注意力机制 attention Transformer 笔记
动手学深度学习
这里写自定义目录标题
- 注意力
- 加性注意力
- 缩放点积注意力
- 多头注意力
- 自注意力
- Transformer
注意力

注意力汇聚的输出为值的加权和
查询的长度为q,键的长度为k,值的长度为v。
q ∈ 1 × q , k ∈ 1 × k , v ∈ R 1 × v {\bf{q}} \in {^{1 \times q}},{{\bf{k}}} \in {^{1 \times k}},{{\bf{v}}} \in {\mathbb{R}^{1 \times v}} q∈1×q,k∈1×k,v∈R1×v
n个查询和m个键-值对
Q ∈ n × q , K ∈ m × k , V ∈ R m × v {\bf{Q}} \in {^{n \times q}},{\bf{K}} \in {^{m \times k}},{\bf{V}} \in {\mathbb{R}^{m \times v}} Q∈n×q,K∈m×k,V∈Rm×v
a ( Q , K ) ∈ R n × m {\bf{a}}\left( {{\bf{Q}},{\bf{K}}} \right) \in {\mathbb{R}^{n \times m}} a(Q,K)∈Rn×m是注意力评分函数
α ( Q , K ) = s o f t m a x ( a ( Q , K ) ) = exp ( a ( Q , K ) ) ∑ j = 1 m exp ( a ( Q , K ) ) ∈ R n × m {\boldsymbol{\alpha}} \left( {{\bf{Q}},{\bf{K}}} \right) = {\rm{softmax}}\left( {{\bf{a}}\left( {{\bf{Q}},{\bf{K}}} \right)} \right) = \frac{{\exp \left( {{\bf{a}}\left( {{\bf{Q}},{\bf{K}}} \right)} \right)}}{{\sum\limits_{j = 1}^m {\exp \left( {{\bf{a}}\left( {{\bf{Q}},{\bf{K}}} \right)} \right)} }} \in {\mathbb{R}^{n \times m}} α(Q,K)=softmax(a(Q,K))=j=1∑mexp(a(Q,K))exp(a(Q,K))∈Rn×m是注意力权重
f ( Q , K , V ) = α ( Q , K ) ⊤ V ∈ R n × v f({\bf{Q}},{\bf{K}},{\bf{V}}) = {\boldsymbol{\alpha}} {\left( {{\bf{Q}},{\bf{K}}} \right)^ \top }{\bf{V}} \in {\mathbb{R}^{n \times v}} f(Q,K,V)=α(Q,K)⊤V∈Rn×v是注意力汇聚函数
加性注意力
q ∈ R 1 × q , k ∈ R 1 × k {\bf{q}} \in {\mathbb {R}^{1 \times q}},{\bf{k}} \in {\mathbb {R}^{1 \times k}} q∈R1×q,k∈R1×k
W q ∈ R h × q , W k ∈ R h × k , w v ∈ R h × 1 {{\bf{W}}_q} \in {{\mathbb R}^{h \times q}},{{\bf{W}}_k} \in {{\mathbb R}^{h \times k}},{{\bf{w}}_v} \in {{\mathbb R}^{h \times 1}} Wq∈Rh×q,Wk∈Rh×k,wv∈Rh×1
a ( q , k ) = w v ⊤ t a n h ( W q q ⊤ + W k k ⊤ ) ∈ R a({\bf{q}},{\bf{k}}) = {\bf{w}}_v^ \top {\rm{tanh}}({{\bf{W}}_q}{{\bf{q}}^ \top } + {{\bf{W}}_k}{{\bf{k}}^ \top }) \in \mathbb {R} a(q,k)=wv⊤tanh(Wqq⊤+Wkk⊤)∈R是注意力评分函数
缩放点积注意力
q ∈ R 1 × d , k ∈ R 1 × d , v ∈ R 1 × v {\bf{q}} \in \mathbb{R}{^{1 \times d}},{\bf{k}} \in \mathbb{R}{^{1 \times d}},{\bf{v}} \in {{\mathbb R}^{1 \times v}} q∈R1×d,k∈R1×d,v∈R1×v
a ( q , k ) = 1 d q k ⊤ ∈ R a\left( {{\bf{q}},{\bf{k}}} \right) = \frac{1}{{\sqrt d }}{\bf{q}}{{\bf{k}}^ \top } \in \mathbb{R} a(q,k)=d1qk⊤∈R是注意力评分函数
