复现YOLO_ORB_SLAM3_with_pointcloud_map项目记录
文章目录
- 1.环境问题
- 2.遇到的问题
- 2.1编译问题1 monotonic_clock
- 2.2 associate.py
- 2.3 associate.py问题
- 3.运行问题
1.环境问题
首先环境大家就按照github上的指定环境安装即可

环境怎么安装网上大把的资源,自己去找。
2.遇到的问题
2.1编译问题1 monotonic_clock

这是因为C++版本不同导致的系统计时函数编译报错
解决方案是 搜索COMPILEDWITHC11
然后把monotonic_clock 换成 steady_clock
例如:
/*
#ifdef COMPILEDWITHC11std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
#elsestd::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
#endif
*/
// 替换成下面的:std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();//修改替换的代码部分
这个问题会报很多次,至少十几次吧,因为很多文件都有这个东西,他报错了我们根据报错位置去改就可以了,就是比较麻烦。
当然我看到有人说只需要把COMPILEDWITHC11改为COMPILEDWITHC14就可以了,这个我没有尝试,我只用了上面的方法,大家可以自己尝试。
2.2 associate.py
数据集的下载地址:https://cvg.cit.tum.de/data/datasets/rgbd-dataset/download

associate.py是个啥,这个东西怎么用
这个就是把数据集转化成一个文件的东西
链接: 怎么用看这个
1.按照要求下载数据集,我下载的是rgbd_dataset_freiburg3_walking_xyz,将其解压到你喜欢的目录.我个人放在了evalution下
2.下载 associate.py.放在evalution目录下面.

3.打开终端,进入到associate.py所在目录

python associate.py rgb.txt depth.txt > associations.txt
4.命令解说
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUMX.yaml PATH_TO_SEQUENCE_FOLDER ASSOCIATIONS_FILE
PATH_TO_SEQUENCE_FOLDER文件夹即为数据库所在文件夹,我的是在orbslam2工程下面,
ASSOCIATIONS_FILE即为第3步中生成的associations.txt,给出他的制定目录位置
例子:大家可以参考我的目录自行更改!
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUMX.yaml /home/lvslam/YOLO_ORB_SLAM3_with_pointcloud_map/evaluation/rgbd_dataset_freiburg3_walking_xyz /home/lvslam/YOLO_ORB_SLAM3_with_pointcloud_map/evaluation/rgbd_dataset_freiburg3_walking_xyz/associations.txt 2.3 associate.py问题
问题1:报错AttributeError: ‘dict_keys’ object has no attribute ‘remove’
由于Python2和python3语法的差别,需要将associate.py中第86行87行的
first_keys = first_list.keys()second_keys = second_list.keys()
改为
first_keys = list(first_list.keys())second_keys = list(second_list.keys())
问题2:TypeError: read_file_list() takes exactly 2 arguments (1 given)
所遇到的问题是因为read_file_list()函数需要两个参数,而你在调用时只传递了一个参数。我们需要向read_file_list()传递两个参数,即args.first_file和remove_bounds。从代码来看,remove_bounds应该是一个布尔值,具体是True还是False,可以根据需求来设定。
我们需要修改associate.py
改为:
import argparse
import sys
import os
import numpydef read_file_list(filename, remove_bounds):"""Reads a trajectory from a text file. File format:The file format is "stamp d1 d2 d3 ...", where stamp denotes the time stamp (to be matched)and "d1 d2 d3.." is arbitary data (e.g., a 3D position and 3D orientation) associated to this timestamp. Input:filename -- File nameOutput:dict -- dictionary of (stamp,data) tuples"""file = open(filename)data = file.read()lines = data.replace(",", " ").replace("\t", " ").split("\n")if remove_bounds:lines = lines[100:-100]list = [[v.strip() for v in line.split(" ") if v.strip() != ""] for line in lines if len(line) > 0 and line[0] != "#"]list = [(float(l[0]), l[1:]) for l in list if len(l) > 1]return dict(list)def associate(first_list, second_list, offset, max_difference):"""Associate two dictionaries of (stamp,data). As the time stamps never match exactly, we aim to find the closest match for every input tuple.Input:first_list -- first dictionary of (stamp,data) tuplessecond_list -- second dictionary of (stamp,data) tuplesoffset -- time offset between both dictionaries (e.g., to model the delay between the sensors)max_difference -- search radius for candidate generationOutput:matches -- list of matched tuples ((stamp1,data1),(stamp2,data2))"""first_keys = list(first_list.keys())second_keys = list(second_list.keys())potential_matches = [(abs(a - (b + offset)), a, b)for a in first_keysfor b in second_keysif abs(a - (b + offset)) < max_difference]potential_matches.sort()matches = []for diff, a, b in potential_matches:if a in first_keys and b in second_keys:first_keys.remove(a)second_keys.remove(b)matches.append((a, b))matches.sort()return matchesif __name__ == '__main__':# parse command lineparser = argparse.ArgumentParser(description='''This script takes two data files with timestamps and associates them ''')parser.add_argument('first_file', help='first text file (format: timestamp data)')parser.add_argument('second_file', help='second text file (format: timestamp data)')parser.add_argument('--first_only', help='only output associated lines from first file', action='store_true')parser.add_argument('--offset', help='time offset added to the timestamps of the second file (default: 0.0)', default=0.0)parser.add_argument('--max_difference', help='maximally allowed time difference for matching entries (default: 0.02)', default=0.02)parser.add_argument('--remove_bounds', help='remove first and last 100 entries', action='store_true')args = parser.parse_args()first_list = read_file_list(args.first_file, args.remove_bounds)second_list = read_file_list(args.second_file, args.remove_bounds)matches = associate(first_list, second_list, float(args.offset), float(args.max_difference))if args.first_only:for a, b in matches:print("%f %s" % (a, " ".join(first_list[a])))else:for a, b in matches:print("%f %s %f %s" % (a, " ".join(first_list[a]), b - float(args.offset), " ".join(second_list[b])))
3.运行问题
rgbd_tum: /tmp/llvm/lib/Support/BranchProbability.cpp:41:llvm::BranchProbability::BranchProbability(uint32_t, uint32_t): 假设 ‘Numerator <= Denominator && “Probability cannot be bigger than 1!”’ 失败。
已放弃 (核心已转储)


