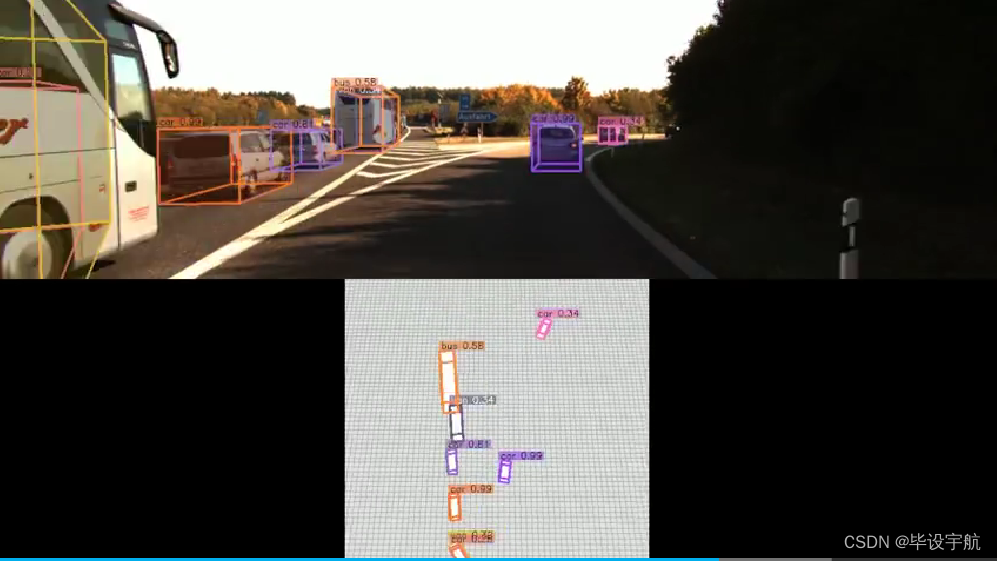
Omni3D目标检测
Omni3D是一个针对现实场景中的3D目标检测而构建的大型基准和模型体系。该项目旨在推动从单一图像中识别3D场景和物体的能力,这对于计算机视觉领域而言是一个长期的研究目标,并且在机器人、增强现实(AR)、虚拟现实(VR)以及其他需要精确定位和理解3D环境中物体的应用中尤为重要。
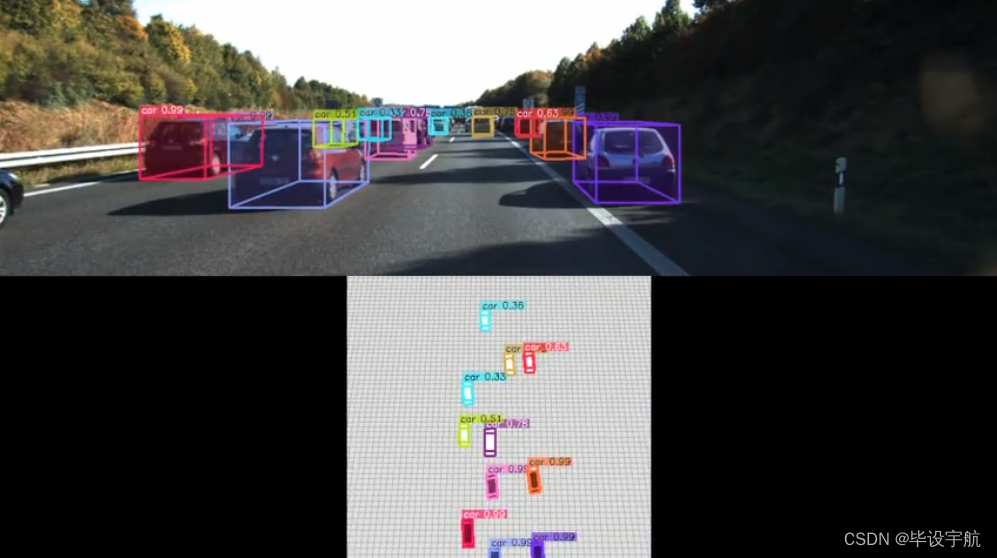
根据场景分为室内、室外、室内和室外统一模型:
关键特点:
-
综合性基准:Omni3D提供了一个广泛的基准测试集,覆盖了多种环境条件和场景类型,包括但不限于室内、室外、城市、乡村等,这有助于评估和比较不同3D目标检测算法的性能。
-
多样化数据:数据集中包含了丰富的标注信息,如3D边界框、类别标签、尺寸和姿态信息,使得研究人员能够在真实复杂场景下训练和测试他们的算法。

