多机器人集群网络通信协议分析
本文讨论的是多机器人网络通信各层的情况和协议。
每个机器人连接一个数据传输通信模块(以下简称为数传,也泛指市面上的图传或图数一体的通信模块),数传之间进行组网来传递信息。
根据ISO的划分,网络通信的OSI模型分为从低到高的7层。

参考:
ISO七层协议模型架构、各层的解析及其协议_肥嘟嘟的左卫门的博客-CSDN博客
计算机网络各层涉及协议(超级详细) - 知乎 (zhihu.com)
分布式之远程通信协议_一个想进阶的java菜鸟的博客-CSDN博客
1、物理层(网线、网口、串口)
电气接口、线缆连接。如网口(RJ45)、RS232串口等。这一层只和硬件有关,传输的是0和1的bit流。
数传一般提供串口,但有的数传也同时提供多个串口和网口。对于单片机飞控来说,连接和使用数传的串口是比较容易的。但是对于有linux系统的上位机(如树莓派)来说,使用数传上的网口会更加方便地连接到集群内其他个体。
2、数据链路层(数传、无线网卡、网桥)
该层的作用包括:物理地址寻址、数据的成帧、流量控制、数据的检错、重发等。这一层中将bit流封装成frame帧,即规定了0和1的分包形式。
这一层常见的协议是IEEE 802局域网标准,其中最常见的有IEEE 802.3以太网(也就是常说的有线网),IEEE 802.11无线局域网(也就是常说的WLAN或者WiFi)。
无线数传可能使用的是IEEE 802.11这种WLAN协议,其中802.11n也俗称WiFi4(2.4GHz),802.11ac也俗称WiFi5(仅在5GHz频段工作),802.11ax也俗称WiFi6(速度更快)。但这三种协议传输距离都很近,为了进军IoT物联网市场,802家族还推出了802.11ah协议,俗称WiFi-HaLow(比如阿木实验室的homer数传就是采用的这种协议),其工作在Sub-1GHz频段,但传输距离也只有1km。
常见的无线传输协议还有Zigbee(IEEE 802.15.4),但是组网不灵活,带宽很低。
顺便提一下,如今同时满足传输距离远(10km以上)、带宽高(10Mb以上)、可组网(星型组网或mesh组网)的数传大都是由软件无线电(SDR)实现的,即用可编程的硬件(比如FPGA、DSP)通过软件编程而非电路(模拟或者数字电路)的形式来实现(上述?)通信协议。
