Open3D 点云CPD算法配准(粗配准)
目录
一、概述
二、代码实现
2.1关键函数
2.2完整代码
三、实现效果
3.1原始点云
3.2配准后点云
一、概述
在Open3D中,CPD(Coherent Point Drift,一致性点漂移)算法是一种经典的点云配准方法,适用于无序点云的非刚性(非刚体)配准问题。CPD算法通过建模点云之间的概率关系,以最大化对应点对之间的一致性来实现配准。以下是CPD算法的详细原理介绍:
CPD算法通过以下步骤来实现点云的非刚性配准:
1.问题建模:
假设有两个点云:源点云(source)和目标点云(target)。目标是找到一个概率转移矩阵和变换矩阵,将源点云的点映射到目标点云上,同时考虑点之间的一致性和概率分布。
2.概率分布建模:
- 假设每个源点在目标点云上的对应位置服从高斯分布。
- 建立概率转移矩阵P来表示每个源点对目标点的概率。
3.优化目标:
CPD算法通过最大化点云之间的一致性来优化配准结果。具体来说,它最小化源点云与目标点云之间的KL散度(Kullback-Leibler divergence),以确定最佳的变换和对应关系。
4.迭代优化:
CPD算法使用迭代方法来逐步优化变换矩阵和概率转移矩阵。每次迭代包括两个主要步骤:
- E步骤(Expectation):更新每个源点的对应概率,基于当前的变换矩阵和目标点云的位置。
- M步骤(Maximization):更新变换矩阵,将源点云映射到目标点云上,最大化对应点对之间的一致性。
5.收敛判据:
CPD算法通常会设定迭代次数或者设定一个收敛准则来终止迭代过程,例如KL散度变化小于某个阈值或者达到最大迭代次数。
二、代码实现
2.1关键函数
def registration_cpd(source, target, tf_type_name='rigid',w=0.0, maxiter=50, tol=0.001,callbacks=[], **kargs):
- tf_type_name (str, optional):转换类型(‘刚性’,‘仿射’,‘非刚性’)
- w (float, optional):均匀分布的权重,0 < ’ w ’ < 1。
- maxitr (int, optional):EM算法的最大迭代次数。
- tol (float, optional): 停止迭代的最小容忍偏差
2.2完整代码
import open3d as o3d
import numpy as np
from probreg import cpd
import time
import copy# --------------------读取点云数据------------------
source = o3d.io.read_point_cloud("..//..//standford_cloud_data//Horse.pcd")
target = o3d.io.read_point_cloud("..//..//standford_cloud_data//Horse_trans.pcd")source = source.uniform_down_sample(every_k_points=10)
target = target.uniform_down_sample(every_k_points=10)# 点云上色
source.paint_uniform_color([0, 0, 1])
target.paint_uniform_color([0, 1, 0])
o3d.visualization.draw_geometries([source, target], window_name="点云初始位置",width=1024, height=768,left=50, top=50,mesh_show_back_face=False) # 可视化点云初始位置
# CPD算法进行配准
start = time.time()
tf_param, _, _ = cpd.registration_cpd(source, target, # 源点云和目标点云tf_type_name='rigid', # 计算变换矩阵的类型('rigid', 'affine', 'nonrigid')w=0.0, # 均匀分布的权重,0 < ' w ' < 1。maxiter=50, # EM算法的最大迭代次数。tol=0.001) # 停止迭代的最小容忍偏差
result = copy.deepcopy(source)
result.points = tf_param.transform(result.points)
print("配准用时: %.3f sec.\n" % (time.time() - start))
# 可视化配准结果
target.paint_uniform_color([1, 0, 0])
result.paint_uniform_color([0, 0, 1])
o3d.visualization.draw_geometries([target, result], window_name="CPD算法配准",width=1024, height=768,left=50, top=50,mesh_show_back_face=False)三、实现效果
3.1原始点云
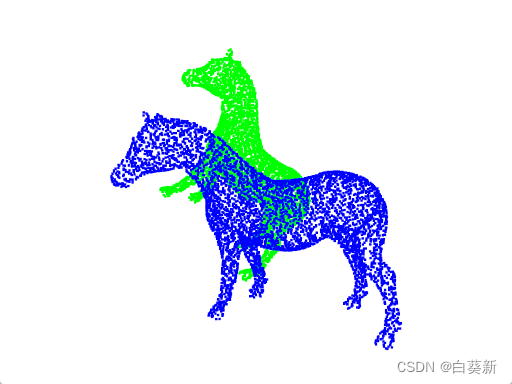
3.2配准后点云

