万字带你深入理解 Linux 虚拟内存管理(下)
接上文:万字带你深入理解 Linux 虚拟内存管理(上)
6. 程序编译后的二进制文件如何映射到虚拟内存空间中
经过前边这么多小节的内容介绍,现在我们已经熟悉了进程虚拟内存空间的布局,以及内核如何管理这些虚拟内存区域,并对进程的虚拟内存空间有了一个完整全面的认识。
现在我们再来回到最初的起点,进程的虚拟内存空间 mm_struct 以及这些虚拟内存区域 vm_area_struct 是如何被创建并初始化的呢?

在 《3. 进程虚拟内存空间》小节中,我们介绍进程的虚拟内存空间时提到,我们写的程序代码编译之后会生成一个 ELF 格式的二进制文件,这个二进制文件中包含了程序运行时所需要的元信息,比如程序的机器码,程序中的全局变量以及静态变量等。
这个 ELF 格式的二进制文件中的布局和我们前边讲的虚拟内存空间中的布局类似,也是一段一段的,每一段包含了不同的元数据。
磁盘文件中的段我们叫做 Section,内存中的段我们叫做 Segment,也就是内存区域。
磁盘文件中的这些 Section 会在进程运行之前加载到内存中并映射到内存中的 Segment。通常是多个 Section 映射到一个 Segment。
比如磁盘文件中的 .text,.rodata 等一些只读的 Section,会被映射到内存的一个只读可执行的 Segment 里(代码段)。而 .data,.bss 等一些可读写的 Section,则会被映射到内存的一个具有读写权限的 Segment 里(数据段,BSS 段)。
那么这些 ELF 格式的二进制文件中的 Section 是如何加载并映射进虚拟内存空间的呢?
内核中完成这个映射过程的函数是 load_elf_binary ,这个函数的作用很大,加载内核的是它,启动第一个用户态进程 init 的是它,fork 完了以后,调用 exec 运行一个二进制程序的也是它。当 exec 运行一个二进制程序的时候,除了解析 ELF 的格式之外,另外一个重要的事情就是建立上述提到的内存映射。
static int load_elf_binary(struct linux_binprm *bprm)
{...... 省略 ........// 设置虚拟内存空间中的内存映射区域起始地址 mmap_basesetup_new_exec(bprm);...... 省略 ........// 创建并初始化栈对应的 vm_area_struct 结构。// 设置 mm->start_stack 就是栈的起始地址也就是栈底,并将 mm->arg_start 是指向栈底的。retval = setup_arg_pages(bprm, randomize_stack_top(STACK_TOP),executable_stack);...... 省略 ........// 将二进制文件中的代码部分映射到虚拟内存空间中error = elf_map(bprm->file, load_bias + vaddr, elf_ppnt,elf_prot, elf_flags, total_size);...... 省略 ........// 创建并初始化堆对应的的 vm_area_struct 结构// 设置 current->mm->start_brk = current->mm->brk,设置堆的起始地址 start_brk,结束地址 brk。 起初两者相等表示堆是空的retval = set_brk(elf_bss, elf_brk, bss_prot);...... 省略 ........// 将进程依赖的动态链接库 .so 文件映射到虚拟内存空间中的内存映射区域elf_entry = load_elf_interp(&loc->interp_elf_ex,interpreter,&interp_map_addr,load_bias, interp_elf_phdata);...... 省略 ........// 初始化内存描述符 mm_structcurrent->mm->end_code = end_code;current->mm->start_code = start_code;current->mm->start_data = start_data;current->mm->end_data = end_data;current->mm->start_stack = bprm->p;...... 省略 ........
}- setup_new_exec 设置虚拟内存空间中的内存映射区域起始地址 mmap_base
- setup_arg_pages 创建并初始化栈对应的 vm_area_struct 结构。置 mm->start_stack 就是栈的起始地址也就是栈底,并将 mm->arg_start 是指向栈底的。
- elf_map 将 ELF 格式的二进制文件中.text ,.data,.bss 部分映射到虚拟内存空间中的代码段,数据段,BSS 段中。
- set_brk 创建并初始化堆对应的的 vm_area_struct 结构,设置 current->mm->start_brk = current->mm->brk,设置堆的起始地址 start_brk,结束地址 brk。 起初两者相等表示堆是空的。
- load_elf_interp 将进程依赖的动态链接库 .so 文件映射到虚拟内存空间中的内存映射区域
- 初始化内存描述符 mm_struct
7. 内核虚拟内存空间
现在我们已经知道了进程虚拟内存空间在内核中的布局以及管理,那么内核态的虚拟内存空间又是什么样子的呢?本小节笔者就带大家来一层一层地拆开这个黑盒子。
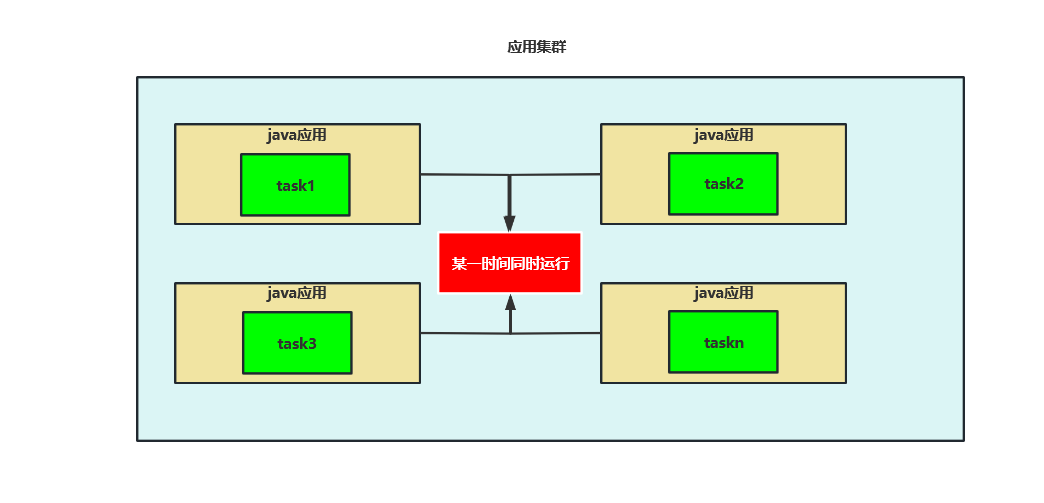
之前在介绍进程虚拟内存空间的时候,笔者提到不同进程之间的虚拟内存空间是相互隔离的,彼此之间相互独立,相互感知不到其他进程的存在。使得进程以为自己拥有所有的内存资源。