运行出来两秒就闪退的问题!
切换刚开始的libtorch版本
https://download.pytorch.org/libtorch/cpu/libtorch-cxx11-abi-shared-with-deps-2.3.1%2Bcpu.zip
这个时2.3.1版本的,我们只需要将上面的数字换掉,然后直接浏览器粘贴就可以下对对应的版本!!
经过测试使用1.7.1版本的libtorch可以解决这个问题
也就是
https://download.pytorch.org/libtorch/cpu/libtorch-cxx11-abi-shared-with-deps-1.7.1%2Bcpu.zip
重新安装号新的1.7.1版本的libtorch后重新编译,./build.sh
又会遇到下面的问题:
version `GOMP_4.5’ not found (required by /lib/x86_64-linux-gnu/libpcl_common.so.1.10)

我们需要链接动态库解决这个问题:
ln -sf /usr/lib/x86_64-linux-gnu/libgomp.so.1 /YOLO_ORB_SLAM3_with_pointcloud_map/Thirdparty/libtorch/lib/libgomp-75eea7e8.so.1
之后应该就是可以运行了,不过有可能有人会碰到别的问题
之后如果报错:libORB_SLAM3.so: undefined symbol: _ZN5DBoW24FORB1LE,查看下面的博客就可以
https://blog.csdn.net/qq_41035283/article/details/128301376
然后我们就成功复现这个项目了!!!!

相关文章:
复现YOLO_ORB_SLAM3_with_pointcloud_map项目记录
文章目录 1.环境问题2.遇到的问题2.1编译问题1 monotonic_clock2.2 associate.py2.3 associate.py问题 3.运行问题 1.环境问题 首先环境大家就按照github上的指定环境安装即可 环境怎么安装网上大把的资源,自己去找。 2.遇到的问题 2.1编译问题1 monotonic_cloc…...

