迭代学习笔记
一、迭代学习定义和分类
1、直观理解
- 迭代学习一般应用于重复性的场景。比如控制一个单自由度的小车以特定的速度曲线移动到指定位置,整个时间是10s,控制频率是0.01,那么整个控制序列就会有1000个点。这1000个点在10s内依次发出,完成依次控制,目的就是让小车的速度或者位置跟踪上特定的曲线。我们有一个优势在于跟踪曲线不变,那么我们可以不断进行尝试,只要获得一组良好的控制序列,那么就可以完成控制。
2、更新率
-
如果我们可以设置一个更新率,根据每一个点面临的误差对控制量进行修改,那么就可以在若干次更新后获得完美的控制序列。
新控制量 = 旧控制量 + 更新率 新控制量 = 旧控制量 + 更新率 新控制量=旧控制量+更新率 -
根据更新率与什么参数有关,可以分为开环、闭环、开闭环。如果跟上一次的误差有关就是开环,如果跟此刻的误差有关就是闭环,如果都有关就是开闭环。根据更新率的结构还可以分为D型、PD型等。
-
需要注意一下有D型和PD型,没有P型,我在仿真中试了半天P型都不收敛。
二、实现例子
- 网上关于迭代学习的代码实现比较少,很多还是用simulink搭的,不方便复现。这里给一个D型闭环迭代学习例子,被控对象是一个钟摆小车,全部代码用python实现,直接运行即可。