f ( q , k , v ) = α ( q , k ) ⊤ v = s o f t m a x ( 1 d q k ⊤ ) v ∈ R 1 × v f({\bf{q}},{\bf{k}},{\bf{v}}) = \alpha {\left( {{\bf{q}},{\bf{k}}} \right)^ \top }{\bf{v}} = {\rm{softmax}}\left( {\frac{1}{{\sqrt d }}{\bf{q}}{{\bf{k}}^ \top }} \right){\bf{v}} \in {{\mathbb R}^{1 \times v}} f(q,k,v)=α(q,k)⊤v=softmax(d1qk⊤)v∈R1×v是注意力汇聚函数
n个查询和m个键-值对
Q ∈ R n × d , K ∈ R m × d , V ∈ R m × v \mathbf Q\in\mathbb R^{n\times d}, \mathbf K\in\mathbb R^{m\times d}, \mathbf V\in\mathbb R^{m\times v} Q∈Rn×d,K∈Rm×d,V∈Rm×v
a ( Q , K ) = 1 d Q K ⊤ ∈ R n × m {\bf{a}}\left( {{\bf{Q}},{\bf{K}}} \right) = \frac{1}{{\sqrt d }}{\bf{Q}}{{\bf{K}}^ \top } \in {\mathbb{R}^{n \times m}} a(Q,K)=d1QK⊤∈Rn×m是注意力评分函数
f ( Q , K , V ) = α ( Q , K ) ⊤ V = s o f t m a x ( 1 d Q K ⊤ ) V ∈ R n × v f({\bf{Q}},{\bf{K}},{\bf{V}}) = {\boldsymbol{\alpha}} {\left( {{\bf{Q}},{\bf{K}}} \right)^ \top }{\bf{V}} ={\rm{softmax}}\left( {\frac{1}{{\sqrt d }}{\bf{Q}}{{\bf{K}}^ \top }} \right){\bf{V}} \in {\mathbb{R}^{n \times v}} f(Q,K,V)=α(Q,K)⊤V=softmax(d1QK⊤)V∈Rn×v是注意力汇聚函数
多头注意力
q ∈ R 1 × d q , k ∈ R 1 × d k , v ∈ R 1 × d v {\bf{q}} \in {{\mathbb R}^{1 \times {d_q}}},{\bf{k}} \in {{\mathbb R}^{1 \times {d_k}}},{\bf{v}} \in {{\mathbb R}^{1 \times {d_v}}} q∈R1×dq,k∈R1×dk,v∈R1×dv
W i ( q ) ∈ R p q × d q , W i ( k ) ∈ R p k × d k , W i ( v ) ∈ R p v × d v {\bf{W}}_i^{(q)} \in {{\mathbb R}^{{p_q} \times {d_q}}},{\bf{W}}_i^{(k)} \in {{\mathbb R}^{{p_k} \times {d_k}}},{\bf{W}}_i^{(v)} \in {{\mathbb R}^{{p_v} \times {d_v}}} Wi(q)∈Rpq×dq,Wi(k)∈Rpk×dk,Wi(v)∈Rpv×dv
h i = f ( W i ( q ) q ⊤ , W i ( k ) k ⊤ , W i ( v ) v ⊤ ) ∈ R 1 × p v {{\bf{h}}_i} = f\left( {{\bf{W}}_i^{(q)}{{\bf{q}}^ \top },{\bf{W}}_i^{(k)}{{\bf{k}}^ \top },{\bf{W}}_i^{(v)}{{\bf{v}}^ \top }} \right) \in {{\mathbb R}^{{1 \times p_v}}} hi=f(Wi(q)q⊤,Wi(k)k⊤,Wi(v)v⊤)∈R1×pv是注意力头
W o ∈ R p o × h p v {{\bf{W}}_o} \in {{\mathbb R}^{{p_o} \times h{p_v}}} Wo∈Rpo×hpv
W o [ h 1 ⊤ ⋮ h h ⊤ ] ∈ R p o {{\bf{W}}_o}\left[ {\begin{array}{c} {{{\bf{h}}_1^ \top}}\\ \vdots \\ {{{\bf{h}}_h^ \top}} \end{array}} \right] \in {{\mathbb R}^{{p_o}}} Wo h1⊤⋮hh⊤ ∈Rpo
p q h = p k h = p v h = p o p_q h = p_k h = p_v h = p_o pqh=pkh=pvh=po

