异步电路后端实现流程(cdc signOff 后端做什么)
一种后端异步电路的signOff流程
同步电路和异步电路分别signOff
对于同步电路,后端会分析sta setup/hold,这里不在赘述。在该scenario下 异步电路是不会分析,也不会关注异步电路之间的走线
在cdc scenario(mode)下sdc有一下设置:
将所有同名的clk之间的path都设为falsePath
该scenario下不检查同步电路的sta
对所有不同名的clk 做双向的max_delay检查
设 有clk_a,clk_b;周期分别为period_a和period_b,则两者之间最小的周期为period_min_ab,做一下max_delay检查
set period [expr ${period_min_ab} * ${cdc_ratio}];#normally, we can set cdc_ratio=0.7
set_max_delay -from clk_a to clk_b ${period} -ignore_clock_latency
set_max_delay -from clk_b to clk_a ${period} -ignore_clock_latency以上约束的含义就是 对所有a to b和b to a的clk做两者之间快时钟周期的0.7倍 max_delay检查。
因为这是异步时钟域的检查,所以可以ignore 所有的clk latency。
那么就有两个问题:
为什么要做max_delay的检查
如果有不同名字的clk 原本是同步时钟域 该怎么办
如果有异步电路不能满足0.7倍的fastclk maxDelay检查该怎么办?
带着这些问题我们进入下一节。
cdc maxDelay的原因及relax
任何异步处理有三方面需要考虑
一、防止或减少不定态的出现和传播
二、保证功能的正确性
三、保证性能不受损失
这里首先介绍异步处理的几种常见电路
2级或以上的寄存器打拍(下面就以2级为例)
寄存器打拍本身不能保证captureCLK的capture数据是正确的,只能降低不定态传播,要求同步器内和launchLCK的寄存器都尽量靠近
要保证功能正确,就要求被同步的数据是准静态或静态数据,也就是说在电路中 可以保证只有在launchCLK数据稳定后,captureCLK才会使用(而不是稳定后才capture)这个数据。
有效信号握手同步,数据不做同步
握手信号的同步首先就需要2级同步器,其次握手本身可以保证数据同步过去是正确的,但是前提条件是在握手过程中,被同步数据不能改变。
多bit数据信号在后端尽量相同的布线
另一方面考虑握手越快越好,那就要求launch FF 和capture FF间maxDelay不要过大
grayCode做指针同步的异步FIFO
grayCode同步是需要nbit的2级同步器,同时要求在captureCLK capture时最多只有1bit数据在变化,其他bit位全部稳定。比如虽然grayCode在launchCLK是最多一个clk变化1bit,但是如果前后两个launchCLK的2个bit的变化经过不同的delay同时到达了captureCLK,那么在captureCLK看到的就是两个bit同时变化,这样AsyncFIFO的虚空虚满就不正常,会出现fifo中的数据被错误覆盖或错误使用。
另一方面,考虑性能不受影响 需要合理的设置异步fifo的深度
现在的经验是如果里面的指针同步使用2级同步器,AsyncFifo深度设置为8,使用3级同步器,AsyncFifo的深度设置为10.在分析深度保证不断流的最差情况,是假设读写频率相同 相位差接近1个Tclk。有时间再开贴分析。
多bitgrayCode指针信号在后端尽量相同的布线
2.1为什么要做maxDelay检查
maxDelay检查的总体要求是launch FF 和 capture FF的距离不要太远,整个Tco+走线延迟+组合路径延迟小于maxDelay设置的period, 这样capture clk的一个时钟周期内能够采样到变化的数据。
maxDelay保证了格雷码同步的要求,即在captureCLK采样时,只有1个bit是不稳定的
假设grayCode从fastclk clk_a同步到slow clk_b,考虑最恶劣情况,在clk_a中连续两个时钟clk_a(n-1)和clk_a(n)时刻分别有2bit发生了变化,由于设置了maxDelay为fastCLk的0.7倍,那么在采样clk_a(n)的bit变化时,clk_a(n-1)的变化早就已经稳定了至少0.3period(clk_a)的时间。所以此时采样虽然有2bit变化,但clk_a(n-1)的变化已经稳定,实际上最多只有最新的bit变化可能没被正确采样,但是由于AsyncFiFo的虚空虚满特性并不影响功能实际并不会出错。
同理可分析grayCode从slow clk_b同步到fast clk_a的情况。可以得到相同的结论,在任意captureCLK采样时刻,只有1bit是不稳定的,即使在两个captureCLK之间有多个bit的变化。
2.2 如果有不同名字的clk 原本是同步时钟域 该怎么办
如果clk_a0和clk_a1原本是同步时钟域,在cdc check时因为clk name不同而做了maxDelay的检查,如过clk_a0和clk_a1之间的maxDelay检查不能满足,那就要relax这种类型的检查,可以直接设
clk_a0 to clk_a1和clk_a1 to clk_a0的path为falsePath。
如果maxdelay检查没有问题,就无需关注。
2.3 如果有异步电路不能满足0.7倍的fastclk maxDelay检查该怎么办?
0.7倍的fastCLK周期 约束是相当严格的,很多情况下并不能满足,这时我们具体电路具体分析:
对于2级同步寄存器
由于本来就是对准静态和静态的信号同步,信号基本没有变化,所以Launch FF到capture的FF并没有很严格的maxDelay需求,此时可以设置falsePath或者放宽该条path的maxDelay period。
regArray的asyncFIFO的数据存储阵列reg_data_array
在launch clk写数据到reg_data_array,当读端通过地址指针grayCode同步后发现reg_data_array上不空时,可以在capture直接采样reg_data_array的输出。
这里面可以看出来,grayCode同步到读端至少需要2个Tcaptureclk,所以对reg_data_array的maxdelay就可以放松至1.5T_capture,如果是3拍同步器可以放松至2T_capture.
一些握手同步
有效信号先在clk_a打了一拍,在经过2级同步器同步到clk_b,再在clk_b打一拍,后使用。那么对应的data可以设置maxDelay为1T_launch+2T_capture+1ns。
这种常用在apbSync,nic里面的bridge的addr和data上。可以根据实际电路对这些cell进行relax
如果grayCode不能满足0.7 maxdelay
这种情况下 只能靠后端来修timing,这个是必须meet的,否则grayCode就没有意义了。
相关文章:
)
异步电路后端实现流程(cdc signOff 后端做什么)
一种后端异步电路的signOff流程同步电路和异步电路分别signOff对于同步电路,后端会分析sta setup/hold,这里不在赘述。在该scenario下 异步电路是不会分析,也不会关注异步电路之间的走线在cdc scenario(mode)下sdc有一下设置:将所…...

