STM32 (十五)MPU6050
简介
前言
一、MPU6050简介
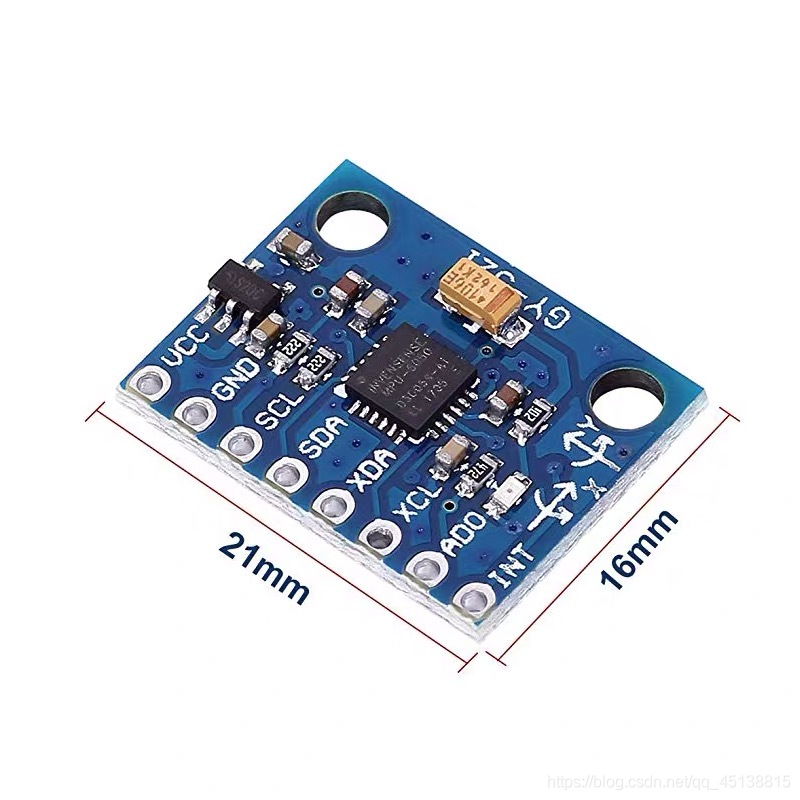
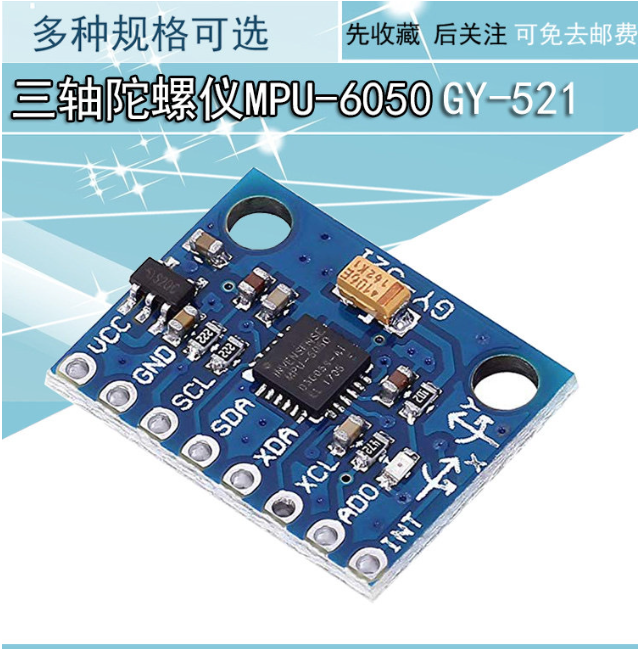
MPU6050是一款性价比很高的陀螺仪,可以读取X Y Z 三轴角度,X Y Z 三轴加速度,还有内置的温度传感器,在姿态解析方面应用非常广泛。
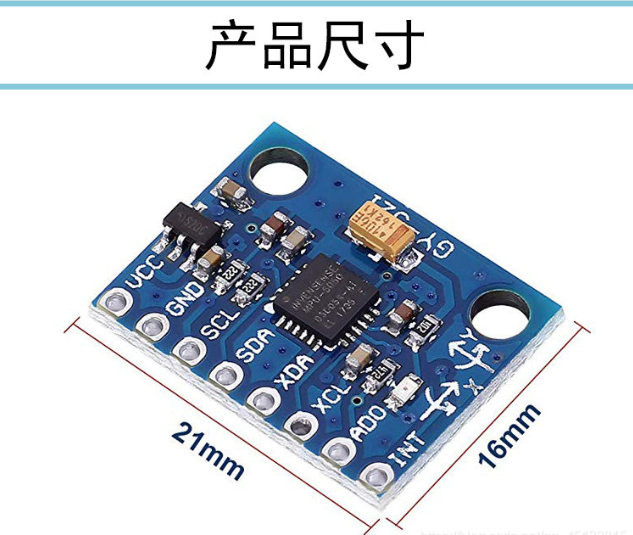
下面是它在淘宝上的参数图
产品尺寸
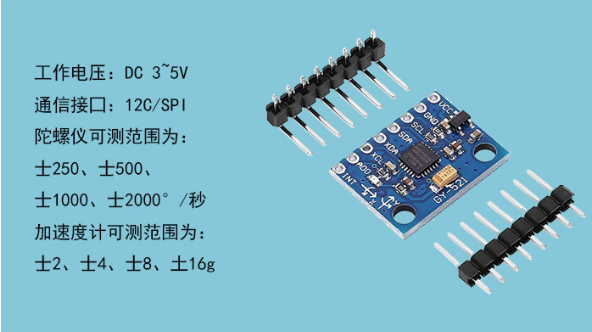
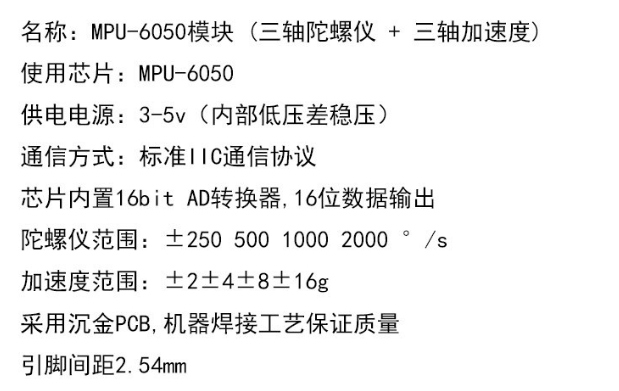
产品参数
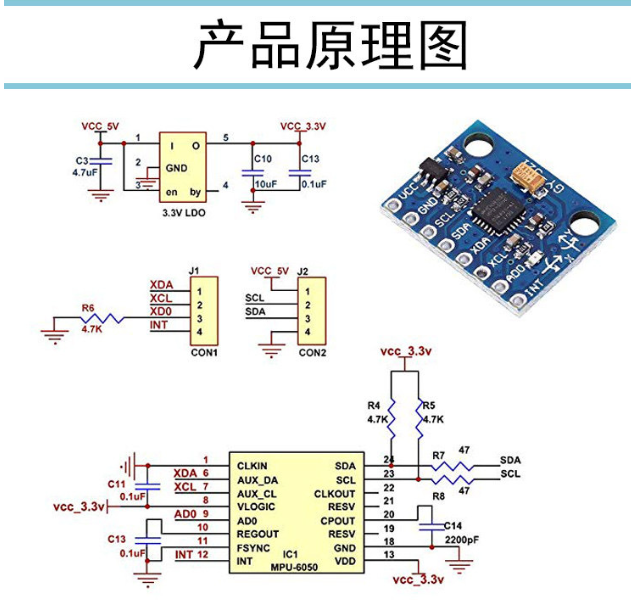
产品原理图:
二、硬件连接
由于采用IIC通信,最基本的只需要采用四根线就可以了。分别VCC,GND,SCL,SDA连接到单片机
SCL-----PB6
SDA-----PB7
GND-----GND
VCC接3V或者5V都行。
三、工作原理
MPU6050内部整合了三轴MEMS陀螺仪、三轴MEMS加速度计以及一个可扩展的数字运动处理器DMP(Digital Motion Processor),而且还可以连接一个第三方数字传感器(如磁力计),这样的话,就可以通过IIC接口输出一个9轴信号(链接第三方数字传感器才可以输出九轴信号,否则只有六轴信号)。
更加方便的是,有了DMP,可以结合InvenSense公司提供的运动处理资料库,实现姿态解算。通过自带的DMP,可以通过IIC接口输出9轴融合演算的数据,大大降低了运动处理运算对操作系统的负荷,同时也降低了开发难度。其实,简单一句话说,陀螺仪就是测角速度的,加速度传感器就是测角加速度的,二者数据通过算法就可以得到PITCH、YAW、ROLL角了。
特点:
以数字形式输出 6 轴或 9 轴(需外接磁传感器)的旋转矩阵、四元数(quaternion)、欧拉角格式(Euler Angle forma)的融合演算数据(需 DMP 支持)
具有 131 LSBs/° /sec 敏感度与全格感测范围为±250、±500、±1000 与±2000° /sec的 3 轴角速度感测器(陀螺仪)
集成可程序控制,范围为±2g、±4g、±8g 和±16g 的 3 轴加速度传感器
移除加速器与陀螺仪轴间敏感度,降低设定给予的影响与感测器的飘移
自带数字运动处理(DMP: Digital Motion Processing)引擎可减少 MCU 复杂的融合演算数据、感测器同步化、姿势感应等的负荷
内建运作时间偏差与磁力感测器校正演算技术,免除了客户须另外进行校正的需求
自带一个数字温度传感器
带数字输入同步引脚(Sync pin)支持视频电子影相稳定技术与 GPS
可程序控制的中断(interrupt),支持姿势识别、摇摄、画面放大缩小、滚动、快速下降中断、 high-G 中断、零动作感应、触击感应、摇动感应功能
VDD 供电电压为 2.5V±5%、 3.0V±5%、 3.3V±5%; VLOGIC 可低至 1.8V± 5%
陀螺仪工作电流: 5mA,陀螺仪待机电流: 5uA; 加速器工作电流:500uA,加速器省电模式电流: 40uA@10Hz
自带 1024 字节 FIFO,有助于降低系统功耗
高达 400Khz 的 IIC 通信接口
超小封装尺寸: 4x4x0.9mm(QFN)
MPU6050三轴角(姿态角)
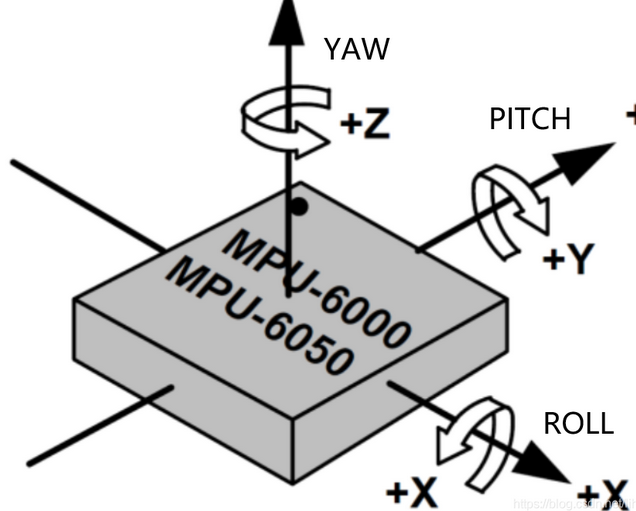
绕向即为正方向,可根据右手螺旋定则确定方向。
MPU6050框图:
在这里插入图片描述可以很清晰地观察到,MPU6050芯片中内置了三轴加速度传感器、三轴陀螺仪和一个温度传感器。右侧INT为中断输出脚,TCS为片选脚、AD0为设置地址脚、SCL和SDA为主IIC接口、AUX_CL和AUX_DA为从IIC接口,主要用到的是AD0、SCL、SDA。
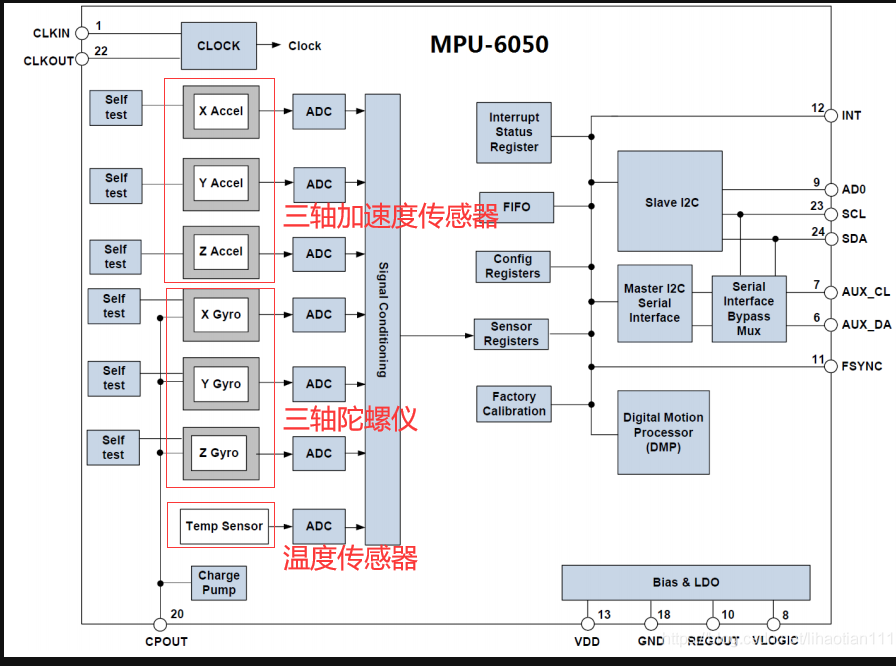
可以很清晰地观察到,MPU6050芯片中内置了三轴加速度传感器、三轴陀螺仪和一个温度传感器。右侧INT为中断输出脚,TCS为片选脚、AD0为设置地址脚、SCL和SDA为主IIC接口、AUX_CL和AUX_DA为从IIC接口,主要用到的是AD0、SCL、SDA。
相关寄存器
这部分就比较多了,不想看的也可以直接跳过,一样可以使用,想深入了解的朋友可以看一下。
1、电源管理寄存器

