YOLOv10改进 | EIoU、SIoU、WIoU、DIoU、FocusIoU等二十余种损失函数
一、本文介绍
这篇文章介绍了YOLOv10的重大改进,特别是在损失函数方面的创新。它不仅包括了多种IoU损失函数的改进和变体,如SIoU、WIoU、GIoU、DIoU、EIOU、CIoU,还融合了“Focus”思想,创造了一系列新的损失函数。这些组合形式的损失函数超过了二十余种,每种都针对特定的目标检测挑战进行优化。文章会详细探讨这些损失函数如何提高YOLOv10在各种检测任务中的性能,包括提升精度、加快收敛速度和增强模型对复杂场景的适应性。本文章主要是为了发最近新出的Inner思想改进的各种EIoU的文章服务,其中我经过实验在绝大多数下的效果都要比本文中提到的各种损失效果要好。
专栏回顾:YOLOv10改进系列专栏——本专栏持续复习各种顶会内容——科研必备
本文代码地址: 文末提供完整代码块-包括EIoU、CIoU、DIoU等七种损失和其Focus变种
目录
一、本文介绍
二、各种损失函数的基本原理
2.1 交集面积和并集面积
2.2 IoU
2.3 SIoU
2.4 WioU
2.5 GIoU
2.6 DIoU
2.7 EIoU
2.8 CIoU
2.9 FocusLoss
三、EIoU、SIoU、EIoU、FocusIoU等损失函数代码块
3.1 代码一
3.2 代码二
四、添加EIoU、SIoU、EIoU、FocusIoU等损失函数到模型中
五、总结
二、各种损失函数的基本原理
2.1 交集面积和并集面积
在理解各种损失函数之前我们需要先来理解一下交集面积和并集面积,在数学中我们都学习过集合的概念,这里的交集和并集的概念和数学集合中的含义是一样的。

2.2 IoU
论文地址:IoU Loss for 2D/3D Object Detectio
适用场景:普通的IoU并没有特定的适用场景
概念: 测量预测边界框和真实边界框之间的重叠度(最基本的边界框损失函数,后面的都是居于其进行计算)。

2.3 SIoU
论文地址:SIoU: More Powerful Learning for Bounding Box Regression
适用场景:适用于需要高精度边界框对齐的场景,如精细的物体检测和小目标检测。
概念: SIoU损失通过融入角度考虑和规模敏感性,引入了一种更为复杂的边界框回归方法,解决了以往损失函数的局限性,SIoU损失函数包含四个组成部分:角度损失、距离损失、形状损失和第四个未指定的组成部分。通过整合这些方面,从而实现更好的训练速度和预测准确性。

2.4 WioU
论文地址:WIoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism
适用场景:适用于需要动态调整损失焦点的情况,如不均匀分布的目标或不同尺度的目标检测。
概念:引入动态聚焦机制的IoU变体,旨在改善边界框回归损失。
![]()
2.5 GIoU
论文地址:GIoU: A Metric and A Loss for Bounding Box Regression
适用场景:适合处理有重叠和非重叠区域的复杂场景,如拥挤场景的目标检测。
概念: 在IoU的基础上考虑非重叠区域,以更全面评估边界框

2.6 DIoU
论文地址:DIoU: Faster and Better Learning for Bounding Box Regression
适用场景:适用于需要快速收敛和精确定位的任务,特别是在边界框定位精度至关重要的场景。
概念:结合边界框中心点之间的距离和重叠区域。

2.7 EIoU
论文地址:EIoU:Loss for Accurate Bounding Box Regression
适用场景:可用于需要进一步优化边界框对齐和形状相似性的高级场景。
概念:EIoU损失函数的核心思想在于提高边界框回归的准确性和效率。它通过以下几个方面来优化目标检测:
1. 增加中心点距离损失:通过最小化预测框和真实框中心点之间的距离,提高边界框的定位准确性。
2. 考虑尺寸差异:通过惩罚宽度和高度的差异,EIoU确保预测框在形状上更接近真实框。
3. 结合最小封闭框尺寸:将损失函数与包含预测框和真实框的最小封闭框的尺寸相结合,从而使得损失更加敏感于对象的尺寸和位置。
EIoU损失函数在传统IoU基础上增加了这些考量,以期在各种尺度上都能获得更精确的目标定位,尤其是在物体大小和形状变化较大的场景中。

2.8 CIoU
论文地址:CIoU:Enhancing Geometric Factors in Model Learning
适用场景:适合需要综合考虑重叠区域、形状和中心点位置的场景,如复杂背景或多目标跟踪。
概念:综合考虑重叠区域、中心点距离和长宽比。