Docker:Docker网络
Docker Network 是 Docker 平台中的一项功能,允许容器相互通信以及与外界通信。它提供了一种在 Docker 环境中创建和管理虚拟网络的方法。Docker 网络使容器能够连接到一个或多个网络,从而使它们能够安全地共享信息和资源。 预备知识 推荐先看视频先有…...
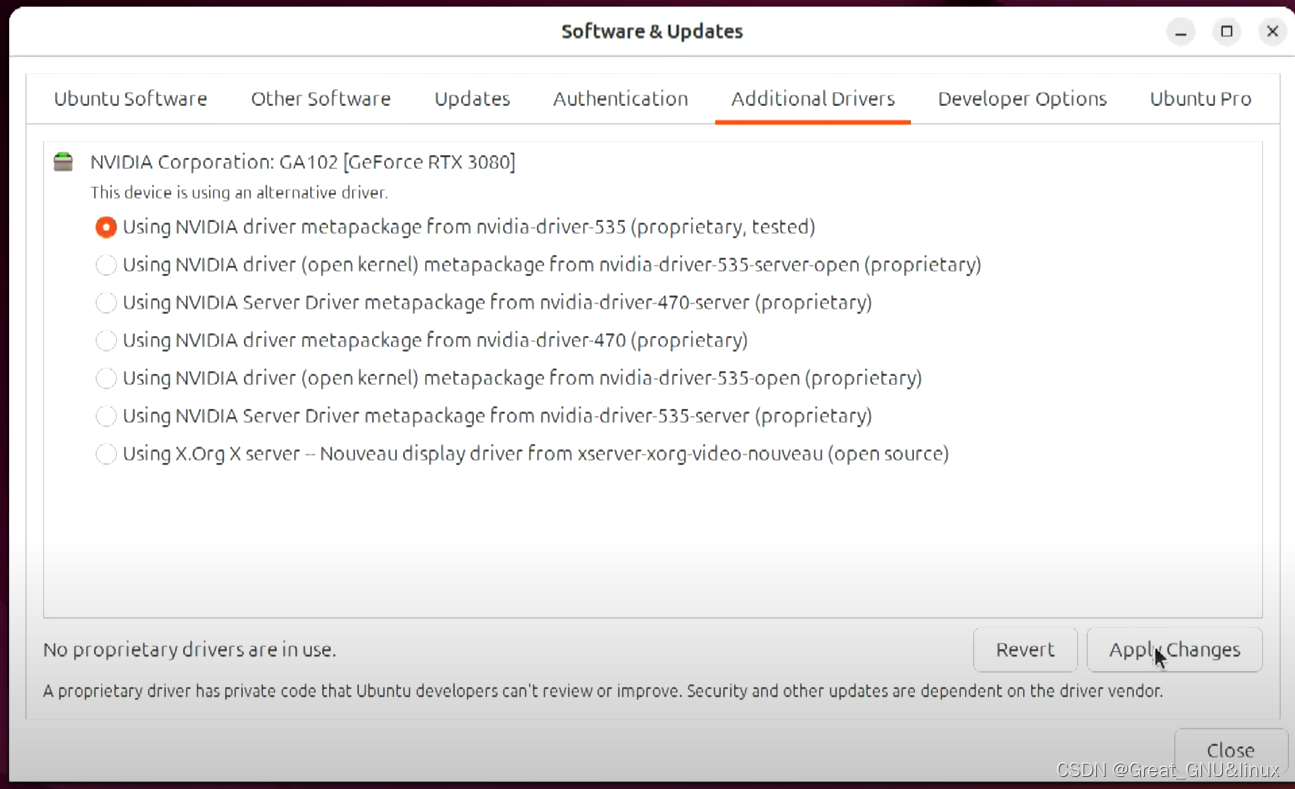
Ubuntu 24.04-自动安装-Nvidia驱动
教程 但在安全启动模式下可能会报错。 先在Nvidia官网找到GPU对应的驱动版, 1. 在软件与更新中选择合适的驱动 2. ubuntu自动安装驱动 sudo ubuntu-drivers autoinstall显示驱动 ubuntu-drivers devices3. 安装你想要的驱动 sudo apt install nvidia-driver-ve…...