多头注意力:多个注意力头连结然后线性变换
自注意力
x i ∈ R 1 × d , X = [ x 1 ⋯ x n ] ∈ R n × d {{\bf{x}}_i} \in {{\mathbb R}^{1 \times d}},{\bf{X}} = \left[ {\begin{array}{c} {{{\bf{x}}_1}}\\ \cdots \\ {{{\bf{x}}_n}} \end{array}} \right] \in {{\mathbb R}^{n \times d}} xi∈R1×d,X= x1⋯xn ∈Rn×d
Q = X , K = X , V = X {\bf{Q}} = {\bf{X}},{\bf{K}} = {\bf{X}},{\bf{V}} = {\bf{X}} Q=X,K=X,V=X
f ( Q , K , V ) = α ( Q , K ) ⊤ V = s o f t m a x ( 1 d Q K ⊤ ) V ∈ R n × d f({\bf{Q}},{\bf{K}},{\bf{V}}) = {\boldsymbol{\alpha}} {\left( {{\bf{Q}},{\bf{K}}} \right)^ \top }{\bf{V}} ={\rm{softmax}}\left( {\frac{1}{{\sqrt d }}{\bf{Q}}{{\bf{K}}^ \top }} \right){\bf{V}} \in {\mathbb{R}^{n \times d}} f(Q,K,V)=α(Q,K)⊤V=softmax(d1QK⊤)V∈Rn×d
y i = f ( x i , ( x 1 , x 1 ) , … , ( x n , x n ) ) ∈ R d {{\bf{y}}_i} = f\left( {{{\bf{x}}_i},\left( {{{\bf{x}}_1},{{\bf{x}}_1}} \right), \ldots ,\left( {{{\bf{x}}_n},{{\bf{x}}_n}} \right)} \right) \in {{\mathbb R}^d} yi=f(xi,(x1,x1),…,(xn,xn))∈Rd
n个查询和m个键-值对
Q = t a n h ( W q X ) ∈ R n × d {\bf{Q}} = {\rm{tanh}}\left( {{{\bf{W}}_q}{\bf{X}}} \right) \in {{\mathbb R}^{n \times d}} Q=tanh(WqX)∈Rn×d
K = t a n h ( W k X ) ∈ R m × d {\bf{K}} = {\rm{tanh}}\left( {{{\bf{W}}_k}{\bf{X}}} \right) \in {{\mathbb R}^{m \times d}} K=tanh(WkX)∈Rm×d
V = t a n h ( W v X ) ∈ R m × v {\bf{V}} = {\rm{tanh}}\left( {{{\bf{W}}_v}{\bf{X}}} \right) \in {{\mathbb R}^{m \times v}} V=tanh(WvX)∈Rm×v
J. Xu, F. Zhong, and Y. Wang, “Learning multi-agent coordination for enhancing target coverage in directional sensor networks,” in Proc. Neural Information Processing Systems (NeurIPS), Vancouver, BC, Canada, Dec. 2020, pp. 1–16.
https://github.com/XuJing1022/HiT-MAC/blob/main/perception.py
x i ∈ R 1 × d i n , X = [ x 1 ⋯ x n m ] ∈ R n m × d i n {{\bf{x}}_i} \in {{\mathbb R}^{1 \times d_{in}}},{\bf{X}} = \left[ {\begin{array}{c} {{{\bf{x}}_1}}\\ \cdots \\ {{{\bf{x}}_{nm}}} \end{array}} \right] \in {{\mathbb R}^{nm \times d_{in}}} xi∈R1×din,X= x1⋯xnm ∈Rnm×din
