Ubuntu20.04配置TurtleBot3 Waffle Pi远程控制
这里写目录标题
- 0. 机器人配置
- 1. Ubuntu20.04配置TurtleBot3 Waffle Pi远程控制
- 1.1 TurtleBot3 Waffle Pi端配置
- 1.2 PC端配置
- 1.2.1 安装turtlebot3的环境配置
- 1.2.2 创建项目并安装Turtlebot3
- 1.2.3 配置环境变量
- 1.3 PC端与TurtleBot3进行通信
- 1.3.1 PC端与机器人端互PING和SSH连接
- 1.3.2 PC端与机器人端运行互联
- 1.3.3 PC端控制机器人进行运动
0. 机器人配置
机器人名称:TurtleBot3 Waffle Pi
开发板:jetson xavier NX
激光雷达:RPLIDAR A2
深度视觉传感器:RealSense D435i
驱动形式:两轮差速驱动
1. Ubuntu20.04配置TurtleBot3 Waffle Pi远程控制
1.1 TurtleBot3 Waffle Pi端配置
默认为根据基本教程安装完成完机器人端的配置
1.2 PC端配置
默认为已经成功安装好Ubuntu20.04和ROS环境
1.2.1 安装turtlebot3的环境配置
其中的noetic根据自己的Ubuntu版本进行调整,这里使用的是Ubuntu20.04
sudo apt-get install ros-noetic-joy ros-noetic-teleop-twist-joy ros-noetic-teleop-twist-keyboard ros-noetic-laser-proc ros-noetic-rgbd-launch ros-noetic-depthimage-to-laserscan ros-noetic-rosserial-arduino ros-noetic-rosserial-python ros-noetic-rosserial-server ros-noetic-rosserial-client ros-noetic-rosserial-msgs ros-noetic-amcl ros-noetic-map-server ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro ros-noetic-compressed-image-transport ros-noetic-rqt-image-view ros-noetic-gmapping ros-noetic-navigation ros-noetic-interactive-markers rviz
1.2.2 创建项目并安装Turtlebot3
mkdir catkin_turtlebot3
cd catkin_turtlebot3
mkdir src
cd src
git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
cd ..
catkin_make
1.2.3 配置环境变量
其中turtlebot3_model根据自己的机器人具体类型进行设置(主要有三个选项burger,waffle,waffle_pi),第二行是设置ros的工作环境
echo "export TURTLEBOT3_MODEL=waffle_pi" >> ~/.bashrc
echo "source ~/catkin_turtlebot3/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc

利用以下命令测试是否设置成功
echo $ROS_PACKAGE_PATH

接下来PC端的基本设置就完成了。
1.3 PC端与TurtleBot3进行通信
1.3.1 PC端与TurtleBot3在同一局域网下,即连接同一WIFI情况下
1.3.1 PC端与机器人端互PING和SSH连接
[TurtleBot端]
通过ifconfig查看对应的IP地址
ifconfig
[PC端]
通过ifconfig查看对应的IP地址
ifconfig
在PC端和机器人端进行测试,分别从机器人端pingPC端的IP地址和在PC端ping机器人端的IP地址,确保机器人端和PC端是可以双向ping通,同时双向测试ssh是否可以直接连上双方,才进行下一步。此操作建议关闭防火墙功能
[TurtleBot端]
在~/.bashrc里面添加对应的远程PC端的IP地址,其中 ROS_MASTER_URI填写的是PC端的IP地址,ROS_HOSTNAME填写的自己的IP地址
sudo vim ~/.bashrc
export ROS_MASTER_URI=http://192.168.31.105:11311
export ROS_HOSTNAME=192.168.31.106
source ~/.bashrc
1.3.2 PC端与机器人端运行互联
[PC端]
运行roscore下面的命令
roscore
[TurtleBot3端]
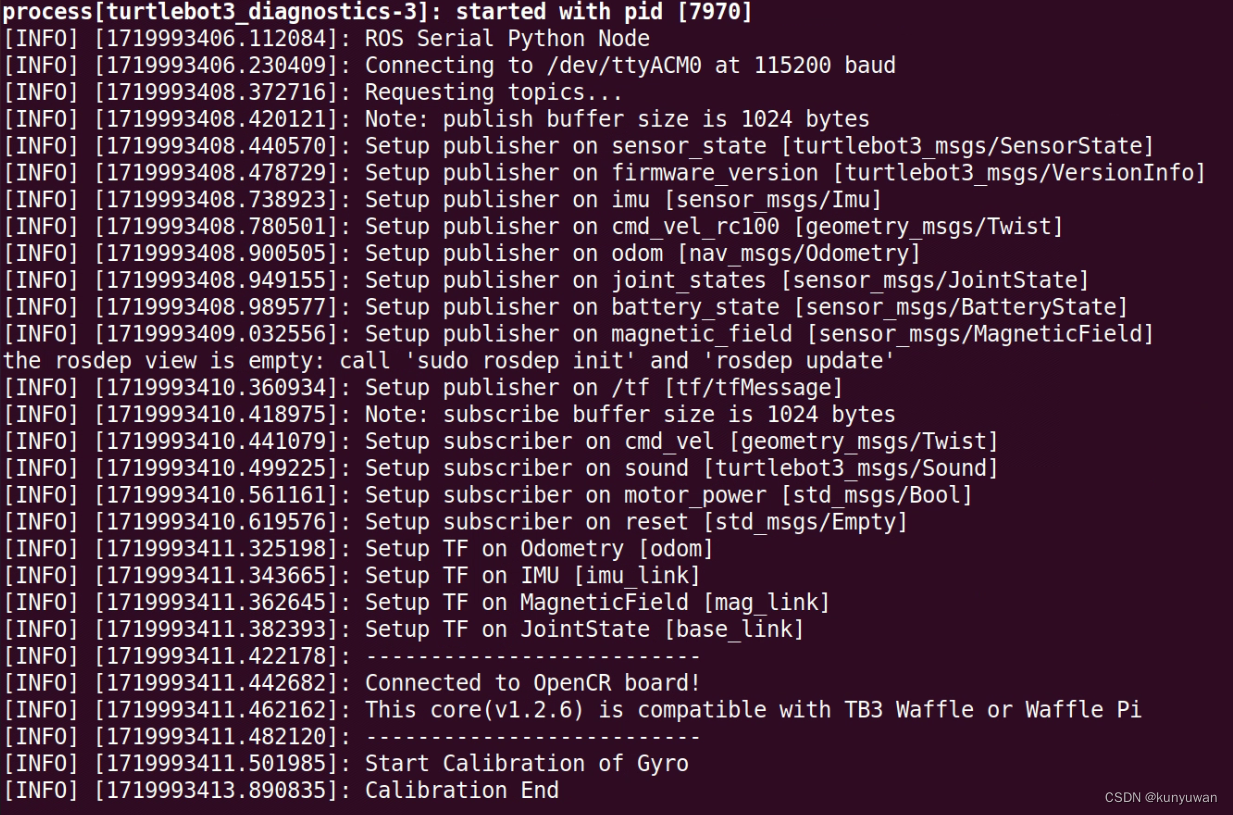