Linux网络编程实战介绍
文章目录 前言一、Linux网络编程介绍二、文章目录总结前言 本专栏将为大家讲解Linux网络编程的知识,本专栏只需要有C语言基础即可学习,学习本专栏将大大提高你的C语言水平,当然了我也还会在ARM板子上进行实验将Linux驱动也和网络编程联系起来,方便大家去实现自己的项目。我…...

C++概述 课堂笔记
函数的重载在C语言中函数名是唯一的,不可以重复定义,当我们利用函数执行,功能相似的函数,我们也不能使用同一个函数,比如说,求整型的函数,不能用来求浮点型、字符型。在C中引入函数重载的概念&a…...

一文读懂SpringBoot整合Elasticsearch(一)
(本篇文章主要介绍Spring Boot如何整合Elasticsearch,包括基本配置、数据操作、搜索功能等方面。) 一、前言 Elasticsearch是一款全文搜索引擎,可用于快速、准确地存储、搜索和分析大量数据。而Spring Boot是一款快速开发框架&a…...
(枚举)(前缀和)1230. K倍区间)
(数论)(枚举)(前缀和)1230. K倍区间
目录 题目链接 一些话 切入点 流程 套路 ac代码 题目链接 1230. K倍区间 - AcWing题库 ~数~啦!我草,又~在~水~字~数~啦!我草,又~在~水&…...

