飞速创新更新IPO招股书:计划募资约14亿元,向伟为实际控制人
近日,深圳市飞速创新技术股份有限公司(下称“飞速创新”)预披露更新招股书,准备在深圳证券交易所主板上市。本次冲刺上市,飞速创新计划募资13.54亿元,招商证券为其保荐机构。
据介绍,飞速创新专注于网络通信领域核心设备及通用配件的研发、设计和销售,为客户提供通信设备、通用配件及系统解决方案的一站式供应。目前,该公司已在中国、美国、德国、澳大利亚、新加坡、英国、日本建立了全球仓储及服务中心,在俄罗斯建立了服务中心。
飞速创新在招股书中称,该公司的已开发超过7万个SKU的核心设备及通用配件,主要产品包括网络设备、光传输设备、光模块及高速线缆、光纤跳线及尾纤、光纤配线管理产品、铜缆综合布线产品、测试仪器及工具等。
天眼查信息显示,飞速创新成立于2009年,前称为深圳市宇轩网络技术有限公司。目前,该公司的注册资本为3.6亿元,法定代表人为向伟,股东包括向伟、吴敦向、海通证券旗下海通创新等。
截至报告期末,飞速创新的自营互联网平台fs.com上全球累计注册客户近29万家,覆盖全球近200个国家与地区。2021年,平台全年下单客户近7万家,平台全年订单数近25万单。
据介绍,飞速创新的客户包括各类型企业(互联网公司、科技类公司、金融类公司等)、运营商(电信运营商、数据中心运营商等)、信息技术服务商(网络设施服务商、云服务提供商等),以及公共部门(政府部门、教育机构等)。
2019年、2020年、2021年和2022年上半年,飞速创新的营收分别为9.32亿元、11.80亿元、15.82亿元和9.17亿元,净利润分别为1.36亿元、1.30亿元、2.80亿元和1.43亿元,扣非后净利润分别为1.32亿元、1.23亿元、2.70亿元和1.33亿元。
贝多财经发现,飞速创新的收入主要由光模块及高速线缆贡献。报告期内,飞速创新来自光模块及高速线缆的收入分别为4.96亿元、6.51亿元、7.98亿元和4.38亿元,占主营业务收入的比例分别为53.24%、55.24%、50.48%和47.78%。
飞速创新在招股书中称,根据传速速率,该公司光模块产品主要分为100/200/400/800G光模块系列、25/40/50G光模块系列、10/16/32G光模块系列和100M/1G/2G/2.5G/4G光模块系列。
招股书显示,飞速创新的收入主要来自境外。报告期内,境外销售占飞速创新主营业务收入的比例分别为97.95%、98.89%、99.15%和99.28%。其中,美国为主要收入来源,销售额占该公司主营业务收入的比重分别为45.79%、45.77%、43.58%和46.50%。
随着销售规模的扩大及业务的快速增长,飞速创新的待售存货规模呈总体上升趋势。报告期各期末,该公司存货账面价值分别为1.96亿元、3.85亿元、2.91亿元和3.65亿元,占其总资产的比例分别为22.00%、35.29%、17.61%和19.95%。
另据招股书披露,截至2022年6月底,飞速创新的研发和技术人员达412人,占总人数的27.34%。报告期内,该公司的研发费用分别为6560.76万元、8104.48万元、9151.90万元和4720.45万元,占营业收入的比重为7.04%、6.87%、5.78%和5.15%。
截至2022年8月8日,飞速创新及其子公司已取得境内主要专利185件。截至查询日,该公司及其子公司已取得境外主要专利78件;境内外合计263项专利,其中10项发明专利,87项实用新型专利,166项外观专利。
而智慧芽数据显示,飞速创新共有256项专利申请信息,其中发明专利33项,占比12.89%,分布在多个国家/地区。通过算法分析,该企业的专利布局主要专注在光模块、光纤配线箱、立体图、适配器、光纤连接器等技术领域。
本次上市前,向伟为飞速创新的控股股东、实际控制人。其中,向伟直接持有20,392.8528万股,占股份总数的56.6469%;通过担任宇轩成长、宇轩进取及宇轩稳健普通合伙人间接合计控制4.5089%的股份,合计控制61.1558%的股份,并担任该公司的董事长、总经理。
除控股股东、实际控制人向伟以外,其他持有飞速创新5%以上股份的股东为福鹏叁号、杨杰。此外,持有该公司4.8652%股份的股东福鹏捌号与福鹏叁号均为福鹏资产管理的基金,受同一方控制。
IPO前,杨杰直接持有飞速创新1,693.0897万股股份,占该公司股份总数的4.7030%,并通过福鹏叁号、深圳驰裕间接持有该公司459.2880万股股份,占飞速创新股份总数的1.2758%,合计持有该公司5.9788%股份。
此外,海通投资持股4.4636%,红土一号持股2.2727%,嘉远创富持股1.6106%,明诚一期持股1.1394%,泰亚投资持股1.0811%,其余单个股东的持股比例均不足1%。
相关文章:

飞速创新更新IPO招股书:计划募资约14亿元,向伟为实际控制人
近日,深圳市飞速创新技术股份有限公司(下称“飞速创新”)预披露更新招股书,准备在深圳证券交易所主板上市。本次冲刺上市,飞速创新计划募资13.54亿元,招商证券为其保荐机构。 据介绍,飞速创新专…...
 的常见类)
JUC(java.util.concurrent) 的常见类
1.ReentrantLock 可重入互斥锁. 和 synchronized 定位类似, 都是用来实现互斥效果, 保证线程安全. ReentrantLock 也是可重入锁. "Reentrant" 这个单词的原意就是 "可重入. ReentrantLock 的用法: lock(): 加锁, 如果获取不到锁就死等.trylock(超时时间):…...

Angular4 中 ckeditor5 插件的使用
Angular4 中 ckeditor5 插件的使用 0 环境、新建项目 环境: Windows10Angular/cli1.4.10(安装 Angular 的过程略过,Angular4 版本比较古老,这也导致项目安装插件及其他操作比较麻烦) 1. ckeditor5 官方用法 基础用…...

[python刷题模板] 前缀函数/next数组/kmp算法
[python刷题模板] 前缀函数/next数组/kmp算法 一、 算法&数据结构1. 描述2. 复杂度分析3. 常见应用4. 常用优化二、 模板代码1. 裸前缀函数2. 树上kmp3. 裸kmp三、其他四、更多例题五、参考链接一、 算法&数据结构 1. 描述 前缀函数和next数组基本上是一个东西&#…...

rust 程序设计语言入门(1)
本文是阅读《Rust程序设计语言》的学习记录,配合视频《Rust编程语言入门教程》食用更佳 环境搭建 windows下载rustup_init.exe,点击安装,默认选择msvc的toolchain,一路default即可 解决下载慢的问题,在powershell中修…...

基于蜣螂算法改进的LSTM预测算法-附代码
基于蜣螂算法改进的LSTM预测算法 文章目录基于蜣螂算法改进的LSTM预测算法1.数据2.LSTM模型3.基于蜣螂算法优化的LSTM4.测试结果5.Matlab代码摘要:为了提高LSTM数据的预测准确率,对LSTM中的参数利用蜣螂搜索算法进行优化。1.数据 采用正弦信号仿真数据&…...

Python安全开发——Scapy流量监控模块watchdog
目录 Python蓝队项目说明 (一)Python-蓝队项目-Scapy流量分析 0x01 Scapy参数介绍...

阶段二5_集合ArrayList
一.对象数组 1.对象数组使用案例 需求:将(张三,23)(李四,24)(王五,25) 封装为3个学生对象并存入数组 随后遍历数组,将学生信息输出在控制台 思路…...

十一、Python——匿名函数
1.匿名函数:简化函数定义 2.格式 lambda 参数1,参数2…:运算 3.匿名函数特点 不需要指明函数名定义只有一条语句函数体必须是一个表达式不能显示使用return 4.匿名函数实现求和 s lambda a,b:a b result s(1,2) print(result) # 35.匿名函数作…...
数组常使用的方法
1. join (原数组不受影响)该方法可以将数组里的元素,通过指定的分隔符,以字符串的形式连接起来。返回值:返回一个新的字符串const arr[1,3,4,2,5]console.log(arr.join(-);//1-3-4-2-52. push该方法可以在数组的最后面,添加一个或者多个元素结构: arr.push(值)返回值…...

2023华为软件测试笔试面试真题,抓紧收藏不然就看不到了
一、选择题 1、对计算机软件和硬件资源进行管理和控制的软件是(D) A.文件管理程序 B.输入输出管理程序 C.命令出来程序 D.操作系统 2、在没有需求文档和产品说明书的情况下只有哪一种测试方法可以进行的(A) A.错误推测法测…...
洛谷2月普及组(月赛)
🌼小宇(治愈版) - 刘大拿 - 单曲 - 网易云音乐 OI赛制且难度对标蓝桥杯省赛(😥真难,第三题做了几百年,第四题只敢骗骗分) 花了10块钱🙃 买官网的思路,结果…...