W ∈ R d a t t × d i n {\bf{W}} \in {{\mathbb R}^{d_{att}\times d_{in}}} W∈Rdatt×din
Q = t a n h ( W q X ⊤ ) ⊤ ∈ R n m × d a t t {\bf{Q}} = {\rm{tanh}}\left( {{{\bf{W}}_q}{\bf{X}}^\top} \right)^\top \in {{\mathbb R}^{nm \times d_{att}}} Q=tanh(WqX⊤)⊤∈Rnm×datt
K = t a n h ( W k X ⊤ ) ⊤ ∈ R n m × d a t t {\bf{K}} = {\rm{tanh}}\left( {{{\bf{W}}_k}{\bf{X}}^\top} \right)^\top \in {{\mathbb R}^{nm \times d_{att}}} K=tanh(WkX⊤)⊤∈Rnm×datt
V = t a n h ( W v X ⊤ ) ⊤ ∈ R n m × d a t t {\bf{V}} = {\rm{tanh}}\left( {{{\bf{W}}_v}{\bf{X}}^\top} \right)^\top \in {{\mathbb R}^{nm \times d_{att}}} V=tanh(WvX⊤)⊤∈Rnm×datt
f ( Q , K , V ) = α ( Q , K ) ⊤ V = s o f t m a x ( 1 d Q K ⊤ ) V ∈ R n m × d a t t f({\bf{Q}},{\bf{K}},{\bf{V}}) = {\boldsymbol{\alpha}} {\left( {{\bf{Q}},{\bf{K}}} \right)^ \top }{\bf{V}} ={\rm{softmax}}\left( {\frac{1}{{\sqrt d }}{\bf{Q}}{{\bf{K}}^ \top }} \right){\bf{V}} \in {{\mathbb R}^{nm \times d_{att}}} f(Q,K,V)=α(Q,K)⊤V=softmax(d1QK⊤)V∈Rnm×datt
class AttentionLayer(torch.nn.Module):def __init__(self, feature_dim, weight_dim, device):super(AttentionLayer, self).__init__()self.in_dim = feature_dimself.device = deviceself.Q = xavier_init(nn.Linear(self.in_dim, weight_dim))self.K = xavier_init(nn.Linear(self.in_dim, weight_dim))self.V = xavier_init(nn.Linear(self.in_dim, weight_dim))self.feature_dim = weight_dimdef forward(self, x):# param x: [num_agent, num_target, in_dim]# return z: [num_agent, num_target, weight_dim]# z = softmax(Q,K)*Vq = torch.tanh(self.Q(x)) # [batch_size, sequence_len, weight_dim]k = torch.tanh(self.K(x)) # [batch_size, sequence_len, weight_dim]v = torch.tanh(self.V(x)) # [batch_size, sequence_len, weight_dim]z = torch.bmm(F.softmax(torch.bmm(q, k.permute(0, 2, 1)), dim=2), v) # [batch_size, sequence_len, weight_dim]global_feature = z.sum(dim=1)return z, global_feature
Transformer