3、网络层(路由器,IP)
对网络内的数据包进行路由选择。网络层处理的是数据包(packet),使用的是IP地址(区分不同的机器),作用是路由(为每个数据选择和建立一条通路),常见的设备是路由器、多层交换机。
网络层最常见的协议就是IP协议,其实现了子网内不同机器间的互连,但是实现细节并不需要我们关心,你只需要知道把每台机器设置固定IPv4的IP,并且使得它们的IP在一个网段就行。
如何判断两个IP地址是否在同一个网段?什么是子网掩码? - 知乎 (zhihu.com)
这里重点提一下路由。用过WiFi的都知道,一般需要有一个路由器作为AP,其他节点接入AP,所有消息都经过路由器来路由和转发。比如A机器和B机器通信,也一定是先通过路由器转了一手,因此延迟较大(100ms),而且依赖路由器这个中心节点。
现在一些星型组网的数传就是类似这种架构,需要一个地面端数传来路由,所有天空端数传的消息可能都是经过地面端数传来路由和转发的,延迟较大,而且所有节点必须保持在地面端中心节点的通信范围内,其优点是结构稳定可靠。
还有一种组网方式叫mesh组网,不需要一个专门的节点作为路由器,所有的节点都具有路由功能,自组织形成网络,自愈合。比如无线网卡的Ad-hoc模式,还有一些数传也具有mesh组网的功能。其优点是无中心节点,直接点对点传输延迟小(1ms);缺点是网络结构可能不太稳定,带宽也会比星型网络小一些。
ad-hoc可以参考:ubuntu Ad-Hoc组网通信_adhoc组网_集智飞行的博客-CSDN博客
4、传输层(TCP、UDP,端口)
从这层开始,就是纯软件部分了。传输层关注的是各个机器上的各个应用程序之间通信的问题,最常用的就是TCP和UDP协议。
每一个应用程序都会在网卡注册一个端口号,该层就是端口与端口的通信,处理的数据单位是数据段(segment)。
TCP协议和UDP协议都需要知道应用程序的IP和端口。区别是TCP协议是面向连接的点对点连接,服务器和客户端应用程序必须都在线而且先建立连接,才能进行数据收发,而且还有数据重发的机制保证数据一定传输给对方。而UDP协议不需要建立连接,应用程序只负责向本机的某个端口发送数据或者从别机的某个端口读取数据,而不管有没有程序在接收或者发送,因此UDP协议除了点对点通信外,还支持多播(组播)、广播,即加入组播群的节点都能收到群内所有其他节点的消息。