【博学谷学习记录】超强总结,用心分享 | 架构师 Spring源码学习总结
文章目录Spring的循环依赖1.循环依赖的定义&&原因2.循环依赖的场景1.构造器注入引起循环依赖2.Field属性setter注入的循环依赖3.循环依赖解决思路4.三级缓存5.面试题[三级缓存]AOP源码深度剖析概述Spring AOP的前世今生实现机制**JDK 动态代理****CGLIB 代理**流程总结…...
Linux C/C++ timeout命令实现(运行具有时间限制)
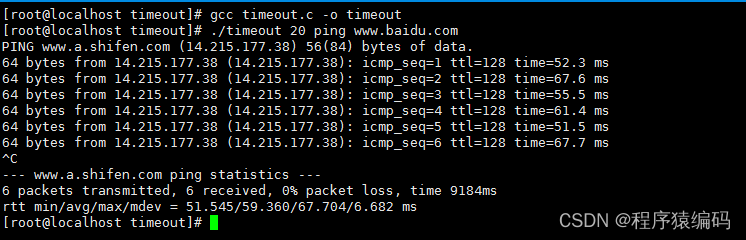
Linux附带了大量命令,每个命令都是唯一的,并在特定情况下使用。Linux timeout命令的一个属性是时间限制。可以为任何命令设置时间限制。如果时间到期,命令将停止执行。 如何使用timeout命令 我们将解释如何使用Linux timeout命令 timeout […...
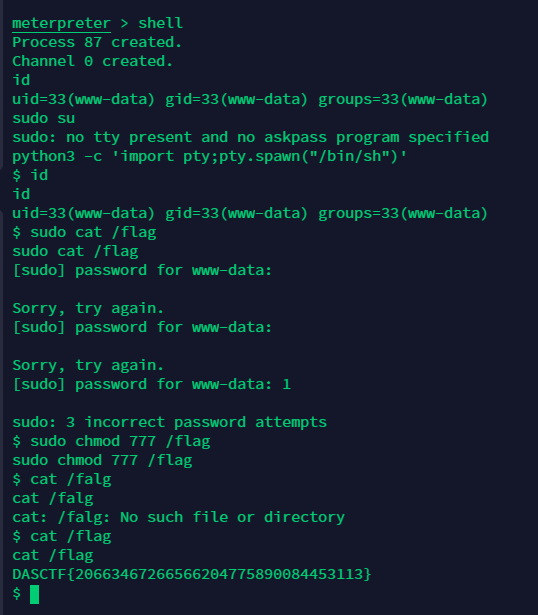
西湖论剑初赛web wp
Node Magical Login 简单的js代码审计。 Flag分成了两部分。 第一部分: 这里就简单的判断了一下user是否等于admin,直接绕过。 第二部分: checkcode ! “aGr5AtSp55dRacer”,让其为真,利用数组绕过。 Flag为&#x…...

【YOLOv8/YOLOv7/YOLOv5系列算法改进NO.55】融入美团最新QARepVGG
文章目录 前言一、解决问题二、基本原理三、添加方法四、总结前言 作为当前先进的深度学习目标检测算法YOLOv8,已经集合了大量的trick,但是还是有提高和改进的空间,针对具体应用场景下的检测难点,可以不同的改进方法。此后的系列文章,将重点对YOLOv8的如何改进进行详细…...

Flutter Windows端打包并生成可安装文件流程
Windows打包 1.首先安装visual Studio 下载地址:https://visualstudio.microsoft.com/zh-hans/ 下载成功后按照下图勾选桌面应用和移动应用下的使用C的桌面开发,勾选右侧安装详细信息中的windows 11/10 sdk 中的任意一个完成安装即可 2.打包Windows …...
凸优化学习:PART3凸优化问题(持续更新)
凸优化问题 凸优化问题的广义定义: 目标函数为凸函数约束集合为凸集 一、优化问题 基本用语 一般优化问题的描述: minimizef0(x)subject to fi(x)⩽0,i1,⋯,mhi(x)0,i1,⋯,p(1)\begin{array}{ll} \operatorname{minimize} & f_0(x) \\ \text { s…...
)
[ue4] 着色器绑定(Shader Binding)
当我们在ue4中制作了一个美术材质之后,引擎本身会为我们做很多事情,它会把结点翻译为hlsl,生成多个shader变体,并在多个mesh pass中去选择性的调用所需的shader,其中一个重要的过程就是获取shader绑定的数据。 本文将主…...

