OpenCV中使用Canny算法在图像中查找边缘
- 操作系统:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 编程语言:C++11
算法描述
Canny算法是一种广泛应用于计算机视觉和图像处理领域中的边缘检测算法。它由John F. Canny在1986年提出,旨在寻找给定噪声条件下的最佳边缘检测算法。Canny算法的主要特点和步骤包括:
- 应用高斯滤波:首先,使用高斯滤波器平滑图像,以去除噪声并减少细节,这有助于后续步骤中的边缘检测。
- 计算梯度强度和方向:接下来,通过对平滑后的图像应用Sobel算子,计算每个像素的梯度强度和方向。梯度强度指示了边缘的强度,而方向指示了边缘的方向。
- 非极大值抑制:在计算了梯度之后,执行非极大值抑制(Non-maximum suppression)。这一步骤涉及检查每个像素的梯度强度是否是局部最大值。如果不是,则认为该像素不是边缘的一部分,因此将其强度设置为零。
- 双阈值检测和边缘连接:最后,应用两个阈值:低阈值和高阈值。高于高阈值的边缘被确认为真正的边缘,而低于低阈值的边缘则被抛弃。介于两阈值之间的边缘仅在与高于高阈值的边缘相连时才被保留,这是为了防止断断续续的边缘。
Canny算法因其在检测真实边缘的同时最大限度地减少错误检测和响应重复性方面的良好性能而受到推崇。在OpenCV中,可以通过调用Canny函数来应用Canny算法进行边缘检测
Canny函数
该函数使用Canny算法在输入图像中查找边缘,并在输出映射edges中标记它们。在threshold1和threshold2之间,较小的值用于边缘连接,而较大的值用于寻找初始的强边缘段。更多信息请参考Canny边缘检测器的维基百科页面:http://en.wikipedia.org/wiki/Canny_edge_detector
函数原型1
void cv::Canny
( InputArray image,OutputArray edges,double threshold1,double threshold2,int apertureSize = 3,bool L2gradient = false
)
参数1
- 参数image 8位输入图像.通常应该是灰度图像
- 参数 edges 输出的边缘图;单通道8位图像,其尺寸与image相同.这个输出图像将标记出检测到的边缘
- 参数threshold1 滞后阈值程序的第一阈值,这是一个较低的阈值,用于确定哪些边缘应被进一步考虑。低于此阈值的像素会被视为非边缘
- 参数threshold2 滞后阈值程序的第二阈值。这是一个较高的阈值,用于确定哪些边缘是强边缘。高于此阈值的像素将被确定为边缘
- 参数apertureSize Sobel算子的孔径大小。Sobel算子用于计算图像中每个像素的梯度,孔径大小决定了Sobel算子的大小,这会影响边缘检测的精细程度。
- 参数L2gradient 一个标志,指示是否应该使用更精确的 L 2 L_2 L2 n o r m = ( d I / d x ) 2 + ( d I / d y ) 2 norm=\sqrt{(dI/dx)^2 + (dI/dy)^2} norm=(dI/dx)2+(dI/dy)2 范数来计算图像的梯度大小(L2gradient=true),或者是否默认的 L 1 L_1 L1 n o r m = ∣ d I / d x ∣ + ∣ d I / d y ∣ norm=|dI/dx|+|dI/dy| norm=∣dI/dx∣+∣dI/dy∣ 范数就足够(L2gradient=false)。L2范数是梯度向量的欧几里得长度,而L1范数是梯度分量的绝对值之和。
函数原型2
这是一个重载成员函数,为了方便而提供。它与上述函数的不同之处仅在于它接受的参数。使用带有自定义图像梯度的Canny算法在图像中查找边缘
void cv::Canny
(InputArray dx,InputArray dy,OutputArray edges,double threshold1,double threshold2,bool L2gradient = false
)
参数2
- 参数dx 输入图像的16位x方向导数(类型为CV_16SC1或CV_16SC3)。这表示沿着x轴方向的图像梯度。
- 参数dy 输入图像的16位y方向导数(与dx同类型)。这表示沿着y轴方向的图像梯度。
- 参数 edges 输出的边缘图;单通道8位图像,其尺寸与image相同.这个输出图像将标记出检测到的边缘
- 参数threshold1 滞后阈值程序的第一阈值,这是一个较低的阈值,用于确定哪些边缘应被进一步考虑。低于此阈值的像素会被视为非边缘
- 参数threshold2 滞后阈值程序的第二阈值。这是一个较高的阈值,用于确定哪些边缘是强边缘。高于此阈值的像素将被确定为边缘
- 参数apertureSize Sobel算子的孔径大小。Sobel算子用于计算图像中每个像素的梯度,孔径大小决定了Sobel算子的大小,这会影响边缘检测的精细程度。
- 参数L2gradient 一个标志,指示是否应该使用更精确的 L 2 L_2 L2 n o r m = ( d I / d x ) 2 + ( d I / d y ) 2 norm=\sqrt{(dI/dx)^2 + (dI/dy)^2} norm=(dI/dx)2+(dI/dy)2 范数来计算图像的梯度大小(L2gradient=true),或者是否默认的 L 1 L_1 L1 n o r m = ∣ d I / d x ∣ + ∣ d I / d y ∣ norm=|dI/dx|+|dI/dy| norm=∣dI/dx∣+∣dI/dy∣ 范数就足够(L2gradient=false)。L2范数是梯度向量的欧几里得长度,而L1范数是梯度分量的绝对值之和。
代码示例
#include <opencv2/opencv.hpp>
#include <iostream>int main(int argc, char** argv)
{// 读取图像cv::Mat image = cv::imread("/media/dingxin/data/study/OpenCV/sources/images/fruit_small.jpg", cv::IMREAD_COLOR);if (!image.data){std::cout << "Error: Could not open or find the image." << std::endl;return -1;}// 转换为灰度图像cv::Mat grayImage;cv::cvtColor(image, grayImage, cv::COLOR_BGR2GRAY);// 使用Canny算法检测边缘cv::Mat edges;int lowThreshold = 50;int highThreshold = 150;cv::Canny(grayImage, edges, lowThreshold, highThreshold);// 显示原始图像和边缘图像cv::namedWindow("Original Image", cv::WINDOW_NORMAL);cv::imshow("Original Image", image);cv::namedWindow("Edges", cv::WINDOW_NORMAL);cv::imshow("Edges", edges);// 等待按键后关闭窗口cv::waitKey(0);return 0;
}
运行结果
原图:

边缘计算之后的图:

你可以调整lowThreshold和highThreshold的值再运行后观察边缘图像的变化,便于理解函数的使用。
相关文章:
OpenCV中使用Canny算法在图像中查找边缘
操作系统:ubuntu22.04OpenCV版本:OpenCV4.9IDE:Visual Studio Code编程语言:C11 算法描述 Canny算法是一种广泛应用于计算机视觉和图像处理领域中的边缘检测算法。它由John F. Canny在1986年提出,旨在寻找给定噪声条件下的最佳边…...

基于springboot+vue+uniapp的机电公司管理信息系统
开发语言:Java框架:springbootuniappJDK版本:JDK1.8服务器:tomcat7数据库:mysql 5.7(一定要5.7版本)数据库工具:Navicat11开发软件:eclipse/myeclipse/ideaMaven包&#…...

电子期刊制作实战教程:从零开始制作
随着互联网的普及,电子期刊已经成为了信息传递的重要载体。它以便捷、环保、互动性强等特点受到了越来越多人的青睐。那么,如何从零开始制作一份吸引人的电子期刊呢? 1.要制作电子杂志,首先需要选择一款适合自己的软件。比如FLBOOK在线制作…...

11.FreeRTOS_事件组
事件组概述 事件组的作用: 可以等待某一个事件发生可以等待若干个事件发生可以等待若干个事件中的某一个事件发生 同步点是事件组的另一个使用方式,它可以让多个任务进行阻塞等待,当全部事件完成后,再一起解除任务的阻塞。常常…...