1、动力学模型
# 动力学模型函数
def dynamics(state, u):x, theta, dx, dtheta = statedd_x = (u + m2*l*dtheta*dtheta + m2*g*np.sin(theta)*np.cos(theta)) / (m1 + m2*np.sin(theta)*np.sin(theta))dd_theta = (-dd_x*np.cos(theta) + dx*np.sin(theta)*dtheta - np.sin(theta)*(dx*dtheta + g)) / lreturn np.array([dx, dtheta, dd_x, dtheta])
2、四阶龙格库塔积分器和控制器更新率
# 四阶龙格库塔法函数
def RK4(t_start, t_end, fun, Npoints, init_state, u_list, pos_des, spd_des):t = np.linspace(t_start, t_end, Npoints)dt = t[1] - t[0]state = np.zeros((Npoints, len(init_state)))state[0, :] = init_statee = np.zeros((Npoints, 2))for i in range(Npoints-1):u_list[i] = u_list[i] + 1 * (spd_des[i] - state[i, 2]) # 闭环D型更新率u = u_list[i]e[i, 0] = pos_des[i] - state[i, 0]e[i, 1] = spd_des[i] - state[i, 2]k1 = fun(state[i, :], u)k2 = fun(state[i, :] + 0.5 * dt * k1, u)k3 = fun(state[i, :] + 0.5 * dt * k2, u)k4 = fun(state[i, :] + dt * k3, u)state[i + 1, :] = state[i, :] + (1/6) * dt * (k1 + 2 * k2 + 2 * k3 + k4)return state, u_list, e
3、进行迭代
for i in range(10):# 运行RK4state, u_list, e_buff = RK4(t_start, t_end, dynamics, Npoints, [0, 0, 0, 0], u_list, pos_des, spd_des)
4、完整代码和效果展示
import numpy as np
import matplotlib.pyplot as plt
import pandas as pd# 动力学模型函数
def dynamics(state, u):x, theta, dx, dtheta = statedd_x = (u + m2*l*dtheta*dtheta + m2*g*np.sin(theta)*np.cos(theta)) / (m1 + m2*np.sin(theta)*np.sin(theta))dd_theta = (-dd_x*np.cos(theta) + dx*np.sin(theta)*dtheta - np.sin(theta)*(dx*dtheta + g)) / lreturn np.array([dx, dtheta, dd_x, dtheta])# 四阶龙格库塔法函数
def RK4(t_start, t_end, fun, Npoints, init_state, u_list, pos_des, spd_des):t = np.linspace(t_start, t_end, Npoints)dt = t[1] - t[0]state = np.zeros((Npoints, len(init_state)))state[0, :] = init_statee = np.zeros((Npoints, 2))for i in range(Npoints-1):u_list[i] = u_list[i] + 1 * (spd_des[i] - state[i, 2]) # 闭环D型更新率u = u_list[i]e[i, 0] = pos_des[i] - state[i, 0]e[i, 1] = spd_des[i] - state[i, 2]k1 = fun(state[i, :], u)k2 = fun(state[i, :] + 0.5 * dt * k1, u)k3 = fun(state[i, :] + 0.5 * dt * k2, u)k4 = fun(state[i, :] + dt * k3, u)state[i + 1, :] = state[i, :] + (1/6) * dt * (k1 + 2 * k2 + 2 * k3 + k4)return state, u_list, e# 参数设置
m1 = 5
m2 = 1
l = 1
g = 9.8t_start = 0
t_end = 10
Npoints = 10000
t = np.linspace(t_start, t_end, Npoints)# 期望位置和速度
pos_des = np.sin(t) + t
spd_des = np.cos(t) + 1pos_des = t * t + 2 * t
spd_des = 2 * t + 2# 初始状态和控制输入
u_list = [0] * 10000# 创建图形对象
plt.figure(figsize=(12, 12))for i in range(20):# 运行RK4state, u_list, e_buff = RK4(t_start, t_end, dynamics, Npoints, [0, 0, 0, 0], u_list, pos_des, spd_des)# 清除当前图像plt.clf()# 绘制实际位置和期望位置的对比图plt.subplot(3, 1, 1)plt.plot(t, state[:, 0], label='Actual x (position)')plt.plot(t, pos_des, label='Desired x (position)', linestyle='--')plt.xlabel('Time (s)')plt.ylabel('Position')plt.legend()plt.title(f'Iteration {i+1}')# 绘制实际速度和期望速度的对比图plt.subplot(3, 1, 2)plt.plot(t, state[:, 2], label='Actual dx (velocity)')plt.plot(t, spd_des, label='Desired dx (velocity)', linestyle='--')plt.xlabel('Time (s)')plt.ylabel('Velocity')plt.legend()# 绘制控制输入(力)曲线plt.subplot(3, 1, 3)plt.plot(t, u_list, label='Control input (force)')plt.xlabel('Time (s)')plt.ylabel('Force')plt.legend()# 显示图像plt.pause(0.01)# 最后显示图像
plt.show()# 将误差和力存储到CSV文件
data = np.hstack((e_buff, np.array(u_list).reshape(-1, 1)))
df = pd.DataFrame(data, columns=['Position Error', 'Velocity Error', 'Control Input'])
df.to_csv('error_and_force_data.csv', index=False)
5、实物效果
-
这个曲线不是上面仿真小车钟摆的实物测试,而是一个有一定质量的物体yaw轴回转的控制效果,展示的是位置曲线。这个物体受到不小的摩擦力,所以在开始迭代时开始和后来都会有停止不动的情况出现。同时,摩擦力也导致这个物体受到很大的干扰,就像小车钟摆的重物一样。
-
值得一提的是整个实物的算法测试过程非常顺利,在代码完成后,一次测试就成功了。使用的还是闭环D型迭代学习,经过三四次迭代就收敛到期望曲线附近了。这说明迭代学习还是一种很实用的算法。

相关文章:
迭代学习笔记
一、迭代学习定义和分类 1、直观理解 迭代学习一般应用于重复性的场景。比如控制一个单自由度的小车以特定的速度曲线移动到指定位置,整个时间是10s,控制频率是0.01,那么整个控制序列就会有1000个点。这1000个点在10s内依次发出,…...