Rust语言之迭代器
文章目录Rust迭代器Rust迭代器的实现Iterator特型IntoIterator特型for循环与迭代器迭代器类型再看for循环实现自定义迭代器方式一方式二相关参考Rust迭代器 Rust语言内置了迭代器模式,用于实现对一个项的序列进行特定的处理,通常配合for循环使用。当我们…...

[AI开发工具] Cursor Pro功能扩展技术指南:突破免费版限制的系统方法
[AI开发工具] Cursor Pro功能扩展技术指南:突破免费版限制的系统方法 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: Youve re…...
的适配方案)
wan2.1-vae开源可部署:支持国产操作系统(麒麟/UOS)的适配方案
wan2.1-vae开源可部署:支持国产操作系统(麒麟/UOS)的适配方案 1. 平台介绍 muse/wan2.1-vae 文生图是基于 Qwen-Image-2512 模型的AI图像生成平台,支持中英文提示词,可生成高质量、高分辨率的图像。该平台特别针对国…...

告别序列‘拉直’的暴力美学:手把手复现MaIR,体验保持图像局部与连续性的Mamba新玩法
告别序列“拉直”的暴力美学:手把手复现MaIR,体验保持图像局部与连续性的Mamba新玩法 在计算机视觉领域,图像修复任务(如去噪、超分、去模糊)一直是研究热点。传统方法往往将2D图像“拉直”为1D序列进行处理࿰…...

专访越擎科技创始人: 外骨骼的设计与仿真该如何入门
具身智能机器人领域的技术创新如火如荼,从轮式机器人,人形机器人,四足机器狗等不一而足。而从分类来看,外骨骼机器人作为增强人的能力的典型应用,不仅在医疗领域发挥重要作用,在工业应用等场景中也大大的增…...

Otter模型对比学习:提升跨模态表示质量的技术方案
Otter模型对比学习:提升跨模态表示质量的技术方案 【免费下载链接】Otter 🦦 Otter, a multi-modal model based on OpenFlamingo (open-sourced version of DeepMinds Flamingo), trained on MIMIC-IT and showcasing improved instruction-following a…...

NSudo:突破Windows权限壁垒的系统管理利器
NSudo:突破Windows权限壁垒的系统管理利器 【免费下载链接】NSudo [Deprecated, work in progress alternative: https://github.com/M2Team/NanaRun] Series of System Administration Tools 项目地址: https://gitcode.com/gh_mirrors/ns/NSudo 一、核心价…...

GitHub Desktop中文汉化工具:让Git操作变得像聊天一样简单
GitHub Desktop中文汉化工具:让Git操作变得像聊天一样简单 【免费下载链接】GitHubDesktop2Chinese GithubDesktop语言本地化(汉化)工具 项目地址: https://gitcode.com/gh_mirrors/gi/GitHubDesktop2Chinese 还在为GitHub Desktop满屏的英文而头疼吗&#x…...

从数组到哈夫曼树:用Python代码图解软考数据结构核心算法
从数组到哈夫曼树:Python实战软考核心数据结构 1. 线性结构的Python实现 1.1 顺序栈与队列的实现 Python的列表(list)天然适合实现顺序存储结构。我们先来看栈的实现: class ArrayStack:def __init__(self, capacity10):self._items []self._capacity …...

Buildroot构建根文件系统时,为什么你的rootfs.tar总比别人的大?深度解析裁剪技巧
Buildroot构建根文件系统时rootfs.tar体积优化实战指南 当你在嵌入式Linux开发中使用Buildroot构建根文件系统时,是否经常遇到生成的rootfs.tar文件体积过大的问题?本文将深入解析Buildroot的打包机制,揭示那些容易被忽视的体积膨胀陷阱&…...

STM32 GPIO模式实战:开漏输出与推挽输出的5个常见应用场景解析
STM32 GPIO模式实战:开漏输出与推挽输出的5个常见应用场景解析 在嵌入式开发中,GPIO(通用输入输出)是最基础也是最常用的外设之一。STM32系列微控制器提供了多种GPIO模式,其中开漏输出(Open-Drainÿ…...