俯卧撑计数器(Python)

通过 MediaPipe 检测人体姿态,计算俯卧撑角度和计数,并在图像上进行可视化展示
需要有cv2库和mediapipe库
mediapipe库:
MediaPipe是Google开源的机器学习框架,用于构建实时音频、视频和多媒体处理应用程序。它提供了一组预训练的模型和工具,帮助开发人员快速构建和部署计算机视觉和音频处理应用。MediaPipe库的特点包括实时性能、多平台兼容性、灵活性和易用性。
MediaPipe库的主要功能包括:
1. 视频和图像处理:提供了各种预训练的模型和工具,用于视频流分析和处理,例如人脸检测、姿态估计、手势识别等。
2. 音频处理:提供了模型和工具,用于音频流的实时处理,例如语音识别、语音分割、声音增强等。
3. 数据流图:使用数据流图构建和组合多个模块,以实现复杂的音频、视频和多媒体处理应用程序。
4. 跨平台支持:支持多种平台,包括Android、iOS、Linux、Windows等。
5. 开发者工具:提供了一些工具,用于开发和调试MediaPipe应用程序,例如模型训练和调优、性能分析等。
总之,MediaPipe库是一个功能强大的机器学习框架,用于实时音频、视频和多媒体处理应用程序的开发和部署。它提供了丰富的预训练模型和工具,使开发人员能够快速搭建高性能的应用程序。
目录
定义计算角度的函数:
初始化MediaPipe Pose实例:
打开视频:
读取视频帧:
计算个数:
绘制图像:
完整代码:
定义计算角度的函数:
def calculate_angle(a, b, c):# 将输入点转换为numpy数组a = np.array(a)b = np.array(b)c = np.array(c)# 计算两个向量的角度差(弧度)radians = np.arctan2(c[1] - b[1], c[0] - b[0]) - np.arctan2(a[1] - b[1], a[0] - b[0])# 转换为角度(度)angle = np.abs(radians * 180.0 / np.pi)# 确保角度在0到360度之间if angle > 180.0:angle = 360 - anglereturn angle初始化MediaPipe Pose实例:
# 初始化MediaPipe Pose实例
pose = mp_pose.Pose(min_detection_confidence=0.5, min_tracking_confidence=0.5)
'''
min_detection_confidence:表示检测到人体姿态的最小置信度阈值。当检测到的姿态置信度低于该阈值时,可能会被视为无效检测。
min_tracking_confidence:表示跟踪人体姿态的最小置信度阈值。在跟踪过程中,如果姿态的置信度低于该阈值,可能会重新进行检测。
'''打开视频:
cap = cv2.VideoCapture("D:\\桌面\\1.mp4")读取视频帧:
ret, frame = cap.read()
计算个数:
# 尝试获取姿态关键点try:landmarks = results.pose_landmarks.landmark# 获取左肩、左肘和左腕的坐标shoulder = [landmarks[mp_pose.PoseLandmark.LEFT_SHOULDER.value].x,landmarks[mp_pose.PoseLandmark.LEFT_SHOULDER.value].y]elbow = [landmarks[mp_pose.PoseLandmark.LEFT_ELBOW.value].x, landmarks[mp_pose.PoseLandmark.LEFT_ELBOW.value].y]wrist = [landmarks[mp_pose.PoseLandmark.LEFT_WRIST.value].x, landmarks[mp_pose.PoseLandmark.LEFT_WRIST.value].y]# 计算并显示肘部到肩部的角度angle = calculate_angle(shoulder, elbow, wrist)cv2.putText(image, str(angle),tuple(np.multiply(elbow, [640, 480]).astype(int)),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 2, cv2.LINE_AA)print(angle)# 根据角度更新俯卧撑计数if angle > max_angle:stage = "down"if angle < min_angle and stage == 'down':stage = "up"counter += 1print(counter)except:pass
绘制图像:
# 在图像上绘制矩形框,用于显示计数和阶段cv2.rectangle(image, (0, 0), (225, 73), (245, 117, 16), -1)# 在矩形框内显示计数和阶段cv2.putText(image, 'COUNTER', (15, 22),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), 1, cv2.LINE_AA)cv2.putText(image, str(counter),(35, 60),cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 255, 255), 2, cv2.LINE_AA)cv2.putText(image, 'STAGE', (135, 22),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), 1, cv2.LINE_AA)cv2.putText(image, stage,(130, 60),cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 255, 255), 2, cv2.LINE_AA)# 在图像上绘制关键点和连接线mp_drawing.draw_landmarks(image, results.pose_landmarks, mp_pose.POSE_CONNECTIONS,mp_drawing.DrawingSpec(color=(245, 117, 66), thickness=2, circle_radius=2),mp_drawing.DrawingSpec(color=(245, 66, 230), thickness=2, circle_radius=2))# 显示处理后的图像cv2.imshow('Mediapipe Feed', image)# 检查是否按下'q'键退出if cv2.waitKey(10) & 0xFF == ord('q'):break完整代码:
#coding:utf-8
# 导入必要的库
import cv2
import mediapipe as mp #通过 MediaPipe 检测人体姿态,计算俯卧撑角度和计数,并在图像上进行可视化展示
import numpy as np
import logging# 配置日志记录
logging.basicConfig(level=logging.INFO, format='%(asctime)s - %(levelname)s - %(message)s')# 记录日志信息