显然,TCP是可靠的传输协议,缺点是略慢,只能点对点。UDP协议是不可靠的传输协议,支持多点传输。编程中使用socket套接字来进行TCP和UDP通信。
然而有一些消息队列MQ(message queue),比如ZeroMQ或者MQTT,将TCP的连接过程封装了一下,让用户使用起来也具有UDP那样的效果,比如不关心是否有客户端、服务器在连接,支持一对多传输等。我的swarm_ros_bridge就是采用了ZeroMQ对TCP的封装来实现多机器人应用程序之间灵活的通信:
集群多机ROS通信中间件:swarm_ros_bridge_ros 中间件_集智飞行的博客-CSDN博客
机器人集群多机间通信是采用UDP还是TCP好呢?
1. 从通信质量来看
如果不关心数据实时性,而只要求数据不能丢弃,那么TCP更可靠。如果只关心数据流的实时性,看重低延迟,那么UDP可能好一些(TCP其实也不慢)。
2. 从连接方式来看
如果事先不知道所有机器人的IP,只知道程序用的端口,那么应当用UDP的组播,即所有机器人都加入这个组播地址,往组播群里发消息,则其他个体都能收到。比如做一个多机地面站,接入飞机的IP可能事先并不确定,此时应当用UDP组播。
3. 从通信带宽占用来看
UDP组播/广播由于向群里所有其他个体都发送了消息,可能有些个体并不需要知道这些消息,这造成了带宽的浪费。相比之下,TCP点对点通信就减少了这种带宽的浪费。
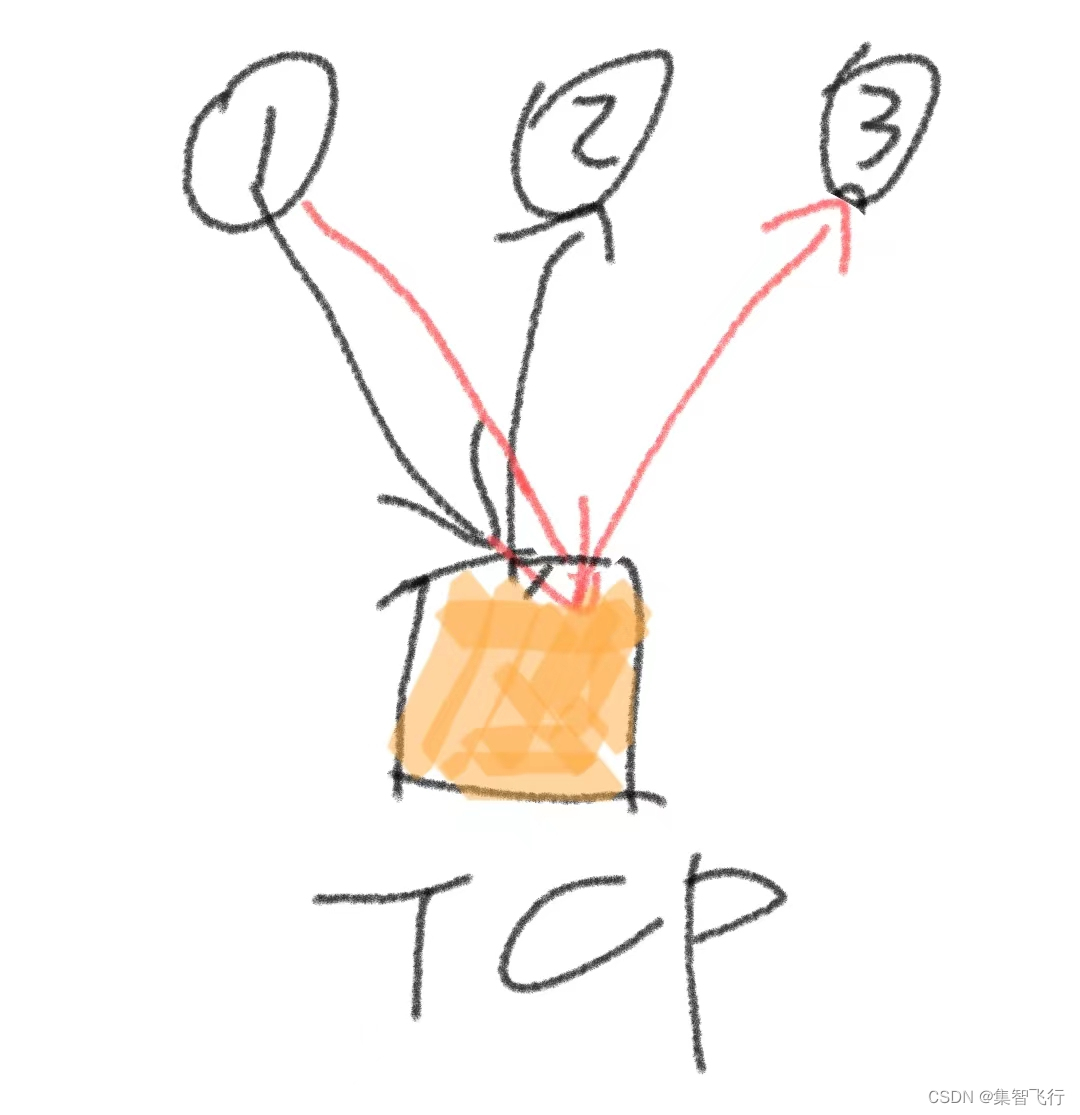
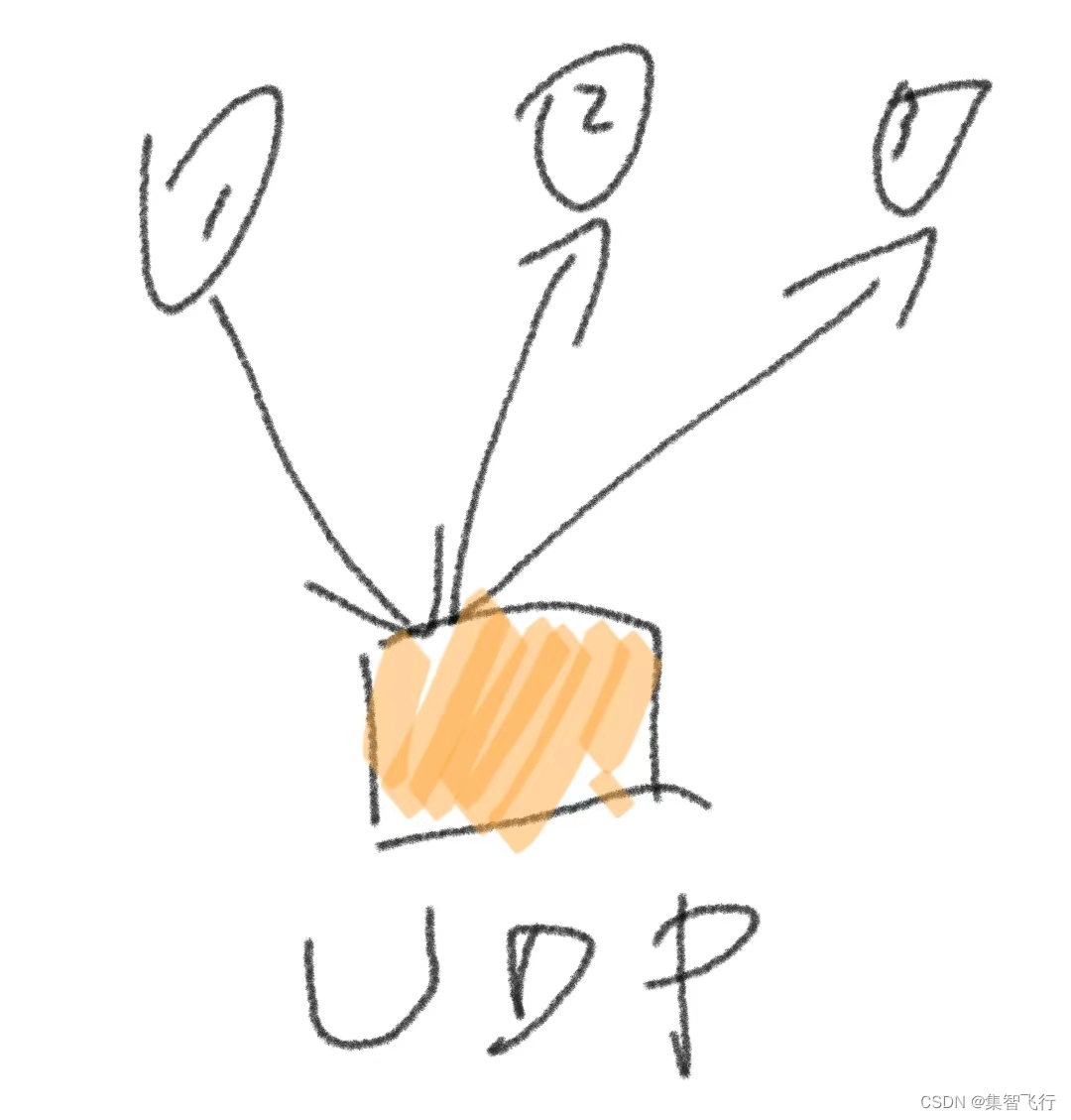
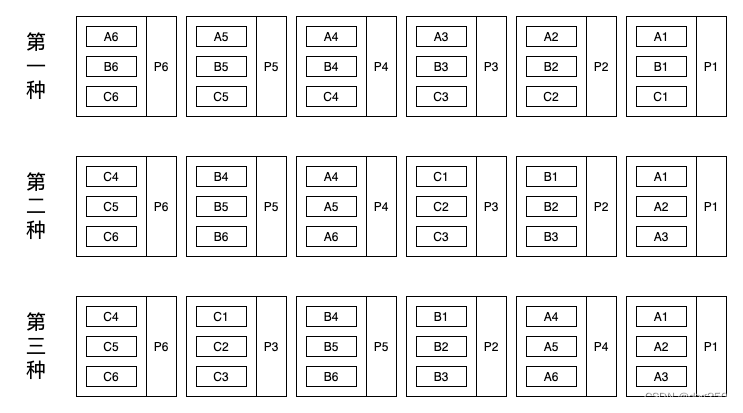
但是,如果某个体和其余个体通信的内容都是一样的,比如要向N个其他节点广播自身的位置,那UDP组播更节省带宽。因为UDP组播情况下每条链路、每个设备都最多只会经过一次,因此占用的带宽不会随着广播域的增大而扩大。而TCP需要为每两两连接的个体发送一次相同的数据包。