【CSAPP】-attacklab实验
目录 实验目的与要求 实验原理与内容 实验设备与软件环境 实验过程与结果(可贴图) 实验总结 实验目的与要求 1. 强化机器级表示、汇编语言、调试器和逆向工程等方面基础知识,并结合栈帧工作原理实现简单的栈溢出攻击,掌握其基…...

docker部署onlyoffice,开启JWT权限校验Token
原来的部署方式 之前的方式是禁用了JWT: docker run -itd -p 8080:80 --name docserver --network host -e JWT_ENABLEDfalse --restartalways onlyoffice/documentserver:8 新的部署方式 参考文档:https://helpcenter.onlyoffice.com/installation/…...

Hive排序字段解析
Hive排序字段解析 在Hive中,CLUSTER BY、DISTRIBUTE BY、SORT BY和ORDER BY是用于数据分发和排序的关键子句,它们各自有不同的用途和性能特点。让我们逐一解析这些子句: 1. DISTRIBUTE BY 用途: 主要用于控制如何将数据分发到Reducer。它可…...

3101.力扣每日一题7/6 Java(接近100%解法)
博客主页:音符犹如代码系列专栏:算法练习关注博主,后期持续更新系列文章如果有错误感谢请大家批评指出,及时修改感谢大家点赞👍收藏⭐评论✍ 目录 思路 解题方法 时间复杂度 空间复杂度 Code 思路 主要是基于对…...

virtualbox窗口和win10窗口的切换
1、问题: 从windows切换到虚拟机可以用快捷键 ALTTAB,但是从虚拟机到windows使用 ALTTAB 无法成功切换 2、解决方法: 按下图操作 按上面步骤设置之后,每次要从虚拟机窗口切换到windows窗口 只需要先按 CtrlAlt 跳出虚拟机窗口&…...

卫星轨道平面简单认识
目录 一、轨道平面 1.1 轨道根数 1.2 应用考虑 二、分类 2.1 根据运行高度 2.2 根据运行轨迹偏心率 2.3 根据倾角大小 三、卫星星座中的轨道平面 四、设计轨道平面的考虑因素 一、轨道平面 1.1 轨道根数 轨道平面是定义卫星或其他天体绕行另一天体运动的平面。这个平…...

IP-Guard定制函数配置说明
设置客户端配置屏蔽: 关键字:disfunc_austascrtrd 内容:1 策略效果:屏幕整个屏幕监控模块。会导致屏幕历史查询这个功能也不能使用。 security_proxy1 安全代理参数 safe_enforce_authproc进程 强制软件上 安全代理网关…...