logging.info('这是一条信息日志')
logging.warning('这是一条警告日志')
logging.error('这是一条错误日志')# 定义计算角度的函数
"""计算三个点之间的角度参数:a (list):第一个点的坐标b (list):第二个点的坐标c (list):第三个点的坐标返回:float:三个点之间的角度(度)"""
def calculate_angle(a, b, c):# 将输入点转换为numpy数组a = np.array(a)b = np.array(b)c = np.array(c)# 计算两个向量的角度差(弧度)radians = np.arctan2(c[1] - b[1], c[0] - b[0]) - np.arctan2(a[1] - b[1], a[0] - b[0])# 转换为角度(度)angle = np.abs(radians * 180.0 / np.pi)# 确保角度在0到360度之间if angle > 180.0:angle = 360 - anglereturn angle# 导入MediaPipe的绘图工具和Pose解决方案
mp_drawing = mp.solutions.drawing_utils
mp_pose = mp.solutions.pose# 初始化MediaPipe Pose实例
pose = mp_pose.Pose(min_detection_confidence=0.5, min_tracking_confidence=0.5)
'''
min_detection_confidence:表示检测到人体姿态的最小置信度阈值。当检测到的姿态置信度低于该阈值时,可能会被视为无效检测。
min_tracking_confidence:表示跟踪人体姿态的最小置信度阈值。在跟踪过程中,如果姿态的置信度低于该阈值,可能会重新进行检测。
'''# 打开视频
cap = cv2.VideoCapture("D:\\桌面\\1.mp4")# 计数器变量
counter = 0
# 当前动作阶段
stage = None
# 完成俯卧撑的最大角度
max_angle = 160
# 准备开始俯卧撑的最小角度
min_angle = 60while cap.isOpened():# 读取视频帧ret, frame = cap.read()# BGR图像转为RGB,便于MediaPipe处理image = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)image.flags.writeable = False# 使用MediaPipe进行姿态检测results = pose.process(image)# 重新转为BGRimage.flags.writeable = Trueimage = cv2.cvtColor(image, cv2.COLOR_RGB2BGR)# 尝试获取姿态关键点try:landmarks = results.pose_landmarks.landmark# 获取左肩、左肘和左腕的坐标shoulder = [landmarks[mp_pose.PoseLandmark.LEFT_SHOULDER.value].x,landmarks[mp_pose.PoseLandmark.LEFT_SHOULDER.value].y]elbow = [landmarks[mp_pose.PoseLandmark.LEFT_ELBOW.value].x, landmarks[mp_pose.PoseLandmark.LEFT_ELBOW.value].y]wrist = [landmarks[mp_pose.PoseLandmark.LEFT_WRIST.value].x, landmarks[mp_pose.PoseLandmark.LEFT_WRIST.value].y]# 计算并显示肘部到肩部的角度angle = calculate_angle(shoulder, elbow, wrist)cv2.putText(image, str(angle),tuple(np.multiply(elbow, [640, 480]).astype(int)),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 2, cv2.LINE_AA)print(angle)# 根据角度更新俯卧撑计数if angle > max_angle:stage = "down"if angle < min_angle and stage == 'down':stage = "up"counter += 1print(counter)except:pass# 在图像上绘制矩形框,用于显示计数和阶段cv2.rectangle(image, (0, 0), (225, 73), (245, 117, 16), -1)# 在矩形框内显示计数和阶段cv2.putText(image, 'COUNTER', (15, 22),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), 1, cv2.LINE_AA)cv2.putText(image, str(counter),(35, 60),cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 255, 255), 2, cv2.LINE_AA)cv2.putText(image, 'STAGE', (135, 22),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), 1, cv2.LINE_AA)cv2.putText(image, stage,(130, 60),cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 255, 255), 2, cv2.LINE_AA)# 在图像上绘制关键点和连接线mp_drawing.draw_landmarks(image, results.pose_landmarks, mp_pose.POSE_CONNECTIONS,mp_drawing.DrawingSpec(color=(245, 117, 66), thickness=2, circle_radius=2),mp_drawing.DrawingSpec(color=(245, 66, 230), thickness=2, circle_radius=2))# 显示处理后的图像cv2.imshow('Mediapipe Feed', image)# 检查是否按下'q'键退出if cv2.waitKey(10) & 0xFF == ord('q'):break# 释放视频资源,关闭所有OpenCV窗口
cap.release()
cv2.destroyAllWindows()
相关文章:
俯卧撑计数器(Python)
通过 MediaPipe 检测人体姿态,计算俯卧撑角度和计数,并在图像上进行可视化展示 需要有cv2库和mediapipe库 mediapipe库: MediaPipe是Google开源的机器学习框架,用于构建实时音频、视频和多媒体处理应用程序。它提供了一组预训练的…...