比如下图,黄色方块代表星型组网中的路由器,所有消息都要经过它转发,那么TCP显然比UDP多发了一次相同的数据。
也许,为每个机器人设置一个不同的UDP组播群,需要它信息的邻居加入这个组播群,这是比广播或者TCP通信更好的方法?
对于数据量不大的情况,TCP点对点通信完全足以胜任。
参考: UDP广播和TCP链接传送数据,哪个更节省带宽? - 知乎 (zhihu.com)
UDP广播和TCP链接传送数据,哪个更节省带宽? - 知乎 (zhihu.com)
5、会话层
该层被弃用。
6、表示层
该层被弃用。
7、应用层(HTTP、DNS、ssh、mavlink)
这一层是纯软件部分,关注的是应用程序之间传输的报文的格式协议。常见的协议比如DNS协议(解析域名,运行在UDP协议之上,使用端口号53),HTTP协议(浏览器网页协议)。多机器人之间传递信息的应用层协议完全可以自己定义,比如自己规定报文中每帧的内容含义。也可以用一些通用的协议标准,比如mavlink(常用于无人机之间)。
我的swarm_ros_bridge其实传输的就是序列化(serialize)后的ROS消息,并且为每一个ROS消息/话题单独开了一个端口。可以理解为其应用层协议就是ROS message的定义方式。
有时候,传输层和应用层之间还会加一个中间层,比如DDS(Data Distribution Service)就是以数据为中心的中间件协议和API标准。DDS将应用层程序从操作系统,网络传输和低级数据格式的详细信息中抽象出来。以不同的编程语言提供了相同的概念和API,从而允许应用程序跨操作系统,语言和处理器体系结构交换信息。底层细节,如数据线格式、发现、连接、可靠性、协议、传输选择、QoS、安全性等都由中间件管理。
swarm_ros_bridge也属于中间层,都是为了简化应用层的开发,避免繁琐的直接对传输层协议的操作。本质上,中间层也属于应用层。
相关文章:
多机器人集群网络通信协议分析
本文讨论的是多机器人网络通信各层的情况和协议。 每个机器人连接一个数据传输通信模块(以下简称为数传,也泛指市面上的图传或图数一体的通信模块),数传之间进行组网来传递信息。 根据ISO的划分,网络通信的OSI模型分…...