相关文章:
注意力机制 attention Transformer 笔记
动手学深度学习 这里写自定义目录标题 注意力加性注意力缩放点积注意力多头注意力自注意力Transformer 注意力 注意力汇聚的输出为值的加权和 查询的长度为q,键的长度为k,值的长度为v。 q ∈ 1 q , k ∈ 1 k , v ∈ R 1 v {\bf{q}} \in {^{1 \times…...
开始尝试从0写一个项目--后端(二)
实现学生管理 新增学生 接口设计 请求路径:/admin/student 请求方法:POST 请求参数:请求头:Headers:"Content-Type": "application/json" 请求体:Body: id 学生id …...
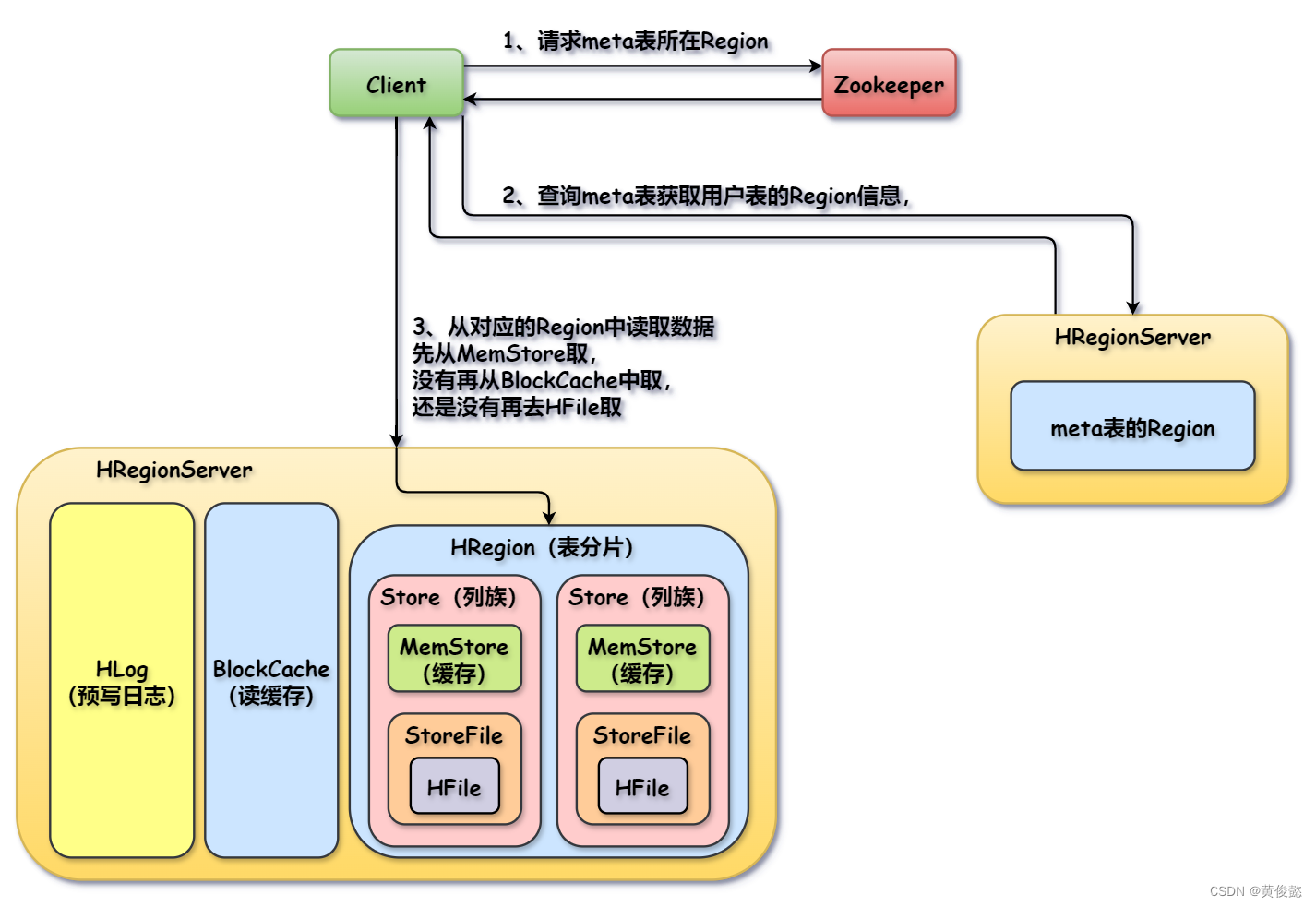
【图解大数据技术】Hive、HBase
【图解大数据技术】Hive、HBase Hive数据仓库Hive的执行流程Hive架构数据导入Hive HBaseHBase简介HBase架构HBase的列式存储HBase建表流程HBase数据写入流程HBase数据读取流程 Hive Hive是基于Hadoop的一个数据仓库工具,Hive的数据存储在HDFS上,底层基于…...
)
composables 目录下的文件(web前端)
composables 目录通常用于存放可组合的函数或逻辑,这些函数或逻辑可以在不同的组件中复用。具体来说,composables 目录下的文件通常包含以下内容: 组合式函数 (Composable Functions): 这些函数利用 Vue 3 的组合式 API࿰…...