而内核态虚拟内存空间是所有进程共享的,不同进程进入内核态之后看到的虚拟内存空间全部是一样的。
什么意思呢?比如上图中的进程 a,进程 b,进程 c 分别在各自的用户态虚拟内存空间中访问虚拟地址 x 。由于进程之间的用户态虚拟内存空间是相互隔离相互独立的,虽然在进程a,进程b,进程c 访问的都是虚拟地址 x 但是看到的内容却是不一样的(背后可能映射到不同的物理内存中)。
但是当进程 a,进程 b,进程 c 进入到内核态之后情况就不一样了,由于内核虚拟内存空间是各个进程共享的,所以它们在内核空间中看到的内容全部是一样的,比如进程 a,进程 b,进程 c 在内核态都去访问虚拟地址 y。这时它们看到的内容就是一样的了。
这里笔者和大家澄清一个经常被误解的概念:由于内核会涉及到物理内存的管理,所以很多人会想当然地认为只要进入了内核态就开始使用物理地址了,这就大错特错了,千万不要这样理解,进程进入内核态之后使用的仍然是虚拟内存地址,只不过在内核中使用的虚拟内存地址被限制在了内核态虚拟内存空间范围中,这也是本小节笔者要为大家介绍的主题。
在清楚了这个基本概念之后,下面笔者分别从 32 位体系 和 64 位体系下为大家介绍内核态虚拟内存空间的布局。
7.1 32 位体系内核虚拟内存空间布局
在前边《5.1 内核如何划分用户态和内核态虚拟内存空间》小节中我们提到,内核在 /arch/x86/include/asm/page_32_types.h 文件中通过 TASK_SIZE 将进程虚拟内存空间和内核虚拟内存空间分割开来。
/** User space process size: 3GB (default).*/
#define TASK_SIZE __PAGE_OFFSET__PAGE_OFFSET 的值在 32 位系统下为 0xC000 000

在 32 位体系结构下进程用户态虚拟内存空间为 3 GB,虚拟内存地址范围为:0x0000 0000 - 0xC000 000 。内核态虚拟内存空间为 1 GB,虚拟内存地址范围为:0xC000 000 - 0xFFFF FFFF。
本小节我们主要关注 0xC000 000 - 0xFFFF FFFF 这段虚拟内存地址区域也就是内核虚拟内存空间的布局情况。
资料直通车:Linux内核源码技术学习路线+视频教程内核源码
学习直通车:Linux内核源码内存调优文件系统进程管理设备驱动/网络协议栈
7.1.1 直接映射区
在总共大小 1G 的内核虚拟内存空间中,位于最前边有一块 896M 大小的区域,我们称之为直接映射区或者线性映射区,地址范围为 3G -- 3G + 896m 。
之所以这块 896M 大小的区域称为直接映射区或者线性映射区,是因为这块连续的虚拟内存地址会映射到 0 - 896M 这块连续的物理内存上。
也就是说 3G -- 3G + 896m 这块 896M 大小的虚拟内存会直接映射到 0 - 896M 这块 896M 大小的物理内存上,这块区域中的虚拟内存地址直接减去 0xC000 0000 (3G) 就得到了物理内存地址 。所以我们称这块区域为直接映射区。
为了方便为大家解释,我们假设现在机器上的物理内存为 4G 大小

虽然这块区域中的虚拟地址是直接映射到物理地址上,但是内核在访问这段区域的时候还是走的虚拟内存地址,内核也会为这块空间建立映射页表。关于页表的概念笔者后续会为大家详细讲解,这里大家只需要简单理解为页表保存了虚拟地址到物理地址的映射关系即可。
大家这里只需要记得内核态虚拟内存空间的前 896M 区域是直接映射到物理内存中的前 896M 区域中的,直接映射区中的映射关系是一比一映射。映射关系是固定的不会改变 。
明白了这个关系之后,我们接下来就看一下这块直接映射区域在物理内存中究竟存的是什么内容~~~
在这段 896M 大小的物理内存中,前 1M 已经在系统启动的时候被系统占用,1M 之后的物理内存存放的是内核代码段,数据段,BSS 段(这些信息起初存放在 ELF格式的二进制文件中,在系统启动的时候被加载进内存)。
我们可以通过 cat /proc/iomem 命令查看具体物理内存布局情况。
当我们使用 fork 系统调用创建进程的时候,内核会创建一系列进程相关的描述符,比如之前提到的进程的核心数据结构 task_struct,进程的内存空间描述符 mm_struct,以及虚拟内存区域描述符 vm_area_struct 等。
这些进程相关的数据结构也会存放在物理内存前 896M 的这段区域中,当然也会被直接映射至内核态虚拟内存空间中的 3G -- 3G + 896m 这段直接映射区域中。

当进程被创建完毕之后,在内核运行的过程中,会涉及内核栈的分配,内核会为每个进程分配一个固定大小的内核栈(一般是两个页大小,依赖具体的体系结构),每个进程的整个调用链必须放在自己的内核栈中,内核栈也是分配在直接映射区。
与进程用户空间中的栈不同的是,内核栈容量小而且是固定的,用户空间中的栈容量大而且可以动态扩展。内核栈的溢出危害非常巨大,它会直接悄无声息的覆盖相邻内存区域中的数据,破坏数据。
通过以上内容的介绍我们了解到内核虚拟内存空间最前边的这段 896M 大小的直接映射区如何与物理内存进行映射关联,并且清楚了直接映射区主要用来存放哪些内容。
写到这里,笔者觉得还是有必要再次从功能划分的角度为大家介绍下这块直接映射区域。
我们都知道内核对物理内存的管理都是以页为最小单位来管理的,每页默认 4K 大小,理想状况下任何种类的数据页都可以存放在任何页框中,没有什么限制。比如:存放内核数据,用户数据,缓冲磁盘数据等。
但是实际的计算机体系结构受到硬件方面的限制制约,间接导致限制了页框的使用方式。
比如在 X86 体系结构下,ISA 总线的 DMA (直接内存存取)控制器,只能对内存的前16M 进行寻址,这就导致了 ISA 设备不能在整个 32 位地址空间中执行 DMA,只能使用物理内存的前 16M 进行 DMA 操作。
因此直接映射区的前 16M 专门让内核用来为 DMA 分配内存,这块 16M 大小的内存区域我们称之为 ZONE_DMA。
用于 DMA 的内存必须从 ZONE_DMA 区域中分配。
而直接映射区中剩下的部分也就是从 16M 到 896M(不包含 896M)这段区域,我们称之为 ZONE_NORMAL。从字面意义上我们可以了解到,这块区域包含的就是正常的页框(使用没有任何限制)。
ZONE_NORMAL 由于也是属于直接映射区的一部分,对应的物理内存 16M 到 896M 这段区域也是被直接映射至内核态虚拟内存空间中的 3G + 16M 到 3G + 896M 这段虚拟内存上。

注意这里的 ZONE_DMA 和 ZONE_NORMAL 是内核针对物理内存区域的划分。
现在物理内存中的前 896M 的区域也就是前边介绍的 ZONE_DMA 和 ZONE_NORMAL 区域到内核虚拟内存空间的映射笔者就为大家介绍完了,它们都是采用直接映射的方式,一比一就行映射。
7.1.2 ZONE_HIGHMEM 高端内存
而物理内存 896M 以上的区域被内核划分为 ZONE_HIGHMEM 区域,我们称之为高端内存。
本例中我们的物理内存假设为 4G,高端内存区域为 4G - 896M = 3200M,那么这块 3200M 大小的 ZONE_HIGHMEM 区域该如何映射到内核虚拟内存空间中呢?
由于内核虚拟内存空间中的前 896M 虚拟内存已经被直接映射区所占用,而在 32 体系结构下内核虚拟内存空间总共也就 1G 的大小,这样一来内核剩余可用的虚拟内存空间就变为了 1G - 896M = 128M。
显然物理内存中 3200M 大小的 ZONE_HIGHMEM 区域无法继续通过直接映射的方式映射到这 128M 大小的虚拟内存空间中。
这样一来物理内存中的 ZONE_HIGHMEM 区域就只能采用动态映射的方式映射到 128M 大小的内核虚拟内存空间中,也就是说只能动态的一部分一部分的分批映射,先映射正在使用的这部分,使用完毕解除映射,接着映射其他部分。
知道了 ZONE_HIGHMEM 区域的映射原理,我们接着往下看这 128M 大小的内核虚拟内存空间究竟是如何布局的?