【PyTorch】手把手带你快速搭建PyTorch神经网络
手把手带你快速搭建PyTorch神经网络1. 定义一个Class2. 使用上面定义的Class3. 执行正向传播过程4. 总结顺序相关资料话不多说,直接上代码1. 定义一个Class 如果要做一个神经网络模型,首先要定义一个Class,继承nn.Module,也就是i…...

【完整代码】用HTML/CSS制作一个美观的个人简介网页
【完整代码】用HTML/CSS制作一个美观的个人简介网页整体结构完整代码用HTML/CSS制作一个美观的个人简介网页——学习周记1HELLO!大家好,由于《用HTML/CSS制作一个美观的个人简介网页》这篇笔记有幸被很多伙伴关注,于是特意去找了之前写的完整…...

Java分布式事务(九)
文章目录🔥XA强一致性分布式事务实战_Atomikos介绍🔥XA强一致性分布式事务实战_业务说明🔥XA强一致性分布式事务实战_项目搭建🔥XA强一致性分布式事务实战_多数据源实现🔥XA强一致性分布式事务实战_业务层实现…...
基于深度学习的动物识别系统(YOLOv5清新界面版,Python代码)
摘要:动物识别系统用于识别和统计常见动物数量,通过深度学习技术检测日常几种动物图像识别,支持图片、视频和摄像头画面等形式。在介绍算法原理的同时,给出Python的实现代码、训练数据集以及PyQt的UI界面。动物识别系统主要用于常…...

K8S集群之-ETCD集群监控
### 生产ETCD集群监控核心指标 etcd服务存活状态 up{job~"kubernetes-etcd.*"}0 说明:up0代表服务挂掉 etcd是否有脱离情况 etcd_server_has_leader{job~"kubernetes-etcd.*"}0 说明:每个instance,该值应该都…...
一文弄懂熵、交叉熵和kl散度(相对熵)
一个系统中事件发生的概率越大,也就是其确定性越大,则其包含的信息量越少,可以认为一个事件的信息量就是该事件发生难度的度量,事件所包含的信息量越大则其发生的难度越大。并且相互独立的事件,信息量具有可加性。相互…...
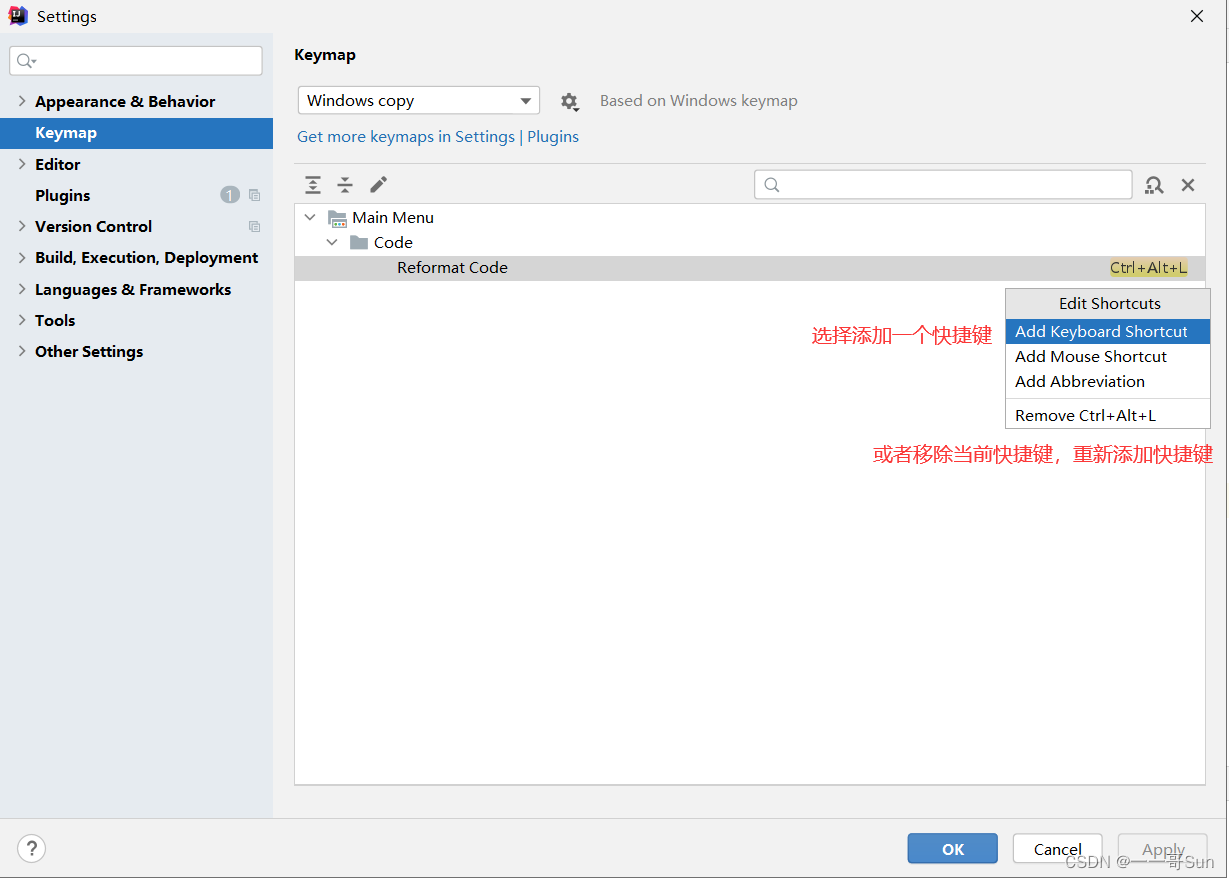
10从零开始学Java之开发Java必备软件Intellij idea的安装配置与使用
作者:孙玉昌,昵称【一一哥】,另外【壹壹哥】也是我哦CSDN博客专家、万粉博主、阿里云专家博主、掘金优质作者前言壹哥在前面的文章中,带大家下载、安装、配置了Eclipse这个更好用的IDE开发工具,并教会了大家如何在Ecli…...

