AGV平面坐标系变换公式及实例
1、AGV坐标系简介

如上图,小车前后对角是有激光雷达的,其坐标系称为激光坐标系,采用极坐标系体现。中间为车体坐标系,激光坐标系相对于车体坐标系关系不变;左下角是地图坐标系,小车扫图后,建立的坐标系即为地图坐标系,小车在运动过程中,车体坐标系相对于地图坐标系是变化的。
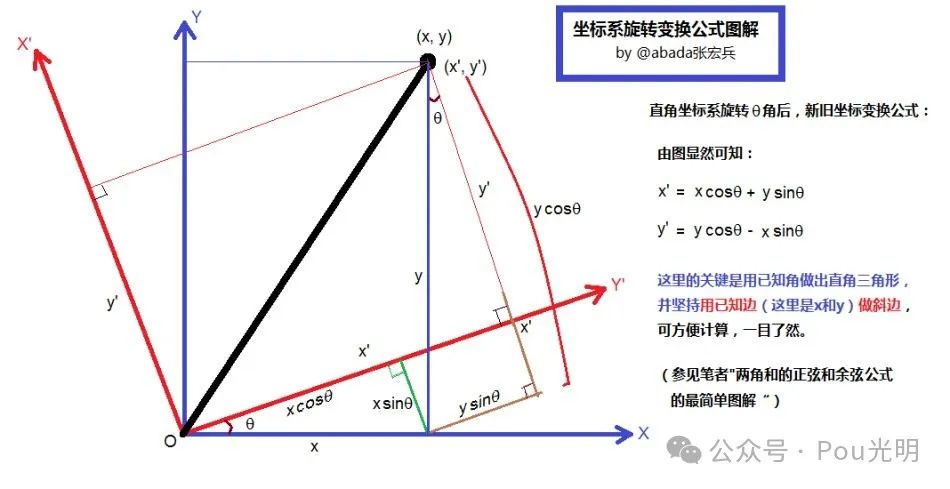
2、坐标系旋转与点旋转的变换公式
坐标系旋转:
直角坐标系 XOY逆时针旋转 θ角后变成 X′OY′,原坐标系内点的坐标变化为:

如果是顺时针旋转,则将 𝜃 改为 −𝜃 带入公式。
另一种表达方式:
即X′OY′坐标系相对于“静止”XOY坐标系顺时针旋转:
x1=xcos(β)+ysin(β);
y1=ycos(β)-xsin(β);
X′OY′坐标系相对于“静止”XOY坐标系逆时针旋转:
x1=xcos(β)-ysin(β);
y1=ycos(β)+xsin(β);
坐标系旋转公式推导图1
点的旋转:
直角坐标系 XOY内的点 A(x,y)绕原点逆时针旋转 α 角后得到点 B(x′,y′),两点坐标关系为:

3、小车中激光雷达点云转换例子实战

再次温习这个图。
①激光的点云由极坐标点转直角坐标系点:
x=r⋅cos(θ)
y=r⋅sin(θ)
直角坐标转极坐标系:


②激光坐标系转小车坐标系
这两个坐标系相对关系固定,激光坐标系相对于小车坐标系的变换可以认为是小车坐标系旋转到激光坐标系,这样激光坐标系的点就映射到了小车坐标系。实际中,除了旋转还有原点位置的偏差,这块直接加上差值即可,差值是激光坐标系原点相对于小车坐标系坐标系原点的参数,接口可以获取。
灵魂代码如下:
cartesian_x = dist*cos(angle+install_info_yaw) + install_info_x;
cartesian_y = dist*sin(angle+install_info_yaw) + install_info_y;展开后发现是激光雷达坐标的install_info_yaw相对于小车坐标系都是逆时针数据。
③小车坐标系下的雷达点云数据相对于地图坐标系的转换
此时地图坐标系是“静止”的,那么接口给出的小车实时位置x,y和yaw信息是相对于
地图坐标系的。根据坐标系旋转公式推导图1,已知的是红色坐标系下的点(小车坐标系),求蓝色坐标系下的点(地图坐标系),即已知x’,y’,θ求x,y。我的处理方式是求旋转矩阵的逆,然后再求出x,y,用的eigen库。坐标系旋转都是相对的,后面想起更好的方式再记录。
if(robot_push_data_.angle > 0){float agv_yal = -robot_push_data_.angle;Eigen::Matrix2d r;r << cos(agv_yal), sin(agv_yal),-sin(agv_yal), cos(agv_yal);Eigen::MatrixXd pos(2,1);pos(0,0) = cartesian_x;pos(1,0) = cartesian_y;Eigen::MatrixXd posnew(2,1);posnew = r.inverse()*pos;cartesian_x = posnew(0,0) + robot_push_data_.x;cartesian_y = posnew(1,0) + robot_push_data_.y;
}欢迎关注!探索不同。
相关文章:
AGV平面坐标系变换公式及实例
1、AGV坐标系简介 如上图,小车前后对角是有激光雷达的,其坐标系称为激光坐标系,采用极坐标系体现。中间为车体坐标系,激光坐标系相对于车体坐标系关系不变;左下角是地图坐标系,小车扫图后,建立的…...

es切片和集群
解决单点故障 支持高并发 解决海量数据 1.cluster 集群:包含多个节点,每个节点属于哪个集群是通过一个集群名称(集群名称,默认是elasticsearch)来决定的,对于中小型应用来说,刚开始一个集群就…...
IEEE官方列表会议 | 第三届能源与环境工程国际会议(CFEEE 2024)
会议简介 Brief Introduction 2024年第三届能源与环境工程国际会议(CFEEE 2024) 会议时间:2024年12月2日-4日 召开地点:澳大利亚凯恩斯 大会官网:CFEEE 2024-2024 International Conference on Frontiers of Energy and Environment Engineer…...

深度学习中的正则化技术 - Dropout篇
序言 在深度学习的浩瀚领域中,模型过拟合一直是研究者们面临的挑战之一。当模型在训练集上表现得近乎完美,却难以在未见过的数据(测试集)上保持同样优异的性能时,过拟合现象便悄然发生。为了有效缓解这一问题…...
 》)
《昇思 25 天学习打卡营第 18 天 | 扩散模型(Diffusion Models) 》
《昇思 25 天学习打卡营第 18 天 | 扩散模型(Diffusion Models) 》 活动地址:https://xihe.mindspore.cn/events/mindspore-training-camp 签名:Sam9029 扩散模型(Diffusion Models) 扩散模型概述 扩散模…...

【Django+Vue3 线上教育平台项目实战】Elasticsearch实战指南:从基础到构建课程搜索与数据同步接口
文章目录 前言一、Elasticsearch倒排索引 二、Docker 搭建 ESDocker 安装Docker 搭建 ES 三、ES基础语法创建索引查看索引删除索引添加数据查询数据修改数据删除数据条件查询分页查询排序 多条件查询andor 范围查询 四、ES在项目中的应用示例 前言 在数据驱动的时代,…...

libtins初探-抓包嗅探
libtin 一、概述1. 可移植性2. 特性 二、基础知识1. PDU2. 地址类3. 地址范围类4. 网络接口5. 写pcap文件 三、嗅探1.嗅探基础2. 嗅探器配置3. 循环嗅探4. 使用迭代器嗅探6. 包对象7. 读取pcap文件8. 包的解析 四、发送包1. 发送网络层pdu2. 发送链路层pdu3. 发送和接收响应校验…...

大语言模型-Bert-Bidirectional Encoder Representation from Transformers
一、背景信息: Bert是2018年10月由Google AI研究院提出的一种预训练模型。 主要用于自然语言处理(NLP)任务,特别是机器阅读理、文本分类、序列标注等任务。 BERT的网络架构使用的是多层Transformer结构,有效的解决了长…...

bug诞生记——动态库加载错乱导致程序执行异常
大纲 背景问题发生问题猜测和分析过程是不是编译了本工程中的其他代码是不是有缓存是不是编译了非本工程的文件是不是调用了其他可执行文件查看CMakefiles分析源码检查正在运行程序的动态库 解决方案 这个案例发生在我研究ROS 2的测试Demo时发生的。 整体现象是:修改…...