Python爬虫-爬取三国演义文本数据-bs4
bs4进行数据解析 -数据解析的原理: - 1.标签定位 -2.提取标签、标签属性中存储的数据值 - bs4数据解析的原理: - 1.实例化一个BeautifulSoup对象,并且将页面源码数据加载到该对象中 -2.通过调用BeautifulSoup对象中相关的属性或者方法进行标签定位和数据提取 - 环境安装: - pi…...

html5——列表、表格
目录 列表 无序列表 有序列表 自定义列表 表格 基本结构 示例 表格的跨列 表格的跨行 列表 无序列表 <ul>【声明无序列表】 <li>河间驴肉火烧</li>【声明列表项】 <li>唐山棋子烧饼</li> <li>邯郸豆沫</li> <l…...
【Python字符串攻略】:玩转文字,编织程序的叙事艺术
文章目录 🚀一.字符串基础🌈二.查看数据类型⭐三.转化❤️四.字符串索引🚲五.字符串切片🎬六.字符串切片-步长☔七.反向切片注意事项🚲八.字符串💥查💥改💥删 ❤️九.字符串拼接&…...

element form表单中密码框被自动赋值,并默认背景色为白色,手动输值后背景色才是自己配置的背景色,与表单的自动填充有关
事件背景: 一个表单,有两组需要输入密码的地方,两组都被填充用户名密码,其中一组是其他信息,不是用户名密码,也被填充了,且input背景色是白色,表单中的input已经手动配置为无背景色&…...
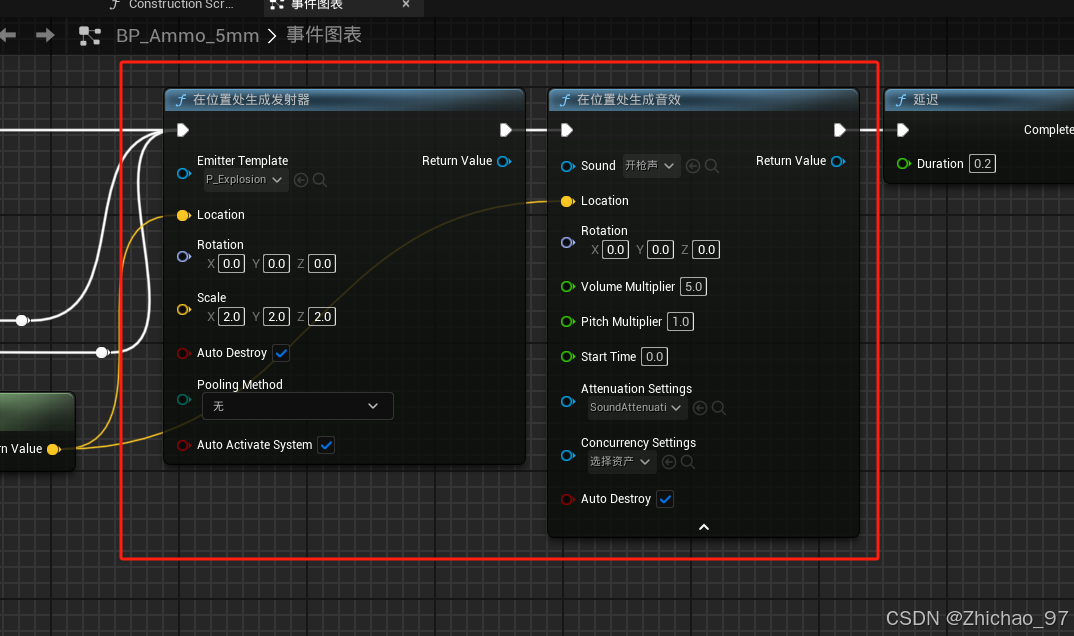
【UE5.1 角色练习】15-枪械射击——子弹发射物
目录 效果 步骤 一、创建并发射子弹 二、优化子弹 效果 步骤 一、创建并发射子弹 1. 在前面的文章中(【UE5.1 角色练习】06-角色发射火球-part1)我们创建了蓝图“BP_Skill_FireBall” 这里我们复制一份命名为“BP_Ammo_5mm”,用于表示…...