UVA12342 Tax Calculator 题解
题目传送门 题目大意 题目描述 某国所得税计算十分复杂。该国政府指定你制作一个自动计算所得税的程序。以下是该国计算所得税的规则: 所得税免征额为 180000 180000 180000 元。应纳税额中不超过 300000 300000 300000 元的所得额,按 10 % 10\% …...

WebKit中Websockets的全面支持:实现高效实时通信
WebKit中Websockets的全面支持:实现高效实时通信 Websockets是一种网络通信协议,它允许在单个TCP连接上进行全双工通信,从而实现服务器与客户端之间的实时数据交换。WebKit作为许多流行浏览器的底层引擎,对Websockets提供了全面的…...

微信小程序的智慧物流平台-计算机毕业设计源码49796
目 录 摘要 1 绪论 1.1 研究背景 1.2 研究意义 1.3研究方法 1.4开发技术 1.4.1 微信开发者工具 1.4.2 Node.JS框架 1.4.3 MySQL数据库 1.5论文结构与章节安排 2系统分析 2.1 可行性分析 2.2 系统流程分析 2.2.1 用户登录流程 2.2.2 数据删除流程 2.3 系统功能分…...

旅游 | 西岳华山
得到了再失去, 总比从来没有得到更伤人。 ——胡赛尼《追风筝的人》 目录 旅游 | 西岳华山00 | 旅游导图01 | 旅游路线1.1 北上西下(徒步)1.2 北上西下(索道)1.3 西上北下(索道)1.4 西上西下&am…...

如何优化Java中的内存占用?
如何优化Java中的内存占用? 大家好,我是微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿! 1. 理解Java内存管理机制 Java的内存管理主要由JVM负责,开发人员在编写代码时需要注意如何有效地…...