2.9 FocusLoss
论文地址:Focal Loss for Dense Object Detection
适用场景:适用于需要高精度边界框对齐的场景,如精细的物体检测和小目标检测。
Focal Loss由Kaiming He等人在论文《Focal Loss for Dense Object Detection》中提出,旨在解决在训练过程中正负样本数量极度不平衡的问题,尤其是在一些目标检测任务中,背景类别的样本可能远远多于前景类别的样本。
Focal Loss通过修改交叉熵损失,增加一个调整因子,这个因子降低了那些已经被正确分类的样本的损失值,使得模型的训练焦点更多地放在难以分类的样本上。这种方式特别有利于提升小目标或者在复杂背景中容易被忽视的目标的检测性能。简而言之,Focal Loss让模型“关注”(或“专注”)于学习那些对提高整体性能更为关键的样本。
三、EIoU、SIoU、EIoU、FocusIoU等损失函数代码块
3.1 代码一
此代码块块的基础版本来源于Github的开源版本,我在其基础上将Inner的思想加入其中形成了各种Inner的思想同时融合各种改良版本的损失函数形成对应版本的InnerIoU、InnerCIoU等损失函数。
import numpy as np
import torch, mathclass WIoU_Scale:''' monotonous: {None: origin v1True: monotonic FM v2False: non-monotonic FM v3}momentum: The momentum of running mean'''iou_mean = 1.monotonous = False_momentum = 1 - 0.5 ** (1 / 7000)_is_train = Truedef __init__(self, iou):self.iou = iouself._update(self)@classmethoddef _update(cls, self):if cls._is_train: cls.iou_mean = (1 - cls._momentum) * cls.iou_mean + \cls._momentum * self.iou.detach().mean().item()@classmethoddef _scaled_loss(cls, self, gamma=1.9, delta=3):if isinstance(self.monotonous, bool):if self.monotonous:return (self.iou.detach() / self.iou_mean).sqrt()else:beta = self.iou.detach() / self.iou_meanalpha = delta * torch.pow(gamma, beta - delta)return beta / alphareturn 1def bbox_iou(box1, box2, xywh=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, WIoU=False, Focal=False, alpha=1, gamma=0.5, scale=False, eps=1e-7):# Returns the IoU of box1 to box2. box1 is 4, box2 is nx4box2 = box2.T# Get the coordinates of bounding boxesif xywh: # x1, y1, x2, y2 = box1b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3]b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3]else: # transform from xywh to xyxyb1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2# Intersection areainter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \(torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0)# Union Areaw1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + epsw2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + epsunion = w1 * h1 + w2 * h2 - inter + epsif scale:self = WIoU_Scale(1 - (inter / union))# IoU# iou = inter / union # ori iouiou = torch.pow(inter/(union + eps), alpha) # alpha iouif CIoU or DIoU or GIoU or EIoU or SIoU or WIoU:cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) widthch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex heightif CIoU or DIoU or EIoU or SIoU or WIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squaredrho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2)with torch.no_grad():alpha_ciou = v / (v - iou + (1 + eps))if Focal:return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter/(union + eps), gamma) # Focal_CIoUelse:return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoUelif EIoU:rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2cw2 = torch.pow(cw ** 2 + eps, alpha)ch2 = torch.pow(ch ** 2 + eps, alpha)if