内核虚拟内存空间中的 3G + 896M 这块地址在内核中定义为 high_memory,high_memory 往上有一段 8M 大小的内存空洞。空洞范围为:high_memory 到 VMALLOC_START 。
VMALLOC_START 定义在内核源码 /arch/x86/include/asm/pgtable_32_areas.h 文件中:
#define VMALLOC_OFFSET (8 * 1024 * 1024)#define VMALLOC_START ((unsigned long)high_memory + VMALLOC_OFFSET)7.1.3 vmalloc 动态映射区
接下来 VMALLOC_START 到 VMALLOC_END 之间的这块区域成为动态映射区。采用动态映射的方式映射物理内存中的高端内存。
#ifdef CONFIG_HIGHMEM
# define VMALLOC_END (PKMAP_BASE - 2 * PAGE_SIZE)
#else
# define VMALLOC_END (LDT_BASE_ADDR - 2 * PAGE_SIZE)
#endif
和用户态进程使用 malloc 申请内存一样,在这块动态映射区内核是使用 vmalloc 进行内存分配。由于之前介绍的动态映射的原因,vmalloc 分配的内存在虚拟内存上是连续的,但是物理内存是不连续的。通过页表来建立物理内存与虚拟内存之间的映射关系,从而可以将不连续的物理内存映射到连续的虚拟内存上。
由于 vmalloc 获得的物理内存页是不连续的,因此它只能将这些物理内存页一个一个地进行映射,在性能开销上会比直接映射大得多。
关于 vmalloc 分配内存的相关实现原理,笔者会在后面的文章中为大家讲解,这里大家只需要明白它在哪块虚拟内存区域中活动即可。
7.1.4 永久映射区

而在 PKMAP_BASE 到 FIXADDR_START 之间的这段空间称为永久映射区。在内核的这段虚拟地址空间中允许建立与物理高端内存的长期映射关系。比如内核通过 alloc_pages() 函数在物理内存的高端内存中申请获取到的物理内存页,这些物理内存页可以通过调用 kmap 映射到永久映射区中。
LAST_PKMAP 表示永久映射区可以映射的页数限制。
#define PKMAP_BASE \((LDT_BASE_ADDR - PAGE_SIZE) & PMD_MASK)#define LAST_PKMAP 10248.1.5 固定映射区

内核虚拟内存空间中的下一个区域为固定映射区,区域范围为:FIXADDR_START 到 FIXADDR_TOP。
FIXADDR_START 和 FIXADDR_TOP 定义在内核源码 /arch/x86/include/asm/fixmap.h 文件中:
#define FIXADDR_START (FIXADDR_TOP - FIXADDR_SIZE)extern unsigned long __FIXADDR_TOP; // 0xFFFF F000
#define FIXADDR_TOP ((unsigned long)__FIXADDR_TOP)在内核虚拟内存空间的直接映射区中,直接映射区中的虚拟内存地址与物理内存前 896M 的空间的映射关系都是预设好的,一比一映射。
在固定映射区中的虚拟内存地址可以自由映射到物理内存的高端地址上,但是与动态映射区以及永久映射区不同的是,在固定映射区中虚拟地址是固定的,而被映射的物理地址是可以改变的。也就是说,有些虚拟地址在编译的时候就固定下来了,是在内核启动过程中被确定的,而这些虚拟地址对应的物理地址不是固定的。采用固定虚拟地址的好处是它相当于一个指针常量(常量的值在编译时确定),指向物理地址,如果虚拟地址不固定,则相当于一个指针变量。
那为什么会有固定映射这个概念呢 ? 比如:在内核的启动过程中,有些模块需要使用虚拟内存并映射到指定的物理地址上,而且这些模块也没有办法等待完整的内存管理模块初始化之后再进行地址映射。因此,内核固定分配了一些虚拟地址,这些地址有固定的用途,使用该地址的模块在初始化的时候,将这些固定分配的虚拟地址映射到指定的物理地址上去。
7.1.6 临时映射区
在内核虚拟内存空间中的最后一块区域为临时映射区,那么这块临时映射区是用来干什么的呢?

在之前文章 《从 Linux 内核角度探秘 JDK NIO 文件读写本质》 的 “ 12.3 iov_iter_copy_from_user_atomic ” 小节中介绍在 Buffered IO 模式下进行文件写入的时候,在下图中的第四步,内核会调用 iov_iter_copy_from_user_atomic 函数将用户空间缓冲区 DirectByteBuffer 中的待写入数据拷贝到 page cache 中。

但是内核又不能直接进行拷贝,因为此时从 page cache 中取出的缓存页 page 是物理地址,而在内核中是不能够直接操作物理地址的,只能操作虚拟地址。
那怎么办呢?所以就需要使用 kmap_atomic 将缓存页临时映射到内核空间的一段虚拟地址上,这段虚拟地址就位于内核虚拟内存空间中的临时映射区上,然后将用户空间缓存区 DirectByteBuffer 中的待写入数据通过这段映射的虚拟地址拷贝到 page cache 中的相应缓存页中。这时文件的写入操作就已经完成了。
由于是临时映射,所以在拷贝完成之后,调用 kunmap_atomic 将这段映射再解除掉。
size_t iov_iter_copy_from_user_atomic(struct page *page,struct iov_iter *i, unsigned long offset, size_t bytes)
{// 将缓存页临时映射到内核虚拟地址空间的临时映射区中char *kaddr = kmap_atomic(page), *p = kaddr + offset;// 将用户缓存区 DirectByteBuffer 中的待写入数据拷贝到文件缓存页中iterate_all_kinds(i, bytes, v,copyin((p += v.iov_len) - v.iov_len, v.iov_base, v.iov_len),memcpy_from_page((p += v.bv_len) - v.bv_len, v.bv_page,v.bv_offset, v.bv_len),memcpy((p += v.iov_len) - v.iov_len, v.iov_base, v.iov_len))// 解除内核虚拟地址空间与缓存页之间的临时映射,这里映射只是为了临时拷贝数据用kunmap_atomic(kaddr);return bytes;
}7.1.7 32位体系结构下 Linux 虚拟内存空间整体布局
到现在为止,整个内核虚拟内存空间在 32 位体系下的布局,笔者就为大家详细介绍完毕了,我们再次结合前边《4.1 32 位机器上进程虚拟内存空间分布》小节中介绍的进程虚拟内存空间和本小节介绍的内核虚拟内存空间来整体回顾下 32 位体系结构 Linux 的整个虚拟内存空间的布局:

7.2 64 位体系内核虚拟内存空间布局
内核虚拟内存空间在 32 位体系下只有 1G 大小,实在太小了,因此需要精细化的管理,于是按照功能分类划分除了很多内核虚拟内存区域,这样就显得非常复杂。
到了 64 位体系下,内核虚拟内存空间的布局和管理就变得容易多了,因为进程虚拟内存空间和内核虚拟内存空间各自占用 128T 的虚拟内存,实在是太大了,我们可以在这里边随意翱翔,随意挥霍。
因此在 64 位体系下的内核虚拟内存空间与物理内存的映射就变得非常简单,由于虚拟内存空间足够的大,即便是内核要访问全部的物理内存,直接映射就可以了,不在需要用到《7.1.2 ZONE_HIGHMEM 高端内存》小节中介绍的高端内存那种动态映射方式。
在前边《5.1 内核如何划分用户态和内核态虚拟内存空间》小节中我们提到,内核在 /arch/x86/include/asm/page_64_types.h 文件中通过 TASK_SIZE 将进程虚拟内存空间和内核虚拟内存空间分割开来。
#define TASK_SIZE (test_thread_flag(TIF_ADDR32) ? \IA32_PAGE_OFFSET : TASK_SIZE_MAX)#define TASK_SIZE_MAX task_size_max()#define task_size_max() ((_AC(1,UL) << __VIRTUAL_MASK_SHIFT) - PAGE_SIZE)#define __VIRTUAL_MASK_SHIFT 4764 位系统中的 TASK_SIZE 为 0x00007FFFFFFFF000

64位地址空间.png
在 64 位系统中,只使用了其中的低 48 位来表示虚拟内存地址。其中用户态虚拟内存空间为低 128 T,虚拟内存地址范围为:0x0000 0000 0000 0000 - 0x0000 7FFF FFFF F000 。
内核态虚拟内存空间为高 128 T,虚拟内存地址范围为:0xFFFF 8000 0000 0000 - 0xFFFF FFFF FFFF FFFF 。
本小节我们主要关注 0xFFFF 8000 0000 0000 - 0xFFFF FFFF FFFF FFFF 这段内核虚拟内存空间的布局情况。

64 位内核虚拟内存空间从 0xFFFF 8000 0000 0000 开始到 0xFFFF 8800 0000 0000 这段地址空间是一个 8T 大小的内存空洞区域。
紧着着 8T 大小的内存空洞下一个区域就是 64T 大小的直接映射区。这个区域中的虚拟内存地址减去 PAGE_OFFSET 就直接得到了物理内存地址。
PAGE_OFFSET 变量定义在 /arch/x86/include/asm/page_64_types.h 文件中:
#define __PAGE_OFFSET_BASE _AC(0xffff880000000000, UL)
#define __PAGE_OFFSET __PAGE_OFFSET_BASE从图中 VMALLOC_START 到 VMALLOC_END 的这段区域是 32T 大小的 vmalloc 映射区,这里类似用户空间中的堆,内核在这里使用 vmalloc 系统调用申请内存。
VMALLOC_START 和 VMALLOC_END 变量定义在 /arch/x86/include/asm/pgtable_64_types.h 文件中:
#define __VMALLOC_BASE_L4 0xffffc90000000000UL#define VMEMMAP_START __VMEMMAP_BASE_L4#define VMALLOC_END (VMALLOC_START + (VMALLOC_SIZE_TB << 40) - 1)从 VMEMMAP_START 开始是 1T 大小的虚拟内存映射区,用于存放物理页面的描述符 struct page 结构用来表示物理内存页。
VMEMMAP_START 变量定义在 /arch/x86/include/asm/pgtable_64_types.h 文件中:
#define __VMEMMAP_BASE_L4 0xffffea0000000000UL# define VMEMMAP_START __VMEMMAP_BASE_L4从 __START_KERNEL_map 开始是大小为 512M 的区域用于存放内核代码段、全局变量、BSS 等。这里对应到物理内存开始的位置,减去 __START_KERNEL_map 就能得到物理内存的地址。这里和直接映射区有点像,但是不矛盾,因为直接映射区之前有 8T 的空洞区域,早就过了内核代码在物理内存中加载的位置。
__START_KERNEL_map 变量定义在 /arch/x86/include/asm/page_64_types.h 文件中:
#define __START_KERNEL_map _AC(0xffffffff80000000, UL)7.2.1 64位体系结构下 Linux 虚拟内存空间整体布局
到现在为止,整个内核虚拟内存空间在 64 位体系下的布局笔者就为大家详细介绍完毕了,我们再次结合前边《4.2 64 位机器上进程虚拟内存空间分布》小节介绍的进程虚拟内存空间和本小节介绍的内核虚拟内存空间来整体回顾下 64 位体系结构 Linux 的整个虚拟内存空间的布局:

8. 到底什么是物理内存地址
聊完了虚拟内存,我们接着聊一下物理内存,我们平时所称的内存也叫随机访问存储器( random-access memory )也叫 RAM 。而 RAM 分为两类:
- 一类是静态 RAM( SRAM ),这类 SRAM 用于 CPU 高速缓存 L1Cache,L2Cache,L3Cache。其特点是访问速度快,访问速度为 1 - 30 个时钟周期,但是容量小,造价高。

CPU缓存结构.png
- 另一类则是动态 RAM ( DRAM ),这类 DRAM 用于我们常说的主存上,其特点的是访问速度慢(相对高速缓存),访问速度为 50 - 200 个时钟周期,但是容量大,造价便宜些(相对高速缓存)。
内存由一个一个的存储器模块(memory module)组成,它们插在主板的扩展槽上。常见的存储器模块通常以 64 位为单位( 8 个字节)传输数据到存储控制器上或者从存储控制器传出数据。

如图所示内存条上黑色的元器件就是存储器模块(memory module)。多个存储器模块连接到存储控制器上,就聚合成了主存。

内存结构.png
而 DRAM 芯片就包装在存储器模块中,每个存储器模块中包含 8 个 DRAM 芯片,依次编号为 0 - 7 。

存储器模块.png
而每一个 DRAM 芯片的存储结构是一个二维矩阵,二维矩阵中存储的元素我们称为超单元(supercell),每个 supercell 大小为一个字节(8 bit)。每个 supercell 都由一个坐标地址(i,j)。
i 表示二维矩阵中的行地址,在计算机中行地址称为 RAS (row access strobe,行访问选通脉冲)。 j 表示二维矩阵中的列地址,在计算机中列地址称为 CAS (column access strobe,列访问选通脉冲)。
下图中的 supercell 的 RAS = 2,CAS = 2。

DRAM结构.png
DRAM 芯片中的信息通过引脚流入流出 DRAM 芯片。每个引脚携带 1 bit的信号。
图中 DRAM 芯片包含了两个地址引脚( addr ),因为我们要通过 RAS,CAS 来定位要获取的 supercell 。还有 8 个数据引脚(data),因为 DRAM 芯片的 IO 单位为一个字节(8 bit),所以需要 8 个 data 引脚从 DRAM 芯片传入传出数据。
注意这里只是为了解释地址引脚和数据引脚的概念,实际硬件中的引脚数量是不一定的。
8.1 DRAM 芯片的访问
我们现在就以读取上图中坐标地址为(2,2)的 supercell 为例,来说明访问 DRAM 芯片的过程。