【安全】系统安全设计规范(DOC完整版)
1.1安全建设原则 1.2 安全管理体系 1.3 安全管理规范 1.4 数据安全保障措施 1.4.1 数据库安全保障 1.4.2 操作系统安全保障 1.4.3 病毒防治 1.5安全保障措施 1.5.1实名认证保障 1.5.2 接口安全保障 1.5.3 加密传输保障 1.5.4终端安全保障 软件资料清单列表部分文档&…...
windows常用命令整理
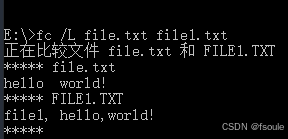
本文分享一些常用的windows命令。根据功能的不同,大致可分为以下几个方面,一是文件操作命令,二是进程相关命令,三是磁盘相关命令,四是网络相关命令,五是其他命令。 1.文件操作命令 dir:显示当…...

视频处理基础知识1
1、图像基本知识 图像的组成:像素、RGB(每个像素由三个发光二极管组成)、分辨率(横纵向像素的个数乘积) PPI每英寸的像素数 DPI每英寸的点数,有可能一个点有多个像素 PPI>300 就属于视网膜级别,就是很清晰&#…...

Linux退不出vim编辑模式
目录 第一章、问题分析1.1)报错提示 第二章、解决方式 友情提醒: 先看文章目录,大致了解文章知识点结构,点击文章目录可直接跳转到文章指定位置。 第一章、问题分析 1.1)报错提示 报错如下:使用Linux的vi…...

TikTok养号的网络环境及相关代理IP知识
TikTok作为一个流行的短视频分享平台,其用户量非常庞大,很多商家和个人都会使用TikTok来进行引流和推广。由于TikTok的规则和政策限制了每个用户每天发布视频的数量,因此许多用户会使用多个账号来发布更多的视频以提高曝光率。 然而ÿ…...

过程调用和数组的分配访问
系列文章 : 深入理解计算机系统笔记 文章目录 系列文章3.7 过程3.7.1 运行时栈3.7.2 转移控制3.7.3 数据传送3.7.4 栈上的局部存储3.7.5 寄存器中的局部存储空间3.7.6 递归过程 3.8 数组分配和访问3.8.1 基本原则3.8.2 指针运算3.8.3 嵌套的数组3.8.4 定长数组3.8.5 变长数组…...

TeamViewer手机端APP提示:请先验证账户
当你在手机端下载安装了TeamViewerAPP后,需要你先登录个人账号,然后还会要求你验证账户,同时跳转到一个网址中,但是这个网址并没有自动跳转到验证账户的位置。 解决办法: 在手机浏览器中进入下面这个网址:…...