相关文章:
Open3D 点云CPD算法配准(粗配准)
目录 一、概述 二、代码实现 2.1关键函数 2.2完整代码 三、实现效果 3.1原始点云 3.2配准后点云 一、概述 在Open3D中,CPD(Coherent Point Drift,一致性点漂移)算法是一种经典的点云配准方法,适用于无序点云的非…...
04-ArcGIS For JavaScript的可视域分析功能
文章目录 综述代码实现代码解析结果 综述 在数字孪生或者实景三维的项目中,视频融合和可视域分析,一直都是热点问题。Cesium中,支持对阴影的后处理操作,通过重新编写GLSL代码就能实现视域和视频融合的功能。ArcGIS之前支持的可视…...

Nestjs基础
一、创建项目 1、创建 安装 Nest CLI(只需要安装一次) npm i -g nestjs/cli 进入要创建项目的目录,使用 Nest CLI 创建项目 nest new 项目名 运行项目 npm run start 开发环境下运行,自动刷新服务 npm run start:dev 2、…...

DDL:针对于数据库、数据表、数据字段的操作
数据库的操作 # 查询所有数据 SHOW DATABASE; #创建数据库 CREATE DATABASE 2404javaee; #删除数据库 DROP DATABASE 2404javaee; 数据表的操作 #创建表 CREATE TABLE s_student( name VARCHAR(64), s_sex VARCHAR(32), age INT(3), salary FLOAT(8,2), c_course VARC…...
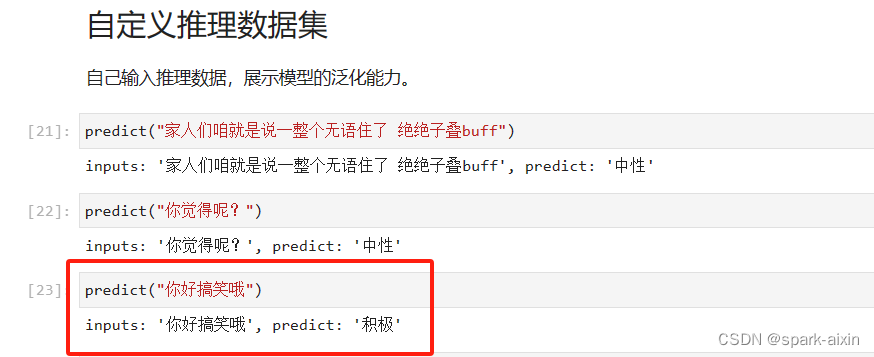
昇思学习打卡-5-基于Mindspore实现BERT对话情绪识别
本章节学习一个基本实践–基于Mindspore实现BERT对话情绪识别 自然语言处理任务的应用很广泛,如预训练语言模型例如问答、自然语言推理、命名实体识别与文本分类、搜索引擎优化、机器翻译、语音识别与合成、情感分析、聊天机器人与虚拟助手、文本摘要与生成、信息抽…...
 List中增删改查的注意事项)
Java中 普通for循环, 增强for循环( foreach) List中增删改查的注意事项
文章目录 俩种循环遍历增加删除1 根据index删除2 根据对象删除 修改 俩种循环 Java中 普通for循环, 增强for循环( foreach) 俩种List的遍历方式有何异同,性能差异? 普通for循环(使用索引遍历): for (int…...
昇思25天学习打卡营第19天|LSTM+CRF序列标注
概述 序列标注指给定输入序列,给序列中每个Token进行标注标签的过程。序列标注问题通常用于从文本中进行信息抽取,包括分词(Word Segmentation)、词性标注(Position Tagging)、命名实体识别(Named Entity Recognition, NER)等。 条件随机场(…...