Focal:return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter/(union + eps), gamma) # Focal_EIouelse:return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIouelif SIoU:# SIoU Loss https://arxiv.org/pdf/2205.12740.pdfs_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + epss_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + epssigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5)sin_alpha_1 = torch.abs(s_cw) / sigmasin_alpha_2 = torch.abs(s_ch) / sigmathreshold = pow(2, 0.5) / 2sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1)angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2)rho_x = (s_cw / cw) ** 2rho_y = (s_ch / ch) ** 2gamma = angle_cost - 2distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y)omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2)omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2)shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4)if Focal:return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_SIouelse:return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIouelif WIoU:if Focal:raise RuntimeError("WIoU do not support Focal.")elif scale:return getattr(WIoU_Scale, '_scaled_loss')(self), (1 - iou) * torch.exp((rho2 / c2)), iou # WIoU https://arxiv.org/abs/2301.10051else:return iou, torch.exp((rho2 / c2)) # WIoU v1if Focal:return iou - rho2 / c2, torch.pow(inter/(union + eps), gamma) # Focal_DIoUelse:return iou - rho2 / c2 # DIoUc_area = cw * ch + eps # convex areaif Focal:return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdfelse:return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdfif Focal:return iou, torch.pow(inter/(union + eps), gamma) # Focal_IoUelse:return iou # IoU3.2 代码二
代码块二此处是使用Focus时候需要修改的代码,如果不适用则不需要修改下面的代码,因为利用Focus机制时候返回的类型是元组所以需要额外的处理。
if type(iou) is tuple:if len(iou) == 2:# Focus Loss 时返回的是元组类型,进行额外处理loss_iou = ((1.0 - iou[0]) * iou[1].detach() * weight).sum() / target_scores_sumelse:loss_iou = (iou[0] * iou[1] * weight).sum() / target_scores_sumelse:# 正常的损失函数loss_iou = ((1.0 - iou) * weight).sum() / target_scores_sum四、添加EIoU、SIoU、EIoU、FocusIoU等损失函数到模型中
4.1 修改一
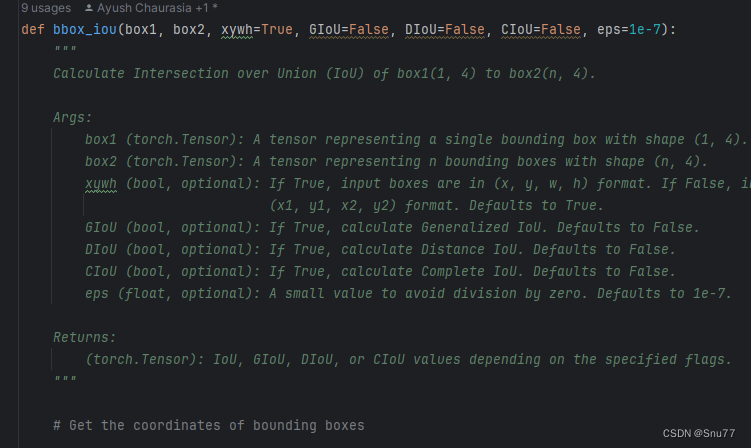
第一步我们需要找到如下的文件ultralytics/utils/metrics.py,找到如下的代码,下面的图片是原先的代码部分截图的正常样子,然后我们将整个代码块一将下面的整个方法(这里这是部分截图)内容全部替换
4.2 修改二
第二步我们找到另一个文件如下->"ultralytics/utils/loss.py",我们找到如下的代码块,将代码块二替换其中的第74行,
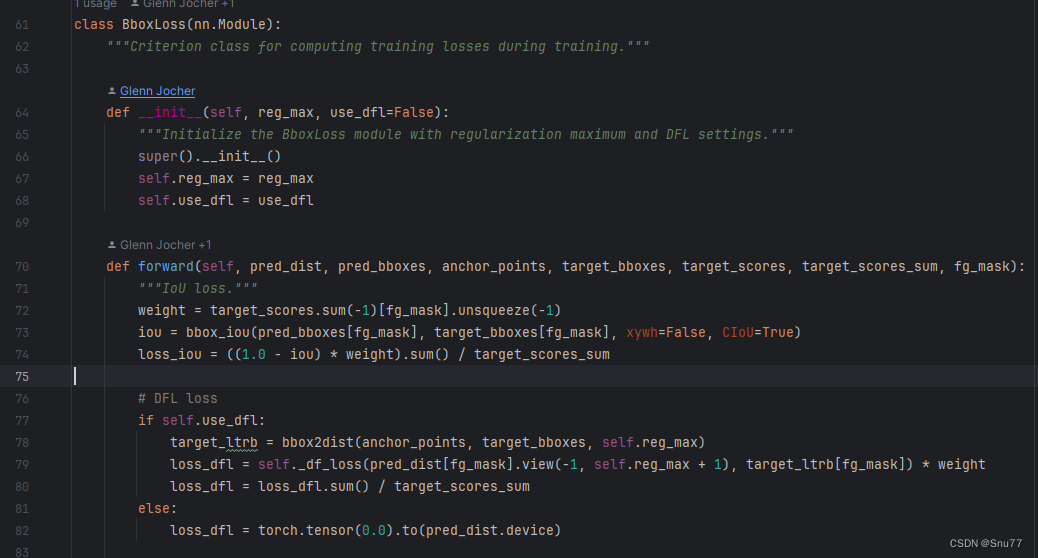
同时在上面的第73行(我说的我图片这里的不一定代表你那里,替换成如下的形式),按照下面代码设置即可!
# 想用那个对应的设置为True即可,比如我想用EIoU,那么我只需要把EIoU设置为True,那么此时就是EIoU!xywh=False, GIoU=False, DIoU=False, CIoU=True, EIoU=False, SIoU=False, WIoU=False, Focal=False, ratio=0.75)4.3 修改三
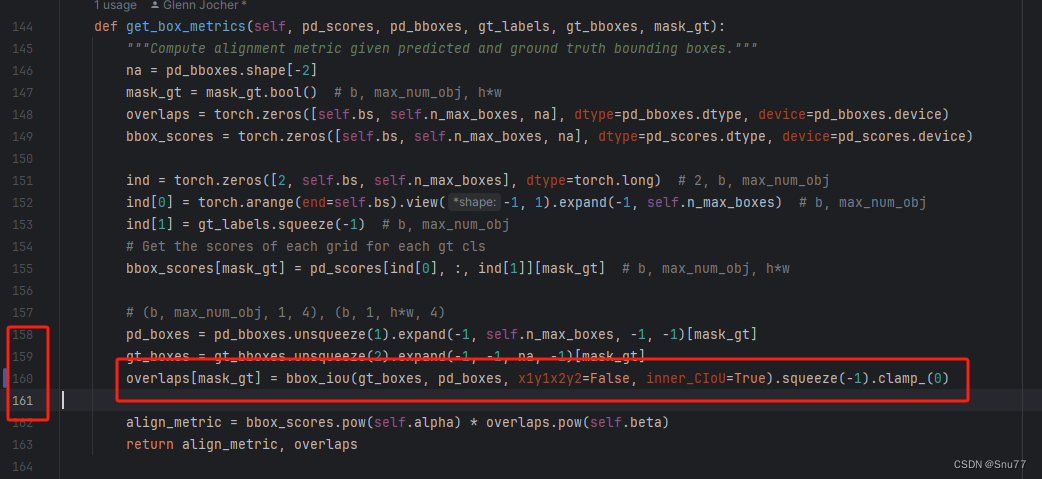
修改完上面的第二步,我们需要找到如下文件"ultralytics/utils/tal.py",在这个文件中我们找到如下的代码块,我这里已经修改完了,这里的使用保持和修改二一致!(这里不要开启Focus的如果步骤二开启这里也不要开启)
五、总结
到此本文的正式分享内容就结束了,在这里给大家推荐我的YOLOv10改进有效涨点专栏,本专栏目前为新开的平均质量分98分,后期我会根据各种最新的前沿顶会进行论文复现,也会对一些老的改进机制进行补充,目前本专栏免费阅读(暂时,大家尽早关注不迷路~),如果大家觉得本文帮助到你了,订阅本专栏,关注后续更多的更新~