Matlab演示三维坐标系旋转
function showTwo3DCoordinateSystemsWithAngleDifference() clear all close all % 第一个三维坐标系 origin1 [0 0 0]; x_axis1 [1 0 0]; y_axis1 [0 1 0]; z_axis1 [0 0 1];% 绕 x 轴旋转 30 度的旋转矩阵 theta_x 30 * pi / 180; rotation_matrix_x [1 0 0; 0 cos(th…...

redis的持久化机制以及集群模式
1.redis的持久化机制 内存数据库具有高速读写的优势,但由于数据存储在内存中,一旦服务器停止或崩溃,所有数据将会丢失。持久化机制的引入旨在将内存中的数据持久化到磁盘上,从而在服务器重启后能够恢复数据,提供更好的…...

【论文解读】大模型算法发展
一、简要介绍 论文研究了自深度学习出现以来,预训练语言模型的算法的改进速度。使用Wikitext和Penn Treebank上超过200个语言模型评估的数据集(2012-2023年),论文发现达到设定性能阈值所需的计算大约每8个月减半一次,95%置信区间约为5到14个月…...

WebApi配置Swagger、Serilog、NewtonsoftJson、Sqlsugar、依赖注入框架Autofac、MD5加密
文章目录 项目准备1、创建WebApi项目配置Swagger、Serilog、NewtonsoftJsonNewtonsoftJsonSwaggerSerilog 使用ORM框架SqlSugar创建Service类库构成MVC框架使用AutoFac进行依赖注入 创建用户登录接口添加用户时进行安全防护 项目准备 1、创建WebApi项目 配置Swagger、Serilog…...

【ffmpeg命令基础】视频选项讲解
文章目录 前言设置输出文件的帧数设置每秒播放的帧数设置输出视频的帧率示例1:更改输出视频的帧率示例2:将图像序列转换为视频 设置输入视频的帧率示例3:处理高帧率视频示例4:处理低帧率视频 同时设置输入和输出帧率示例5…...

使用uniapp开发小程序(基础篇)
本文章只介绍微信小程序的开发流程,如果需要了解其他平台的开发的流程的话,后续根据情况更新相应的文章,也可以根据uniapp官网的链接了解不同平台的开发流程 HBuilderX使用:https://uniapp.dcloud.net.cn/quickstart-hx.html 开发工具 开始…...

vue3【详解】组合式函数
什么是组合式函数? 利用 Vue 的组合式 API 来封装和复用有状态逻辑的函数,用于实现逻辑复用,类似 react18 中的 hook 函数名称 – 以 use 开头,采用驼峰命名,如 useTitle参数 – 建议使用 toValue() 处理(…...
微服务实战系列之玩转Docker(六)
前言 刚进入大暑,“清凉不肯来,烈日不肯暮”,空调开到晚,还是满身汗。——碎碎念 我们知道,仓库可见于不同领域,比如粮食仓库、数据仓库。在容器领域,自然也有镜像仓库(registry&…...

Python题解Leetcode Hot100之动态规划
动态规划解题步骤-5部曲 确定dp数组(dp table)以及下标的含义确定递推公式dp数组如何初始化确定遍历顺序举例推导dp数组 70. 爬楼梯 题目描述 假设你正在爬楼梯。需要 n 阶你才能到达楼顶。每次你可以爬 1 或 2 个台阶。你有多少种不同的方法可以爬到…...

你了解GD32 MCU上下电要求吗
你了解GD32 MCU的上下电要求吗?MCU的上下电对于系统的稳定运行非常重要。 以GD32F30X为例,上电/掉电复位波形如如下图所示。 上电过程中,VDD/VDDA电压上电爬坡,当电压高于VPOR(上电复位电压)MCU开始启动&a…...