运行roslaunch turtlebot3_bringup turtlebot3_robot.launch
roslaunch turtlebot3_bringup turtlebot3_robot.launch
展示如下界面即成功运行
[PC端]
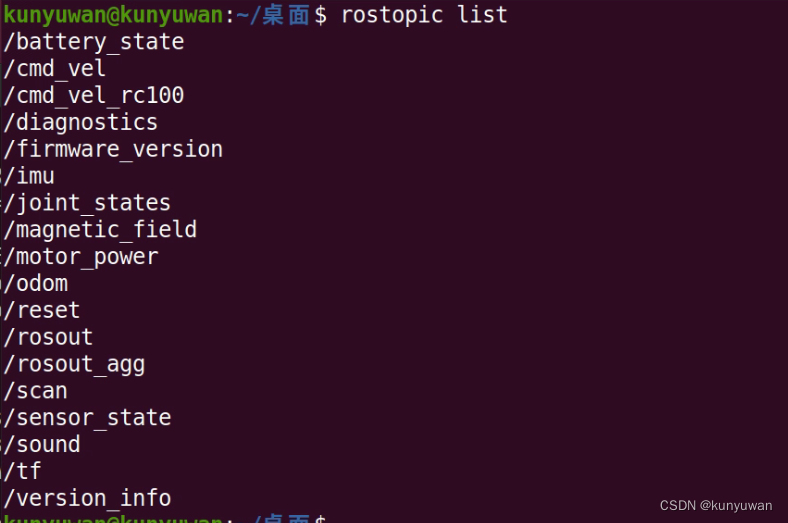
PC端可以通过rostopic list来查看订阅的话题
rostopic list
1.3.3 PC端控制机器人进行运动
[PC端]
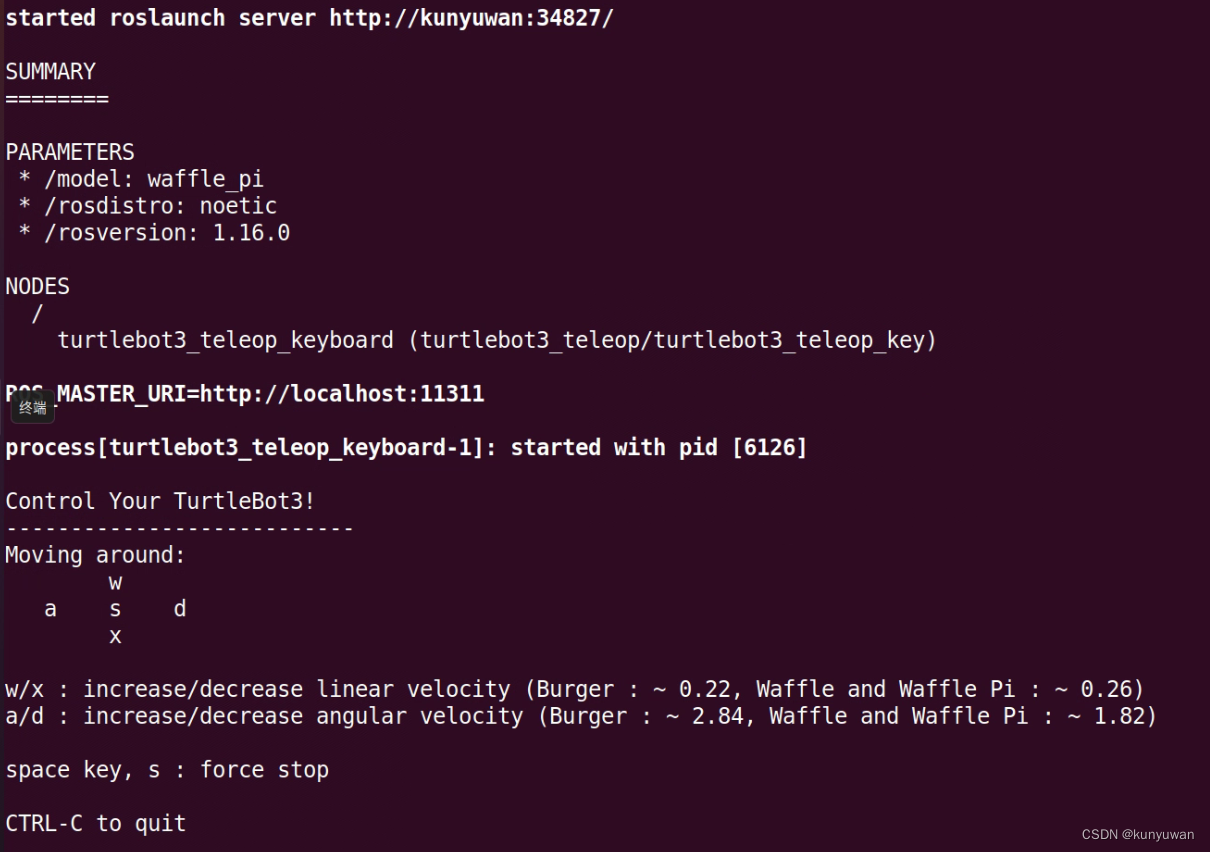
在PC端运行roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch来控制机器人的运动
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
通过wadx来控制机器人的前进后退,转向。通过s可以把机器人停下来。
相关文章:
Ubuntu20.04配置TurtleBot3 Waffle Pi远程控制
这里写目录标题 0. 机器人配置1. Ubuntu20.04配置TurtleBot3 Waffle Pi远程控制1.1 TurtleBot3 Waffle Pi端配置1.2 PC端配置1.2.1 安装turtlebot3的环境配置1.2.2 创建项目并安装Turtlebot31.2.3 配置环境变量 1.3 PC端与TurtleBot3进行通信1.3.1 PC端与机器人端互PING和SSH连…...