DEVICE_RESE=1,复位MPU6050,复位完成后,自动清零。SLEEP=1,进入睡眠模式;SLEEP=0,正常工作模式。TEMP_DIS,用于设置是否使能温度传感器,设置为0,则使能CLKSEL[2:0],用于选择系统时钟源,如下所示:

总之,电源管理寄存器就是复位MPU6050

该寄存器的LP_WAKE_CTRL用于控制低功耗时的唤醒频率,用不到。剩下的6位,分别控制加速度和陀螺仪的x/y/z轴是否进入待机模式,这里我们全部都不进入待机模式,所以全部设置为:0 ,即可。
总之,电源管理寄存器2就是用于设置加速度传感器和陀螺仪的X/Y/Z轴是进入休眠还是正常工作。
2、陀螺仪配置寄存器

该寄存器我们只关心FS_SEL[1:0]这两个位,用于设置陀螺仪的满量程范围:0,±250°/s;1,±500°/s;2,±1000°/s;3,±2000°/s;我们一般设置为3,即±2000°/S,因为陀螺仪的ADC为16位分辨率,所以得到灵敏度为:65536/4000=16.4LSB/(°/S)。
总之,陀螺仪配置寄存器就是配置陀螺仪满量程范围,设置最大
3、加速度配置寄存器

该寄存器我们只关心AFS_SEL[1:0]这两个位,用于设置加速度传感器的满量程范围:0,±2g;1,±4g;2,±8g;3,±16g;我们一般设置为0,即±2g,因为加速度传感器的ADC也是16位,所以得到灵敏度为:65536/4=16384LSB/g。
总之,加速度传感器配置寄存器就是配置加速度传感器满量程范围,不宜过大
4、FIFO使能寄存器