C++常用类
C常用类 1. std::string类2. std::vector 类2.1 特性2.2 用法 1. std::string类 std::string 是 C 标准库中的一个类,用于处理字符串。它提供了许多方法来创建、操作和管理字符串,如连接、查找、比较、替换和分割等操作。std::string 类定义在 头文件中…...
)
React Hooks --- 分享自己开发中常用的自定义的Hooks (1)
为什么要使用自定义 Hooks 自定义 Hooks 是 React 中一种复用逻辑的机制,通过它们可以抽离组件中的逻辑,使代码更加简洁、易读、易维护。它们可以在多个组件中复用相同的逻辑,减少重复代码。 1、useThrottle 代码 import React,{ useRef,…...
uniapp H5页面设置跨域请求
记录一下本地服务在uniapp H5页面访问请求报跨域的错误 这是我在本地起的服务端口号为8088 ip大家可打开cmd 输入ipconfig 查看 第一种方法 在源码视图中配置 "devServer": {"https": false, // 是否启用 https 协议,默认false"port&q…...
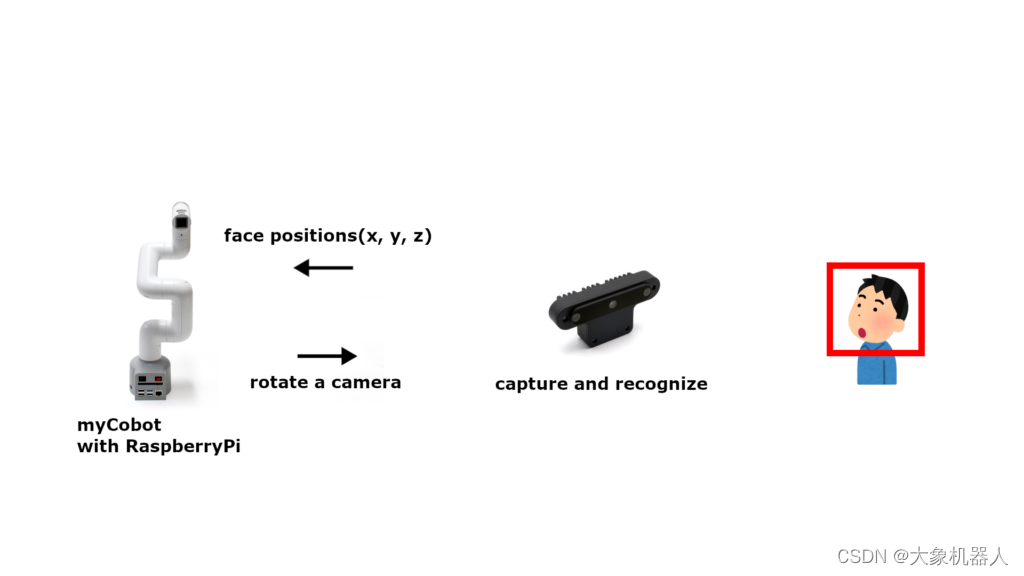
使用myCobot280和OAK-D OpenCV DepthAI摄像头制作一个实时脸部跟踪的手机支架!
引言 由于YouTube和Netflix的出现,我们开始躺着看手机。然而,长时间用手拿着手机会让人感到疲劳。这次我们制作了一个可以在你眼前保持适当距离并调整位置的自动移动手机支架,让你无需用手拿着手机。请务必试试! 准备工作 这次我们…...
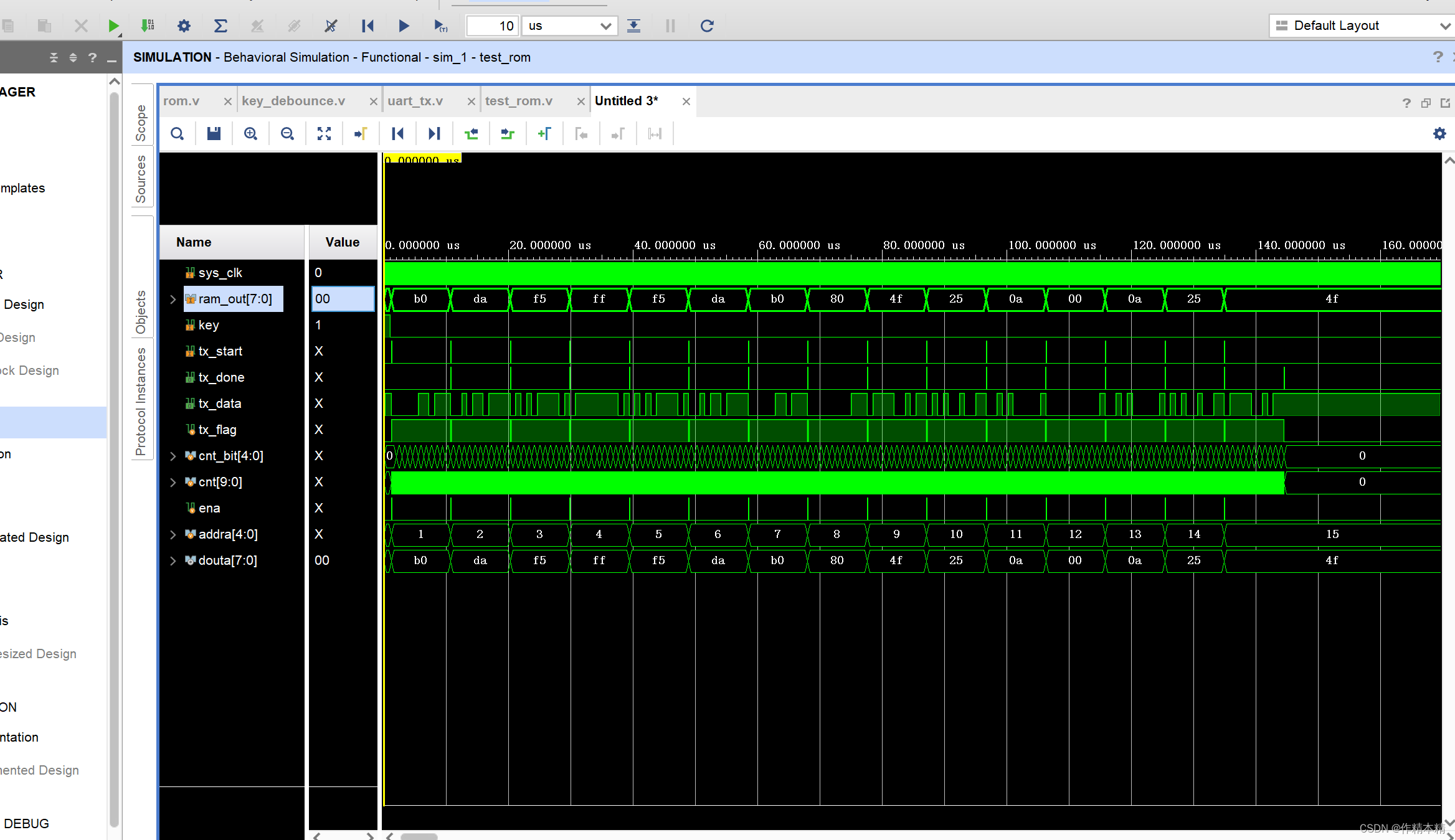
Xilinx FPGA:vivado关于单端ROM的一个只读小实验
一、实验要求 将生成好的voe文件里的数据使用rom读取出来,采用串口工具发送给电脑(当按键来临时)。 二、程序设计 按键消抖模块: timescale 1ns / 1ps module key_debounce(input sys_clk ,input rst_n…...