使用Python绘制堆积柱形图
使用Python绘制堆积柱形图 堆积柱形图效果代码 堆积柱形图 堆积柱形图(Stacked Bar Chart)是一种数据可视化图表,用于显示不同类别的数值在某一变量上的累积情况。每一个柱状条显示多个子类别的数值,子类别的数值在柱状条上堆积在…...

DP:二维费用背包问题
文章目录 🎵二维费用背包问题🎶引言🎶问题定义🎶动态规划思想🎶状态定义和状态转移方程🎶初始条件和边界情况 🎵例题🎶1.一和零🎶2.盈利计划 🎵总结 …...

C语言标准库中的函数
由于C语言标准库中的函数非常多,我将按类别列出一些常见函数及其作用。请注意,这里不可能列出所有函数,但我会尽量覆盖主要的类别和函数。 ### 标准输入输出 - printf: 格式化输出到标准输出(通常是屏幕)。 - scanf: …...

Qt5.9.9 关于界面拖动导致QModbusRTU(QModbusTCP没有测试过)离线的问题
问题锁定 参考网友的思路: Qt5.9 Modbus request timeout 0x5异常解决 网友认为是Qt的bug, 我也认同;网友认为可以更新模块, 我也认同, 我也编译了Qt5.15.0的code并成功安装到Qt5.9.9中进行使用,界面拖…...

API的定义理解
前言 在程序员的日常工作中,“API”这个词在程序员的口中重复的次数,绝对是名列前茅的。 但是对刚开始工作的新人来说,API这个概念还是比较模糊。 确实,API这个概念是随着语义环境而不一样的,所以会让人迷惑。 下面…...

启航IT之旅:高考假期预习指南
标题:启航IT之旅:高考假期预习指南 随着高考的落幕,许多有志于IT领域的学子们即将踏上新的学习旅程。这个假期,是他们探索IT世界的黄金时期。本文将为准IT新生们提供一份全面的预习指南,帮助他们为未来的学习和职业生…...

HarmonyOS开发:循环渲染ForEach
需求: 创建多个列表组件,并实现点赞功能 语言: ArkTS 平台: DevEco Studio ForEach 接口描述 ForEach( arr: Array, itemGenerator: (item: Object, index: number) > void, keyGenerator?: (item: Object, index: number) &…...

构建工程化:多种不同的工程体系如何编写MakeFile
源码分析 核心MakeFile 这个 Makefile 是一个复杂的构建脚本,用于管理和构建一个大型项目。它包括多个目标、条件判断和递归调用 make 命令来处理多个子项目和子目录。让我们逐部分进行详细解析。 伪目标和变量定义 .PHONY: all clean install build test init.…...

聚焦从业人员疏散逃生避险意识能力提升,推动生产经营单位每年至少组织开展(疏散逃生演练,让全体从业人员熟知逃生通道、安全出口及应急处置要求,形成常态化机制。
聚焦从业人员疏散逃生避险意识能力提升,推动生产经营单位每年至少组织开展(疏散逃生演练,让全体从业人员熟知逃生通道、安全出口及应急处置要求,形成常态化机制。完整试题答案查看 A.三次B.两次C.一次 综合运用“四不两直”、明察暗访、 ()、…...
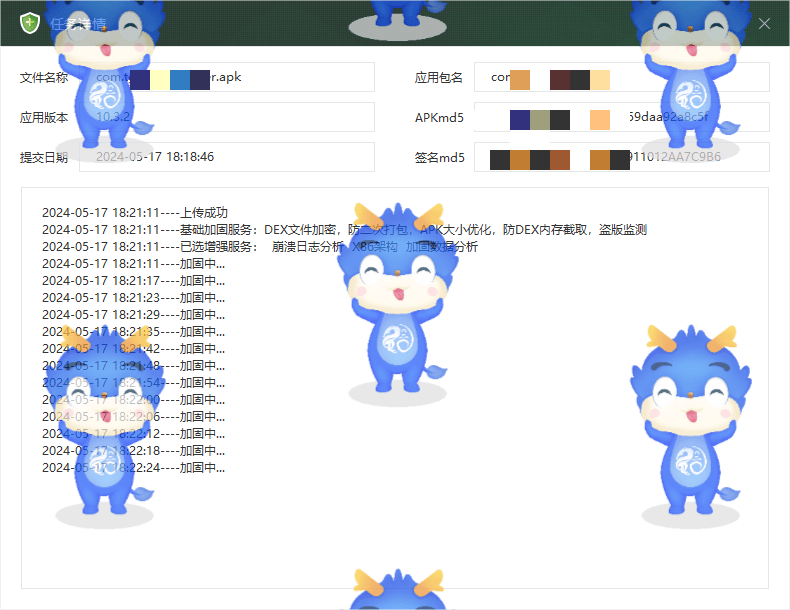
【手机取证】如何使用360加固助手给apk加固
文章关键词:手机取证、电子数据取证、数据恢复 一、前言 APP加固是对APP代码逻辑的一种保护。原理是将应用文件进行某种形式的转换,包括不限于隐藏,混淆,加密等操作,进一步保护软件的利益不受损坏,下面给…...