相关文章:
YOLOv10改进 | EIoU、SIoU、WIoU、DIoU、FocusIoU等二十余种损失函数
一、本文介绍 这篇文章介绍了YOLOv10的重大改进,特别是在损失函数方面的创新。它不仅包括了多种IoU损失函数的改进和变体,如SIoU、WIoU、GIoU、DIoU、EIOU、CIoU,还融合了“Focus”思想,创造了一系列新的损失函数。这些组合形式的…...

docker nginx mysql redis
启动没有数据卷的nginx docker run -d -p 86:80 --name my-nginx nginx把/etc/nginx中的配置复制到宿主机 docker cp my-nginx:/etc/nginx /home/nginxlkl把/html 中的文件复制到宿主机 docker cp my-nginx:/etc/nginx /home/nginxlkl删除当前镜像 docker rm -f my-nginx重新起…...

Linux系统(CentOS)安装iptables防火墙
1,先检查是否安装了iptables 检查安装文件-执行命令:rpm -qa|grep iptables 检查安装文件-执行命令:service iptables status 2,如果安装了就卸装(iptables-1.4.21-35.el7.x86_64 是上面命令查出来的版本) 执行命令:…...

华为的服务器创新之路
华为作为全球领先的信息与通信技术解决方案供应商,其在服务器领域的创新方法不仅推动了企业自身的发展,也为整个行业的进步做出了重要贡献。以下是华为在服务器领域所采取的一些关键创新方法: 芯片级的自主创新 华为通过自主研发的“鲲鹏”处…...

对比service now和salesforce
目录 1. 核心功能和用途 2. 市场定位 3. 平台和扩展性 4. 用户界面和用户体验 5. 价格 总结 ServiceNow和Salesforce是两款广泛使用的企业软件平台,但它们的侧重点和用途有所不同。以下是对它们的详细比较: 1. 核心功能和用途 ServiceNow IT服务…...