-
模型与算法:除了数据集,Omni3D可能还伴随着一些先进的3D目标检测模型,这些模型利用深度学习技术,在统一的框架下展示最新的研究成果。例如,提及的“UniMODE”就是一个试图统一室内和室外单目3D目标检测的模型,它在Omni3D基准上展示了先进水平的性能。
-
促进研究与应用:通过提供这样一套标准化的工具和资源,Omni3D促进了3D视觉领域的研究交流,帮助研究者们快速迭代和优化算法,同时也为实际应用提供了可行的技术参考。
应用前景:
-
自动驾驶汽车:准确检测和识别道路上的障碍物对于自动驾驶安全至关重要。
-
无人机导航与监控:在执行搜索救援或环境监测任务时,无人机需要理解其周围环境的3D结构。
-
AR/VR内容创建:为了提供更加沉浸式的体验,AR/VR应用需要实时感知并理解用户周围的3D空间。
-
机器人操作与物流:在仓库自动化或家庭服务机器人场景中,3D目标检测可以提高物品抓取、搬运的精度和效率。
综上所述,Omni3D作为一个全面的3D目标检测平台,不仅推动了技术进步,也为跨领域的实际应用铺平了道路。


安装:
# setup new evironment
conda create -n cubercnn python=3.8
source activate cubercnn# main dependencies
conda install -c fvcore -c iopath -c conda-forge -c pytorch3d -c pytorch fvcore iopath pytorch3d pytorch=1.8 torchvision=0.9.1 cudatoolkit=10.1# OpenCV, COCO, detectron2
pip install cython opencv-python
pip install 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
python -m pip install detectron2 -f https://dl.fbaipublicfiles.com/detectron2/wheels/cu101/torch1.8/index.html# other dependencies
conda install -c conda-forge scipy seaborn运行:
## for outdoor
python demo/demo.py \
--config-file ./configs/cubercnn_DLA34_FPN_out.yaml \
--input-folder "/home/spurs/dataset/2011_10_03/2011_10_03_drive_0047_sync/image_02/data" \
--threshold 0.25 --display \
MODEL.WEIGHTS ./cubercnn_DLA34_FPN_outdoor.pth \
OUTPUT_DIR output/demo## for indoor
python demo/demo.py \
--config-file ./configs/cubercnn_DLA34_FPN_in.yaml \
--input-folder "/home/spurs/dataset/2011_10_03/2011_10_03_drive_0047_sync/image_02/data" \
--threshold 0.25 --display \
MODEL.WEIGHTS ./cubercnn_DLA34_FPN_indoor.pth \
OUTPUT_DIR output/demo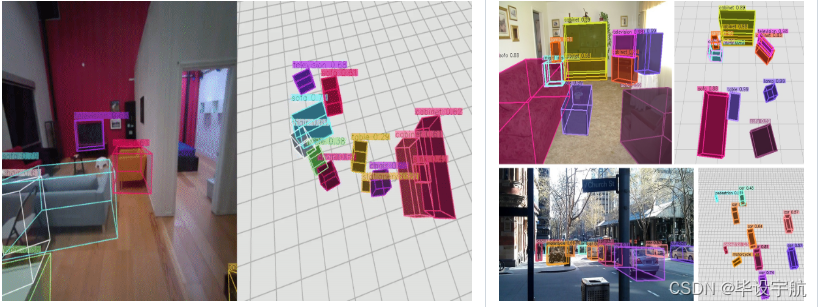
安装:
# setup new evironment
conda create -n cubercnn python=3.8
source activate cubercnn# main dependencies