SaaS产品和独立部署型产品有什么区别,该怎么选择?
随着云计算和软件服务的多样化,产品形式主要划分SaaS型(开通即用)和独立部署(完整交付)两种模式,那么SaaS产品和独立部署产品有哪些区别,我们在选择产品的时候应该如何去抉择?本文我…...
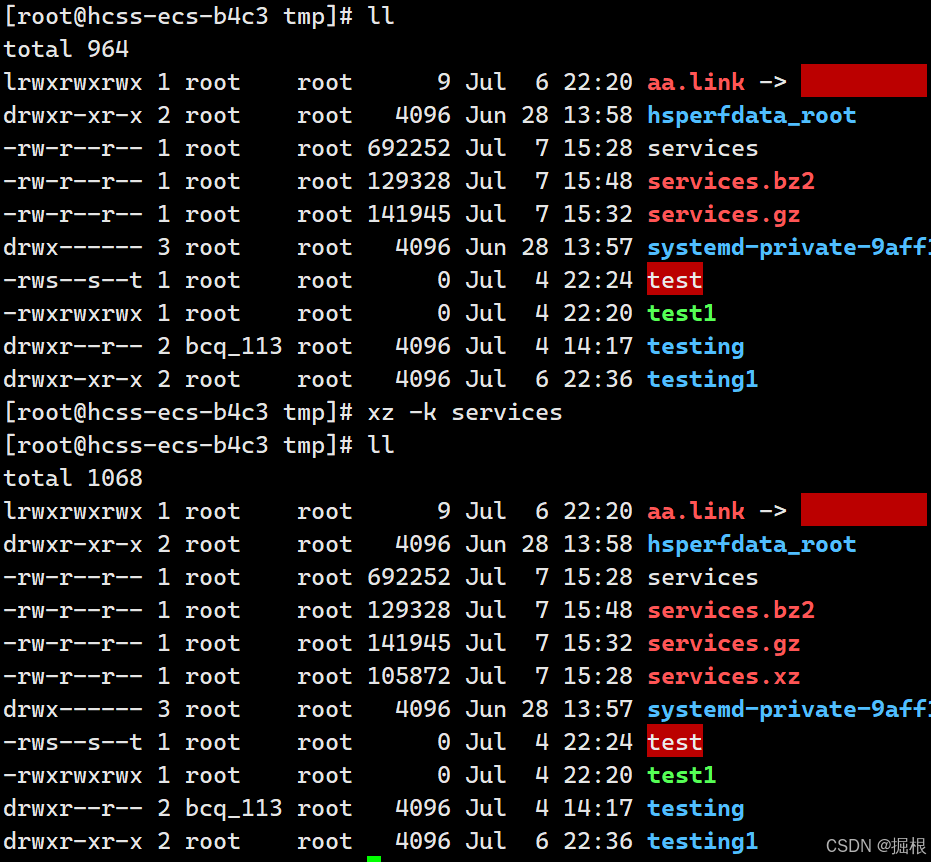
【Linux】压缩命令——gzip,bzip2,xz
1.压缩文件的用途与技术 你是否有过文件太大,导致无法以正常的E-mail方式发送?又或学校、厂商要求使用CD或DVD来做数据归档之用,但是你的单一文件却都比这些传统的一次性存储媒介还要大,那怎么分成多块来刻录?还有&am…...

