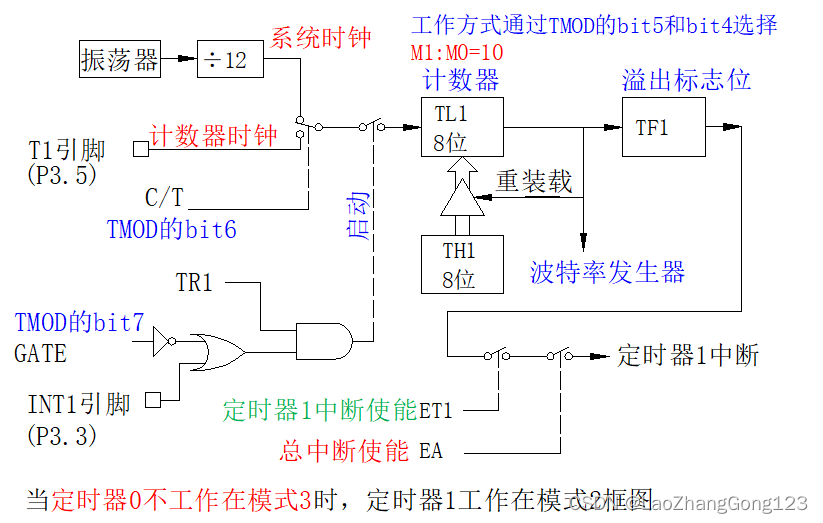
51单片机第21步_将TIM0用作两个8位定时器同时将TIM1用作波特率发生器
本章重点讲解将TIM0用作两个8位定时器,同时将TIM1用作波特率发生器。 当定时器T0在方式3时,T1不能产生中断,但可以正常工作在方式0、1、2下,大多数情况下,T1将用作串口的波特率发生器。 1、定时器0工作在模式3框图&a…...
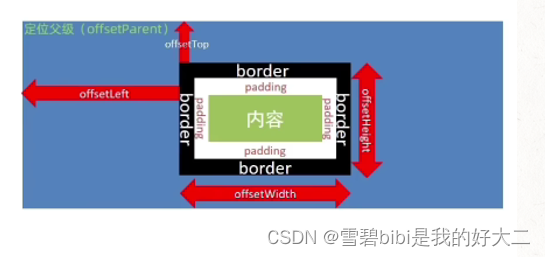
API-元素尺寸与位置
学习目标: 掌握元素尺寸与位置 学习内容: 元素尺寸与位置仿京东固定导航栏案例实现bilibili点击小滑块移动效果 元素尺寸与位置: 使用场景: 前面案例滚动多少距离,都是我们自己算的,最好是页面滚动到某个…...

C语言中的基础指针操作
在C语言中,指针是一个非常重要的概念,它提供了直接访问内存地址的能力。指针变量用于存储内存地址,而不是数据值,在某种意义上和门牌号具有相似含义:指针是一个变量,其存储的是另一个变量的内存地址&#x…...

LabVIEW环境下OCR文字识别的实现策略与挑战解析
引言 在自动化测试领域,OCR(Optical Character Recognition,光学字符识别)技术扮演着重要角色,它能够将图像中的文字转换成机器可编辑的格式。对于使用LabVIEW约5个月,主要进行仪器控制与数据采集的你而言…...
)
中英双语介绍美国的州:堪萨斯州(Kansas)
中文版 堪萨斯州简介 堪萨斯州(Kansas)位于美国中部,以其广阔的平原、丰富的农业资源和多样的文化遗产而著称。以下是对堪萨斯州的详细介绍,包括其地理位置、人口、经济、教育、文化和主要城市。 地理位置 堪萨斯州位于美国中…...
信息收集---端口服务信息收集
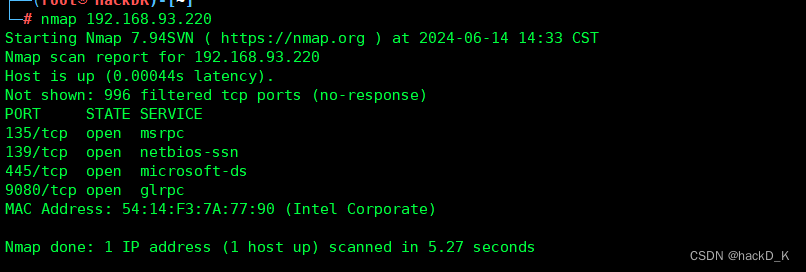
1. 什么是端口 是设备与外界通讯交流的出口。端口可分为虚拟端口和物理端口,其中虚拟端口指计算机内部或交换机路由器内的端口,不可见。例如计算机中的80端口、21端口、23端口等。物理端口又称为接口,是可见端口,计算机背板的RJ45…...
Python知识点背诵手册,超详细知识梳理
一、手册介绍 《Python知识点背诵手册》是一份详尽的Python学习资料,旨在帮助学习者系统地掌握Python语言的基础知识和进阶技能。该手册将Python的所有关键语法和概念进行了精炼的总结,并以易于理解和记忆的方式呈现。以下是手册的主要特点和内容概述&a…...