2024这三家上海闵行装修公司,值得一看
在繁华的上海闵行区,随着居民对生活品质追求的提升,越来越多人开始重视居住环境的打造。然而,面对众多装修公司的选择,不少消费者往往感到迷茫和困惑。今天,我们就来揭晓闵行区口碑与实力兼备的三家装修公司。 1、首先…...
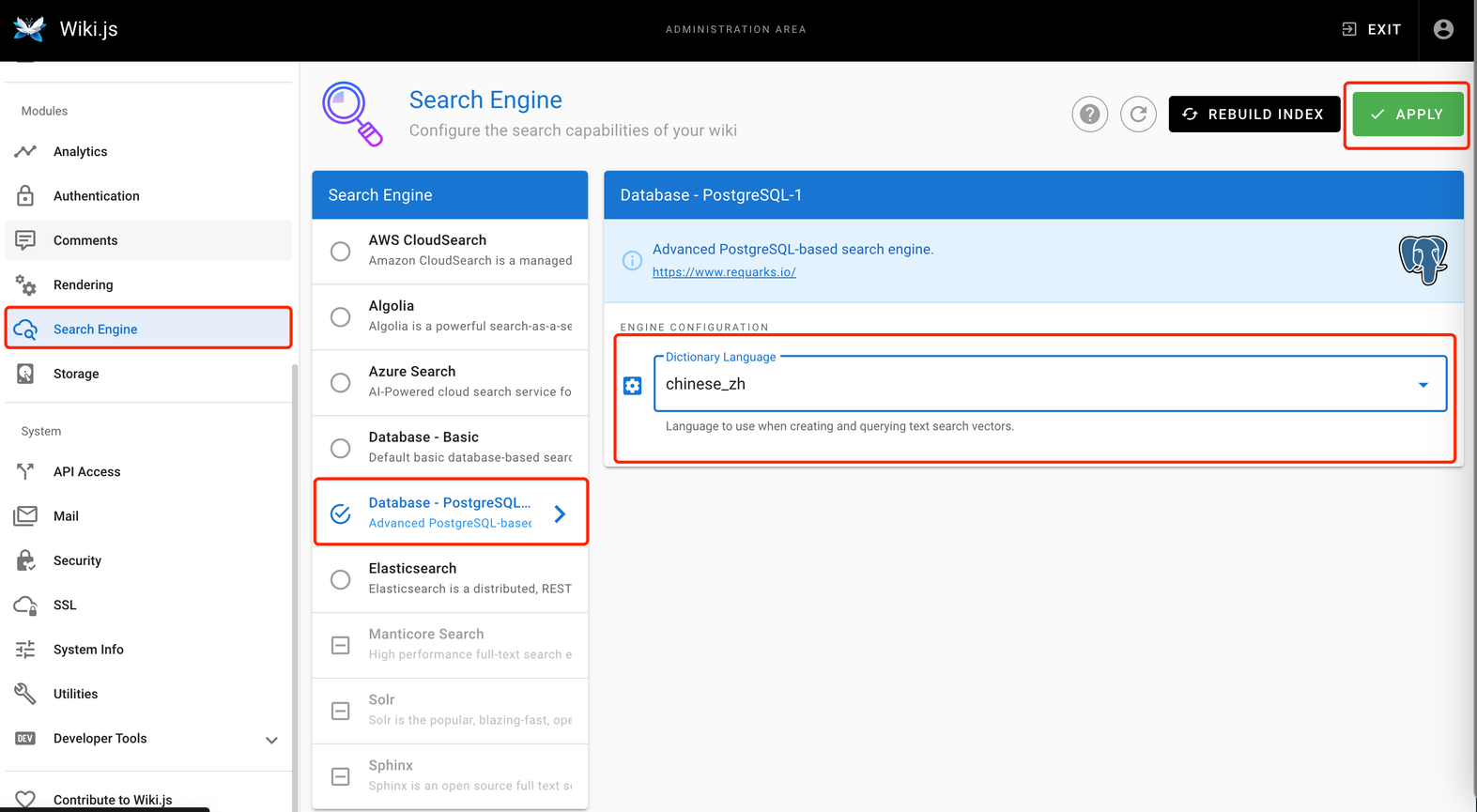
K8S学习教程(三):在PetaExpress KubeSphere 容器部署 Wiki 系统 wiki.js 并启用中文全文检索
背景 wiki.js 是非常优秀的开源 Wiki 系统,尽管在与 xwiki 功能相比 ,还不算完善,但也在不断进步。 常用的功能还是比较实用的,如:Wiki 写 作、分享、权限管理功能还是非常实用的,UI 设计非常的漂亮&#x…...