【Java13】包
“包”这个机制,类似于分组。主要作用是区分不同组内的同名类。例如,高三三班有一个“王五”,高二八班也有一个“王五”。高三三班和高三八班就是两个不同的包。 Java中的包(package)机制主要提供了类的多层命名空间&…...

从零到一:Python自动化测试的详细指南!
引言: Python是一种功能强大且易于学习和使用的编程语言,它非常适合用于自动化测试。本文将从零开始,通过详细的步骤和规范,介绍如何在Python中实施高质量的自动化测试。我们将探讨测试策略的制定、测试框架的选择、测试用例的编…...

iOS中多个tableView 嵌套滚动特性探索
嵌套滚动的机制 目前的结构是这样的,整个页面是一个大的tableView, Cell 是整个页面的大小,cell 中嵌套了一个tableView 通过测试我们发现滚动的时候,系统的机制是这样的, 我们滑动内部小的tableView, 开始滑动的时候,…...

TCP/IP模型和OSI模型的区别
OSI模型, 是国际标准化组织(ISO)制定的一个用于计算机或通信系统间互联的标准体系,将计算机网络通信划分为七个不同的层级,每个层级都负责特定的功能。每个层级都构建在其下方的层级之上,并为上方的层级提供…...
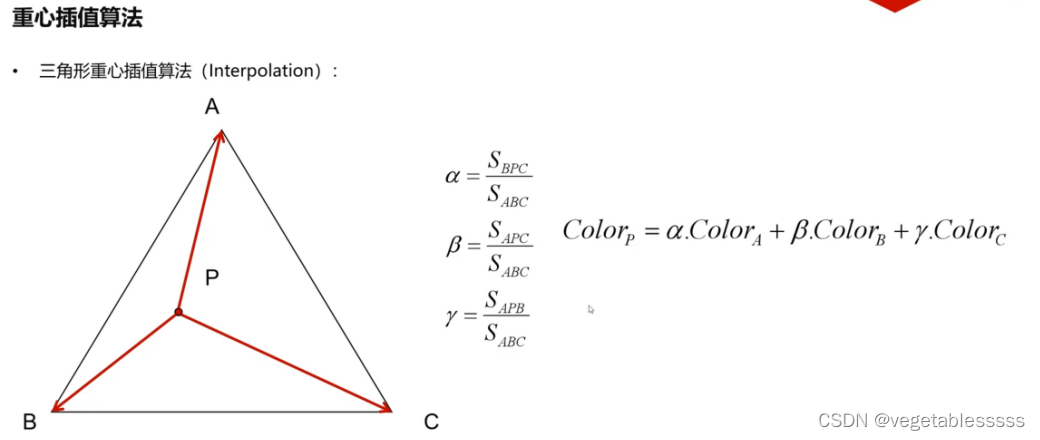
(九)绘制彩色三角形
前面的学习中并未涉及到颜色,现在打算写一个例子,在顶点着色器和片元着色器中加入颜色,绘制有颜色的三角形。 #include <glad/glad.h>//glad必须在glfw头文件之前包含 #include <GLFW/glfw3.h> #include <iostream>void …...

短信群发平台适用于哪些行业?
短信群发平台作为一种高效、快速且成本相对较低的通信方式,适用于多个行业。以下是一些主要适用行业的概述: 1. 零售与电商行业 应用场景:零售和电商企业可以利用短信群发进行新品推广、促销信息发布、订单状态更新、物流跟踪通知等。 2. 金…...

1. 倍数
倍数 题目描述 本题为填空题,只需要算出结果后,在代码中使用输出语句将所填结果输出即可。 请问在 11 到 20202020 中,有多少个数既是 44 的整数倍,又是 66 的整数倍。 运行限制 最大运行时间:1s最大运行内存: 12…...

C#常用关键字举例
关键字是 C# 编译器预定义的保留字。这些关键字不能用作标识符,但是,如果您想使用这些关键字作为标识符,可以在关键字前面加上 字符作为前缀。 class: public class MyClass {// Class definition }interface: public interface IMyInterfac…...

stm32——外部中断EXTI
上回书说到定时器的级联,今天来谈谈外部中断EXTI。我使用的是STM32F103C8T6的学习板。仅供大家参考。 什么是中断呢?中断是指计算机在执行程序的过程中,当出现某些异常情况或特殊事件(例如外部设备请求、定时时间到达、程序错误等…...

Solidity:变量数据存储和作用域 storage/memory/calldata
Solidity中的引用类型 引用类型(Reference Type):包括数组(array)和结构体(struct),由于这类变量比较复杂,占用存储空间大,我们在使用时必须要声明数据存储的位置。 数据位置 …...

ElementUI中的el-table解决宽度问题 - 根据内容自动撑开
在使用element-ui中,会发现表格组件el-table在未指定宽度情况下,会自动计算并给表格宽度赋值。但实际开发中,有时需要根据内容实际长度自动撑开显示,由内容的多少而决定表格的宽度,而不是默认宽度为100%。在默认情况下…...

react apollo hooks
1、创建ApolloProvider来包装整个程序 <ApolloProvider client{client}><App /> <ApolloProvider> 2、useQuery查询 工作方式usequery将返回一个数组 const {要返回的对象} useQuery(传入参数) 实例 const query gqlquery name {whatever {field}} e…...

Android 10.0 SystemUI启动流程
1、手机开机后,Android系统首先会创建一个Zygote(核心进程)。 2、由Zygote启动SystemServer。 3、SystemServer会启动系统运行所需的众多核心服务和普通服务、以及一些应用及数据。例如:SystemUI 启动就是从 SystemServer 里启动的…...