conda install -c fvcore -c iopath -c conda-forge -c pytorch3d -c pytorch fvcore iopath pytorch3d pytorch=1.8 torchvision=0.9.1 cudatoolkit=10.1# OpenCV, COCO, detectron2
pip install cython opencv-python
pip install 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
python -m pip install detectron2 -f https://dl.fbaipublicfiles.com/detectron2/wheels/cu101/torch1.8/index.html# other dependencies
conda install -c conda-forge scipy seabornFor reference, we used and for our experiments. We expect that slight variations in versions are also compatible.cuda/10.1cudnn/v7.6.5.32\
示例:To run the Cube R-CNN demo on a folder of input images using our model trained on the full Omni3D dataset,DLA34
# Download example COCO images
sh demo/download_demo_COCO_images.sh# Run an example demo
python demo/demo.py \
--config-file cubercnn://omni3d/cubercnn_DLA34_FPN.yaml \
--input-folder "datasets/coco_examples" \
--threshold 0.25 --display \
MODEL.WEIGHTS cubercnn://omni3d/cubercnn_DLA34_FPN.pth \
OUTPUT_DIR output/demo We train on 48 GPUs using submitit which wraps the following training command,
python tools/train_net.py \--config-file configs/Base_Omni3D.yaml \OUTPUT_DIR output/omni3d_example_runNote that our provided configs specify hyperparameters tuned for 48 GPUs. You could train on 1 GPU (though with no guarantee of reaching the final performance) as follows,
python tools/train_net.py \--config-file configs/Base_Omni3D.yaml --num-gpus 1 \SOLVER.IMS_PER_BATCH 4 SOLVER.BASE_LR 0.0025 \SOLVER.MAX_ITER 5568000 SOLVER.STEPS (3340800, 4454400) \SOLVER.WARMUP_ITERS 174000 TEST.EVAL_PERIOD 1392000 \VIS_PERIOD 111360 OUTPUT_DIR output/omni3d_example_runThe evaluator relies on the detectron2 MetadataCatalog for keeping track of category names and contiguous IDs. Hence, it is important to set these variables appropriately.