微服务: 初识 Spring Cloud
什么是微服务? 微服务就像把一个大公司拆成很多小部门,每个部门各自负责一块业务。这样一来,每个部门都可以独立工作,即使一个部门出了问题,也不会影响整个公司运作。 什么是Spring Cloud? Spring Cloud 是一套工具包&#x…...

探索InitializingBean:Spring框架中的隐藏宝藏
🌈 个人主页:danci_ 🔥 系列专栏:《设计模式》《MYSQL》 💪🏻 制定明确可量化的目标,坚持默默的做事。 ✨欢迎加入探索MYSQL索引数据结构之旅✨ 👋 Spring框架的浩瀚海洋中&#x…...

JVM专题之垃圾收集算法
标记清除算法 第一步:标记 (找出内存中需要回收的对象,并且把它们标记出来) 第二步:清除 (清除掉被标记需要回收的对象,释放出对应的内存空间) 缺点: 标记清除之后会产生大量不连续的内存碎片,空间碎片太多可能会导致以后在程序运行过程中需 要分配较大对象时,无法找到…...
2024年6月后2周重要的大语言模型论文总结:LLM进展、微调、推理和对齐
本文总结了2024年6月后两周发表的一些最重要的大语言模型论文。这些论文涵盖了塑造下一代语言模型的各种主题,从模型优化和缩放到推理、基准测试和增强性能。 LLM进展与基准 1、 BigCodeBench: Benchmarking Code Generation with Diverse Function Calls and Com…...
)
大数据面试题之数仓(1)
目录 介绍下数据仓库 数仓的基本原理 数仓架构 数据仓库分层(层级划分),每层做什么?分层的好处? 数据分层是根据什么? 数仓分层的原则与思路 知道数仓建模常用模型吗?区别、优缺点? 星型模型和雪花模型的区别?应用场景?优劣对比 数仓建模有哪些方式…...
[机器学习]-4 Transformer介绍和ChatGPT本质
Transformer Transformer是由Vaswani等人在2017年提出的一种深度学习模型架构,最初用于自然语言处理(NLP)任务,特别是机器翻译。Transformer通过自注意机制和完全基于注意力的架构,核心思想是通过注意力来捕捉输入序列…...