该寄存器用于控制FIFO使能,在简单读取传感器数据的时候,可以不用FIFO,设置对应位为:0,即可禁止FIFO,设置为1,则使能FIFO。加速度传感器的三个轴,全由一个位(ACCEL_FIFO_EN)控制,只要该位为1,则加速度传感器三个通道都开启FIFO;但是陀螺仪传感器的三个轴需要一个一个设置,即XYZ轴分别配置。
总之,FIFO使能寄存器用于控制使能FIFO(First Input First Output)
5、陀螺仪采样率分频寄存器

该寄存器用于设置MPU6050的陀螺仪采样频率,计算公式为:采样频率 = 陀螺仪输出频率 / (1+SMPLRT_DIV)。这里陀螺仪的输出频率,是1Khz或者8Khz,与数字低通滤波器(DLPF)的设置有关,当DLPF_CFG=0或7的时候,频率为8Khz,其他情况是1Khz。而且DLPF滤波频率一般设置为采样率的一半。采样率,我们假定设置为50Hz,那么:SMPLRT_DIV=1000/50-1=19。
总之,陀螺仪采样率分频寄存器就是用于设置陀螺仪的采样频率,如果采样频率为50Hz,那么采样周期就为1/50=20ms,即20ms采集一次陀螺仪的数据。
6、配置寄存器
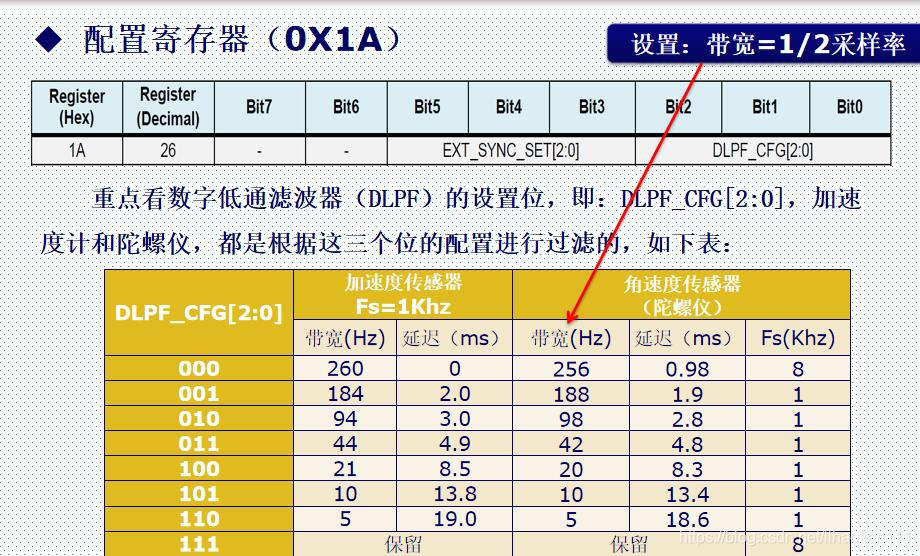
总之,配置寄存器就是设置数字低通滤波器的DLPF_CFG位来结合陀螺仪采样分频寄存器来共同设置采样周期。
7、陀螺仪数据输出寄存器

陀螺仪数据输出寄存器总共由6个寄存器组成,输出X/Y/Z三个轴的陀螺仪传感器数据,高字节在前,低字节在后。
总之,陀螺仪数据输出寄存器就是把陀螺仪测量到的数据输出出来。
8、加速度传感器数据输出寄存器
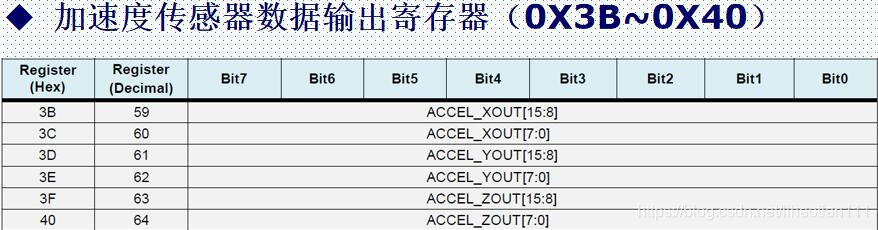
加速度传感器数据输出寄存器总共由6个寄存器组成,输出X/Y/Z三个轴的加速度传感器值,高字节在前,低字节在后。
总之,加速度传感器数据输出寄存器就是把加速度传感器测量到的数据输出出来。
9、温度传感器数据输出寄存器

通过读取0X41(高8位)和0X42(低8位)寄存器得到,温度换算公式为:
Temperature = 36.53 + regval/340。其中,Temperature为计算得到的温度值,单位为℃,regval为从0X41和0X42读到的温度传感器值。
总之,温度传感器数据输出寄存器就是把温度寄存器测量到的数据处处出来。
工程创建
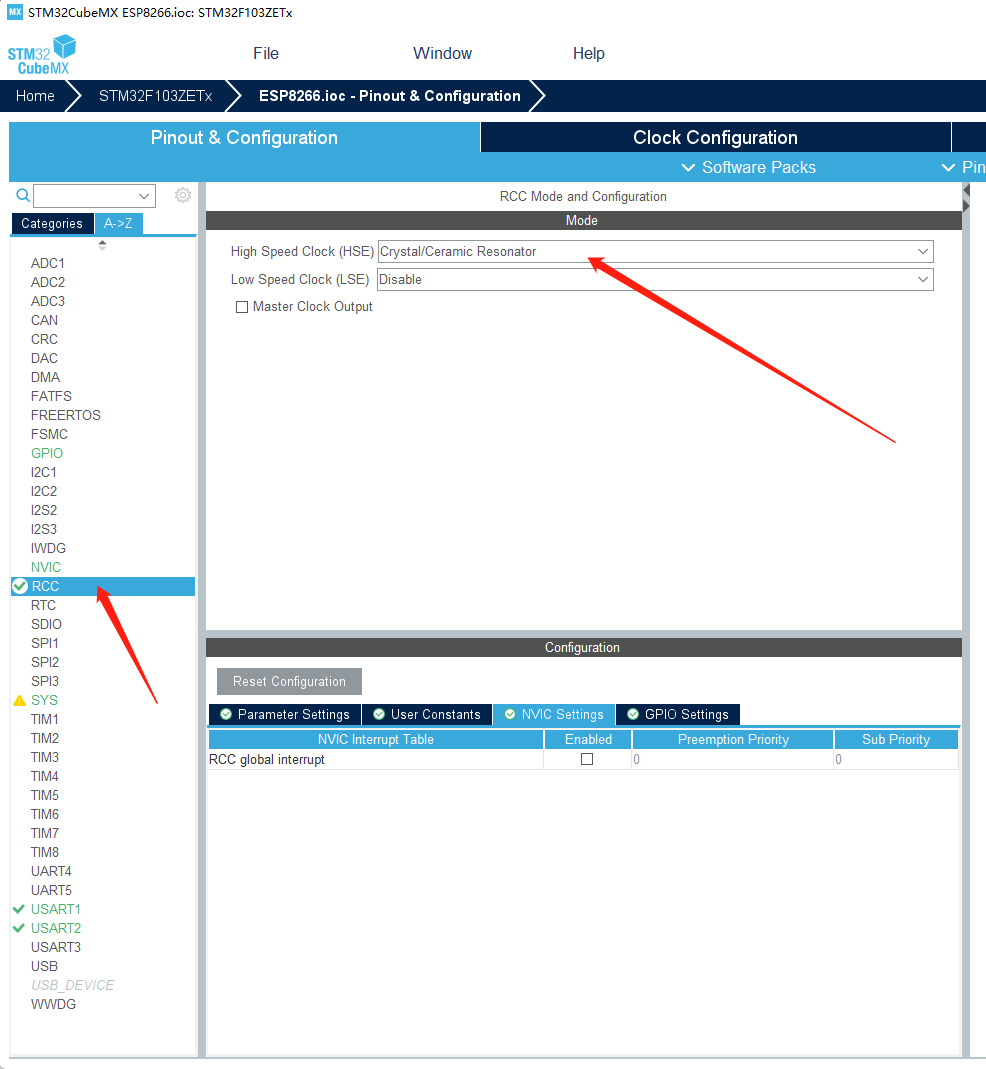
总配置如下