万字带你深入理解 Linux 虚拟内存管理(下)
接上文:万字带你深入理解 Linux 虚拟内存管理(上) 6. 程序编译后的二进制文件如何映射到虚拟内存空间中 经过前边这么多小节的内容介绍,现在我们已经熟悉了进程虚拟内存空间的布局,以及内核如何管理这些虚拟内存区域&…...

【iOS】—— JSONModel源码学习
JSONModel 文章目录JSONModel关于JSONModel的用法initWithDictionary等方法load方法实现load方法调用时机init方法__setup__方法__inspectProperties:方法__doesDictionary方法__importDictionary方法关于JSONModel的用法 可以参考之前写的博客:【iOS】—— JSONMo…...

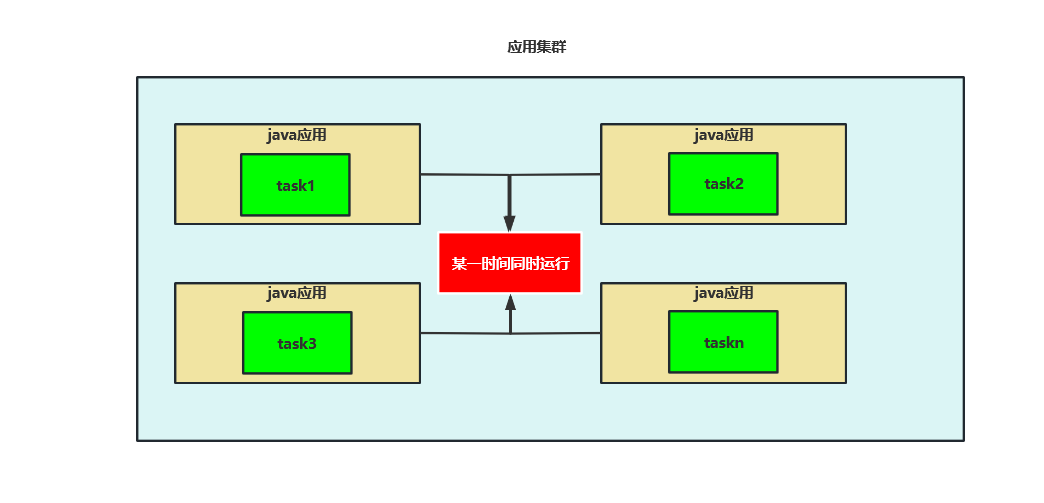
单片机怎么实现真正的多线程?
所谓多线程都是模拟的,本质都是单线程,因为cpu同一时刻只能执行一段代码。模拟的多线程就是任务之间快速切换,看起来像同时执行的样子。据说最近有多核的单片机,不过成本应该会高很多。对于模拟的多线程,我知道的有两种…...

【LeetCode】剑指 Offer(23)
目录 题目:剑指 Offer 46. 把数字翻译成字符串 - 力扣(Leetcode) 题目的接口: 解题思路: 代码: 过啦!!! 写在最后: 题目:剑指 Offer 46. 把…...

[免费专栏] 汽车威胁狩猎之不应该相信的几个威胁狩猎误区
也许每个人出生的时候都以为这世界都是为他一个人而存在的,当他发现自己错的时候,他便开始长大 少走了弯路,也就错过了风景,无论如何,感谢经历 汽车威胁狩猎专栏长期更新,本篇最新内容请前往: …...

LinuxFTP文件传输服务和DNS域名解析服务
♥️作者:小刘在C站 ♥️个人主页:小刘主页 ♥️每天分享云计算网络运维课堂笔记,努力不一定有收获,但一定会有收获加油!一起努力,共赴美好人生! ♥️夕阳下,是最美的绽放࿰…...