基于深度学习的电力分配
基于深度学习的电力分配是一项利用深度学习算法优化电力系统中的电力资源分配、负荷预测、故障检测和系统管理的技术。该技术旨在提高电力系统的运行效率、稳定性和可靠性。以下是关于这一领域的系统介绍: 1. 任务和目标 电力分配的主要任务是优化电力系统中的电力…...
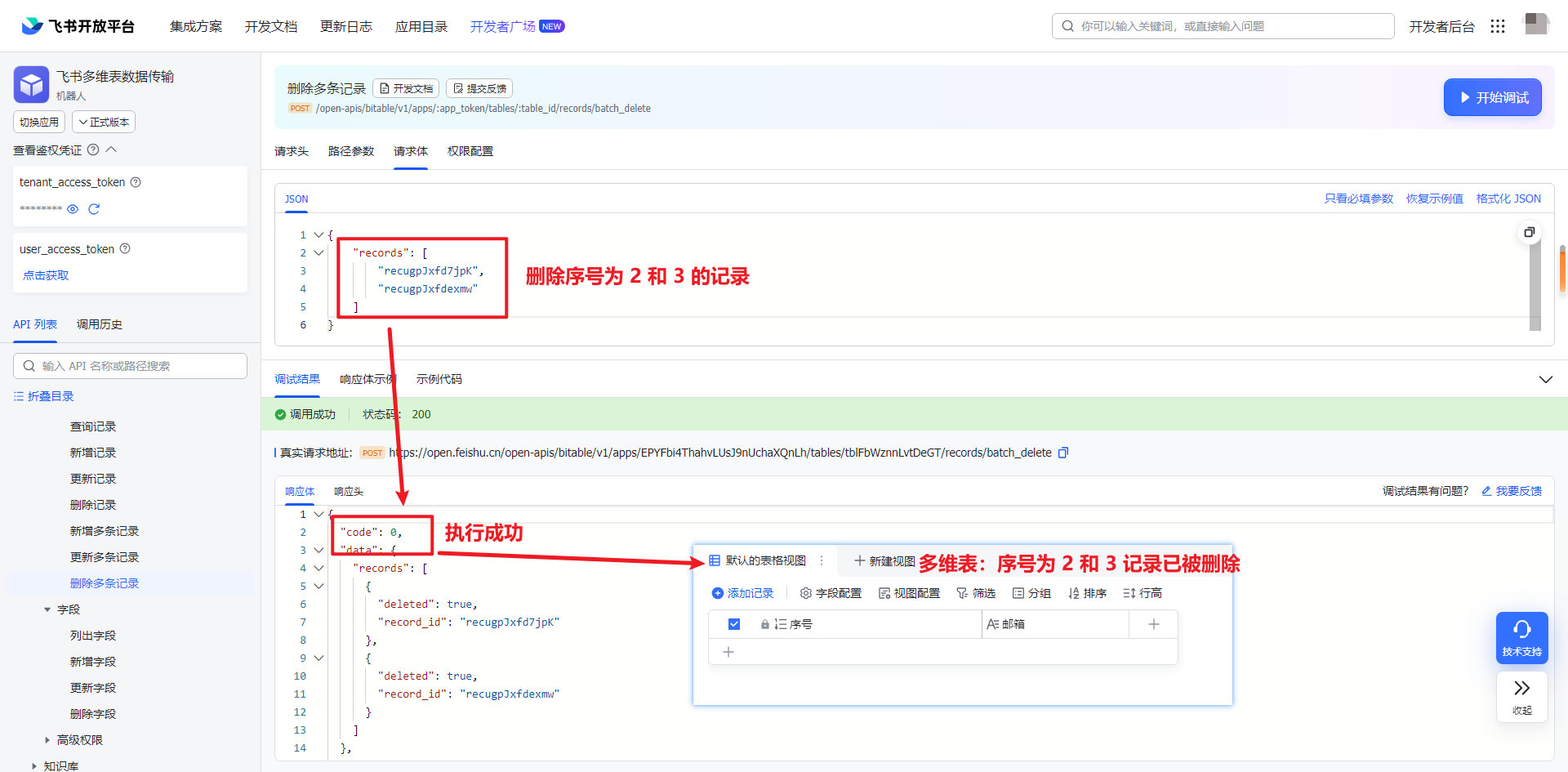
飞书 API 2-4:如何使用 API 将数据写入数据表
一、引入 上一篇创建好数据表之后,接下来就是写入数据和对数据的处理。 本文主要探讨数据的插入、更新和删除操作。所有的操作都是基于上一篇(飞书 API 2-4)创建的数据表进行操作。上面最终的数据表只有 2 个字段:序号和邮箱。序…...

系统设计题-日活月活统计
一、题目描述 根据访问日志统计接口的日活和月活。日志格式为 yyyy-mm-dd|clientIP|url|result 其中yyyy-mm-dd代表年月日,一个日志文件中时间跨度保证都在同一个月内,但不保证每行是按照日期顺序。 clientIP为合法的点分十进制ipv4地址(1.1.1.1和1.01.…...

在CentOS7云服务器下搭建MySQL网络服务详细教程
目录 0.说明 1.卸载不要的环境 1.1查看当前环境存在的服务mysql或者mariadb 1.2卸载不要的环境 1.2.1先关闭相关的服务 1.2.2查询曾经下载的安装包 1.2.3卸载安装包 1.2.4检查是否卸载干净 2.配置MySQLyum源 2.1获取mysql关外yum源 2.2 查看当前系统结合系统配置yum…...

【数据结构与算法】快速排序霍尔版
💓 博客主页:倔强的石头的CSDN主页 📝Gitee主页:倔强的石头的gitee主页 ⏩ 文章专栏:《数据结构与算法》 期待您的关注 ...

无人机5公里WiFi低延迟图传模组,抗干扰、长距离、低延迟,飞睿智能无线通信新标杆
在科技日新月异的今天,我们见证了无数通信技术的飞跃。从开始的电报、电话,到如今的4G、5G网络,再到WiFi的广泛应用,每一次技术的革新都极大地改变了人们的生活方式。飞睿智能5公里WiFi低延迟图传模组,它以其独特的优势…...