二、【Python】入门 - 【PyCharm】安装教程
往期博主文章分享文章: 【机器学习】专栏http://t.csdnimg.cn/sQBvw 目录 第一步:PyCharm下载 第二步:安装(点击安装包打开下图页面) 第三步:科学使用,请前往下载最新工具及教程:…...

LangGraph入门:构建有状态的AI Agent工作流
LangGraph 入门:用状态图构建 Agent手写 ReAct 循环容易写出 bug。LangGraph 用「状态图」的方式定义 Agent,把每一步定义为一个节点,跳转逻辑定义为边——清晰、可测试、可扩展。一、为什么需要 LangGraph 手写 Agent 循环的痛点:…...
)
FPGA+DDR3+千兆以太网:构建实时高清图像传输与显示系统(附源码)
1. 实时高清图像传输系统的核心价值 想象一下这样的场景:医疗内窥镜手术中,医生需要实时查看1080p高清影像;工业检测线上,高速摄像头每秒产生数百帧4K画面;无人机航拍时,需要将拍摄的高清视频实时回传到地面…...

终极指南:3步重塑你的Windows桌面视觉体验
终极指南:3步重塑你的Windows桌面视觉体验 【免费下载链接】TranslucentTB A lightweight utility that makes the Windows taskbar translucent/transparent. 项目地址: https://gitcode.com/gh_mirrors/tr/TranslucentTB 想象一下,当你专注工作…...

WarcraftHelper:魔兽争霸3终极增强插件,让经典游戏在现代电脑焕发新生
WarcraftHelper:魔兽争霸3终极增强插件,让经典游戏在现代电脑焕发新生 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper Warcraf…...
)
瑞萨RA系列MCU入门实战:用e2 studio和FSP库5分钟点灯(从安装到烧录)
瑞萨RA系列MCU五分钟极速入门:从零点亮LED的全流程解析 当一块全新的瑞萨RA系列开发板第一次在你手中亮起LED时,那种"Hello World"式的成就感往往能瞬间点燃学习热情。不同于传统教程按部就班的软件安装介绍,本文将带您体验实战驱…...

【亲测免费】 CISP-DSG 数据安全培训教材课件标准版
CISP-DSG 数据安全培训教材课件标准版 【下载地址】CISP-DSG数据安全培训教材课件标准版 本仓库提供的是“注册数据安全治理专业人员”(Certified Information Security Professional - Data Security Governance,简称 CISP-DSG)的培训教材课…...

绝大多数主流中间件、框架,底层都是靠反射做能力扩展、插件化、自定义适配
完全没错,绝大多数主流中间件、框架,底层都是靠反射做能力扩展、插件化、自定义适配框架本身只写通用骨架,把扩展口子留给反射,让业务 / 第三方自己填逻辑。一、核心逻辑框架定死主干流程,不写死具体业务类、实现类预留…...

ClassiCube多平台适配技术:从桌面到移动再到游戏主机的实现细节
ClassiCube多平台适配技术:从桌面到移动再到游戏主机的实现细节 【免费下载链接】ClassiCube Custom Minecraft Classic / ClassiCube client written in C from scratch (formerly ClassicalSharp in C#) 项目地址: https://gitcode.com/gh_mirrors/cla/ClassiCu…...

长期项目使用 Taotoken 聚合 API 在模型选型与切换上的便利性体验
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 长期项目使用 Taotoken 聚合 API 在模型选型与切换上的便利性体验 在一个持续数月的研发项目中,我们构建了一个需要集成…...

【ElevenLabs企业级克隆部署白皮书】:单模型支持12种语境情绪、延迟<480ms、通过GDPR+CCPA双认证
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs企业级语音克隆技术全景概览 ElevenLabs 企业级语音克隆技术以高保真度、低延迟和强可控性为核心,面向金融客服、跨国培训、无障碍内容生成等关键业务场景提供端到端语音合成解决…...