【SpringBoot】分页查询
1. Controller ApiOperation("分页查询")GetMapping("/page")public Result<PageResult> pageResultResult(EmployeePageQueryDTO employeePageQueryDTO) {System.out.println(employeePageQueryDTO.toString());PageResult pageResult employeeSer…...
微软CrowdStrike驱动蓝屏以及内核签名
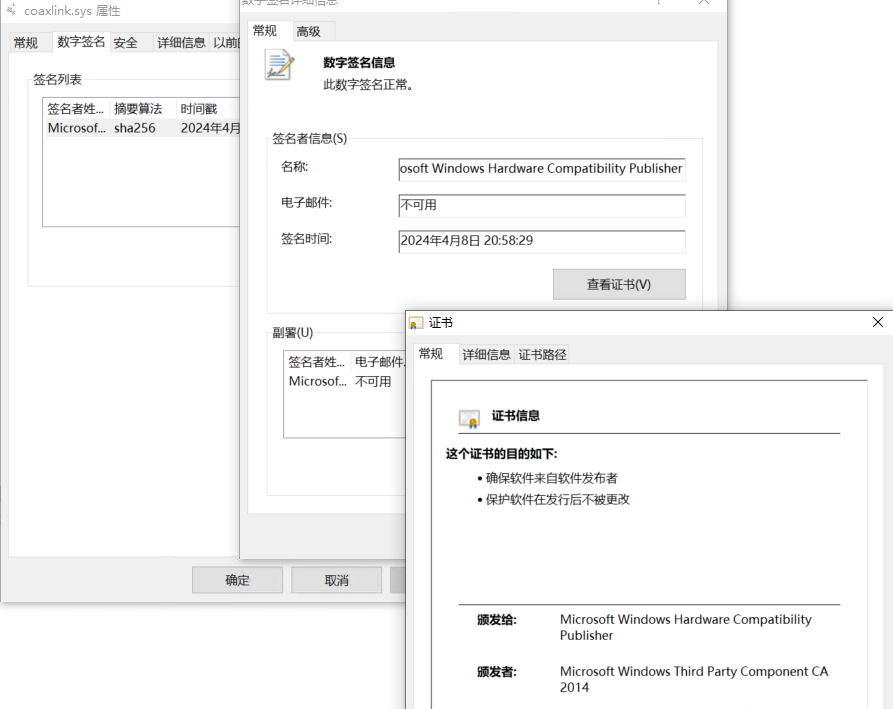
原因 当Windows操作系统遇到严重错误导致系统崩溃时,屏幕显示为蓝色,通常伴有错误代码和信息,这被称为“蓝屏死机”(Blue Screen of Death,简称BSOD) https://www.thepaper.cn/newsDetail_forward_281262…...
Spring中Bean的循环依赖
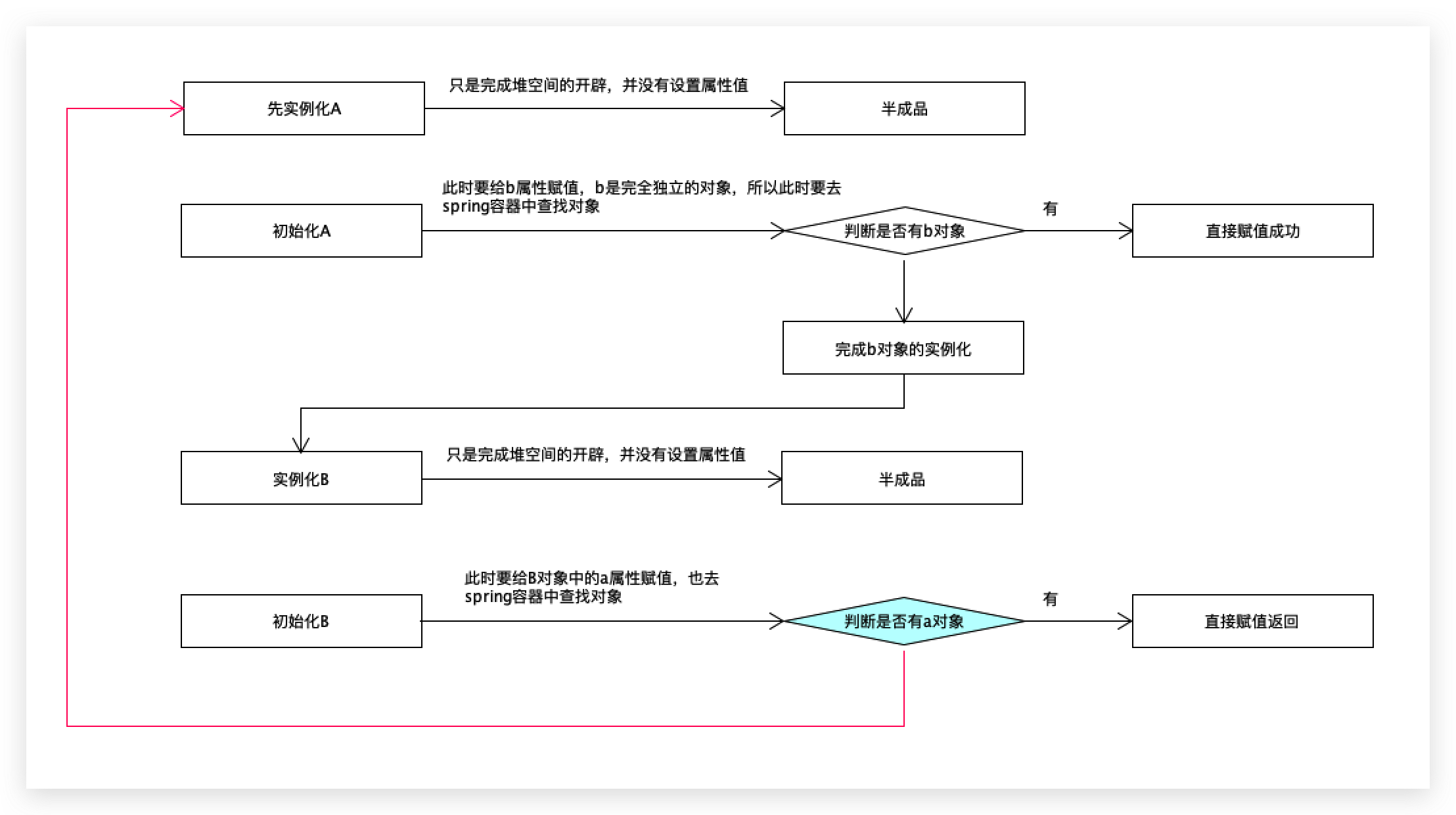
目录 定义: 循环依赖的后果: 一:三级缓存 1、大概的思路: 注意: 2、执行过程: A半完成: B完成: A完成: 注: 二:Lazy 定义: …...