树状数组
树状数组 树状数组的核心思想:分治。将数组以二叉树的形式进行维护区间之和。 设 a a a为原数组, t r e e tree tree为树状数组。 t r e e tree tree数组用于存储树上该结点下严格直连的子节点之和(例: t [ 1 ] a [ 1 ] , t [ 2 ] t [ 1 …...

【北京迅为】《i.MX8MM嵌入式Linux开发指南》-第一篇 嵌入式Linux入门篇-
i.MX8MM处理器采用了先进的14LPCFinFET工艺,提供更快的速度和更高的电源效率;四核Cortex-A53,单核Cortex-M4,多达五个内核 ,主频高达1.8GHz,2G DDR4内存、8G EMMC存储。千兆工业级以太网、MIPI-DSI、USB HOST、WIFI/BT…...

ansible常见问题配置好了密码还是报错
| FAILED! > { “msg”: “Using a SSH password instead of a key is not possible because Host Key checking is enabled and sshpass does not support this. Please add this host’s fingerprint to your known_hosts file to manage this host.” } 怎么解决…...
python-课程满意度计算(赛氪OJ)
[题目描述] 某个班主任对学生们学习的的课程做了一个满意度调查,一共在班级内抽取了 N 个同学,对本学期的 M 种课程进行满意度调查。他想知道,有多少门课是被所有调查到的同学都喜欢的。输入格式: 第一行输入两个整数 N , M 。 接…...

6、Redis系统-数据结构-05-整数
五、整数集合(Intset) 整数集合是 Redis 中 Set 对象的底层实现之一。当一个 Set 对象只包含整数值元素,并且元素数量不大时,就会使用整数集合这个数据结构作为底层实现。整数集合通过紧凑的内存布局和升级机制,实现了…...

STM32学习历程(day5)
EXTI外部中断 中断 中断就是在主程序运行过程中 出现了特定的中断触发条件(中断源),CPU会暂停当前的程序,去处理中断程序 处理完会返回被暂停的位置 继续运行原来的程序。 中断优先级 当有多个中断源同时申请中断时 CPU会根据…...

格蠹汇编阅读理解
一、调试工具使用方式 WinDbg常用命令: 执行 lm 命令,可以看到进程中有几个模块。执行~命令列一下线程。用!heap 命令列一下堆。执行!address 命令可以列出用户态空间中的所有区域。搜索吧!就从当前进程用户态空间的较低地址开始搜…...
的奥秘)
深入探索:scikit-learn中递归特征消除(RFE)的奥秘
深入探索:scikit-learn中递归特征消除(RFE)的奥秘 在机器学习的世界里,特征选择是一项至关重要的任务。它不仅能够提高模型的性能,还能减少模型的复杂度,避免过拟合。scikit-learn,作为Python中一个广泛使用的机器学习…...

240708_昇思学习打卡-Day20-MindNLP ChatGLM-6B StreamChat
240708_昇思学习打卡-Day20-MindNLP ChatGLM-6B StreamChat 基于MindNLP和ChatGLM-6B实现一个聊天应用,本文进行简单记录。 环境配置 %%capture captured_output # 实验环境已经预装了mindspore2.2.14,如需更换mindspore版本,可更改下面mi…...

lua入门(2) - 数据类型
前言 本文参考自: Lua 数据类型 | 菜鸟教程 (runoob.com) 希望详细了解的小伙伴还请查看上方链接: 八个基本类型 type - 函数查看数据类型: 测试程序: print(type("Hello world")) --> string print(type(10.4*3)) --> number print(t…...

dify/api/models/provider.py文件中的数据表
源码位置:dify/api/models/provider.py providers 表结构 字段英文名数据类型字段中文名字备注idStringUUIDIDtenant_idStringUUID租户IDprovider_nameString提供商名称provider_typeString提供商类型encrypted_configText加密配置is_validBoolean是否有效last_us…...

从入门到精通:网络基础详解
前言 在现代社会,网络技术已经成为我们日常生活和工作中不可或缺的一部分。从简单的网页浏览到复杂的分布式系统,网络技术都扮演着至关重要的角色。通过这篇文章,读者将从入门到精通,全面掌握网络编程的理论和实践。 重点摘要 …...