DRAM芯片访问.png
- 首先存储控制器将行地址 RAS = 2 通过地址引脚发送给 DRAM 芯片。
- DRAM 芯片根据 RAS = 2 将二维矩阵中的第二行的全部内容拷贝到内部行缓冲区中。
- 接下来存储控制器会通过地址引脚发送 CAS = 2 到 DRAM 芯片中。
- DRAM芯片从内部行缓冲区中根据 CAS = 2 拷贝出第二列的 supercell 并通过数据引脚发送给存储控制器。
DRAM 芯片的 IO 单位为一个 supercell ,也就是一个字节(8 bit)。
8.2 CPU 如何读写主存
前边我们介绍了内存的物理结构,以及如何访问内存中的 DRAM 芯片获取 supercell 中存储的数据(一个字节)。本小节我们来介绍下 CPU 是如何访问内存的:

CPU与内存之间的总线结构.png
CPU 与内存之间的数据交互是通过总线(bus)完成的,而数据在总线上的传送是通过一系列的步骤完成的,这些步骤称为总线事务(bus transaction)。
其中数据从内存传送到 CPU 称之为读事务(read transaction),数据从 CPU 传送到内存称之为写事务(write transaction)。
总线上传输的信号包括:地址信号,数据信号,控制信号。其中控制总线上传输的控制信号可以同步事务,并能够标识出当前正在被执行的事务信息:
- 当前这个事务是到内存的?还是到磁盘的?或者是到其他 IO 设备的?
- 这个事务是读还是写?
- 总线上传输的地址信号(物理内存地址),还是数据信号(数据)?。
这里大家需要注意总线上传输的地址均为物理内存地址 。比如:在 MESI 缓存一致性协议中当 CPU core0 修改字段 a 的值时,其他 CPU 核心会在总线上嗅探字段 a 的物理内存地址 ,如果嗅探到总线上出现字段 a 的物理内存地址 ,说明有人在修改字段 a,这样其他 CPU 核心就会失效字段 a 所在的 cache line 。
如上图所示,其中系统总线是连接 CPU 与 IO bridge 的,存储总线是来连接 IO bridge 和主存的。
IO bridge 负责将系统总线上的电子信号转换成存储总线上的电子信号。IO bridge 也会将系统总线和存储总线连接到IO总线(磁盘等IO设备)上。这里我们看到 IO bridge 其实起的作用就是转换不同总线上的电子信号。
8.3 CPU 从内存读取数据过程
假设 CPU 现在需要将物理内存地址为 A 的内容加载到寄存器中进行运算。
大家需要注意的是 CPU 只会访问虚拟内存,在操作总线之前,需要把虚拟内存地址转换为物理内存地址,总线上传输的都是物理内存地址,这里省略了虚拟内存地址到物理内存地址的转换过程,这部分内容笔者会在后续文章的相关章节详细为大家讲解,这里我们聚焦如果通过物理内存地址读取内存数据。

CPU读取内存.png
首先 CPU 芯片中的总线接口会在总线上发起读事务(read transaction)。 该读事务分为以下步骤进行:
- CPU 将物理内存地址 A 放到系统总线上。随后 IO bridge 将信号传递到存储总线上。
- 主存感受到存储总线上的地址信号并通过存储控制器将存储总线上的物理内存地址 A 读取出来。
- 存储控制器通过物理内存地址 A 定位到具体的存储器模块,从 DRAM 芯片中取出物理内存地址 A 对应的数据 X。
- 存储控制器将读取到的数据 X 放到存储总线上,随后 IO bridge 将存储总线上的数据信号转换为系统总线上的数据信号,然后继续沿着系统总线传递。
- CPU 芯片感受到系统总线上的数据信号,将数据从系统总线上读取出来并拷贝到寄存器中。
以上就是 CPU 读取内存数据到寄存器中的完整过程。
但是其中还涉及到一个重要的过程,这里我们还是需要摊开来介绍一下,那就是存储控制器如何通过物理内存地址 A 从主存中读取出对应的数据 X 的?
接下来我们结合前边介绍的内存结构以及从 DRAM 芯片读取数据的过程,来总体介绍下如何从主存中读取数据。
8.4 如何根据物理内存地址从主存中读取数据
前边介绍到,当主存中的存储控制器感受到了存储总线上的地址信号时,会将内存地址从存储总线上读取出来。
随后会通过内存地址定位到具体的存储器模块。还记得内存结构中的存储器模块吗 ?
内存结构.png
而每个存储器模块中包含了 8 个 DRAM 芯片,编号从 0 - 7 。
存储器模块.png
存储控制器会将物理内存地址 转换为 DRAM 芯片中 supercell 在二维矩阵中的坐标地址(RAS,CAS)。并将这个坐标地址发送给对应的存储器模块。随后存储器模块会将 RAS 和 CAS 广播到存储器模块中的所有 DRAM 芯片。依次通过 (RAS,CAS) 从 DRAM0 到 DRAM7 读取到相应的 supercell 。
DRAM芯片访问.png
我们知道一个 supercell 存储了一个字节( 8 bit ) 数据,这里我们从 DRAM0 到 DRAM7 依次读取到了 8 个 supercell 也就是 8 个字节,然后将这 8 个字节返回给存储控制器,由存储控制器将数据放到存储总线上。
CPU 总是以 word size 为单位从内存中读取数据,在 64 位处理器中的 word size 为 8 个字节。64 位的内存每次只能吞吐 8 个字节。
CPU 每次会向内存读写一个 cache line 大小的数据( 64 个字节),但是内存一次只能吞吐 8 个字节。
所以在物理内存地址对应的存储器模块中,DRAM0 芯片存储第一个低位字节( supercell ),DRAM1 芯片存储第二个字节,......依次类推 DRAM7 芯片存储最后一个高位字节。

读取存储器模块数据.png
由于存储器模块中这种由 8 个 DRAM 芯片组成的物理存储结构的限制,内存读取数据只能是按照物理内存地址,8 个字节 8 个字节地顺序读取数据。所以说内存一次读取和写入的单位是 8 个字节。