集成学习(一)Bagging
前边学习了:十大集成学习模型(简单版)-CSDN博客 Bagging又称为“装袋法”,它是所有集成学习方法当中最为著名、最为简单、也最为有效的操作之一。 在Bagging集成当中,我们并行建立多个弱评估器(通常是决策…...

Docker 中查看及修改 Redis 容器密码的实用指南
在使用 Docker 部署 Redis 容器时,有时我们需要查看或修改 Redis 的密码。本文将详细介绍如何在 Docker 中查看和修改 Redis 容器的密码,帮助你更好地管理和维护你的 Redis 实例。 一、查看 Redis 容器密码 通常在启动 Redis 容器时,我们会…...

CH09_JS的循环控制语句
第9章:Javascript循环控制语句 本章目标 掌握break关键字的使用掌握continue关键字的使用 课程回顾 for循环的特点和语法while循环的特点和语法do-while循环的特点和语法三个循环的区别 讲解内容 1. break关键字 为什么要使用break关键字 生活中,描…...

Python实现Mybatis Plus
Python实现Mybatis Plus from flask import g from sqlalchemy import asc, descclass QueryWrapperBuilder:conditions {}order_by_info {}def __new__(cls, *args, **kwargs):obj super(QueryWrapperBuilder, cls).__new__(cls)return objdef __init__(self, obj):self.o…...
卷积神经网络和Vision Transformer的对比之归纳偏置
卷积神经网络(CNN)和视觉变换器(Vision Transformer,ViT)是两种常用于图像处理的深度学习模型。它们各有优缺点,其中一个重要的区别在于它们对图像数据的“归纳偏置”(inductive bias࿰…...