初步理解三__《面向互联网大数据的威胁情报 并行挖掘技术研究》
初步理解三 5类战术标签 gtp 收集开源的网络安全报告并将其转化为统一的文本格式,并且标注了5类战术标签是一个涉及到数据处理和分类的复杂任务。以下是一种可能的处理方法: 数据收集和整合: 使用网络爬虫或API访问工具收集开源的网络安全…...

【C++修行之道】string类的使用
目录 一.C语言中的字符串 二、标准库中的string类 (了解) 2.1 string类(了解) 2.2 帮助文档阅读 三、 string类的常用接口说明 3.1 string类对象的常见构造 3.2 string类对象的容量操作 3.3 string类对象的访问及遍历操作 字符串类的简单实现 3.4 string类对象的修改…...

云原生监控-Kubernetes-Promethues-Grafana
云原生监控-Prometheus 作者:行癫(盗版必究) 引读:本文章所涉及到技术点包括Prometheus、Grafana、Kuebrnetes;Prometheus基于外部构建采集并监控Kubernetes集群以及集群中的应用,例如使用mysql-node-exporter、nginx-node-exporter采集Kuebrnetes集群中的应用数据,使用…...

从入门到上岗,Java+AI 复合型人才养成攻略
当下编程行业格局正在悄然改变,纯 Java 后端岗位内卷日趋严重,薪资增长逐步放缓;纯粹的 AI 算法岗门槛居高不下,对学历、数理功底要求严苛,普通开发者很难入局。 而Java+AI 复合型开发顺势成为行业刚需岗位,既依托成熟的 Java 体系承接业务开发,又能融入人工智能技术实…...

C语言双端队列完整实现:一行代码吃透头尾操作,算法效率拉满
一、为什么C语言实现双端队列,是数据结构的必学天花板?在C语言数据结构里,队列、栈都是基础中的基础,但真正能把灵活度、效率、内存管理三者揉到一起的,还得是双端队列(deque)。普通队列只能一头…...

为什么视频代剪辑会影响你的内容传播效果
为什么你精心拍的视频,发出去却没人看? 你有没有过这样的经历:花了一整天拍Vlog,素材画质高清、内容真实,可一剪出来就显得平淡无奇,点赞寥寥?或者婚礼当天感动全场,回看成片却像流水…...
:执行计划教我做事)
开发转兼职DBA(二):执行计划教我做事
开发转兼职DBA(二):执行计划教我做事 查询慢了不知道为什么,加了索引还是慢,复合索引怎么建,执行计划怎么看——这些不是DBA的专利,是每个写SQL的开发者迟早要面对的事。 文章目录 开发转兼职DB…...

转行网络安全运维:从0到1的可落地指南
转行网络安全运维:从0到1的可落地指南 一、 「3个核心技能:从零起步也能会」 网上学习资料多到爆炸,不用纠结“哪个最好”,记住一句话:**能学会、能上手的就是好的**!不管是免费视频还是付费课,…...

Owl-Alpha 新手快速上手指南
在处理大规模数据或构建高性能应用时,我们常常会遇到一个棘手的问题:如何在不阻塞主线程的情况下,高效地执行耗时任务?无论是处理图像、解析大型文件,还是进行复杂的数学运算,传统的单线程模式往往会让界面…...

中兴光猫终极管理指南:解锁工厂模式与Telnet权限的实战教程
中兴光猫终极管理指南:解锁工厂模式与Telnet权限的实战教程 【免费下载链接】zteOnu A tool that can open ZTE onu device factory mode 项目地址: https://gitcode.com/gh_mirrors/zt/zteOnu 掌握中兴光猫的设备管理和权限获取能力是网络管理员和技术爱好者…...

电子商务设计师软考备战:特别篇 - 综合模拟与备考策略
1. 考试形式与内容结构1.1 考试基本信息考试科目与时间基础知识考试:上午9:00-11:30(150分钟)应用技术考试:下午2:00-4:30(150分钟)题型与分值分布上午考试(基础知识): -…...
)
大佬推荐的网络安全学习路线(从基础到高级,超级详细)
大佬推荐的网络安全学习路线(从基础到高级,超级详细) 说起网络安全,你可能会担心它是一个过时的行业。有人说,网络安全快卷死了,你既要攻又要防,并且随着技术的发展,你还要不断地学…...
)
在线文档协作工具选型必看:14款产品对比(2026版)
一、在线文档协作工具的概念解析及其核心功能 在线文档协作工具是基于云端的文档创建、编辑、共享与协同沟通平台,核心目标是让团队在同一份资料上“实时共同工作”,减少反复传文件、版本混乱与沟通成本。 企业常见的核心能力包括: 多人实…...