Java二十三种设计模式-代理模式模式(8/23)
代理模式:为对象访问提供灵活的控制 引言 代理模式(Proxy Pattern)是一种结构型设计模式,它为其他对象提供一个代替或占位符,以控制对它的访问。 基础知识,java设计模式总体来说设计模式分为三大类&#…...

Windows 11 家庭中文版 安装 VMWare 报 安装程序检测到主机启用了Hyper-V或Device
1、问题 我的操作系统信息如下: 我在安装 VMWare 的时候,报: 因为我之前安装了 docker 桌面版,所以才报这个提示。 安装程序检测到主机启用了 Hyper-v或 Device/credential Guard。要在启用了Hyper-或 Device/Credential Guard …...

机械学习—零基础学习日志(高数09——函数图形)
零基础为了学人工智能,真的开始复习高数 函数图像,开始新的学习! 幂函数 利用函数的性质,以幂函数为例,因为单调性相同,利用图中的2和3公式,求最值问题,可以直接将式子进行简化。这…...

java迭代集合出现并发修改异常(ConcurrentModificationException)的原因以及解决方案
java迭代集合出现并发修改异常(ConcurrentModificationException)的原因以及解决方案 一. 什么时候会出现并发修改异常? 这里先看需求 : 定义一个集合,存储 唐僧,孙悟空,猪八戒,沙僧,遍历集合,如果遍历到猪八戒,往集合中添加一个白龙马 很显然要求我们先创建一个集合并进行…...

BGP选路之Local Preference
原理概述 当一台BGP路由器中存在多条去往同一目标网络的BGP路由时,BGP协议会对这些BGP路由的属性进行比较,以确定去往该目标网络的最优BGP路由。BGP首先比较的是路由信息的首选值(PrefVal),如果 PrefVal相同,就会比较本…...

WEB渗透信息收集篇--IP和端口信息
WEB渗透信息收集篇--域名信息-CSDN博客 WEB渗透信息收集篇--网站架构和指纹识别-CSDN博客 WEB渗透信息收集篇--人员信息-CSDN博客 WEB渗透信息收集篇--其他信息-CSDN博客 一、ASN ASN Tool - MxToolBox ASN通常指的是"自…...

国内微短剧系统平台抖音微信付费小程序app开发源代码交付
微短剧作为当下热门的内容,结合抖音平台的广泛用户基础,开发微短剧付费小程序APP具有显著的市场潜力,用户对于短剧内容的需求旺盛,特别是在言情、总裁、赘婿等热门题材方面,接下来给大家普及一下微短剧小程序系统。 顺…...

Java语言程序设计基础篇_编程练习题**15.19 (游戏:手眼协调)
**15.19 (游戏:手眼协调) 请编写一个程序,显示一个半径为10像素的实心圆,该圆放置在面板上的随机位置,并填充随机的顔色,如图15-29b所示。单击这个圆时,它会消失,然后在另一个随机的位置显示新的随机颜色的…...