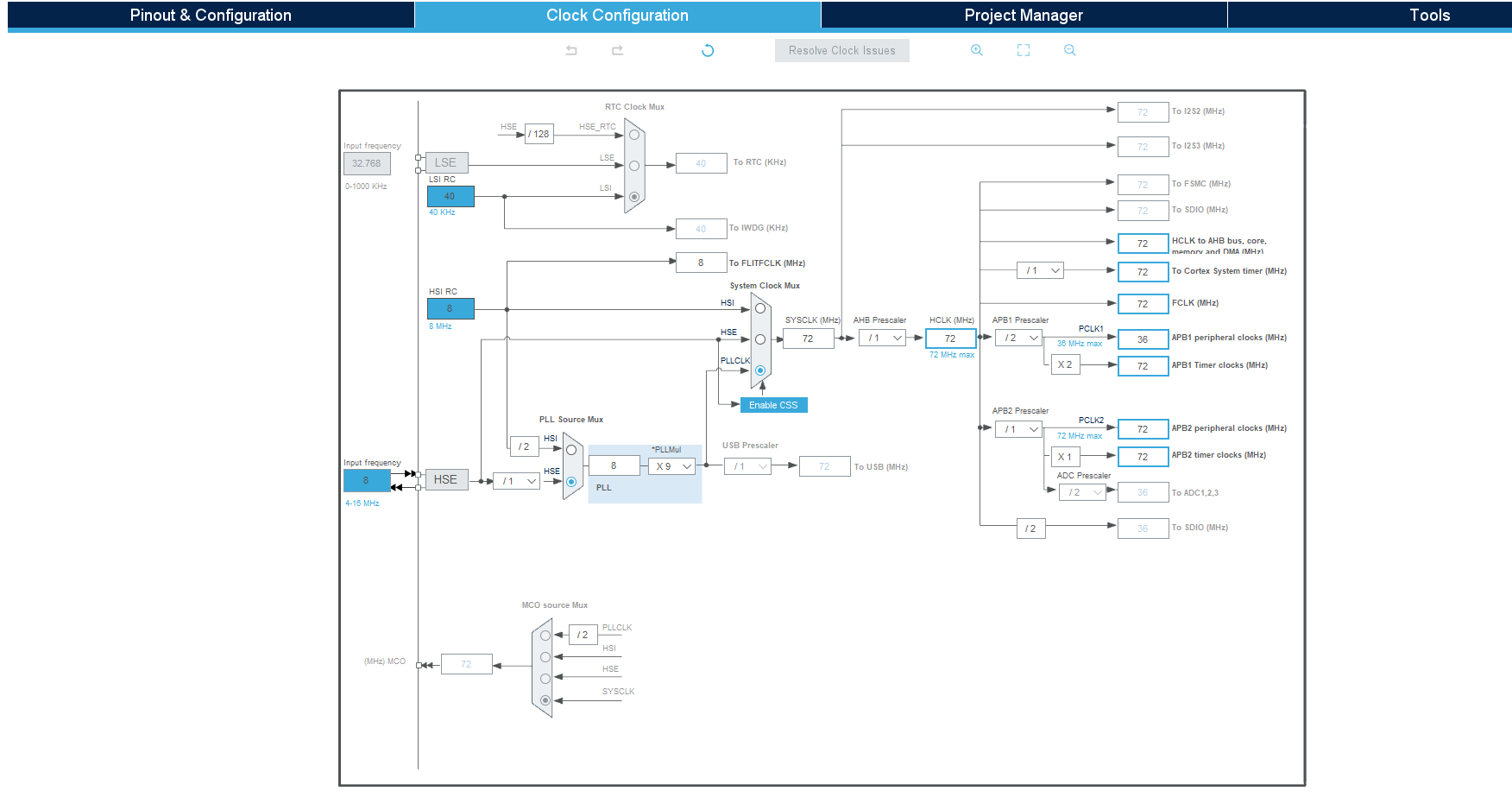
1 高速时钟选择外部8Mhz的晶振
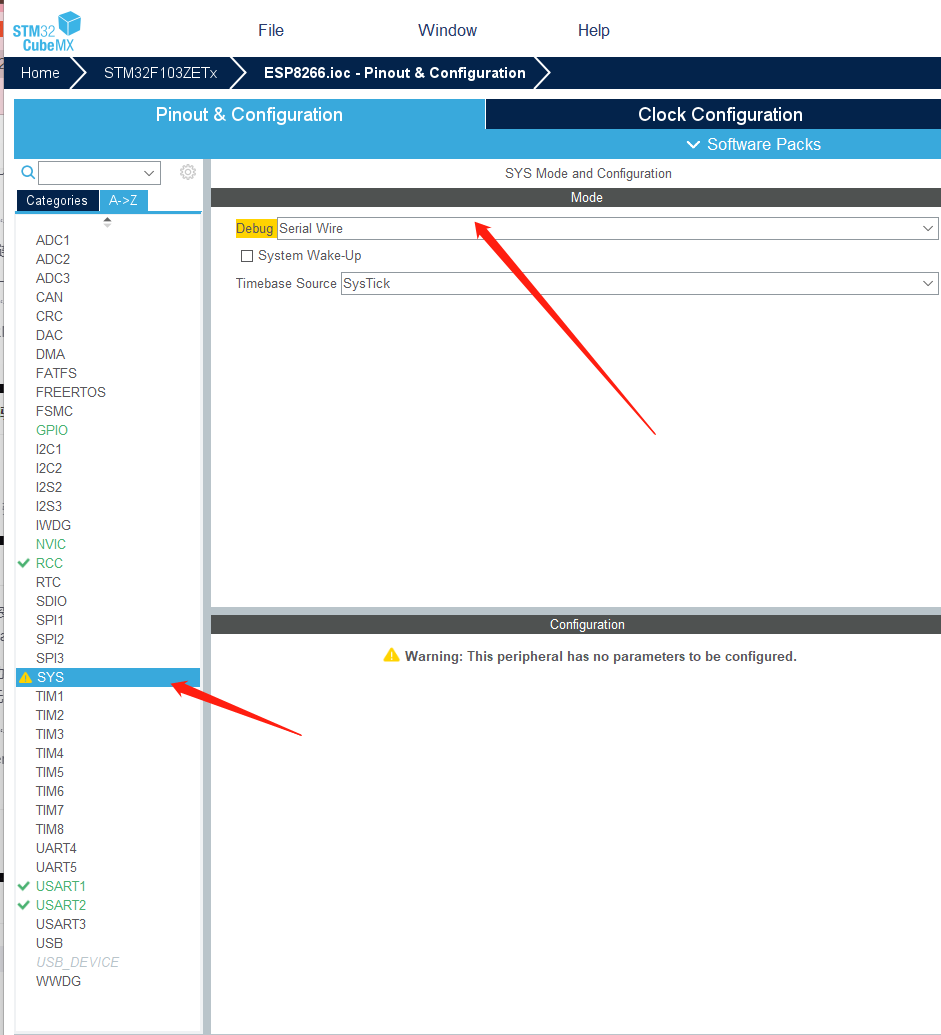
2 开启debug调试功能
3 时钟树
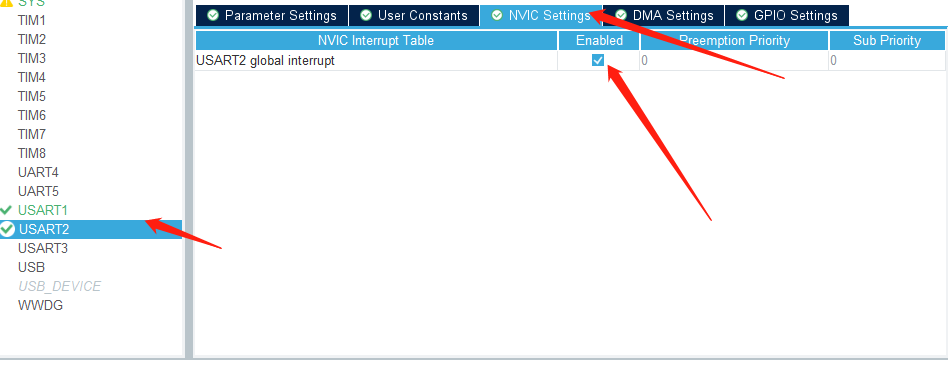
4 打开串口设置
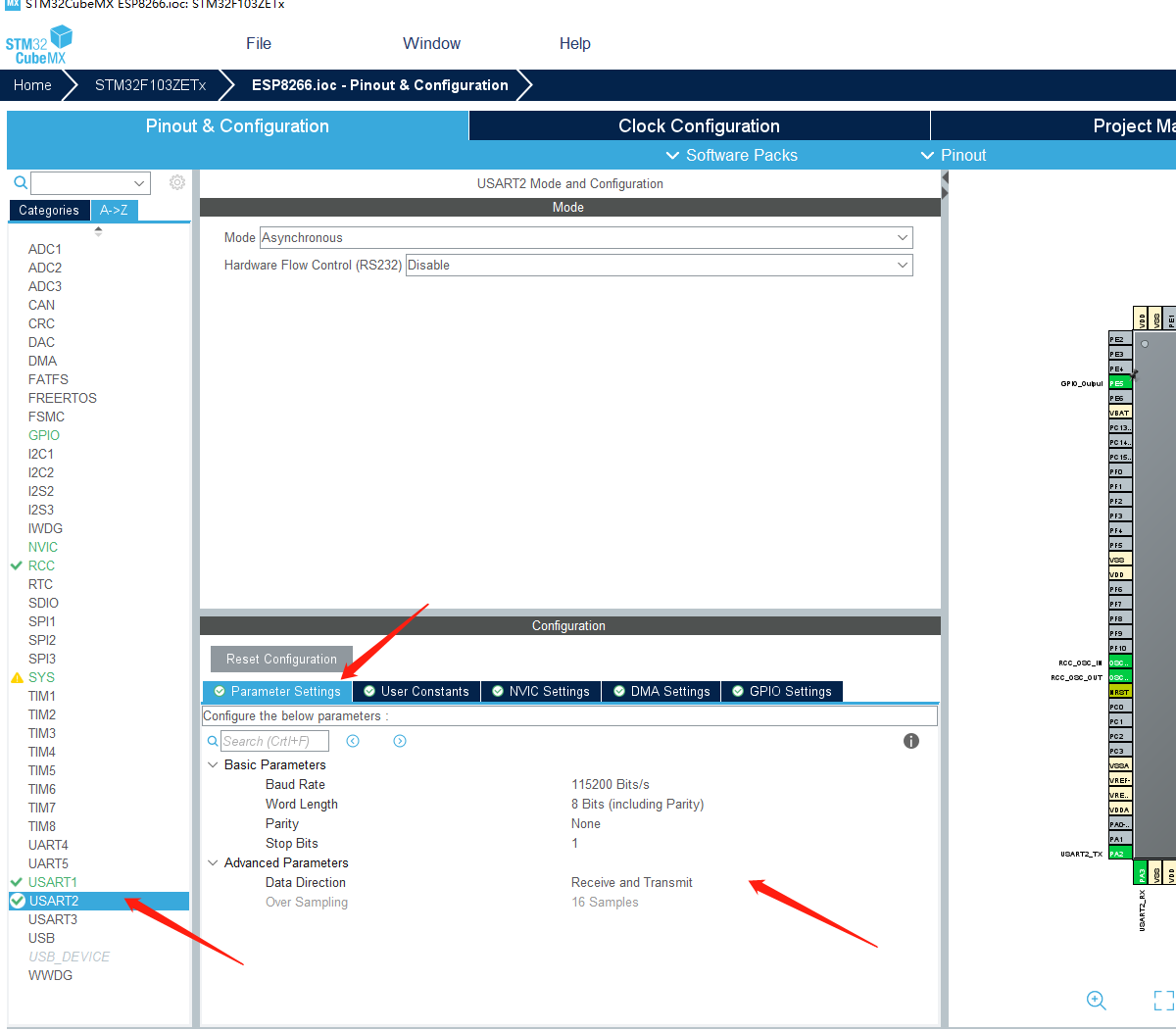
5 并且使能串口中断
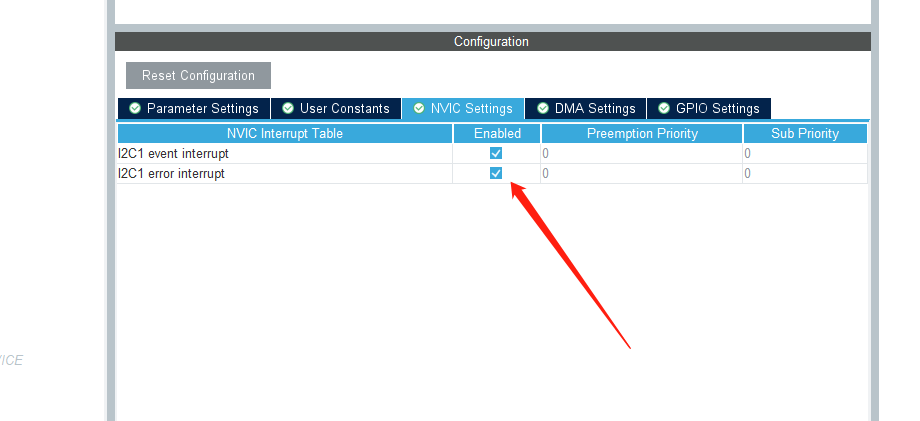
6 打开IIC设置
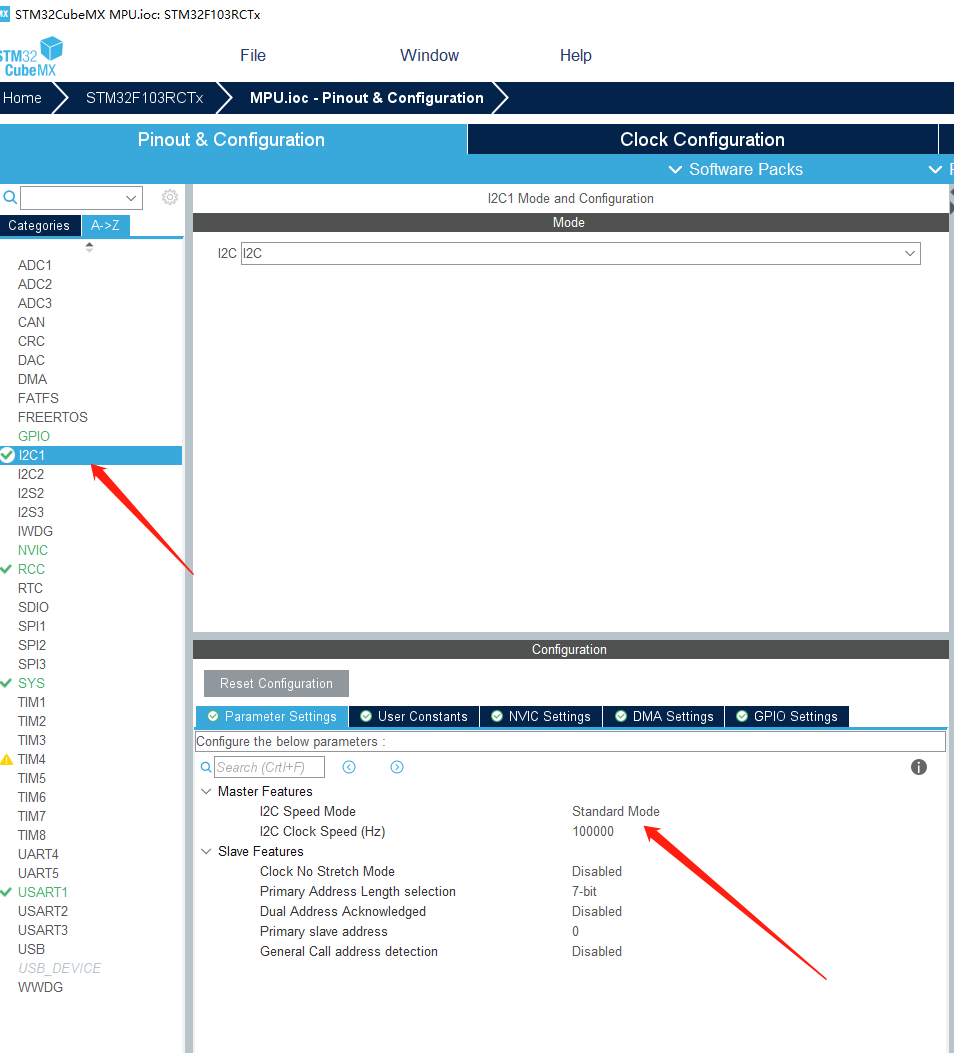
7 打开IIC中断
代码讲解
代码重点是讲解我们的dmp库的移植:
一、首先我们要先去移植DMP的几个文件,这几个文件网上都可以找了,但是为了方便你们,我也就放在这里了。
https://download.csdn.net/download/DOF526570/87588566
里面打开是这样的一个文件
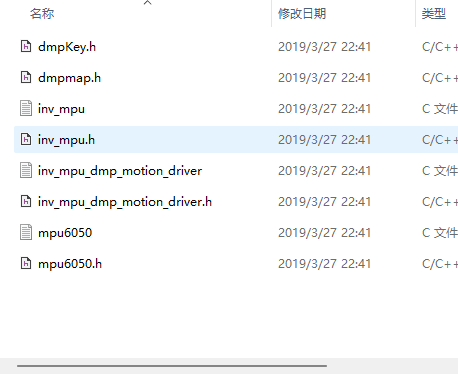
把里面的.c和.h文件分别放在对应的Src和Inc里面就好了
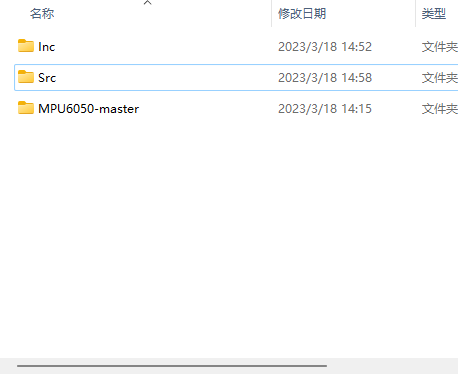
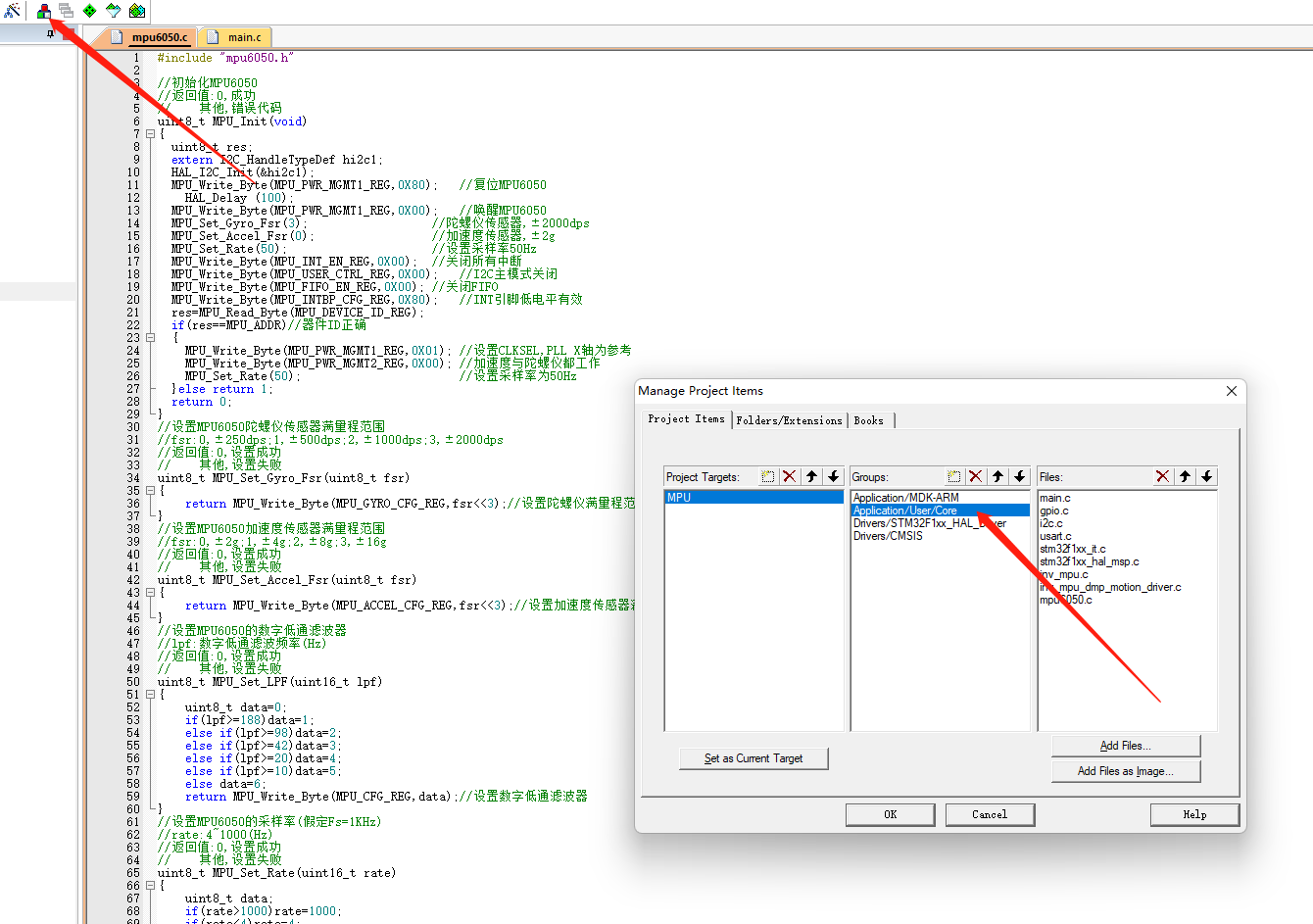