洛谷 P1032 [NOIP2002 提高组] 字串变换
P1032 [NOIP2002 提高组] 字串变换 - 洛谷 | 计算机科学教育新生态 题目来源 洛谷 题目内容 [NOIP2002 提高组] 字串变换 题目背景 本题不保证存在靠谱的多项式复杂度的做法。测试数据非常的水,各种做法都可以通过,不代表算法正确。因此本题题目和…...
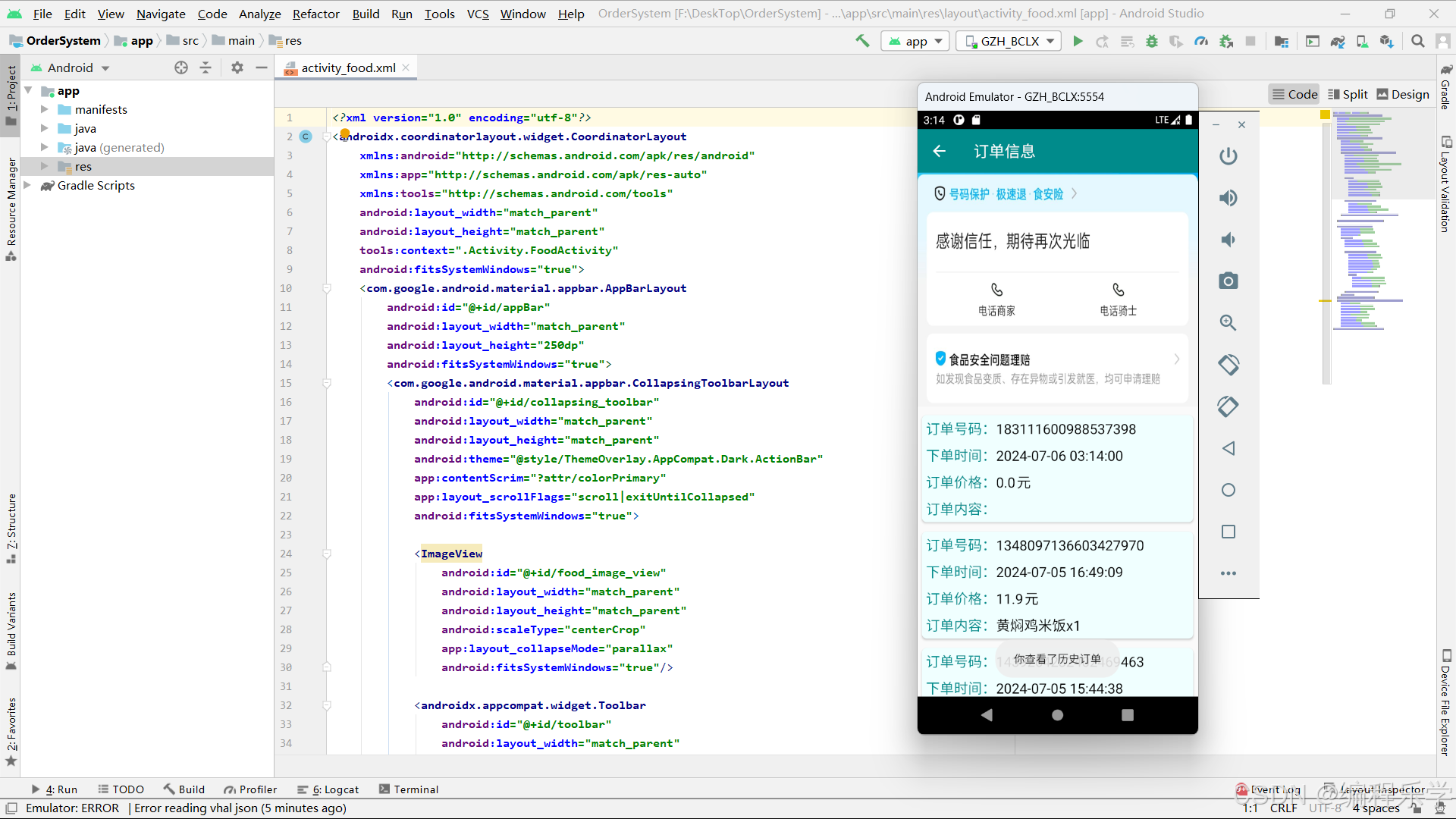
网络资源模板--Android Studio 外卖点餐App
目录 一、项目演示 二、项目测试环境 三、项目详情 四、完整的项目源码 原创外卖点餐:基于Android studio 实现外卖(点)订餐系统 非原创奶茶点餐:网络资源模板--基于 Android Studio 实现的奶茶点餐App报告 一、项目演示 网络资源模板--基于Android …...