学习记录day16—— 数据结构 双向链表 循环链表
双向链表 1、概念 1)就是从任意一个节点既能存储其前驱节点,又能存储后继节点 2)结构体中增加一个指向前驱节点的指针 //定义数据类型 typedef int datatype;//定义节点类型 typedef struct Node {union {int len;datatype data;};struct Node *prio; …...

身份证OCR识别接口接入实战:Python/Java/PHP/C#四语言代码示例与踩坑指南
#身份证OCR, #OCR接口, #API接入, #Python示例, #Java示例, #PHP示例, #踩坑指南, #石榴智能, #实名认证, #图片识别 身份证OCR识别接口接入实战:Python/Java/PHP/C#四语言代码示例与踩坑指南 作者:石榴智能技术团队 一、前言 身份证OCR识别已经不是什…...

别再死记硬背了!用Multisim仿真+图解,5分钟搞懂三极管共射放大电路工作原理
用Multisim仿真图解5分钟掌握三极管共射放大电路三极管共射放大电路是电子技术中最基础也最关键的电路之一,但传统教材中复杂的公式推导和静态图解往往让初学者望而生畏。本文将带你用Multisim仿真软件,通过可视化的方式直观理解电路工作原理,…...

物理引导的机器学习工作流:气候建模的融合创新与实践
1. 项目概述:当气候建模遇见机器学习如果你像我一样,在气候模拟这个领域摸爬滚打超过十年,就会深刻体会到一种“甜蜜的负担”:我们构建的地球系统模型(ESM)越来越精细,物理过程越来越复杂&#…...

告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境
告别虚拟机卡顿:在Windows 11的WSL2里搞定Lichee Nano交叉编译环境 对于嵌入式开发者来说,配置开发环境往往是个令人头疼的问题。传统虚拟机方案虽然能提供完整的Linux体验,但资源占用高、启动慢、与宿主系统交互不便等问题一直困扰着开发者。…...

除了排错,你可能不知道OPC Expert v8.1还能做这些:数据归档、计算与冗余实战
解锁OPC Expert v8.1的隐藏潜力:数据归档、实时计算与冗余架构实战指南在工业自动化领域,OPC Expert常被视为故障排查的"急救箱",但它的能力远不止于此。当大多数工程师还在用它解决DCOM配置问题时,少数先行者已经用它重…...

Vue2-Verify:解决前端验证码安全性与用户体验平衡问题的技术方案实现
Vue2-Verify:解决前端验证码安全性与用户体验平衡问题的技术方案实现 【免费下载链接】vue2-verify vue的验证码插件 项目地址: https://gitcode.com/gh_mirrors/vu/vue2-verify 在当今Web应用开发中,验证码作为防止自动化攻击的关键安全组件&…...
)
为什么你的DeepSeek微调loss震荡不止?(Meta/DeepSeek联合团队未公开的梯度裁剪+LoRA初始化双校准协议)
更多请点击: https://codechina.net 第一章:DeepSeek微调loss震荡的根本归因剖析 DeepSeek系列模型在微调过程中频繁出现loss剧烈震荡现象,其本质并非单一因素所致,而是数据、优化器、梯度动态与模型结构四者耦合失稳的系统性表现…...

多模型聚合平台如何助力网站AIB测试与选型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 多模型聚合平台如何助力网站AIB测试与选型 对于网站产品经理而言,首页文案的生成质量直接影响用户的第一印象和转化率。…...

3个步骤彻底解决WSA安装失败问题:从错误代码到完美运行
3个步骤彻底解决WSA安装失败问题:从错误代码到完美运行 【免费下载链接】WSABuilds Run Windows Subsystem For Android on your Windows 10 and Windows 11 PC using prebuilt binaries with Google Play Store (MindTheGapps) and/or Magisk or KernelSU (root so…...

通过Taotoken标准OpenAI协议实现分钟级集成现有代码
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 通过Taotoken标准OpenAI协议实现分钟级集成现有代码 1. 迁移背景与核心思路 许多开发团队在构建AI应用时,会直接使用O…...