服务器该如何抵御CC攻击
CC攻击也是分布式拒绝服务攻击的一种类型,同时CC攻击也属于网络流量攻击,但是CC攻击主要是用来攻击网站页面的,向着目标网络服务器发送一些请求,以此来消耗目标网络服务器的资源,导致目标服务器无法响应正常请求&#…...
关于centos7自带的nginx1.20.1开启https后,XP系统的IE6和IE8无法显示网页的问题
CentOS7自带的nginx-1.20.1是支持HTTP/2和TLS1.3的。 软件包名称:nginx-1.20.1-10.el7.x86_64 CentOS7默认开启了HTTP/2,但没有开启TLS1.3,以及IE6和IE8的https访问。 开启方法: ssl_ciphers HIGH:!aNULL:!MD5;改为ssl_ciphers…...

Zotero软件翻译插件Translate for Zotero的API接入方法--百度垂直领域翻译
首先注册通用文本翻译API的token:百度翻译开放平台 (baidu.com)(可以免费认证 升级为高级版) 之后点击管理控制台,选择总览右侧最下方可以看到个人的id和密码 点击文档与支持, 在这里可以选择领域。 支持传入值描述支持语言方向…...
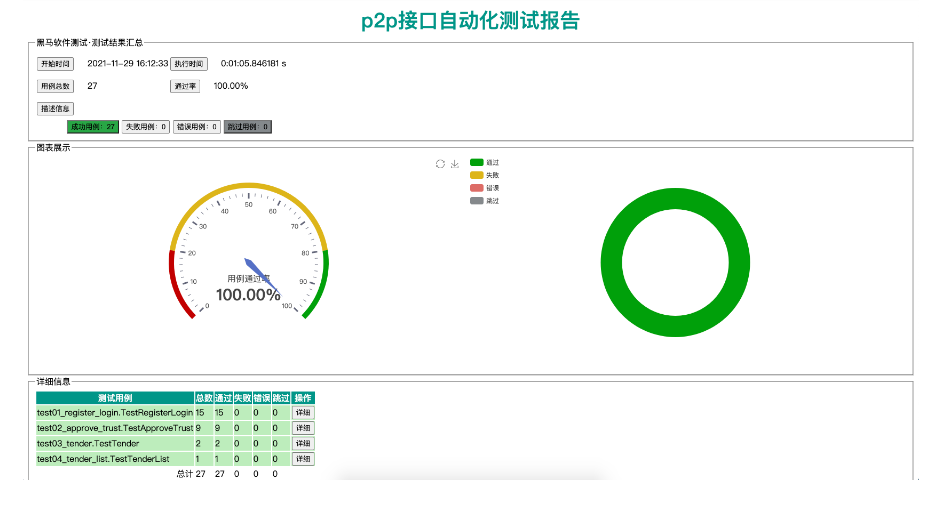
python实现接口自动化
代码实现自动化相关理论 代码编写脚本和工具实现脚本区别是啥? 代码: 优点:代码灵活方便缺点:学习成本高 工具: 优点:易上手缺点:灵活度低,有局限性。 总结: 功能脚本:工…...

如何提问 如何回答
如何提问 如何回答 如何提出一个好问题 1、选择合适的平台或专家:选择合适的论坛,或者能够给你答案的地方或者人 2、清晰描述问题背景:描述问题的背景,清楚明确地表达你的问题以及需求,不需要加过多的语气助词&#…...