04 - 进程参数编程
---- 整理自狄泰软件唐佐林老师课程 查看所有文章链接:(更新中)Linux系统编程训练营 - 目录 文章目录1. 问题1.1 再论execve(...)1.2 main函数(默认进程入口)1.3 进程空间概要图1.4 编程实验:进程参数剖析1…...

【python进阶】你真的懂元组吗?不仅是“不可变的列表”
📚引言 🙋♂️作者简介:生鱼同学,大数据科学与技术专业硕士在读👨🎓,曾获得华为杯数学建模国家二等奖🏆,MathorCup 数学建模竞赛国家二等奖🏅,…...
第13章编程练习)
《C++ Primer Plus》(第6版)第13章编程练习
《C Primer Plus》(第6版)第13章编程练习《C Primer Plus》(第6版)第13章编程练习1. Cd类2. 使用动态内存分配重做练习13. baseDMA、lacksDMA、hasDMA类4. Port类和VintagePort类《C Primer Plus》(第6版)第…...
【多线程】多线程案例
✨个人主页:bit me👇 ✨当前专栏:Java EE初阶👇 ✨每日一语:we can not judge the value of a moment until it becomes a memory. 目 录🍝一. 单例模式🍤1. 饿汉模式实现🦪2. 懒汉模…...
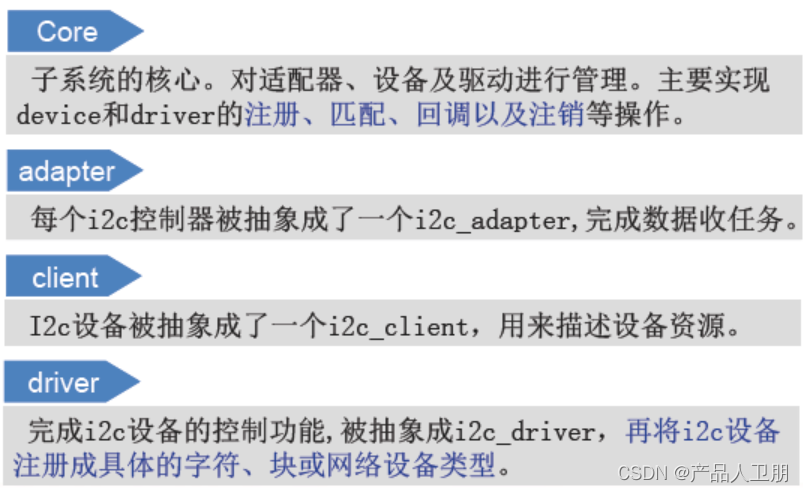
【IoT】嵌入式驱动开发:IIC子系统
IIC有三种接口实现方式 三种时序对比: 图1 IIC子系统组成 图2 图3 IIC操作流程 设备端 1.i2c_get_adapter 2.i2c_new_device(相当于register设备) 3.I2c_put_adapter 驱动端 1.填充i2c_driver 2.i2c_add_driver(相当于register驱动) 3.在probe中建立访问方式 client相…...
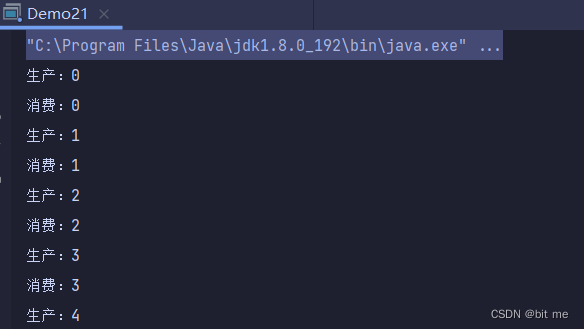
DJ2-4 进程同步(第一节课)
目录 2.4.1 进程同步的基本概念 1. 两种形式的制约关系 2. 临界资源(critical resource) 3. 生产者-消费者问题 4. 临界区(critical section) 5. 同步机制应遵循的规则 2.4.2 硬件同步机制 1. 关中断 2. Test-and-Set …...
AI独立开发者:一周涨粉8万赚2W美元;推特#HustleGPT GPT-4创业挑战;即刻#AIHackathon创业者在行动 | ShowMeAI周刊
👀日报&周刊合辑 | 🎡生产力工具与行业应用大全 | 🧡 点赞关注评论拜托啦! 这是ShowMeAI周刊的第7期。聚焦AI领域本周热点,及其在各圈层泛起的涟漪;拆解AI独立开发者的盈利案例,关注中美AIG…...
不要迷信 QUIC
很多人都在强调 QUIC 能解决 HoL blocking 问题,不好意思,我又要泼冷水了。假设大家都懂 QUIC,不再介绍 QUIC 的细节,直接说问题。 和 TCP 一样,QUIC 也是一个基于连接的,保序的可靠传输协议,T…...