内存IO单位.png
而且在程序员眼里连续的物理内存地址实际上在物理上是不连续的。因为这连续的 8 个字节其实是存储于不同的 DRAM 芯片上的。每个 DRAM 芯片存储一个字节(supercell)
8.5 CPU 向内存写入数据过程
我们现在假设 CPU 要将寄存器中的数据 X 写到物理内存地址 A 中。同样的道理,CPU 芯片中的总线接口会向总线发起写事务(write transaction)。写事务步骤如下:
- CPU 将要写入的物理内存地址 A 放入系统总线上。
- 通过 IO bridge 的信号转换,将物理内存地址 A 传递到存储总线上。
- 存储控制器感受到存储总线上的地址信号,将物理内存地址 A 从存储总线上读取出来,并等待数据的到达。
- CPU 将寄存器中的数据拷贝到系统总线上,通过 IO bridge 的信号转换,将数据传递到存储总线上。
- 存储控制器感受到存储总线上的数据信号,将数据从存储总线上读取出来。
- 存储控制器通过内存地址 A 定位到具体的存储器模块,最后将数据写入存储器模块中的 8 个 DRAM 芯片中。
总结
本文我们从虚拟内存地址开始聊起,一直到物理内存地址结束,包含的信息量还是比较大的。首先笔者通过一个进程的运行实例为大家引出了内核引入虚拟内存空间的目的及其需要解决的问题。
在我们有了虚拟内存空间的概念之后,又近一步为大家介绍了内核如何划分用户态虚拟内存空间和内核态虚拟内存空间,并在次基础之上分别从 32 位体系结构和 64 位体系结构的角度详细阐述了 Linux 虚拟内存空间的整体布局分布。
- 我们可以通过 cat /proc/pid/maps 或者 pmap pid 命令来查看进程用户态虚拟内存空间的实际分布。
- 还可以通过 cat /proc/iomem 命令来查看进程内核态虚拟内存空间的的实际分布。
在我们清楚了 Linux 虚拟内存空间的整体布局分布之后,笔者又介绍了 Linux 内核如何对分布在虚拟内存空间中的各个虚拟内存区域进行管理,以及每个虚拟内存区域的作用。在这个过程中还介绍了相关的内核数据结构,近一步从内核源码实现角度加深大家对虚拟内存空间的理解。
最后介绍了物理内存的结构,以及 CPU 如何通过物理内存地址来读写内存中的数据。这里特地再次强调的是 CPU 只会访问虚拟内存地址,只不过在操作总线之前,通过一个地址转换硬件将虚拟内存地址转换为物理内存地址,然后将物理内存地址作为地址信号放在总线上传输,由于地址转换的内容和本文主旨无关,考虑到文章的篇幅以及复杂性,就没有过多的介绍。

相关文章:
万字带你深入理解 Linux 虚拟内存管理(下)
接上文:万字带你深入理解 Linux 虚拟内存管理(上) 6. 程序编译后的二进制文件如何映射到虚拟内存空间中 经过前边这么多小节的内容介绍,现在我们已经熟悉了进程虚拟内存空间的布局,以及内核如何管理这些虚拟内存区域&…...

【iOS】—— JSONModel源码学习
JSONModel 文章目录JSONModel关于JSONModel的用法initWithDictionary等方法load方法实现load方法调用时机init方法__setup__方法__inspectProperties:方法__doesDictionary方法__importDictionary方法关于JSONModel的用法 可以参考之前写的博客:【iOS】—— JSONMo…...

单片机怎么实现真正的多线程?
所谓多线程都是模拟的,本质都是单线程,因为cpu同一时刻只能执行一段代码。模拟的多线程就是任务之间快速切换,看起来像同时执行的样子。据说最近有多核的单片机,不过成本应该会高很多。对于模拟的多线程,我知道的有两种…...

【LeetCode】剑指 Offer(23)
目录 题目:剑指 Offer 46. 把数字翻译成字符串 - 力扣(Leetcode) 题目的接口: 解题思路: 代码: 过啦!!! 写在最后: 题目:剑指 Offer 46. 把…...

[免费专栏] 汽车威胁狩猎之不应该相信的几个威胁狩猎误区
也许每个人出生的时候都以为这世界都是为他一个人而存在的,当他发现自己错的时候,他便开始长大 少走了弯路,也就错过了风景,无论如何,感谢经历 汽车威胁狩猎专栏长期更新,本篇最新内容请前往: …...

LinuxFTP文件传输服务和DNS域名解析服务
♥️作者:小刘在C站 ♥️个人主页:小刘主页 ♥️每天分享云计算网络运维课堂笔记,努力不一定有收获,但一定会有收获加油!一起努力,共赴美好人生! ♥️夕阳下,是最美的绽放࿰…...

二叉搜索树原理及底层实现
二叉搜索树BST 概念 二叉搜索树又称二叉排序树,它可以是一棵空树,或者是具有以下性质的二叉树:若它的左子树不为空,则左子树上所有节点的值都小于根节点的值;若它的右子树不为空,则右子树上所有节点的值都…...
python自动化办公(一)
本文代码参考其他教程书籍实现。 文章目录文件读写open函数读取文本文件写入文本文件文件和目录操作使用os库使用shutil库文件读写 open函数 open函数有8个参数,常用前4个,除了file参数外,其他参数都有默认值。file指定了要打开的文件名称&a…...

LeetCode - 198 打家劫舍
目录 题目来源 题目描述 示例 提示 题目解析 算法源码 题目来源 198. 打家劫舍 - 力扣(LeetCode) 题目描述 你是一个专业的小偷,计划偷窃沿街的房屋。每间房内都藏有一定的现金,影响你偷窃的唯一制约因素就是相邻的房屋装…...
简单粗暴的分布式定时任务解决方案
分布式定时任务1.为什么需要定时任务?2.数据库实现分布式定时任务3.基于redis实现1.为什么需要定时任务? 因为有时候我们需要定时的执行一些操作,比如业务中产生的一些临时文件,临时文件不能立即删除,因为不清楚用户是…...

蓝桥杯第五天刷题
第一题:数的分解题目描述本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。把 2019 分解成 3 个各不相同的正整数之和,并且要求每个正整数都不包含数字 2和 4,一共有多少种不同的分解方法&…...
Java数组的定义和使用(万字详解)
目录 编辑 一. 数组的基本概念 1、什么是数组 2、数组的创建及初始化 1、数组的创建 2、数组的初始化 3、数组的使用 (1)数组中元素访问 (3)遍历数组 二、数组是引用类型 1、初始JVM的内存分布 2、基本类型变量与引用类…...
【SpringBoot】自定义Starter
🚩本文已收录至专栏:Spring家族学习之旅 👍希望您能有所收获 一.概述 在使用SpringBoot进行开发的时候,我们发现使用很多技术都是直接导入对应的starter,然后就实现了springboot整合对应技术,再加上一些简…...
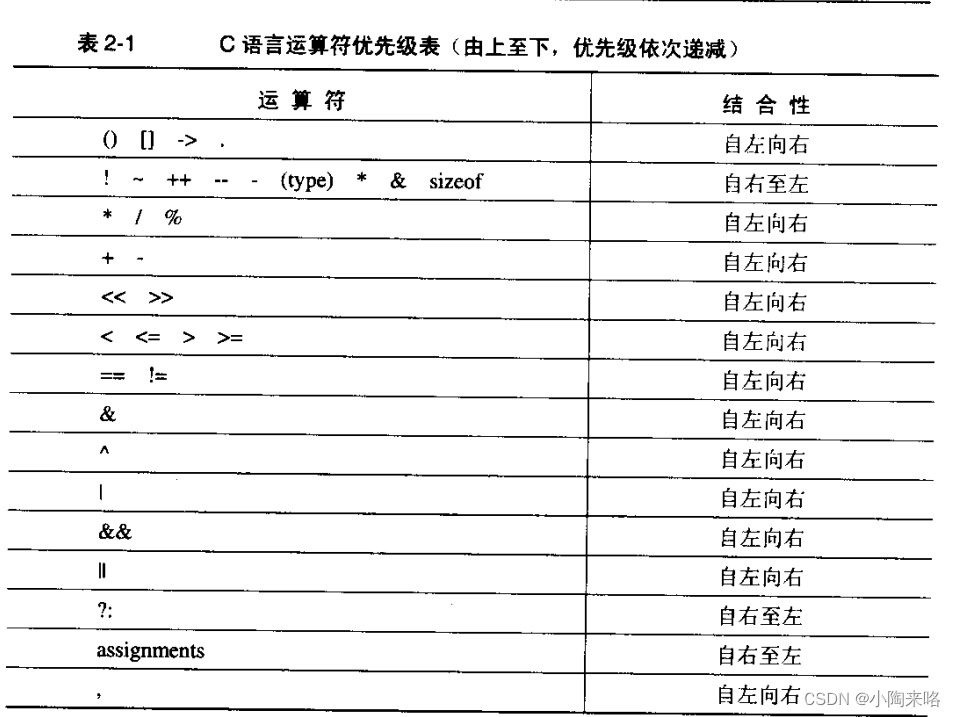
【C陷阱与缺陷】----语法陷阱
💯💯💯 要理解一个C程序,必须理解这些程序是如何组成声明,表达式,语句的。虽然现在对C的语法定义很完善,几乎无懈可击,大门有时这些定义与人们的直觉相悖,或容易引起混淆…...