Kappa架构
1.Kappa架构介绍 Kappa架构由Jay Kreps提出,不同于Lambda同时计算和批计算并合并视图,Kappa只会通过流计算一条的数据链路计算并产生视图。Kappa同样采用了重新处理事件的原则,对于历史数据分析类的需求,Kappa要求数据的长期存储能…...

Nano-Banana入门指南:理解Knolling平铺与Exploded View差异及适用场景
Nano-Banana入门指南:理解Knolling平铺与Exploded View差异及适用场景 你是不是经常在网上看到那些把产品零件整整齐齐铺开、或者像爆炸一样散开的酷炫图片?这些图片在电商展示、产品说明书或者技术教程里特别常见,能让人一眼就看清楚产品的…...

【深度评测】C盘爆满别慌!小番茄C盘清理的五大核心功能实测
1. 为什么你的C盘总是爆满? 每次打开电脑看到C盘飘红,是不是感觉血压都上来了?作为一个常年和磁盘空间斗智斗勇的老司机,我发现C盘爆满的原因远比想象中复杂。系统更新残留、软件缓存堆积、临时文件泛滥...这些"隐形杀手&quo…...

如何快速解锁《原神》60FPS限制:终极帧率提升指南
如何快速解锁《原神》60FPS限制:终极帧率提升指南 【免费下载链接】genshin-fps-unlock unlocks the 60 fps cap 项目地址: https://gitcode.com/gh_mirrors/ge/genshin-fps-unlock 还在为《原神》60帧限制而烦恼吗?你的高刷新率显示器是否被游戏…...

学习C语言的第一周
大家好啊,我是一名C语言编程小白。 我计划每周投入14小时学习编程,目标是独立写出上万行代码, 并凭借自己的努力,未来能够加入米哈游。...

3种方法让旧打印机秒变AirPrint:Docker容器化改造指南
3种方法让旧打印机秒变AirPrint:Docker容器化改造指南 【免费下载链接】cups-avahi-airprint Docker image for CUPS intended as an AirPrint relay 项目地址: https://gitcode.com/gh_mirrors/cu/cups-avahi-airprint 你是否曾遇到过这样的场景:…...

Ubuntu 是什么?能干嘛?为啥 90% 的开发者都选它?一文读懂开源操作系统的王者之道!
Ubuntu是什么?能干嘛?为啥90%的开发者都选它?一文读懂开源操作系统的王者之道! 摘要:Ubuntu作为全球最受欢迎的Linux发行版,占据Linux桌面市场40%以上份额,云端市场份额高达70%。本文将深入解析…...

告别乱码!Win11下Bandizip+Notepad++组合拳完美解决中文压缩包问题
告别乱码!Win11下BandizipNotepad组合拳完美解决中文压缩包问题 每次解压中文压缩包时看到满屏的"锟斤拷"和"烫烫烫",是不是瞬间血压飙升?作为开发者,我们每天要处理大量压缩文件,而编码问题就像隐…...

Baichuan-7B模型压缩终极指南:如何在保持性能的同时大幅减小模型体积
Baichuan-7B模型压缩终极指南:如何在保持性能的同时大幅减小模型体积 【免费下载链接】Baichuan-7B A large-scale 7B pretraining language model developed by BaiChuan-Inc. 项目地址: https://gitcode.com/gh_mirrors/ba/Baichuan-7B Baichuan-7B是由百川…...

SenseVoice-Small ONNX模型效果惊艳展示:中英粤日韩五语种同步识别样例
SenseVoice-Small ONNX模型效果惊艳展示:中英粤日韩五语种同步识别样例 今天,我想带大家看一个让我眼前一亮的语音识别模型——SenseVoice-Small的ONNX版本。它最吸引我的地方,是能同时识别中文、英文、粤语、日语和韩语,而且速度…...

GPU显存友好!Ostrakon-VL-8B Bfloat16加速部署详解
GPU显存友好!Ostrakon-VL-8B Bfloat16加速部署详解 1. 项目背景与核心价值 Ostrakon-VL-8B是一款专为零售与餐饮场景优化的多模态大模型,能够高效处理商品识别、货架分析等视觉任务。传统部署方案往往面临显存占用高、推理速度慢的问题,而本…...