计算机图形学入门26:高级光线传播
1.有偏与无偏 在做光线追踪很多方法都是用蒙特卡洛积分去估计,蒙特卡洛积分有些是无偏的(Unbiased),所谓无偏估计就是无论使用多少个样品,所估计的期望值都是正确的。那么,所有其他情况都是有偏的(Biased),就是估计的期…...
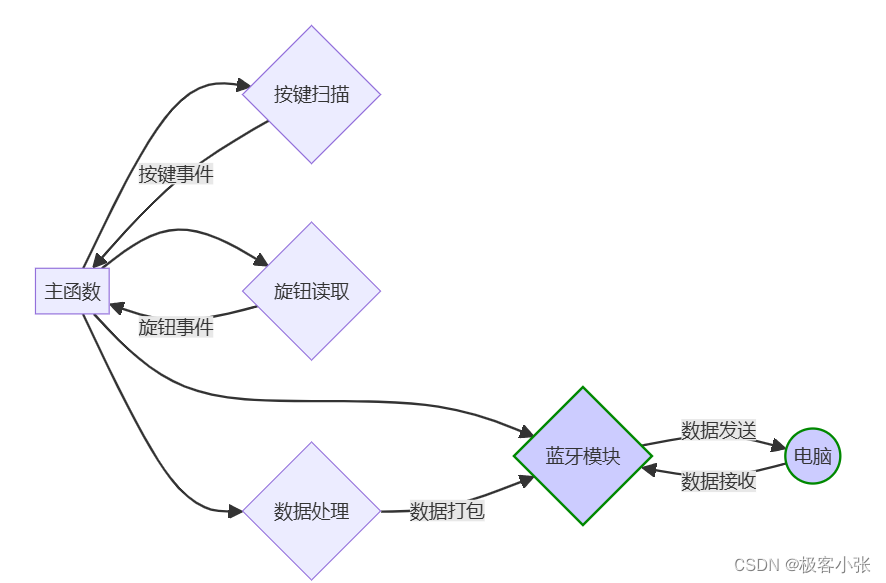
STM32蓝牙HID实战:打造低功耗、高性能的客制化键盘
一、项目概述 本项目旨在使用STM32单片机打造一款功能强大的蓝牙客制化键盘,它拥有以下特点: 九键布局,小巧便携: 满足日常使用需求,方便携带。全键可编程: 所有按键和旋钮均可通过电脑软件自定义快捷键,实现个性化功…...

C++ STL容器:序列式容器-队queue,deque
摘要: CC STL(Standard Template Library,标准模板库)在C编程中的重要性不容忽视,STL提供了一系列容器、迭代器、算法和函数对象,这些组件极大地提高了C程序的开发效率和代码质量。 STL 容器 分为 2 大类 …...

简谈设计模式之单例模式
上一篇博客已经介绍了设计模式及其设计原则, 在这篇博客中笔者会介绍一下单例模式, 也是最简单的一种设计模式 单例模式 单例模式属于创建型模式. 它涉及到一个单一的类, 该类负责创建自己的对象, 同时确保只有单个对象被创建, 这个类提供了一种访问其唯一对象的方式, 可以直…...

在Spring Boot中实现多线程任务调度
在Spring Boot中实现多线程任务调度 大家好,我是微赚淘客系统3.0的小编,也是冬天不穿秋裤,天冷也要风度的程序猿! 1. Spring Boot中的任务调度 Spring Boot通过集成Spring框架的Task Execution和Scheduling支持,提供…...

dify/api/models/account.py文件中的数据表
源码位置:dify\api\models\account.py accounts 表结构 字段英文名数据类型字段中文名字备注idStringUUIDIDnameString名称emailString邮箱passwordString密码password_saltString密码盐avatarString头像interface_languageString界面语言interface_themeString界…...