【Pytorch实用教程】如何在多个GPU上使用分布式数据并行进行训练模型
文章目录 1. 代码(可直接运行,含随机生成的训练数据)2. 代码的详细解释2.1. 导入必要的库和模块2.2. 设置每个进程的初始设置2.3. 随机生成数据集类 `RandomDataset`2.4. 训练函数 `train`1. 代码(可直接运行,含随机生成的训练数据) 以下是一个基于PyTorch的多GPU分布式…...
)
PIL,OpenCV,Pytorch处理图像时的通道顺序(颜色,长宽深)
项目颜色通道顺序长宽通道顺序数据类型取值范围PILRGBHWCndarray0-255 (byte)OpenCVBGRHWCndarray0-255 (byte)PyTorchRGB/BGR (取决于如何读取)(N)CHWtensor0-1 (float, 标准化后); 0-255 (int, 未标准化) 注意以下几点: 颜色通道顺序:PIL默认使用RGB顺…...

经纬恒润亮相2024世界智能产业博览会
近日,以“智行天下 能动未来”为主题的2024世界智能产业博览会(以下简称“智博会”)在国家会展中心(天津)成功举办。本次智博会上,经纬恒润自主研发的汽车电子产品联合天津(西青)国家…...

基于XGBoost与SHAP的分子气味预测:从特征工程到可解释性分析
1. 项目概述与核心价值在香水设计、食品风味工业乃至环境监测领域,一个核心且持久的挑战是:如何从分子的化学结构出发,准确预测其气味?这不仅仅是化学家或调香师的直觉游戏,更是一个复杂的、高维度的模式识别问题。传统…...

C语言双端队列完整实现:一行代码吃透头尾操作,算法效率拉满
一、为什么C语言实现双端队列,是数据结构的必学天花板?在C语言数据结构里,队列、栈都是基础中的基础,但真正能把灵活度、效率、内存管理三者揉到一起的,还得是双端队列(deque)。普通队列只能一头…...

一次搞懂内存取证:用Volatility3和Cobalt Strike分析工具复现VNCTF‘来一把紧张刺激的CS’
实战内存取证:从Volatility3到Cobalt Strike信标分析全解析 在网络安全事件响应中,内存取证往往是发现高级威胁的最后一道防线。当攻击者使用文件无落地的技术时,传统的磁盘取证可能一无所获,而内存中却保留着攻击行为的完整痕迹。…...

武汉国电华美16875kVA串联谐振试验装置,这手活儿细
在超高压变电站和长距离电缆的现场,交流耐压试验是检验设备绝缘的“最后一关”。这位老师傅经手过不少大工程,他说,面对GIS、大型变压器这些“大块头”电容性试品,能不能顺利“过关”,往往就看串联谐振装置顶不顶得住。…...
)
Unity3D深度纹理实战:手把手教你实现可交互的激光雷达扫描特效(附完整C#/Shader代码)
Unity3D深度纹理实战:手把手教你实现可交互的激光雷达扫描特效(附完整C#/Shader代码)在科幻题材的游戏开发中,激光雷达扫描特效是营造科技感的经典元素。从《赛博朋克2077》的战术目镜到《看门狗》的环境扫描,这种动态…...

NanaZip:现代Windows文件压缩问题的终极解决方案
NanaZip:现代Windows文件压缩问题的终极解决方案 【免费下载链接】NanaZip The 7-Zip derivative intended for the modern Windows experience 项目地址: https://gitcode.com/gh_mirrors/na/NanaZip 还在为Windows文件压缩工具界面老旧、功能单一而烦恼吗&…...
)
别再瞎拖拽了!Unity Prefab从创建到批量修改的保姆级工作流(含变体与嵌套实战)
Unity Prefab高效工作流:从创建到批量修改的实战指南在Unity项目开发中,Prefab(预制体)是最基础也最强大的工具之一。但很多开发者,尤其是初学者,往往停留在简单的"拖拽-修改"阶段,没…...

Go开发者必备:circuitbreaker API全解析与最佳实践指南 [特殊字符]
Go开发者必备:circuitbreaker API全解析与最佳实践指南 🚀 【免费下载链接】circuitbreaker Circuit Breakers in Go 项目地址: https://gitcode.com/gh_mirrors/circ/circuitbreaker 作为一名Go开发者,你是否经常遇到远程服务调用失败…...

Noto字体终极指南:告别“豆腐块“,让全球文字清晰显示
Noto字体终极指南:告别"豆腐块",让全球文字清晰显示 【免费下载链接】noto-fonts Noto fonts, except for CJK and emoji 项目地址: https://gitcode.com/gh_mirrors/no/noto-fonts 在数字世界中,你是否经常看到那些令人困…...

AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程
AICoverGen终极指南:快速创建AI翻唱歌曲的完整教程 【免费下载链接】AICoverGen A WebUI to create song covers with any RVC v2 trained AI voice from YouTube videos or audio files. 项目地址: https://gitcode.com/gh_mirrors/ai/AICoverGen 想要让你的…...