Vue的介绍
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…...

MySql数据库常用指令合集
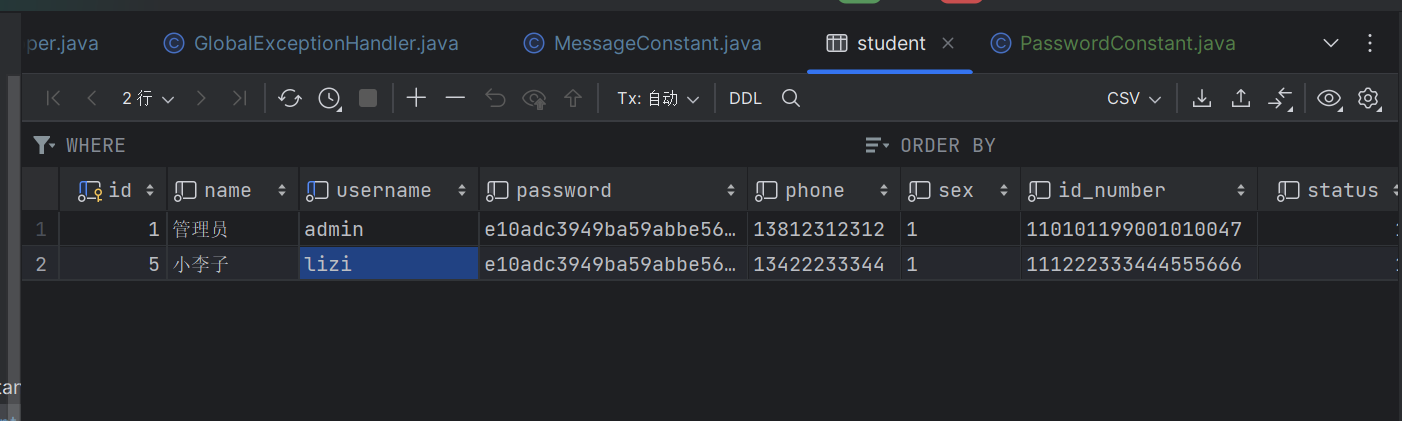
MySql数据库常用指令合集 一、创建数据库db11.创建表 字段---表头 student_no,username,sex2.新增单条插入多条插入3.删除4.更新5.查询5.1.查询该表全部信息5.2.查询该表中username,并且要求名字为zhangsan性别女,还可以用(or) 6.…...
编辑 13 注解)
ArcGIS Pro SDK (七)编辑 13 注解
ArcGIS Pro SDK (七)编辑 13 注解 文章目录 ArcGIS Pro SDK (七)编辑 13 注解1 注释构建工具2 以编程方式启动编辑批注3 更新批注文本4 修改批注形状5 修改批注文本图形6 接地到网格 环境:Visual Studio 2022 .NET6 …...

模拟面试001-Java开发工程师+简历+问题+回答
模拟面试001-Java开发工程师简历问题回答 目录 模拟面试001-Java开发工程师简历问题回答面试简历面试官题问求职者回答1. 关于Java编程和技术栈2. 关于XX在线购物平台项目3. 关于XX企业资源规划系统项目4. 团队协作与项目管理5. 个人发展与职业规划 参考资料 面试简历 **个人信…...

微信小程序 ——入门介绍及简单的小程序编写
目录 一、小程序入门 1.1 什么是小程序 1.2 小程序的优点 1.3 小程序注册 1.4 安装开发工具 1.5 创建第一个小程序 二、小程序目录结构及入门案例 2.1 目录结构 2.2 入门案例 2.2.1 创建界面 2.2.2 设置标题 2.2.3 编写WXML文件 2.2.4 编写JS文件 2.2.5 编写WXSS…...

ubuntu20.04安装lio-sam
1、依赖功能包安装 sudo apt install ros-noetic-robot-state-publisher sudo apt-get install ros-noetic-robot-localization libmetis-dev 2、boost版本 boost版本查看:cat /usr/include/boost/version.hpp | grep "BOOST_LIB_VERSION" boost版本为1.…...