# (list[str]) the category names in their contiguous order
MetadataCatalog.get('omni3d_model').thing_classes = ... # (dict[int: int]) the mapping from Omni3D category IDs to the contiguous order
MetadataCatalog.get('omni3d_model').thing_dataset_id_to_contiguous_id = ...In summary, the evaluator expects a list of image-level predictions in the format of:
{"image_id": <int> the unique image identifier from Omni3D,"K": <np.array> 3x3 intrinsics matrix for the image,"width": <int> image width,"height": <int> image height,"instances": [{"image_id": <int> the unique image identifier from Omni3D,"category_id": <int> the contiguous category prediction IDs, which can be mapped from Omni3D's category ID's usingMetadataCatalog.get('omni3d_model').thing_dataset_id_to_contiguous_id"bbox": [float] 2D box as [x1, y1, x2, y2] used for IoU2D,"score": <float> the confidence score for the object,"depth": <float> the depth of the center of the object,"bbox3D": list[list[float]] 8x3 corner vertices used for IoU3D,}...]
}Please use the following BibTeX entry if you use Omni3D and/or Cube R-CNN in your research or refer to our results.
@inproceedings{brazil2023omni3d,author = {Garrick Brazil and Abhinav Kumar and Julian Straub and Nikhila Ravi and Justin Johnson and Georgia Gkioxari},title = {{Omni3D}: A Large Benchmark and Model for {3D} Object Detection in the Wild},booktitle = {CVPR},address = {Vancouver, Canada},month = {June},year = {2023},organization = {IEEE},
}相关文章:
Omni3D目标检测
Omni3D是一个针对现实场景中的3D目标检测而构建的大型基准和模型体系。该项目旨在推动从单一图像中识别3D场景和物体的能力,这对于计算机视觉领域而言是一个长期的研究目标,并且在机器人、增强现实(AR)、虚拟现实(VR&a…...
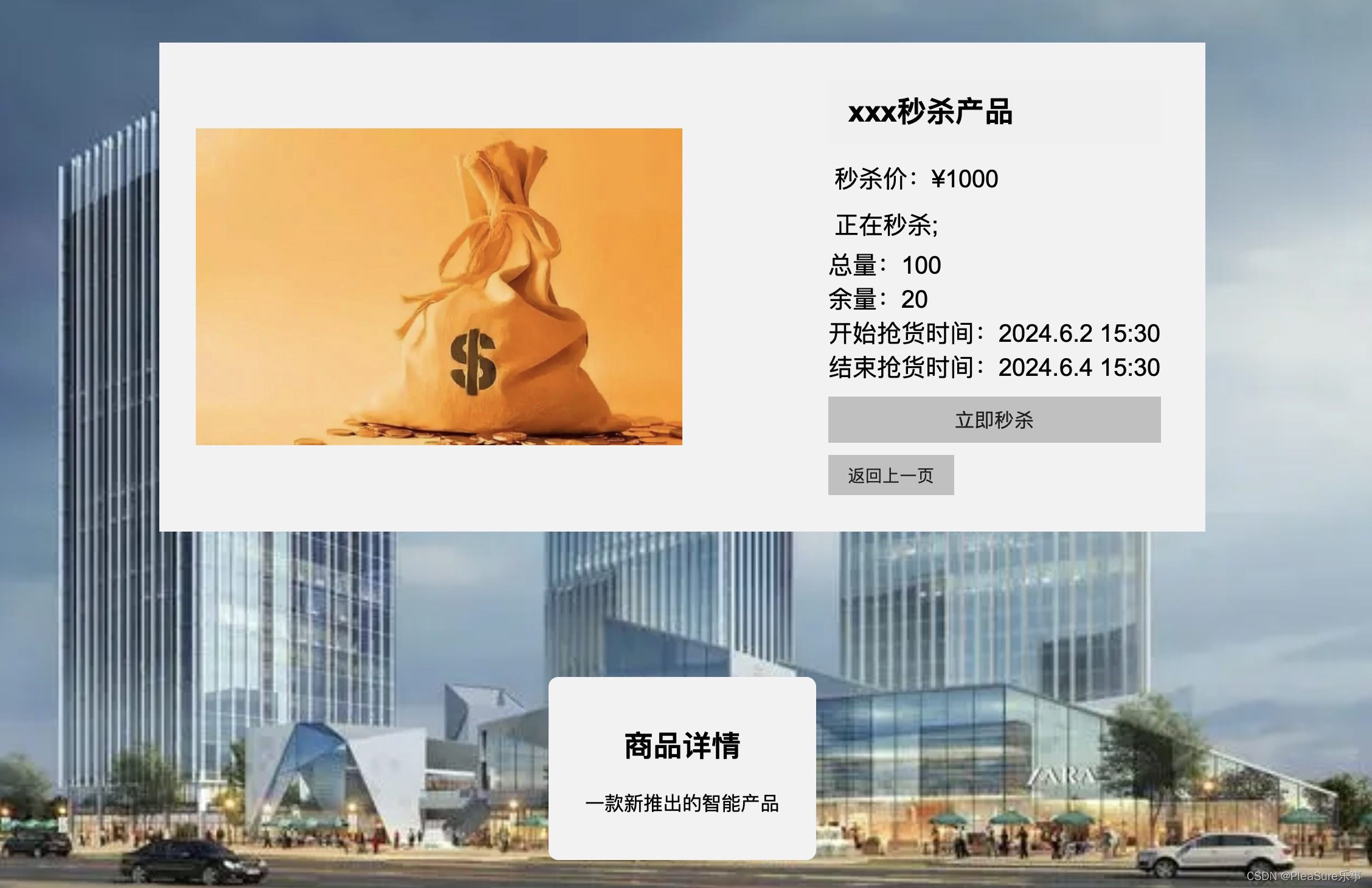
前端三件套开发模版——产品介绍页面
今天有空,使用前端三件套html、css、js制作了一个非常简单的产品制作页面,与大家分享,希望可以满足大家应急的需求。本页面可以对产品进行“抢购”、对产品进行介绍,同时可以安排一张产品的高清大图,我也加入了页面的背…...