虹科分享| 关于TrueNAS十问十答
上一篇文章我们向您介绍了虹科新品HK-TrueNAS企业存储,很多小伙伴会疑问到底什么是NAS存储,之前常用的磁盘、磁带属于什么存储架构,NAS存储好在哪里,什么时候使用NAS?今天我们整理了关于TrueNAS的十问十答,…...
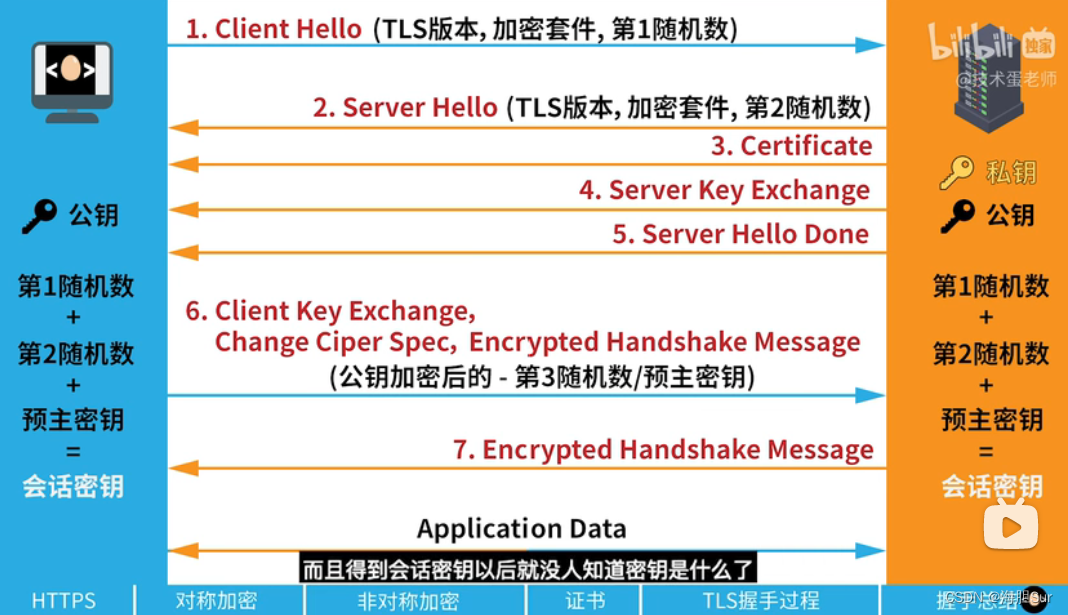
Https 笔记
HTTP TLS TLS 的前身是 SSL 非对称加密的核心: 两个密钥(公私) https 需要第三方CA(证书授权中心)申请SSL证书以确定其真实性 证书种包含了特定的公钥和私钥 密钥交换 自己将私钥上锁后发给对方对方也上锁 在还回来…...

【Python+requests+unittest+excel】实现接口自动化测试框架
一、框架结构: 工程目录 二、Case文件设计 三、基础包 base 3.1 封装get/post请求(runmethon.py) 1 import requests2 import json3 class RunMethod:4 def post_main(self,url,data,headerNone):5 res None6 if heade…...
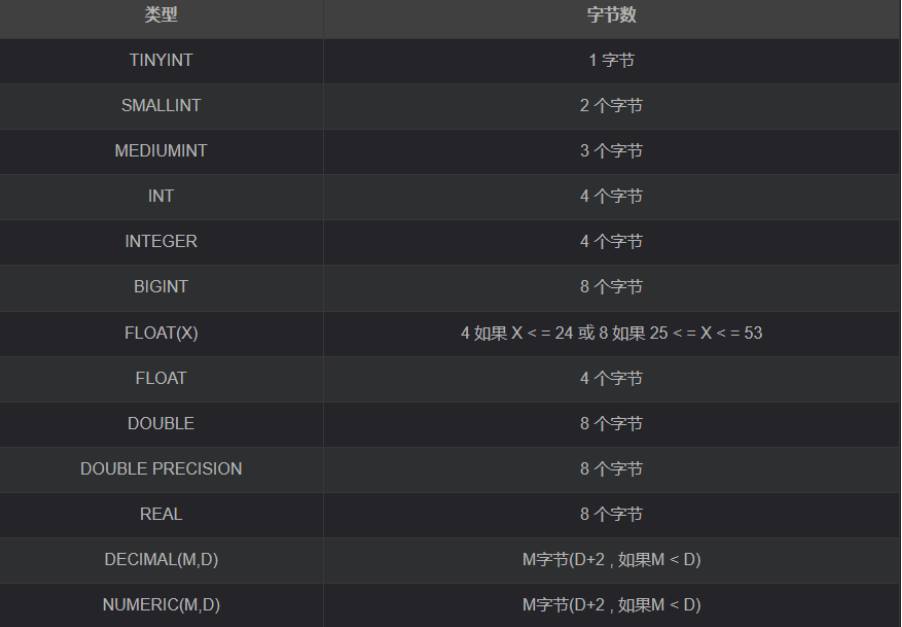
MySQL终端的使用及其数据类型的使用
什么是数据库?数据库(Database)是按照数据结构来组织、存储和管理数据的仓库。每个数据库都有一个或多个不同的 API 用于创建,访问,管理,搜索和复制所保存的数据。我们也可以将数据存储在文件中,…...
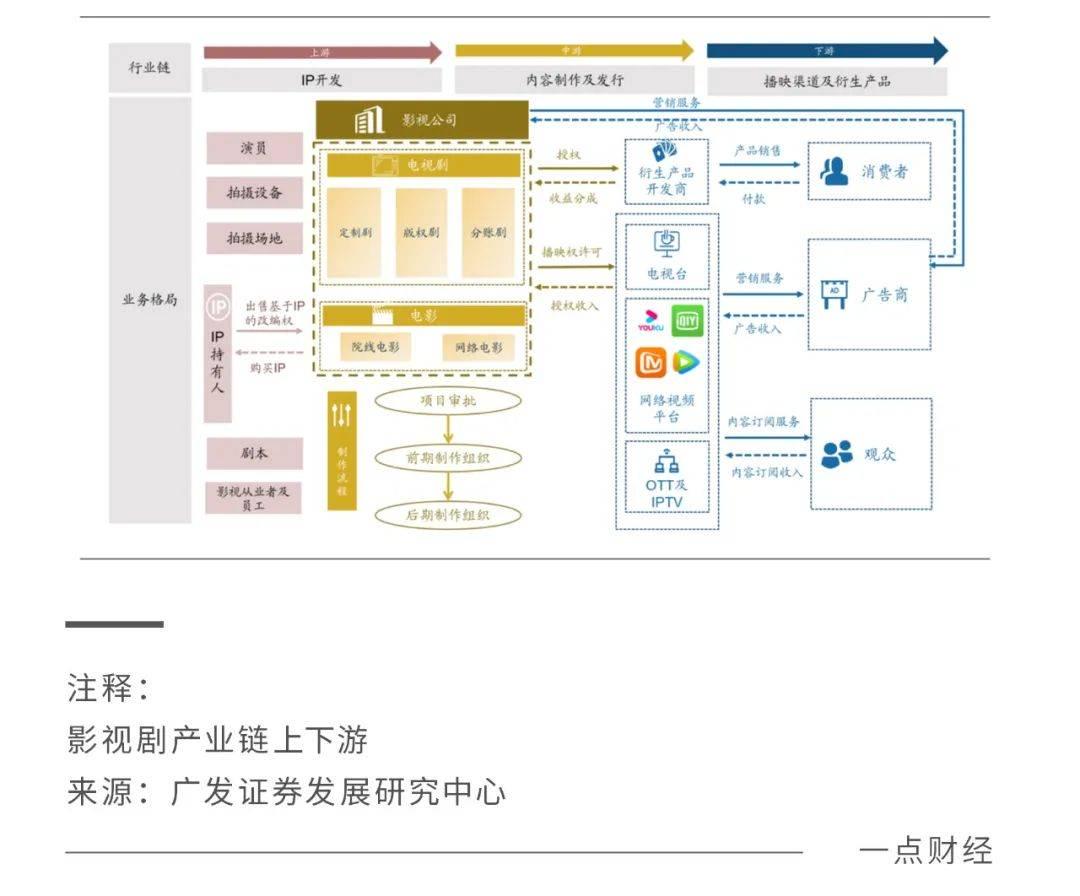
长视频终局:一场考验资金储备的消耗战
赢者通吃,似乎已成为各行各业的常识,但事实真的是这样吗?20世纪70年代,石油价格高涨,在墨西哥湾油田拍卖中高价拍得油田的企业,要么亏损,要么收入低于预期,但仍然有无数企业在高价竞…...