二叉搜索树原理及底层实现
二叉搜索树BST 概念 二叉搜索树又称二叉排序树,它可以是一棵空树,或者是具有以下性质的二叉树:若它的左子树不为空,则左子树上所有节点的值都小于根节点的值;若它的右子树不为空,则右子树上所有节点的值都…...
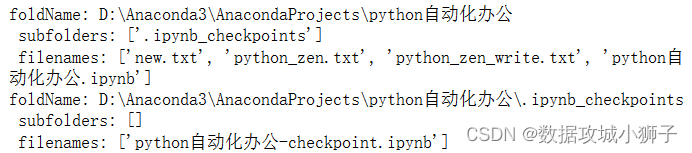
python自动化办公(一)
本文代码参考其他教程书籍实现。 文章目录文件读写open函数读取文本文件写入文本文件文件和目录操作使用os库使用shutil库文件读写 open函数 open函数有8个参数,常用前4个,除了file参数外,其他参数都有默认值。file指定了要打开的文件名称&a…...

LeetCode - 198 打家劫舍
目录 题目来源 题目描述 示例 提示 题目解析 算法源码 题目来源 198. 打家劫舍 - 力扣(LeetCode) 题目描述 你是一个专业的小偷,计划偷窃沿街的房屋。每间房内都藏有一定的现金,影响你偷窃的唯一制约因素就是相邻的房屋装…...
简单粗暴的分布式定时任务解决方案
分布式定时任务1.为什么需要定时任务?2.数据库实现分布式定时任务3.基于redis实现1.为什么需要定时任务? 因为有时候我们需要定时的执行一些操作,比如业务中产生的一些临时文件,临时文件不能立即删除,因为不清楚用户是…...

蓝桥杯第五天刷题
第一题:数的分解题目描述本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。把 2019 分解成 3 个各不相同的正整数之和,并且要求每个正整数都不包含数字 2和 4,一共有多少种不同的分解方法&…...
Java数组的定义和使用(万字详解)
目录 编辑 一. 数组的基本概念 1、什么是数组 2、数组的创建及初始化 1、数组的创建 2、数组的初始化 3、数组的使用 (1)数组中元素访问 (3)遍历数组 二、数组是引用类型 1、初始JVM的内存分布 2、基本类型变量与引用类…...
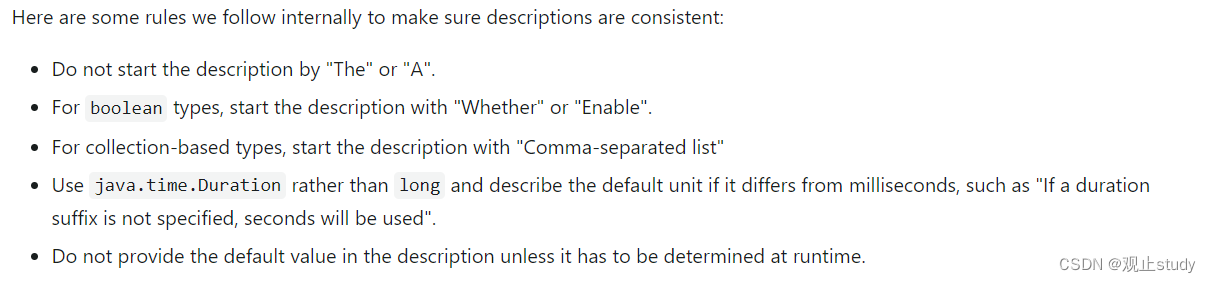
【SpringBoot】自定义Starter
🚩本文已收录至专栏:Spring家族学习之旅 👍希望您能有所收获 一.概述 在使用SpringBoot进行开发的时候,我们发现使用很多技术都是直接导入对应的starter,然后就实现了springboot整合对应技术,再加上一些简…...
【C陷阱与缺陷】----语法陷阱
💯💯💯 要理解一个C程序,必须理解这些程序是如何组成声明,表达式,语句的。虽然现在对C的语法定义很完善,几乎无懈可击,大门有时这些定义与人们的直觉相悖,或容易引起混淆…...