Hirschmann RS20-0800M4M4SDAE工业以太网交换机
Hirschmann RS20-0800M4M4SDAE 工业以太网交换机产品特点:端口配置:共8个端口,含6个RJ45电口和2个ST光纤接口。端口速率:所有端口均为100Mbps快速以太网。光纤类型:2个光纤端口为多模、ST接头。管理类型:二…...

别再死记硬背SMO公式了!用Python手写一个SVM分类器,带你一步步拆解SMO核心逻辑
用Python手写SVM分类器:代码驱动理解SMO算法核心在机器学习领域,支持向量机(SVM)以其优秀的分类性能和坚实的数学基础著称。然而,许多学习者在理解其核心算法——序列最小优化(SMO)时,往往被复杂的数学推导所困扰。本文将采用一种…...

基于LM22678的树莓派硬盘专用电源设计:解决供电不稳与电流冲击
1. 项目概述:为什么我们需要一个“专用”电源?如果你正在用树莓派搭配一块机械硬盘搭建一个家庭服务器或者个人云存储,可能已经遇到了一个不大不小的麻烦:供电不稳。树莓派官方推荐的5V/3A电源,单独带树莓派4B跑满负载…...

Simulink中Repeating Sequence锯齿波显示恒为0解决方案
锯齿波设置如图1时,其示波器显示恒为0(如图2)。图1图2于是新建模型,只添加Repeating Sequence模块,采用原始设置发现可以正常输出锯齿波,于是调整时间参数,发现当时间设置为≥[0 0.06]时可以正常…...
上午题回忆与解析(非标答版))
2026上半年数据库系统工程师(软考)上午题回忆与解析(非标答版)
本文为考后回忆整理,非官方标准答案,旨在为考后对答案及下半年备考的同学提供参考。题目顺序和表述可能与原卷有出入,欢迎在评论区指正、补充。📊 整体考情分析 刚结束的2026年上半年数据库系统工程师考试,上午题的风格…...

FM3773 低功耗离线式恒流/恒压 PSR 控制器
概述 FM3773 是一种高性能的交流/直流用于电池充电器和适配器的电源控制器,内置 850V 功率三极管。该设备采用脉冲频率调制(PFM)的方法来建立非连续导通模式(DCM)反激式电源。 FM3773 提供精确的恒定电压,恒…...

0.2毫秒快速启动的操作系统
在工业控制以及航空航天等核心场景,极速启动就是高可靠系统的生命线。0.2毫秒超快启动搭配硬件看门狗,让设备在掉电重启、异常恢复时瞬时归位,关键任务永不延误! https://www.bilibili.com/video/BV11mLY6VERt/?spm_id_from333.1…...
)
别再手动编译了!Matlab一键调用CEC2017测试函数的完整配置指南(附30个函数调用示例)
别再手动编译了!Matlab一键调用CEC2017测试函数的完整配置指南(附30个函数调用示例) 算法研究者们常常需要借助标准测试函数来验证优化算法的性能,而CEC2017测试函数集因其复杂性和多维度的挑战性,成为评估算法鲁棒性的…...

Android Root检测绕过:从逆向分析到Frida分层Hook实战
1. 这不是“绕过root检测”,而是理解检测逻辑后的精准干预在安卓逆向工程的实际工作中,“过root检测”这个说法本身就容易引发误解——它听起来像某种黑箱魔法,仿佛只要套用某个脚本、加载某个插件,就能让App对设备状态“视而不见…...

ZYNQ中断避坑指南:PL端信号线如何正确‘连线’到PS端处理函数?
ZYNQ中断系统深度解析:从硬件信号到软件响应的全链路实践 在嵌入式系统开发中,中断处理是实时响应的核心机制。对于ZYNQ这种集成了ARM处理器(PS)和可编程逻辑(PL)的异构计算平台,其中断系统既有传统处理器的特性,又具备FPGA灵活定…...