然后去工程里面记得添加一下文件就好了,也不用去添加路径了。
接下来讲解一下主函数的示例代码:
首先是我们的日常,重写一下我们的串口打印函数:
/*** 函数功能: 重定向c库函数printf到DEBUG_USARTx* 输入参数: 无* 返 回 值: 无* 说 明:无*/
int fputc(int ch, FILE *f)
{HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);return ch;
}/*** 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx* 输入参数: 无* 返 回 值: 无* 说 明:无*/
int fgetc(FILE *f)
{uint8_t ch = 0;HAL_UART_Receive(&huart1, &ch, 1, 0xffff);return ch;
}然后添加变量来获取mpu6050返回的信息:
float pitch,roll,yaw; //欧拉角
short aacx,aacy,aacz; //加速度传感器原始数据
short gyrox,gyroy,gyroz; //陀螺仪原始数据
short temp; //温度接下来是初始化一下我们的MPU6050还有dmp库
while(MPU_Init()); //初始化MPU6050printf("%s\r\n","Mpu6050 Init ok!");while(mpu_dmp_init()){HAL_Delay(200);printf("%s\r\n","Mpu6050 Init Wrong!");}printf("%s\r\n","Mpu6050 Init OK!");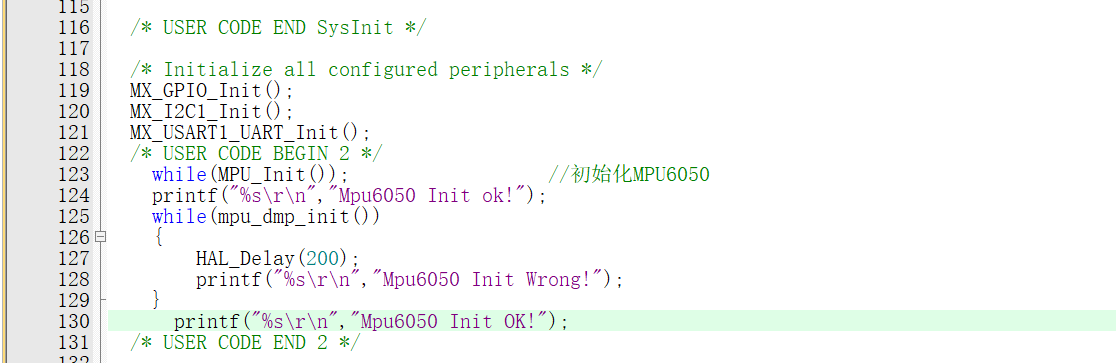
最后在我们主函数的while里面打印出来获取的数量,这里为了我们方便看到变化,我就延时就了一点:
while (1){/* USER CODE END WHILE */if(mpu_dmp_get_data(&pitch,&roll,&yaw)==0){temp=MPU_Get_Temperature(); //得到温度值MPU_Get_Accelerometer(&aacx,&aacy,&aacz); //得到加速度传感器数据MPU_Get_Gyroscope(&gyrox,&gyroy,&gyroz); //得到陀螺仪数据printf("三轴角度:%f-%f-%f\r\n",pitch,roll,yaw);printf("三轴加速度:%d-%d-%d\r\n",aacx,aacy,aacz);printf("三轴角角度:%d-%d-%d\r\n",gyrox,gyroy,gyroz);}HAL_Delay(1000);/* USER CODE BEGIN 3 */}到这里就基本搞定了。
串口助手显示如下:

相关文章:
STM32 (十五)MPU6050
简介前言一、MPU6050简介MPU6050是一款性价比很高的陀螺仪,可以读取X Y Z 三轴角度,X Y Z 三轴加速度,还有内置的温度传感器,在姿态解析方面应用非常广泛。下面是它在淘宝上的参数图产品尺寸产品参数产品原理图:二、硬…...

使用yarn,依赖报各种错误怎么办
使用 yarn^3.x 版本时,默认并不会安装包到 node_modules,因为 yarn3.x 是即插即用的,也就是说如果你下载过这个包,yarn只会生成一个 Png文件,然后将包的路径 link 到下载过的地方,这样可以省去很多时间。而…...

面试官:rem和vw有什么区别
"rem" 和 "vw"的区别 "rem" 和 "vw" 都是用于网页设计的CSS单位。 "rem" 是相对于根元素的字体大小来计算的单位,即相对于 "html" 标签的字体大小。例如,如果 "html" 标签的字…...

【GPT-4】GPT-4 相关内容总结
目录 编辑 官网介绍 GPT-4 内容提升总结 GPT-4 简短版总结 GPT-4 基础能力 GPT-4 图像处理 GPT-4 技术报告 训练过程 局限性 GPT-4 风险和应对措施 开源项目:OpenAI Evals 申请 GPT-4 API API的介绍以及获取 官网介绍 官网:GPT-4 API候…...

5.springcloud微服务架构搭建 之 《springboot集成Hystrix》
1.springcloud微服务架构搭建 之 《springboot自动装配Redis》 2.springcloud微服务架构搭建 之 《springboot集成nacos注册中心》 3.springcloud微服务架构搭建 之 《springboot自动装配ribbon》 4.springcloud微服务架构搭建 之 《springboot集成openFeign》 目录 1.项目…...
【工作中问题解决实践 七】SpringBoot集成Jackson进行对象序列化和反序列化
去年10月份以来由于公司和家里的事情太多,所以一直没有学习,最近缓过来了,学习的脚步不能停滞啊。回归正题,其实前年在学习springMvc的时候也学习过Jackson【Spring MVC学习笔记 五】SpringMVC框架整合Jackson工具,但是…...

香港服务器遭受DDoS攻击后如何恢复运行?
您是否发现流量异常上升?您的网站突然崩溃了吗?当您注意到这些迹象时,可能是在陷入了DDoS攻击的困境,因而,当开始考虑使用香港服务器时,也应该考虑香港服务器设备受DDoS攻击时,如何从中恢复。 在 DDoS 攻击香港…...
【Hive】配置
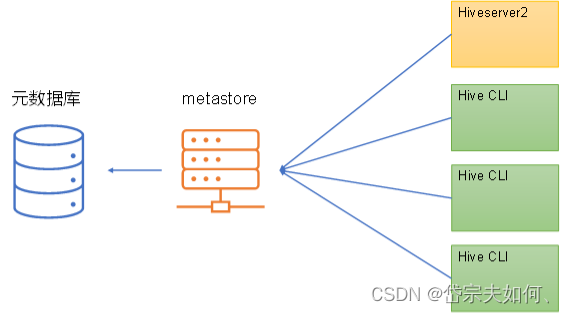
目录 Hive参数配置方式 参数的配置方式 1. 文件配置 2. 命令行参数配置 3. 参数声明配置 配置源数据库 配置元数据到MySQL 查看MySQL中的元数据 Hive服务部署 hiveserver2服务 介绍 部署 启动 远程连接 1. 使用命令行客户端beeline进行远程访问 metastore服务 …...

IP-GUARD如何强制管控电脑设置开机密码要符合密码复杂度?
如何强制管控电脑设置开机密码要符合密码复杂度? 7 可以在控制台-【策略】-【定制配置】,添加一条配置,开启系统密码复杂度检测。 类别:自定义 关键字:bp_password_complexity 内容:1 效果图:...

剑指 Offer II 031. 最近最少使用缓存
题目链接 剑指 Offer II 031. 最近最少使用缓存 mid 题目描述 运用所掌握的数据结构,设计和实现一个 LRU(Least Recently Used,最近最少使用) 缓存机制 。 实现 LRUCache类: LRUCache(int capacity)以正整数作为容量 capacity初始化 LRU缓…...

44岁了,我从没想过在CSDN创作2年,会有这么大收获
1998年上的大学,02年毕业,就算从工作算起,我也有20余年的码龄生涯了。 但正式开启博文的写作,却是2021年开始的,差不多也就写了2年的博客,今天我来说说我在CSDN的感受和收获。 我是真的没想到,…...
相位相参信号源的设计--示波器上的信号不稳定,来回跑?
目录乱跑的波形边沿触发触发方式外部触发相参与非相参相位相参的射频信号源样机外观与内部设计软件设计上位机软件信号源使用方法PWM触发信号射频信号的时域波形射频信号的频谱输出功率在示波器的实际使用当中波形在示波器的时域上乱跑,左右移动,定不下来…...

Spring Boot 整合 RabbitMQ 多种消息模式
Spring Boot 整合 RabbitMQ 多种消息模式 准备工作集成 RabbitMQ发布/订阅模式点对点模式主题模式总结Spring Boot 是一个流行的 Java 应用程序开发框架,而 RabbitMQ 是一款可靠的消息队列软件。将 Spring Boot 和 RabbitMQ 结合起来可以帮助我们轻松地实现异步消息传递。Rabb…...

node多版本控制
前言 最近在折腾Python,并将node升级至v18.14.2。突然发现一个旧项目无法运行,也无法打包,里面的node-sass报错,显然这是因为node版本过高导致的。 将node版本降低至以前的v14.16.0,果然立马就能正常运行。 存在不同…...