虹科分享| 关于TrueNAS十问十答
上一篇文章我们向您介绍了虹科新品HK-TrueNAS企业存储,很多小伙伴会疑问到底什么是NAS存储,之前常用的磁盘、磁带属于什么存储架构,NAS存储好在哪里,什么时候使用NAS?今天我们整理了关于TrueNAS的十问十答,…...

Windows Defender Remover终极指南:高效移除Windows安全防护的完整解决方案
Windows Defender Remover终极指南:高效移除Windows安全防护的完整解决方案 【免费下载链接】windows-defender-remover A tool which is uses to remove Windows Defender in Windows 8.x, Windows 10 (every version) and Windows 11. 项目地址: https://gitcod…...

FanControl终极指南:Windows风扇智能控制完全手册
FanControl终极指南:Windows风扇智能控制完全手册 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/Fan…...

Zotero Connector进阶指南:解锁知乎内容完整抓取与Snapshot模式精准切换
1. 为什么你的知乎内容总是只保存快照? 很多初次使用Zotero Connector抓取知乎内容的朋友都会遇到一个头疼的问题:明明想保存完整的文章内容,结果在Zotero里只能看到一个网页快照。这个问题其实和Zotero Connector的默认设置有关。Zotero Co…...

Zotero茉莉花插件:3大核心功能彻底解决中文文献管理难题
Zotero茉莉花插件:3大核心功能彻底解决中文文献管理难题 【免费下载链接】jasminum A Zotero add-on to retrive CNKI meta data. 一个简单的Zotero 插件,用于识别中文元数据 项目地址: https://gitcode.com/gh_mirrors/ja/jasminum 还在为Zotero…...

爱快路由器下搞定水星AC跨三层管理AP:一个Option字段引发的抓包实战
爱快路由器下搞定水星AC跨三层管理AP:一个Option字段引发的抓包实战 当企业网络规模扩大,跨三层管理无线AP成为刚需。最近在帮客户部署水星(Mercury)无线AC控制器时,遇到了一个看似简单却耗费数小时才解决的"坑&q…...

终极指南:如何5分钟搞定B站字幕提取与格式转换
终极指南:如何5分钟搞定B站字幕提取与格式转换 【免费下载链接】BiliBiliCCSubtitle 一个用于下载B站(哔哩哔哩)CC字幕及转换的工具; 项目地址: https://gitcode.com/gh_mirrors/bi/BiliBiliCCSubtitle 你是否曾为保存B站视频中的精彩内容而烦恼?…...

视频转文字软件免费的哪个最好用?2026年免费视频转文字软件对比指南
截至 2026 年,处理视频转文字需求的工具大致分为三类:桌面软件、在线网页版、微信小程序。不同类型的选择往往取决于你习惯的使用场景——有人倾向装软件后离线处理,有人则更喜欢打开就用不用卸载的方案。本文会重点拆解一款叫提词匠的微信小…...

PostgreSQL数据清洗实战:用string_agg合并地址字段,我这样整理混乱的客户信息
PostgreSQL数据清洗实战:用string_agg合并地址字段,我这样整理混乱的客户信息 客户信息表中的地址字段分散是个常见痛点。想象一下:同一客户的"省"、"市"、"详细地址"分散在不同行,导出Excel时地址…...
:MySQL 持久化与 Redis 缓存机制源码解析)
DAG账本项目学习总结(七):MySQL 持久化与 Redis 缓存机制源码解析
1. 上期回顾在第六期中,我们分析了云端广播与交易确认机制。可以简单概括为:融合终端生成交易↓ 写入本地 DAG 账本↓ 广播给 cloud 和其他 fusion↓ cloud 插入全局账本↓ cloud 根据累计权重产生确认动作↓ 确认动作同步回各融合终端到这里为止&#x…...

AI智能体集成Active Directory:统一身份管理与安全沙箱实践
1. 项目概述:在Active Directory中为AI智能体安家最近在折腾一个挺有意思的项目,叫agent-directory。简单来说,它能让你的AI智能体(Agent)像公司里的员工一样,在Windows Active Directory(AD&am…...