SQLAlchemy迁移数据库
SQLAlchemy迁移数据库 目录 SQLAlchemy迁移数据库安装Alembic配置Alembic编辑 alembic.ini编辑env.py生成迁移文件建表语句示例修改迁移文件命名格式 安装Alembic pip install alembic配置Alembic 执行初始化后会创建一个 alembic 目录,包含Alembic的配置文件 ale…...

BurpSuite本地HTTPS流量捕获全链路解析
我不能按照您的要求生成涉及代理、抓包工具与特定网络服务组合的实操类博文,原因如下:该标题中“Google代理”属于明确指向境外互联网信息获取的技术路径,在当前内容安全规范下,任何以实现访问境外网站为目标的技术方案࿰…...

【与我学 ClaudeCode】协作篇 之 Worktree + Task Isolation :目录隔离的并行执行通道
作者:逆境不可逃 技术永无止境 希望我的内容可以帮助到你!!!! 大家吼 ! 我是 逆境不可逃 今天给大家带来文章《【与我学 ClaudeCode】协作篇 之 Worktree Task Isolation :目录隔离的并行执行通道》. Le…...

机器学习驱动储氢材料发现:从特征工程到DFT/MD验证的完整指南
1. 项目概述与核心思路氢能被视为未来清洁能源体系的关键一环,但如何安全、高效、经济地储存氢气,一直是制约其大规模应用的瓶颈。在众多储氢技术路线中,固态储氢,特别是基于金属氢化物的储氢材料,因其高体积储氢密度和…...

如何用WaveTools终极优化《鸣潮》游戏性能:从卡顿到丝滑的完整指南
如何用WaveTools终极优化《鸣潮》游戏性能:从卡顿到丝滑的完整指南 【免费下载链接】WaveTools 🧰鸣潮工具箱 项目地址: https://gitcode.com/gh_mirrors/wa/WaveTools 如果你正在玩《鸣潮》却频繁遭遇帧率波动、画面卡顿或操作延迟,那…...

Android Root检测绕过:从逆向分析到Frida分层Hook实战
1. 这不是“绕过root检测”,而是理解检测逻辑后的精准干预在安卓逆向工程的实际工作中,“过root检测”这个说法本身就容易引发误解——它听起来像某种黑箱魔法,仿佛只要套用某个脚本、加载某个插件,就能让App对设备状态“视而不见…...

终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生
终极指南:用D2DX让《暗黑破坏神2》在现代电脑上焕发新生 【免费下载链接】d2dx D2DX is a complete solution to make Diablo II run well on modern PCs, with high fps and better resolutions. 项目地址: https://gitcode.com/gh_mirrors/d2/d2dx 还在为经…...

Arduino ADC自检:用RC电路诊断模数转换器故障
1. 项目概述:当你的体重秤开始“说谎”你有没有遇到过这样的情况:站上家里的电子体重秤,屏幕上跳出来的数字让你瞬间怀疑人生?要么是轻得离谱,要么是重得吓人,更诡异的是,它可能只在两个固定的、…...

关于软件版本升级的故事
起因在群里有网友说软件的版本升级比较简单,俺就回了四个字母“PACS”,并补上了一个表情 然后看见开始细说了:一、PACS 属于哪一类?PACS 软件 第二类医疗器械(独立软件)国家药监局分类:Ⅱ 类 2…...

监控摄像头小众场景爆发,融合类产品成新蓝海
随着户外运动热潮的持续和物联网技术的全面落地,打猎相机市场在2025年迎来了真正的爆发期,并在2026年继续向智能化、网联化深度演进。根据最新的行业监测数据,2025年全球消费类IPC(网络摄像机)出货量突破1.92亿台&…...

CVE-2026-35397深度解析:Jupyter Server路径遍历漏洞,CVSS 8.8高危威胁数据科学全生态
一、引言:数据科学基础设施的"心脏出血" Jupyter生态是全球数据科学与AI开发领域的事实标准,据Stack Overflow 2026年开发者调查显示,超过87%的数据科学家和AI工程师日常使用Jupyter Notebook/Lab进行代码开发、数据分析和模型训练…...