AI智能体到底强在哪?为什么大家开始从“养龙虾”转向“养马”
那么AI智能体的核心能力是什么? 1、理解需求 它能分析你的真实意图,而不是只看表面的文字,比如让它整理这个月的消费情况,它明白之后,会读取账单,做分类统计,生成总结,最后输出图表。…...

ARMv8 HFGITR_EL2寄存器解析与虚拟化指令陷阱控制
1. AArch64 HFGITR_EL2寄存器架构解析HFGITR_EL2(Hypervisor Fine-Grained Instruction Trap Register)是ARMv8架构中专门用于指令级陷阱控制的系统寄存器,属于虚拟化扩展的重要组成部分。这个64位寄存器通过位映射机制实现对特定AArch64指令…...

华硕笔记本终极性能控制指南:用G-Helper完全替代Armoury Crate
华硕笔记本终极性能控制指南:用G-Helper完全替代Armoury Crate 【免费下载链接】g-helper Lightweight Armoury Crate alternative for Asus laptops with nearly the same functionality. Works with ROG Zephyrus, Flow, TUF, Strix, Scar, ProArt, Vivobook, Zen…...

终极免费方案:WandEnhancer完整解锁WeMod Pro功能快速指南
终极免费方案:WandEnhancer完整解锁WeMod Pro功能快速指南 【免费下载链接】Wand-Enhancer Advanced UX and interoperability extension for Wand (WeMod) app 项目地址: https://gitcode.com/gh_mirrors/we/Wand-Enhancer 你是否渴望享受WeMod Pro会员的所…...

2026年LLM推理加速全景:量化、投机解码与KV Cache工程实战
大语言模型推理速度慢、成本高,是阻碍AI大规模落地的核心障碍之一。一个7B参数的模型,在标准配置下每秒只能生成约30个token,对于需要实时响应的应用来说几乎无法接受。但2026年,一系列推理加速技术的成熟,让这一局面发…...

AI圈内火热的Agent、MCP、Skill、CLI是啥?用装修房子讲透,看完秒懂
本文用装修房子的比喻,详细解释了AI领域的四个核心概念:Agent如同会自主规划任务的私人助理;MCP是AI与外部工具数据的统一接口,类似USB-C;Skill是指导AI按标准操作执行的手册;CLI则是不依赖图形界面的命令行…...

TVA注意力层INT8量化配置技巧
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

如何在3分钟内为任何活动搭建专业级滚动抽奖系统?Magpie-LuckyDraw全平台开源方案深度解析
如何在3分钟内为任何活动搭建专业级滚动抽奖系统?Magpie-LuckyDraw全平台开源方案深度解析 【免费下载链接】Magpie-LuckyDraw 🏅A fancy lucky-draw tool supporting multiple platforms💻(Mac/Linux/Windows/Web/Docker) 项目地址: https…...

我们公司全员把 Cursor 换成了自研的 全开源AtomCode
【引子】这是一篇实录——一位 CTO 用 28 天,用 Claude GLM 双模型调度,造出了一个让全公司放弃 Cursor 的工具。然后我意识到我们正在经历的事情,比"换工具"大得多。【读者承诺】接下来 15 分钟,你会拿到三件东西:一个真实案例(28 天 1,146 commits 是怎么做出来的…...

网飞成立 AI 动画工作室,开启流媒体“原生 AI 制片时代”,中外布局逻辑有何不同?
1. Netflix“偷跑”在影视巨头关于 AIGC 的军备竞赛中,Netflix 再次加速。据外媒 TheVerge 报道,网飞于今年 3 月成立了名为 "INKubator" 的工作室,这是全球流媒体巨头中首个以生成式人工智能为核心的动画制作部门。此动作引发全球…...