【Linux】网络新手村
欢迎来到 破晓的历程的 博客 ⛺️不负时光,不负己✈️ 引言 今天,我们就开始学习Linux网络相关的内容。这篇博客作为Linux网络板块的第一篇博客看,我们首先要带着大家明白Linux网络的一些名词的概念,为之后的学习扫清障碍。然后我…...

123123
123123...

无机布防火卷帘门报价透明,包工包料,一次说清所有费用
很多客户在选购无机布防火卷帘门时,最关心实际成交价格,也担心报价不清晰,后期产生各类额外支出。行业内产品定价参差不齐,选材做工不同,最终价位自然存在差距,挑选时不能只看表面低价。 👉 点击…...

Android 11开发避坑:为什么你的App获取的Wifi MAC地址总是变?手把手教你配置固定MAC
Android 11开发实战:彻底解决Wifi MAC地址随机化问题最近在开发一个设备管理系统时,遇到了一个棘手的问题:我们的App在Android 11设备上获取的Wifi MAC地址每次都不一样,导致基于MAC地址的设备识别功能完全失效。经过一周的深入研…...

告别拍脑袋规划!用ArcGIS做绿道选线:如何科学量化坡度、水域、道路成本并加权计算
科学规划绿道的ArcGIS高阶技法:从成本栅格构建到最优路径生成绿道规划从来不是简单的"两点之间直线最短",而是需要综合考虑地形、生态、人文等多维因素的复杂决策过程。传统规划中常见的"拍脑袋"决策方式,往往导致建成后…...

BetterJoy完整配置指南:5分钟让Switch手柄在PC上完美运行
BetterJoy完整配置指南:5分钟让Switch手柄在PC上完美运行 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitcode.c…...

Windows文件夹共享
目标:同一局域网实现在一台计算机上共享文件夹,在另一台电脑访问一、电脑A 1.点击要共享的文件夹 -> 属性 -> 共享2.添加Everyone用户组3.控制面板中网络共享关闭密码保存,在访问时不用输入账号密码。二、电脑B 1.在文件资源管理器路径…...

CPU架构启发的智能仓储布局优化实践
1. 仓库布局优化的核心挑战与创新机遇在物流仓储领域,拣货环节通常占据运营成本的55%-65%,而其中约50%的时间消耗在无效行走路径上。传统矩形仓库布局虽然易于规划和施工,但其正交的通道设计导致拣货员需要频繁进行90度转向,这种&…...

PCB的常规机械通孔与HDI工艺钻孔差异
结合常规 4 层通孔 PCB(非 HDI) 标准制程,分步骤讲清钻孔时机、先后顺序,区分机械通孔与板件结构,专业且贴合工厂实际流程。一、先明确 4 层通孔板基础结构4 层板结构:L1 → PP 半固化片 → L2/L3ÿ…...

OpenIPC开源固件:5分钟解锁网络摄像头的终极控制权
OpenIPC开源固件:5分钟解锁网络摄像头的终极控制权 【免费下载链接】firmware Alternative IP Camera firmware from an open community 项目地址: https://gitcode.com/gh_mirrors/fir/firmware 还在为网络摄像头的封闭系统而烦恼吗?想要完全掌控…...

如何快速解锁中兴光猫权限:zteOnu工具完整使用指南
如何快速解锁中兴光猫权限:zteOnu工具完整使用指南 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 中兴光猫作为家庭网络的核心设备,其强大的硬件性能常常被默认…...

告别枯燥理论!用Unity脚本生命周期与预制体玩转一个“会变身的敌人”
用Unity打造会变身的敌人:脚本生命周期与预制体的实战应用在游戏开发中,敌人AI的行为设计往往是新手开发者最感兴趣也最容易感到困惑的部分。Unity的脚本生命周期和预制体系统为这类需求提供了强大支持,但教科书式的讲解常常让学习者陷入枯燥…...