Android Bitmap 和Drawable的区别
Bitmap 和 Drawable 是 Android 图形绘制的两种常用方式,它们有各自的特点和使用场景。下面将详细解释它们之间的区别,并通过示例代码说明如何使用它们。 Bitmap 解释 Bitmap 是一种用于存储图像像素数据的类,通常用于图像处理和操作。Bit…...

Linux和windows网络配置文件的修改
Linux和windows网络配置文件的修改 网络配置文件是计算机网络管理中至关重要的一部分。正确配置网络文件可以确保计算机与网络设备之间的通信顺畅,避免网络故障。本文将详细介绍网络配置文件的修改方法,包括常见命令、使用方法举例,以及一些…...

【.NET全栈】第16章 Web开发
文章目录 前言16.1 HTML概述16.1.1 HTML的基本概念16.1.2 HTML语言的基本元素16.1.3 格式设置16.1.4 超级链接16.1.5 图像16.1.6 表格16.1.7 框架16.1.8 表单 16.2 ASP.NET Web Forms的组织16.2.1 认识ASP.NET16.2.2 Web Forms的组织 16.3 Web服务器控件16.3.1 使用Label和Text…...
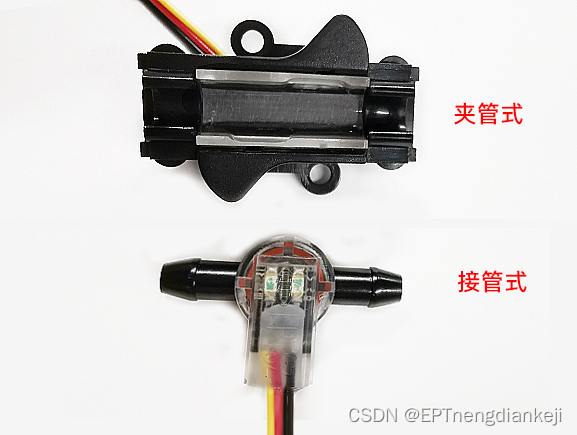
检测水管缺水的好帮手-管道光电液位传感器
管道光电液位传感器是现代清水管道管理中的重要技术创新,不仅提高了检测液位的精确度,还解决了传统机械式和电容式传感器存在的诸多问题,成为检测管道缺水的可靠利器。 该传感器采用先进的光学感应原理,利用红外光学组件通过精密…...

渗透测试流程基本八个步骤
渗透测试遵循软件测试的基本流程,但由于其测试过程与目标的特殊性,在具体实现步骤上渗透测试与常见软件测试并不相同。渗透测试流程主要包括8个步骤,如下图所示: 下面结合上图介绍每一个步骤所要完成的任务。 (1 )明确目标 当测…...

2024年移动手游趋势:休闲类手游收入逆势增长,欧美玩家成为主力
移动手游广告情报平台Sensor Tower近期发布的报告显示,从宏观数据来看,尽管2023年对于移动游戏市场来说是艰难的一年,无论是总下载量亦或是总收入都较去年有所下降,尤其是Google Play。但在总体下降的大趋势下,休闲游戏…...

npm 淘宝镜像证书过期,错误信息 Could not retrieve https://npm.taobao.org/mirrors/node/latest
更换 npm 证书 问题描述报错原因更换步骤1 找到 nvm 安装目录2 发现证书过期3 更换新地址4 保存后,重新安装成功 问题描述 在使用 nvm 安装新版本时,未成功,出现报错: Could not retrieve https://npm.taobao.org/mirrors/node/l…...