【28】Verilog进阶 - RAM的实现
VL53 单端口RAM 1 思路 简简单单,读取存储器单元值操作即可 2 功能猜想版 说明: 下面注释就是我对模块端口信号 自己猜测的理解。 因为题目并没有说清楚,甚至连参考波形都没有给出。 唉,这就完全是让人猜测呢,如果一点学术背景的人来刷题,指定不容易!! 好在,我有较为…...

【MySQL】聚合查询
目录 1、前言 2、插入查询结果 3、聚合查询 3.1 聚合函数 3.1.1 count 3.1.2 sum 3.1.3 avg 3.1.4 max 和 min 4、GROUP BY 子句 5、HAVING 关键字 1、前言 前面的内容已经把基础的增删改查介绍的差不多了,也介绍了表的相关约束, 从本期开始…...
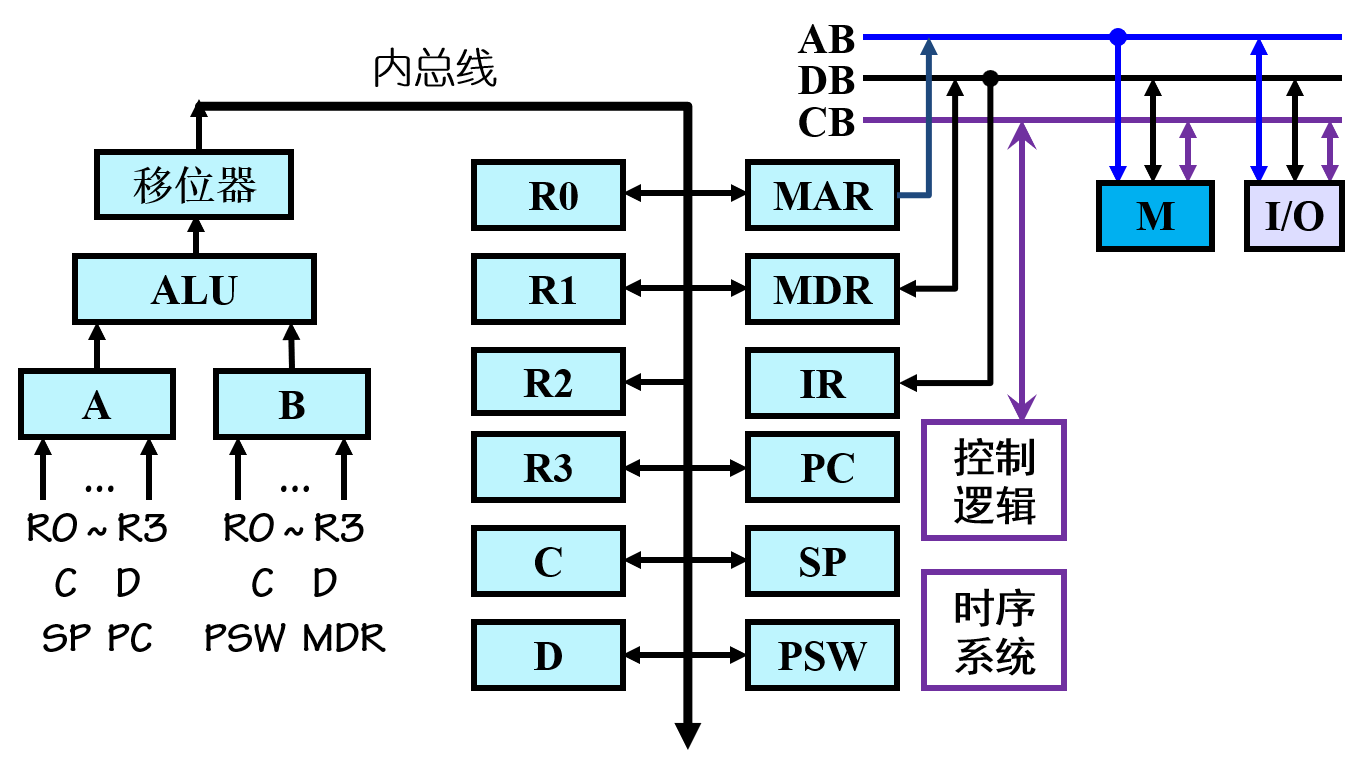
初时STM32单片机
目录 一、单片机基本认知 二、STM系列单片机命名规则 三、标准库与HAL库区别 四、通用输入输出端口GPIO 五、推挽输出与开漏输出 六、复位和时钟控制(RCC) 七、时钟控制 八、中断和事件 九、定时器介绍 一、单片机基本认知 单片机和PC电脑相比…...