Redis set集合
Redis set (集合)遵循无序排列的规则,集合中的每一个成员(也就是元素,叫法不同而已)都是字符串类型,并且不可重复。Redis set 是通过哈希映射表实现的,所以它的添加、删除、查找操作…...
漫画:什么是希尔排序算法?
希尔排序(ShellSort)是以它的发明者Donald Shell名字命名的,希尔排序是插入排序的改进版,实现简单,对于中等规模数据的性能表现还不错 一、排序思想 前情回顾:漫画:什么是插入排序算法…...
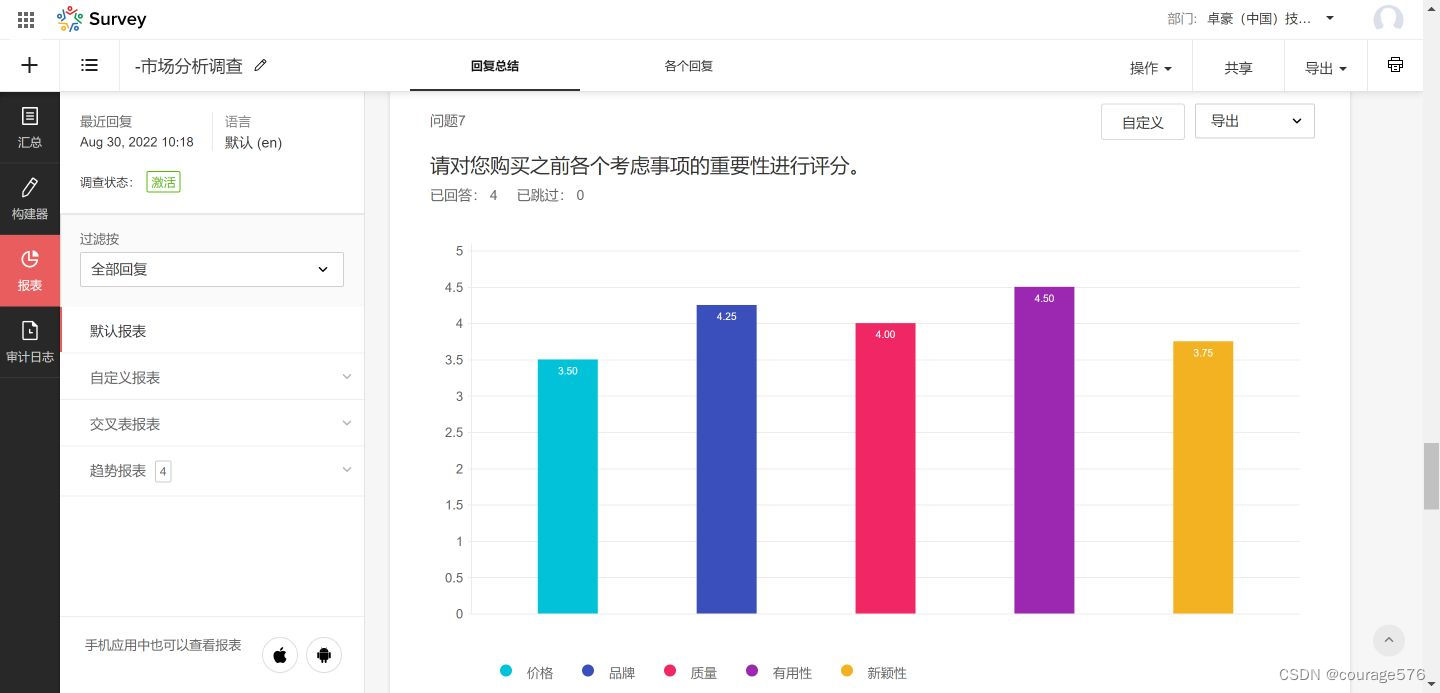
问卷工具选择要看哪些方面?
通常来讲,我们在使用一款问卷制作工具制作问卷时会有哪些需求呢? 一、用户需求 1、操作简单,易上手。 2、能够满足用户个性化的需求。 3、提供多语言服务。 4、能够帮助发布以及数据收集。 5、简化数据分析 市面上的问卷调查制作工具都…...
Qt之QPainter绘制多个矩形/圆形(含源码+注释)
一、绘制示例图 下图绘制的是矩形对象,但是将绘制矩形函数(drawRect)更改为绘制圆形(drawEllipse)即可绘制圆形。 二、思路解释 绘制矩形需要自然要获取矩形数据,因此通过鼠标事件获取每个矩形的rect数…...
介绍两款红队常用的信息收集组合工具
介绍两款红队常用的信息收集组合工具1.Ehole本地识别FOFA识别结果输出2.AlliN1.Ehole EHole(棱洞)3.0 红队重点攻击系统指纹探测工具 EHole是一款对资产中重点系统指纹识别的工具,在红队作战中,信息收集是必不可少的环节,如何才能从大量的资…...
类ChatGPT国产大模型ChatGLM-6B,单卡即可运行
2023年3月14日GPT4又发布了,在ChatGPT发展如火如荼的当下,我们更应该关注国内的进展,今天将分享一个清华大学基于GLM-130B模型开发的类似ChatGPT的ChatGLM-6B模型,ChatGLM-6B 是一个开源的、支持中英双语的对话语言模型࿰…...
)
用Python复现FAST天眼数学建模:从坐标变换到促动器伸缩量计算(附完整代码)
用Python复现FAST天眼数学建模:从坐标变换到促动器伸缩量计算(附完整代码) 中国天眼FAST作为全球最大单口径射电望远镜,其主动反射面调节系统堪称现代工程奇迹。当观测不同方位天体时,需要通过促动器精确控制4450块反射…...

从零构建可定制对话系统:模块化架构与RAG实战指南
1. 项目概述:从零构建一个可定制的对话系统最近在折腾一个挺有意思的东西,我把它叫做“定制化聊天系统”。起因很简单,市面上现成的聊天机器人,无论是开源的还是商业的,总感觉差了那么点意思。要么是功能太臃肿&#x…...
)
【仅剩217份】《Midjourney后印象派风格白皮书》V2.3——含17位艺术家专属LoRA适配建议、32组跨文化色彩映射表及实时风格强度校准工具(2024.06内部封测版)
更多请点击: https://intelliparadigm.com 第一章:后印象派风格的视觉基因与Midjourney语义解码 后印象派并非对自然的模仿,而是对色彩、结构与主观情绪的系统性重构——梵高旋转的星云、塞尚凝固的苹果、高更平面化的塔希提图腾,…...

ARM Jazelle技术:硬件加速Java字节码执行详解
1. ARM Jazelle技术概述Jazelle技术是ARM架构中用于硬件加速Java字节码执行的关键扩展,最早出现在ARMv5TE架构中。这项技术通过在处理器内部集成Java字节码执行单元,实现了Java虚拟机(JVM)功能的硬件化。与传统的软件解释器相比,Jazelle能够将…...

ARM Debug Interface v5.1架构解析与调试实践
1. ARM Debug Interface v5.1架构深度解析1.1 调试接口技术演进与核心价值ARM调试接口(ADI)技术历经多次迭代,v5.1版本作为当前主流标准,在嵌入式系统调试领域确立了关键地位。调试接口本质上是处理器核与外部调试工具之间的标准化通信桥梁,其…...

工控一体机电脑核心性能特征解析:从选型到部署的实战指南
1. 项目概述:为什么我们需要重新审视工控一体机电脑?在工业自动化、智能制造、智慧零售乃至边缘计算这些听起来高大上的领域里,有一类设备常常是幕后的“无名英雄”,它不像机器人手臂那样引人注目,也不像云端服务器那样…...
NeoPixel电源设计全攻略:从电流估算到多电源分配
1. 项目概述:为什么NeoPixel电源设计是成败关键如果你玩过NeoPixel或者类似的WS2812B可编程LED,大概率经历过这样的场景:精心设计的动画点亮了十几个灯珠,效果惊艳;但当你兴冲冲地把灯珠数量加到一百个,准备…...

矩阵Zig-Zag遍历:对角线路径的优雅实现
矩阵Zig-Zag遍历:对角线路径的优雅实现 最近刷题遇到一个很有意思的矩阵遍历问题:如何以Zig-Zag(之字形)的方式打印一个二维矩阵? 什么是Zig-Zag遍历? 简单来说,就是从矩阵的左上角开始&#…...

影刀RPA跨境店群运营架构:基于Python的高并发环境隔离与自动化调度系统设计实战
关于我一个曾经死磕底层算法、痴迷于压榨软硬件性能的资深架构师,最后跑去给跨境工作室写店群底层自动化调度系统这件事。 很多以前在技术圈里混的同行,或者是看着我一路从后端重构做到 ImageTransPro 图像处理软件 5.0.3 这种复杂版本迭代的极客朋友们…...

RML2016.10a数据集读取避坑指南:用Python pickle解决‘latin-1’编码报错
RML2016.10a数据集读取避坑指南:用Python pickle解决‘latin-1’编码报错 当你第一次拿到RML2016.10a数据集,满心欢喜准备开始实验时,一个简单的.pkl文件读取操作却可能让你陷入编码错误的泥潭。UnicodeDecodeError: utf-8 codec cant decode…...