axios发送请求,后端无法获取cookie
1.前端 axios默认不携带cookie 添加如下代码 import axios from "axios" const requrst axios.create({baseURL: import.meta.env.VITE_APP_URL,timeout: 5000,}) //让axios携带cookie requrst.defaults.withCredentials true 2.后端nestjs main.ts app.enabl…...
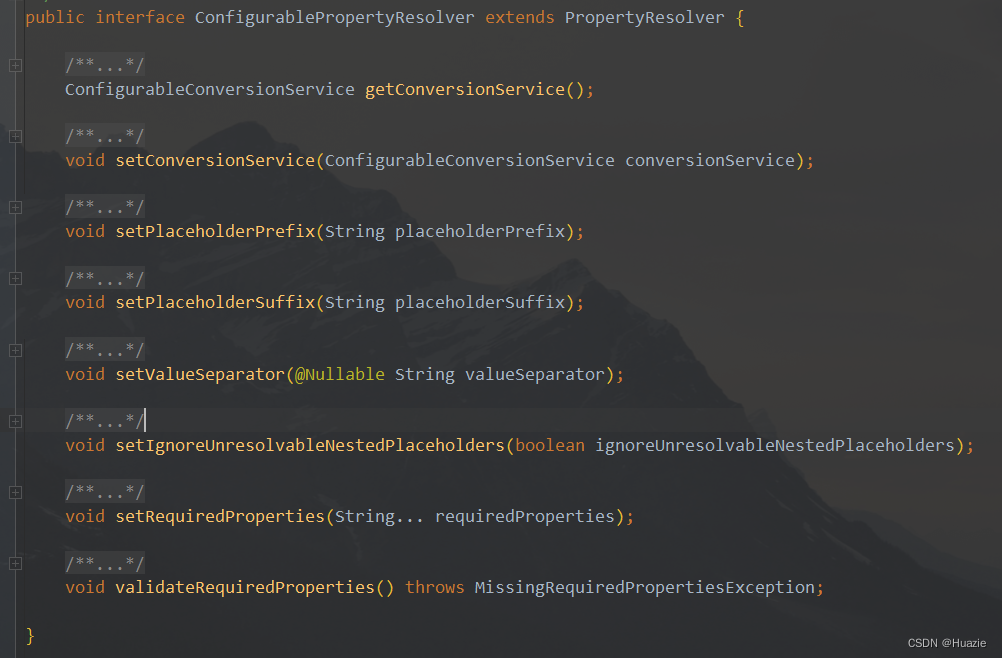
【Spring Boot 源码学习】初识 ConfigurableEnvironment
《Spring Boot 源码学习系列》 初识 ConfigurableEnvironment 一、引言二、主要内容2.1 Environment2.1.1 配置文件(profiles)2.1.2 属性(properties) 2.2 ConfigurablePropertyResolver2.2.1 属性类型转换配置2.2.2 占位符配置2.…...

开关电源中强制连续FCCM模式与轻载高效PSM,PFM模式优缺点对比笔记
文章目录 前言一、连续FCCM模式优点:缺点: 二,轻载高效PSM,PFM优点:缺点: 总结 前言 今天我们来学习下开关电源中,强制连续FCCM模式与轻载高效PSM,PFM模式优缺点对比 一、连续FCCM模式 优点: …...
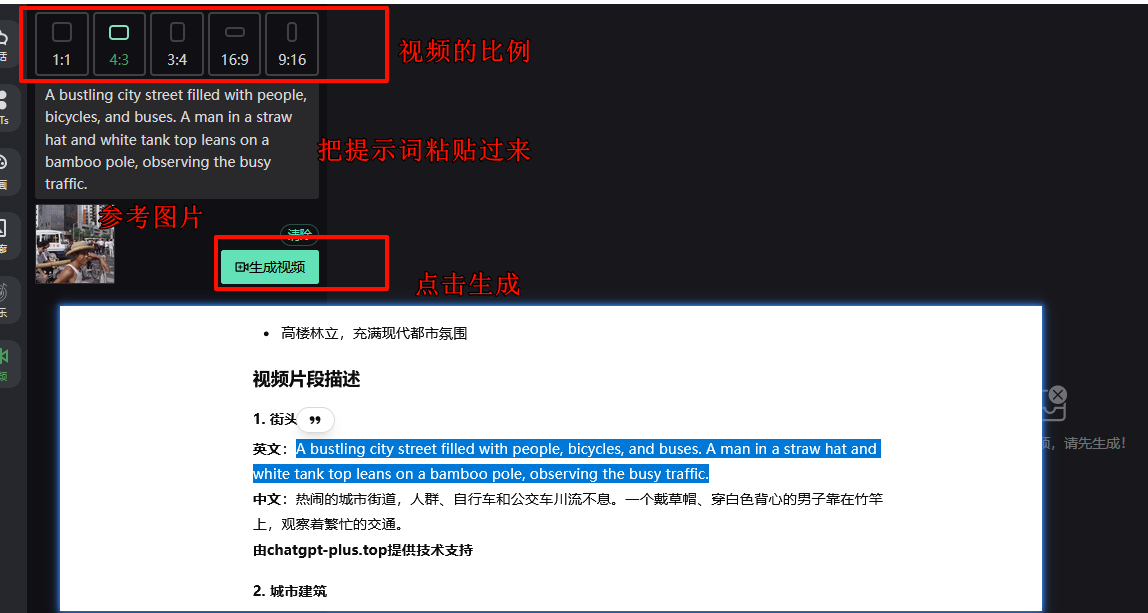
5分钟教你用AI把老照片动起来,别再去花49块9的冤枉钱了
文章目录 需要的工具 最近,AI视频在各大平台上,又火了。 只是火的形式,变成了将老照片动起来,打情感牌,或者做很多经典电视剧的再整活。 直接把可灵的生成时间,从以前的4分钟,生生的干成了20分钟…...