debian部署docker(傻瓜式)
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 debian10部署dockerdebian10部署docker(傻瓜式)一、准备工作二、**使用 APT 安装,注意要先配置apt网络源**1.配置网络源2.官方下载三、安装…...

别再手动输路径了!用VS Code Remote-WSL一键直达Ubuntu 20.04的home目录
极速直达WSL开发环境:VS Code高效工作流全指南 每次在Windows和WSL之间来回切换路径,就像在两个平行宇宙间手动搭建桥梁。作为深度使用WSL的开发者,我经历过无数次在资源管理器地址栏手输\\wsl$的痛苦,也曾在终端反复cd到项目目录…...
化适配实战:从零实现「点击按钮退出应用」插件)
Flutter 鸿蒙(OpenHarmony)化适配实战:从零实现「点击按钮退出应用」插件
一、引言 随着鸿蒙生态的持续发展,Flutter 作为跨平台开发的主流框架,对鸿蒙系统的支持也越来越完善。很多 Flutter 开发者在迁移鸿蒙应用时,都会遇到「应用退出」的基础需求:点击按钮直接关闭应用,回到系统桌面。 本…...

SSM+JSP动漫网站源码+论文
代码可以查看文章末尾⬇️联系方式获取,记得注明来意哦~🌹 分享万套开题报告任务书答辩PPT模板 作者完整代码目录供你选择: 《SpringBoot网站项目》1800套 《SSM网站项目》1500套 《小程序项目》1600套 《APP项目》1500套 《Python网站项目》…...

DYOR 嘉创地产 02421.HK
文章目录1.公司概况1.1 简介1.2 股权结构1.3 核心资质与定位2.业务布局3.财务与市场表现:业绩承压,规模迷你3.1 业绩大幅下滑3.2 市场表现落后3.3 规模在行业中垫底4.核心优势5.潜在风险与隐忧6.小结参考文献1.公司概况 1.1 简介 嘉创地产是一家脱胎于…...

数据库运维与数据安全:备份恢复、日志分析与故障排查
下面的内容大家根据实际情况,公司的业务还有重点择机选择,不是所有的蓝翔都有挖掘机 如果说之前的索引优化是“飙车”,那么今天的主题就是“系安全带”和“买保险”。 在运维的世界里,没有“如果”,只有“万一”。当…...

Shell编程避坑指南:为什么你的while循环总出问题?7个常见错误排查
Shell编程避坑指南:为什么你的while循环总出问题?7个常见错误排查 在Shell脚本开发中,while循环是处理未知迭代次数的利器,但也是错误的高发区。很多开发者在使用while时经常遇到脚本卡死、逻辑异常或结果不符合预期等问题。本文将…...

零基础入门Python爬虫:借助快马AI生成你的第一个可运行爬虫脚本
今天想和大家分享一下我作为Python爬虫新手的学习经历。刚开始接触爬虫时,面对各种库和概念真的有点懵,直到发现了InsCode(快马)平台,它让我用自然语言描述需求就能生成可运行的代码,大大降低了入门门槛。 爬虫的基本原理 爬虫就像…...

MIKE URBAN中如何添加污水管水质
管网中的水质一直是管网模型中的一个难题,很多群友也要求小编更新水质方面的内容,一方面,其实水质相关的内容官方资料已经很多了, 觉得没必要重复更新。另一方面,管道水质率定实在太难以率定,很难算的准确。…...

如何在Charmbracelet Log中实现结构化日志记录的5个技巧
如何在Charmbracelet Log中实现结构化日志记录的5个技巧 【免费下载链接】log A minimal, colorful Go logging library 🪵 项目地址: https://gitcode.com/gh_mirrors/log1/log Charmbracelet Log是一款轻量级且色彩丰富的Go日志库,支持结构化日…...
Pixelorama:从像素小白到艺术大师的完整指南
Pixelorama:从像素小白到艺术大师的完整指南 【免费下载链接】Pixelorama Unleash your creativity with Pixelorama, a powerful and accessible open-source pixel art multitool. Whether you want to create sprites, tiles, animations, or just express yours…...