Zynq7000系列FPGA中的DMA控制器的编程限制
有关DMAC编程时适用的限制信息,有四个考虑因素: 固定非对齐突发Endian swap size restrictions:在数据传输或处理过程中,不同字节序(Endian)之间的转换和对应的限制在DMA周期内更新通道控制寄存器当MFIFO满…...
超简易高效的 AI绘图工具—与sd-webui一致界面,6G显存最高提升75%出图速率!(附安装包)
大家好,我是灵魂画师向阳 今天给大家分享一个基于Stable Diffusion WebUI 构建的AI绘图工具—sd-webui-forge,该工具的目标在于简化插件开发,优化资源管理,加速推理。 Forge承诺永远不会对Stable Diffusion WebUI用户界面添加不…...

ArduPilot开源代码之OpticalFlow_backend
ArduPilot开源代码之OpticalFlow_backend 1. 源由2. Library设计3. 重要例程3.1 OpticalFlow_backend::_update_frontend3.2 OpticalFlow_backend::_applyYaw 4. 总结5. 参考资料 1. 源由 光流计是一种低成本定位传感器,所有的光流计设备传感驱动代码抽象公共部分统…...

设计模式探索:适配器模式
1. 适配器模式介绍 1.1 适配器模式介绍 适配器模式(adapter pattern)的原始定义是:将一个类的接口转换为客户期望的另一个接口,适配器可以让不兼容的两个类一起协同工作。 适配器模式的主要作用是把原本不兼容的接口,…...

OpenCV 寻找棋盘格角点及绘制
目录 一、概念 二、代码 2.1实现步骤 2.2完整代码 三、实现效果 一、概念 寻找棋盘格角点(Checkerboard Corners)是计算机视觉中相机标定(Camera Calibration)过程的重要步骤。 OpenCV 提供了函数 cv2.findChessboardCorners…...

【深度学习】PyTorch深度学习笔记02-线性模型
1. 监督学习 2. 数据集的划分 3. 平均平方误差MSE 4. 线性模型Linear Model - y x * w 用穷举法确定线性模型的参数 import numpy as np import matplotlib.pyplot as pltx_data [1.0, 2.0, 3.0] y_data [2.0, 4.0, 6.0]def forward(x):return x * wdef loss(x, y):y_pred…...

10.FreeRTOS_互斥量
互斥量概述 在博文“ FreeRTOS_信号量 ”中,使用了二进制信号量实现了互斥,保护了串口资源。博文链接如下: FreeRTOS_信号量-CSDN博客 但还是要引入互斥量的概念。互斥量与二进制信号量相比,能够多实现如下两个功能:…...

EtherCAT总线冗余让制造更安全更可靠更智能
冗余定义 什么是总线冗余功能?我们都知道,EtherCAT现场总线具有灵活的拓扑结构,设备间支持线型、星型、树型的连接方式,其中线型结构简单、传输效率高,大多数的现场应用中也是使用这种连接方式,如下图所示…...

Android IdleHandler源码分析
文章目录 Android IdleHandler源码分析概述前提基本用法源码分析添加和删除任务执行任务 应用场景 Android IdleHandler源码分析 概述 IdleHandler是一个接口,它定义在MessageQueue类中,用于在主线程的消息队列空闲时执行一些轻量级的任务。IdleHandle…...

Mac安装stable diffusion 工具
文章目录 1.安装 Homebrew2.安装 stable diffusion webui 的依赖3.下载 stable diffusion webui 代码4.启动 stable diffusion webui 本体5.下载模型6.这里可能会遇到一个clip-vit-large-patch14报错 参考:https://brew.idayer.com/install/stable-diffusion-webui/…...