Ruby 环境变量
Ruby 环境变量 概述 环境变量在编程中扮演着重要的角色,尤其是在Ruby这样的动态编程语言中。它们是操作系统用来存储有关其操作环境的信息的变量,可以在程序运行时影响其行为。Ruby程序可以通过环境变量来获取配置信息、系统细节或用户特定的设置。本文将深入探讨Ruby中环境…...
认知)
BPF:BCC工具 funccount 统计内核函数调用(内核函数、跟踪点USDT探针)认知
写在前面 博文内容涉及BCC工具 funccount 认知funccount 可以帮助用户追踪和分析Linux系统上特定函数、系统探针或USDT探针的运行次数。这对于性能分析、故障排查和系统优化等场景非常有用。理解不足小伙伴帮忙指正 😃,生活加油 不必太纠结于当下,也不必…...

DPO算法推导
DPO 核心思想:直接使用偏好数据进行策略优化,省去 reward 模型策略优化。 技术背景知识: 首先给定prompt x,生成两个答案 ( y 1 , y 2 ) Π S F T ( y ∣ x ) (y_1,y_2)~\Pi^{SFT}(y|x) (y1,y2) ΠSFT(y∣x) ,并通…...
Qt源码分析:窗体绘制与响应
作为一套开源跨平台的UI代码库,窗体绘制与响应自然是最为基本的功能。在前面的博文中,已就Qt中的元对象系统(反射机制)、事件循环等基础内容进行了分析,并捎带阐述了窗体响应相关的内容。因此,本文着重分析Qt中窗体绘制相关的内容…...

docker 安装 禅道
docker pull hub.zentao.net/app/zentao:20.1.1 sudo docker network create --subnet172.172.172.0/24 zentaonet 使用 8087端口号访问 使用禅道mysql 映射到3307 sudo docker run \ --name zentao2 \ -p 8087:80 \ -p 3307:3306 \ --networkzentaonet \ --ip 172.172.172.…...

【简要说说】make 增量编译的原理
make 增量编译的原理 make是一个工具,它可以根据依赖关系和时间戳来自动执行编译命令。 当您修改了源代码文件后,make会检查它们的修改时间是否比目标文件(如可执行文件或目标文件)新,如果是,就会重新编译…...
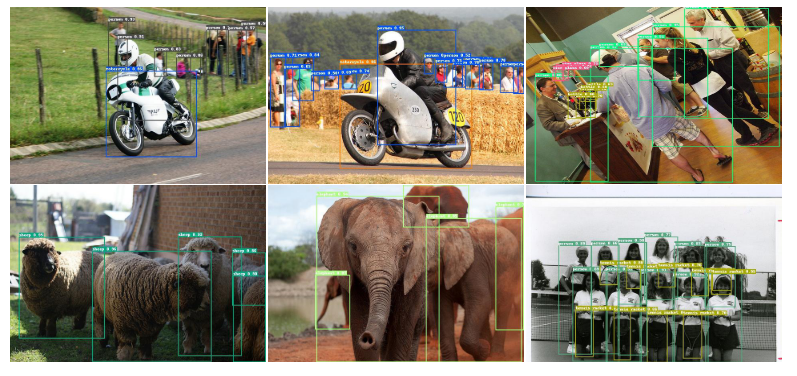
DETRs Beat YOLOs on Real-time Object Detection论文翻译
cvpr 2024 论文名称 DETRs在实时目标检测上击败YOLO 地址 https://arxiv.longhoe.net/abs/2304.08069 代码 https://github.com/lyuwenyu/RT-DETR 目录 摘要 1介绍 2.相关工作 2.1实时目标探测器 2.2.端到端物体探测器 3.检测器的端到端速度 3.1.NMS分析 3.2.端到端速度…...