javaEE初阶 — CSS 常用的属性
文章目录CSS 常用的属性1 字体属性1.1 设置字体家族 font-family1.2 设置字体大小 font-size1.3 设置字体粗细 font-weight1.4 文字倾斜 font-style2 文本属性2.1 文本颜色2.2 文本对齐2.3 文本装饰2.4 文本缩进2.5 行高3 背景属性3.1 背景颜色3.2 背景图片3.3 背景位置3.4 背景…...

何为可编程控制器?可编程控制器4大内容介绍
可编程控制器在控制中常为使用,因此本文将从4大方面对可编程控制器予以介绍,以增进大家对可编程控制器的了解。这4大方面包括:1.何为可编程控制器?2. 可编程控制器的基本组成,3. 可编程控制器发展史,以及4. 可编程控制…...

从MATLAB验证到RTL实现:一个完整华莱士树乘法器的设计、仿真与调试实战
从MATLAB验证到RTL实现:一个完整华莱士树乘法器的设计、仿真与调试实战 在数字信号处理、图形渲染和密码学等高性能计算领域,乘法器的效率往往成为系统瓶颈。传统阵列乘法器虽然结构规整,但随着位宽增加,其线性增长的延迟特性难以…...

如何快速掌控Windows浏览器自由:3步掌握EdgeRemover终极系统优化工具
如何快速掌控Windows浏览器自由:3步掌握EdgeRemover终极系统优化工具 【免费下载链接】EdgeRemover A PowerShell script that correctly uninstalls or reinstalls Microsoft Edge on Windows 10 & 11. 项目地址: https://gitcode.com/gh_mirrors/ed/EdgeRem…...
)
Cadence AMS Designer 保姆级教程:手把手教你搞定数模混合仿真(含Verilog模块导入避坑指南)
Cadence AMS Designer 保姆级教程:手把手教你搞定数模混合仿真(含Verilog模块导入避坑指南) 数模混合仿真一直是芯片设计中的关键环节,尤其对于刚接触Cadence环境的新手工程师或在校学生来说,从零开始搭建混合仿真环境…...
)
保姆级教程:用Winbox给ROS配置一线多拨,实测200M宽带叠加效果(附避坑指南)
家庭网络优化实战:Winbox配置多拨提升宽带利用率 家里装了200M宽带,但下载大文件时总觉得速度没跑满?多人同时在线看4K视频就开始卡顿?其实通过简单的路由器配置,你完全有可能突破运营商单线限制,让宽带利用…...

CANN/asc-devkit SPM缓冲区写入API
WriteSpmBuffer 【免费下载链接】asc-devkit 本项目是CANN 推出的昇腾AI处理器专用的算子程序开发语言,原生支持C和C标准规范,主要由类库和语言扩展层构成,提供多层级API,满足多维场景算子开发诉求。 项目地址: https://gitcode…...

XUnity.AutoTranslator:5步实现Unity游戏实时翻译的完整解决方案
XUnity.AutoTranslator:5步实现Unity游戏实时翻译的完整解决方案 【免费下载链接】XUnity.AutoTranslator 项目地址: https://gitcode.com/gh_mirrors/xu/XUnity.AutoTranslator 你是否曾经因为语言障碍而错过心仪的外语游戏?XUnity.AutoTransla…...

Ajax技术和Axois工具库
前端如何才能动态展示数据?如何动态获取后端的数据呢? 目录 文章目录 一、什么是Ajax? 二、什么是Axios? 核心用途 三、如何在Vue项目中使用Axios? 1、安装Axios 2、引入Axios 3、基础使用 4、拦截器 5、async/await是什么? 总…...

从NIST到Interatomic Repository:金属体系L-J势参数高效检索与验证指南
1. 金属模拟中的L-J势参数为何如此重要 我第一次用LAMMPS模拟镁合金拉伸过程时,发现结果和实验数据差了十万八千里。折腾了两周才发现问题出在Lennard-Jones势参数上——当时随便找了个文献值就用,结果模拟出的晶格常数比实际小了15%。这个教训让我明白…...

终极指南:5分钟快速解密网易云音乐NCM文件,实现音乐自由
终极指南:5分钟快速解密网易云音乐NCM文件,实现音乐自由 【免费下载链接】ncmdump ncmdump - 网易云音乐NCM转换 项目地址: https://gitcode.com/gh_mirrors/ncmdu/ncmdump 还在为网易云音乐下载的NCM格式文件无法在其他播放器播放而烦恼吗&#…...