CVE-2024-6387Open SSH漏洞彻底解决举措(含踩坑内容)
一、漏洞名称 OpenSSH 远程代码执行漏洞(CVE-2024-6387) 二、漏洞概述 Open SSH是基于SSH协议的安全网络通信工具,广泛应用于远程服务器管理、加密文件传输、端口转发、远程控制等多个领域。近日被爆出存在一个远程代码执行漏洞,由于Open SSH服务器端…...

MinIO集群敏感信息泄露漏洞CVE-2023-28432深度解析
1. 这个漏洞不是“配置没关好”,而是MinIO架构里埋着的定时炸弹MinIO集群模式下的敏感信息泄露漏洞(CVE-2023-28432)——光看标题,很多人第一反应是:“哦,又一个管理员忘了关调试接口?”我最初也…...

Cursor Free VIP破解工具:5步实现永久免费使用的完整解决方案
Cursor Free VIP破解工具:5步实现永久免费使用的完整解决方案 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve reached y…...

【Elasticsearch从入门到精通】第26篇:Elasticsearch Term级别查询——精确匹配与范围查询
上一篇【第25篇】Elasticsearch全文检索——match、phrase与query_string详解 下一篇【第27篇】Elasticsearch复合查询——bool、dis_max与function_score 摘要 与全文检索的模糊匹配不同,Term级别查询用于结构化数据的精确检索,不对查询词进行分词分析…...

UnityExplorer自由视角相机终极指南:3种模式带你突破游戏视角限制
UnityExplorer自由视角相机终极指南:3种模式带你突破游戏视角限制 【免费下载链接】UnityExplorer An in-game UI for exploring, debugging and modifying IL2CPP and Mono Unity games. 项目地址: https://gitcode.com/gh_mirrors/un/UnityExplorer 你是否…...

答案不在知识库内,改改 RAG 提示词这样就够了吗?
今天抛出一个问题,如果你的 RAG 系统检索到了垃圾文档,它会不会编一个听起来像模像样的答案? 提示词中写了“不知道就别答”,能管住吗? 介绍下 CRAG 这种方案。 传统 RAG 有一个沉默的故障模式 先说个案例。 某企业…...

Mac Mouse Fix技术架构深度解析:如何通过系统级事件拦截实现鼠标功能增强
Mac Mouse Fix技术架构深度解析:如何通过系统级事件拦截实现鼠标功能增强 【免费下载链接】mac-mouse-fix Mac Mouse Fix - Make Your $10 Mouse Better Than an Apple Trackpad! 项目地址: https://gitcode.com/GitHub_Trending/ma/mac-mouse-fix 在macOS生…...

KLayout 0.29.12版图编辑工具:DRC验证引擎性能提升20%与多工艺节点设计支持
KLayout 0.29.12版图编辑工具:DRC验证引擎性能提升20%与多工艺节点设计支持 【免费下载链接】klayout KLayout Main Sources 项目地址: https://gitcode.com/gh_mirrors/kl/klayout KLayout是一款开源的集成电路版图编辑与验证工具,专注于GDSII/O…...

边缘检测:Prewitt算子与Roberts算子的对比使用
边缘检测:Prewitt算子与Roberts算子的对比使用📚 本章学习目标:深入理解Prewitt算子与Roberts算子的对比使用的核心概念与实践方法,掌握关键技术要点,了解实际应用场景与最佳实践。本文属于《计算机视觉教程》特征提取…...

麒麟KYLINOS V10 SP1开机自动登录保姆级教程:图形界面与命令行两种方法详解
麒麟KYLINOS V10 SP1开机自动登录全攻略:从原理到实战的双轨配置方案每次开机都要输入密码,对于家庭媒体中心或特定测试环境用户来说,确实是个效率瓶颈。KYLINOS作为国产操作系统的代表,其V10 SP1版本通过LightDM显示管理器提供了…...

SPT-AKI存档编辑器终极指南:掌握《逃离塔科夫》单机版修改技巧
SPT-AKI存档编辑器终极指南:掌握《逃离塔科夫》单机版修改技巧 【免费下载链接】SPT-AKI-Profile-Editor Программа для редактирования профиля игрока на сервере SPT-AKI 项目地址: https://gitcode.com/gh_m…...