Unity Il2CppDumper原理与实战:解析元数据与二进制对齐
1. 这不是“破解工具”,而是Unity开发者该懂的二进制真相课 你刚在Unity Asset Store下载了一个功能惊艳的插件,却在打包iOS后发现部分逻辑失效;或者接手一个没有源码的旧项目,只有一堆 .dll 和 .so 文件,连主入口…...

Office RibbonX Editor:让Office界面定制变得像搭积木一样简单
Office RibbonX Editor:让Office界面定制变得像搭积木一样简单 【免费下载链接】office-ribbonx-editor An overhauled fork of the original Custom UI Editor for Microsoft Office, built with WPF 项目地址: https://gitcode.com/gh_mirrors/of/office-ribbon…...
)
Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析)
更多请点击: https://intelliparadigm.com 第一章:Midjourney锐化效果失效真相(2024官方未公开的渲染管线瓶颈解析) 自2024年V6.2版本起,大量用户反馈 --stylize 与 --sharp 参数组合下图像边缘锐化效果显著弱化&am…...

基于雷达与光敏传感器的低功耗智能窗防设备设计与实现
1. 项目概述:一个基于雷达与光敏的智能窗防设备几年前,我因为一次短暂的出差,家里空置了几天,回来后就一直琢磨着怎么给家里的窗户加点“动静”。市面上的智能安防摄像头固然好,但要么需要复杂的布线,要么云…...

ComfyUI-Manager完整指南:如何轻松管理你的AI工作流扩展库
ComfyUI-Manager完整指南:如何轻松管理你的AI工作流扩展库 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable various c…...

终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词
终极歌词同步神器LRCGET:5分钟为你的音乐库添加完美歌词 【免费下载链接】lrcget Utility for mass-downloading LRC synced lyrics for your offline music library. 项目地址: https://gitcode.com/gh_mirrors/lr/lrcget 你是否厌倦了在听歌时手动搜索歌词…...

告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南
告别漫长等待:UE5.2.1 Windows打包效率优化与插件问题排查指南第一次点击"打包项目"按钮时,进度条仿佛被冻结的场景,每个UE5开发者都经历过。尤其当项目规模达到数十GB时,等待时间可能超过一小时——这背后隐藏着引擎底…...

Lovable电商网站搭建:如何用不到3人技术团队,72小时内上线PCI-DSS合规MVP版本?
更多请点击: https://codechina.net 第一章:Lovable电商网站搭建 Lovable 是一个面向中小商户的轻量级电商解决方案,采用现代 Web 技术栈构建,强调可扩展性、用户体验与快速部署能力。本章将指导你从零开始搭建一个具备商品展示、…...

基于EMA与轻量级机器学习的Wi-Fi链路质量预测实战
1. 项目概述与核心价值在工业自动化、仓储物流和智能制造等场景里,无线网络的稳定性正变得前所未有的重要。想象一下,一个自动导引运输车(AGV)正在执行物料搬运任务,或者一个机械臂正在与中央控制系统进行实时数据同步…...

3大技术突破:重新定义Switch游戏安装性能极限
3大技术突破:重新定义Switch游戏安装性能极限 【免费下载链接】Awoo-Installer A No-Bullshit NSP, NSZ, XCI, and XCZ Installer for Nintendo Switch 项目地址: https://gitcode.com/gh_mirrors/aw/Awoo-Installer Awoo Installer是一款专为破解版Nintendo…...