从零开始的机械臂yolov5抓取gazebo仿真(四)
Moveit与Gazebo联合仿真
上一篇博客已经将moveit!配置完毕,然而想要让moveit!控制gazebo中的机械臂,还需要进行一些接口的配置。现在我们有的功能包为sunday_description、sunday_moveit_config这两个功能包。且已经配置好xacro文件,本篇内容需要进行gazebo功能包的配置以及moveit功能包的文件修改。
sunday_gazebo
创建sunday_gazebo功能包
catkin_create_pkg sunday_gazebo roscpp rospy std_msgs
创建launch、config、world、scripts等文件夹,其列表如下所示
.
├── CMakeLists.txt
├── config
├── include
├── launch
├── package.xml
├── scripts
├── src
└── world配置关节轨迹控制器
创建sunday_gazebo/config/sunday_trajectory_control.yaml文件,用于配置关节轨迹控制器,代码如下:
sunday:arm_joint_controller:type: "position_controllers/JointTrajectoryController"joints:- joint_1- joint_2- joint_3- joint_4- joint_5- joint_6gains:joint_1: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_2: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_3: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_4: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_5: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}joint_6: {p: 1000.0, i: 0.0, d: 0.1, i_clamp: 0.0}对应创建sunday_gazebo/launch/sunday_trajectory_controller.launch文件,用于加载上述yaml文件代码如下:
<launch><rosparam file="$(find sunday_gazebo)/config/sunday_trajectory_control.yaml" command="load"/><node name="arm_controller_spawner" pkg="controller_manager" type="spawner" respawn="false"output="screen" ns="/sunday" args="arm_joint_controller"/></launch>
配置关节状态控制器
创建sunday_gazebo/config/sunday_gazebo_joint_states.yaml文件,用于配置关节状态控制器,代码如下:
sunday:# Publish all joint states -----------------------------------joint_state_controller:type: joint_state_controller/JointStateControllerpublish_rate: 50
对应创建sunday_gazebo/launch/sunday_gazebo_states.launch文件,用于加载上述yaml文件代码如下:
<launch><!-- 将关节控制器的配置参数加载到参数服务器中 --><rosparam file="$(find sunday_gazebo)/config/sunday_gazebo_joint_states.yaml" command="load"/><node name="joint_controller_spawner" pkg="controller_manager" type="spawner" respawn="false"output="screen" ns="/sunday" args="joint_state_controller" /><!-- 运行robot_state_publisher节点,发布tf --><node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher"respawn="false" output="screen"><remap from="/joint_states" to="/sunday/joint_states" /></node></launch>
配置gazebo环境
创建sunday_gazebo/launch/sunday_gazebo_world.launch文件,用于加载gazebo环境,代码如下:
<launch><!-- these are the arguments you can pass this launch file, for example paused:=true --><arg name="paused" default="false"/><arg name="use_sim_time" default="true"/><arg name="gui" default="true"/><arg name="headless" default="false"/><arg name="debug" default="false"/><!-- We resume the logic in empty_world.launch --><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="debug" value="$(arg debug)" /><arg name="gui" value="$(arg gui)" /><arg name="paused" value="$(arg paused)"/><arg name="use_sim_time" value="$(arg use_sim_time)"/><arg name="headless" value="$(arg headless)"/><arg name="world_name" value="$(find sunday_gazebo)/world/feeding_place.world"/></include><!-- Load the URDF into the ROS Parameter Server --><param name="robot_description" command="$(find xacro)/xacro --inorder '$(find sunday_description)/urdf/sunday.xacro'" /> <!-- Run a python script to the send a service call to gazebo_ros to spawn a URDF robot --><node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"args="-urdf -model sunday -param robot_description"/>
</launch>
配置moveit功能包文件
创建/修改sunday_moveit_config/config/controllers_gazebo.yaml文件,用于配置moveit!控制器接口,代码如下:
controller_manager_ns: controller_manager
controller_list:- name: sunday/arm_joint_controlleraction_ns: follow_joint_trajectorytype: FollowJointTrajectorydefault: truejoints:- joint_1- joint_2- joint_3- joint_4- joint_5- joint_6
修改sunday_moveit_config/launch/sunday_moveit_controller_manager.launch.xml,代码如下:
<launch><!-- loads moveit_controller_manager on the parameter server which is taken as argument if no argument is passed, moveit_simple_controller_manager will be set --><arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" /><param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/><!-- loads ros_controllers to the param server --><rosparam file="$(find sunday_moveit_config)/config/controllers_gazebo.yaml"/>
</launch>
创建/修改sunday_moveit_config/launch/moveit_planning_execution.launch,用于加载planning_group等moveit核心功能,代码如下:
<launch><!-- # The planning and execution components of MoveIt! configured to # publish the current configuration of the robot (simulated or real)# and the current state of the world as seen by the planner --><include file="$(find sunday_moveit_config)/launch/move_group.launch"><arg name="publish_monitored_planning_scene" value="true" /></include><!-- # The visualization component of MoveIt! --><include file="$(find sunday_moveit_config)/launch/moveit_rviz.launch"><arg name="config" value="true" /></include><!-- We do not have a robot connected, so publish fake joint states --><node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"><param name="/use_gui" value="false"/> <rosparam param="/source_list">[/sunday/joint_states]</rosparam></node></launch>
修改sunday_moveit_config/launch/moveit_rviz.launch,使用新版配置工具生成的moveit_rviz.launch文件有些许问题,代码如下:
<launch><arg name="debug" default="false" /><arg unless="$(arg debug)" name="launch_prefix" value="" />
<arg if="$(arg debug)" name="launch_prefix" value="gdb --ex run --args" /><arg name="config" default="false" /><arg unless="$(arg config)" name="command_args" default="" /><arg if="$(arg config)" name="command_args" default="-d $(find sunday_moveit_config)/launch/moveit.rviz" /><node name="$(anon rviz)" launch-prefix="$(arg launch_prefix)" pkg="rviz" type="rviz" respawn="false"args="$(arg command_args)" output="screen"><rosparam command="load" file="$(find sunday_moveit_config)/config/kinematics.yaml"/></node></launch>配置总bringup.launch文件
配置sunday_gazebo/launch/sunday_moveit_bringup.launch,用于加载所有launch文件,代码如下:
<launch><!-- Launch Gazebo --><include file="$(find sunday_gazebo)/launch/sunday_gazebo_world.launch" /><!-- ros_control arm launch file --><include file="$(find sunday_gazebo)/launch/sunday_gazebo_states.launch" /> <!-- ros_control trajectory control dof arm launch file --><include file="$(find sunday_gazebo)/launch/sunday_trajectory_controller.launch" /><!-- moveit launch file --><include file="$(find sunday_moveit_config)/launch/moveit_planning_execution.launch"></include>
</launch>
至此gazebo与moveit功能包配置完毕,将功能包进行编译。sunday_gazebo列表如下
.
├── CMakeLists.txt
├── config
│ ├── sunday_gazebo_joint_states.yaml
│ └── sunday_trajectory_control.yaml
├── include
│ └── sunday_gazebo
├── launch
│ ├── sunday_bringup_moveit.launch
│ ├── sunday_gazebo_states.launch
│ ├── sunday_gazebo_world.launch
│ └── sunday_trajectory_controller.launch
├── package.xml
├── scripts
├── src
└── world└── feeding_place.world
world为配置好的抓取仿真场景。
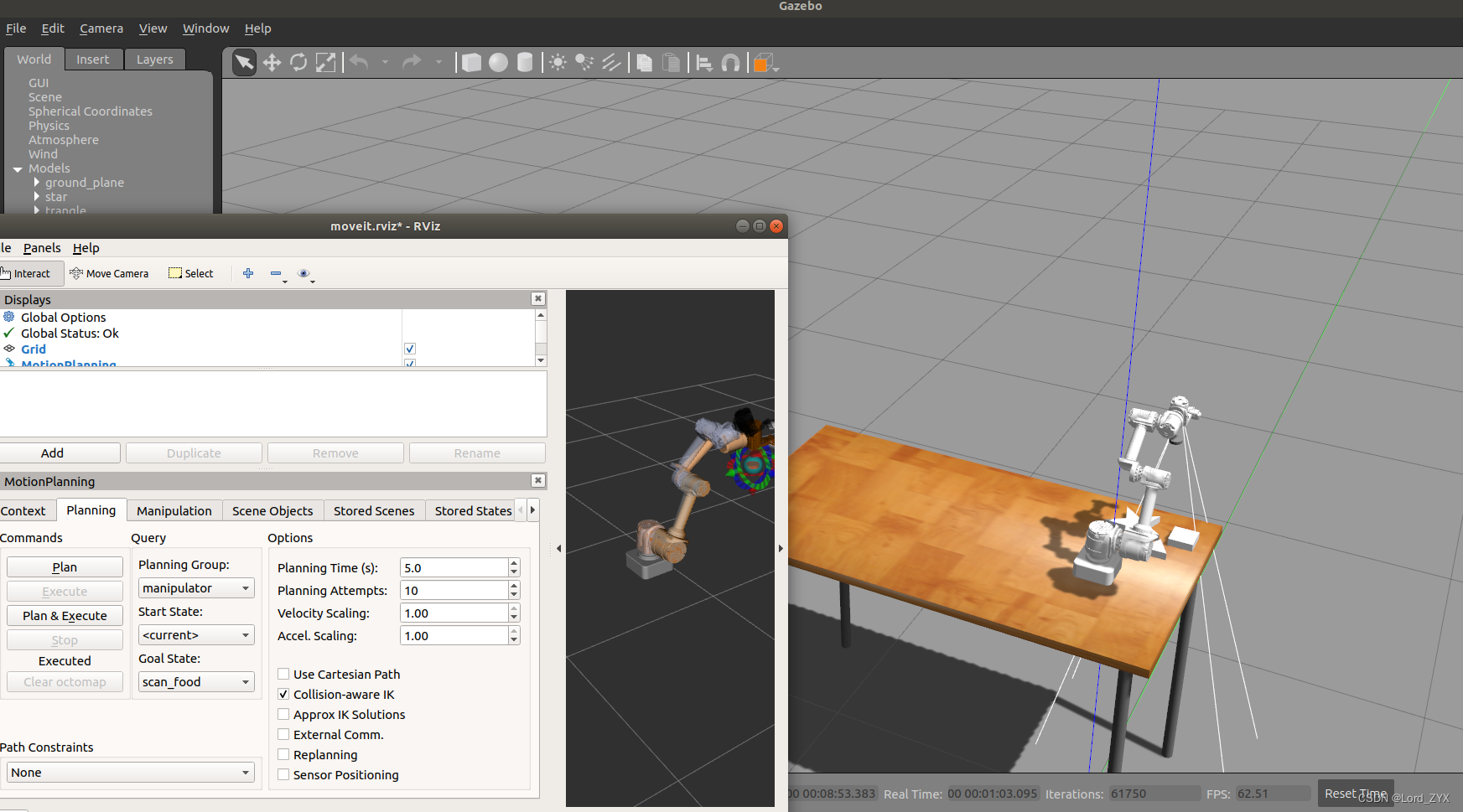
联合仿真测试
运行代码roslaunch sunday_gazebo sunday_bringup_moveit.launch,可以看到同时加载moveit和gazebo场景,在Query栏,将Goal State设置为scan_food,在Commands栏点击Plan & Execute,可以看到gazebo中的机械臂运行到scan_food姿态。
小结
至此moveit!与gazebo联合仿真配置完毕,配置原理部分不展开介绍,各位可以去古月居学习这部分的原理内容。接下去将讲解如何用yolo训练自己的数据集。
参考资料
1.古月居机械臂课程
相关文章:
从零开始的机械臂yolov5抓取gazebo仿真(四)
Moveit与Gazebo联合仿真 上一篇博客已经将moveit!配置完毕,然而想要让moveit!控制gazebo中的机械臂,还需要进行一些接口的配置。现在我们有的功能包为sunday_description、sunday_moveit_config这两个功能包。且已经配置好xacro文件,本篇内容…...

C++修炼之筑基期第一层——认识类与对象
文章目录🌷专栏导读🌷什么是面向对象?🌷类的引入🌷什么是类🌷类的定义方式🌷类的访问限定符与封装🌺访问限定符🌺封装🌷类的作用域🌷类的实例化&a…...

IT 运营监控工具
在技术复杂性日益增加、业务竞争激烈的挑战以及消费者对服务中断接受度降低的世界中,IT 运营效率已成为增长、利润和成功的关键。IT 宕机的影响在几十年前威胁较小,现在意味着价值数百万美元的损失,有时甚至会损失各种规模的组织的业务和声誉…...
java线程之Thread类的基本用法
Thread类的基本用法1. Thread类的构造方法2. Thread的几个常见属性常见属性线程中断等待一个线程小鱼在上一篇博客详细的讲解了如何创建线程,java使用Thread类来创建多线程,但是对于好多没有相关经验的人来说,比较不容易理解的地方在于操作系统调度的执行过程. 我们通过下面代码…...

【js】多分支语句练习(2)
个人名片: 😊作者简介:一名大一在校生,web前端开发专业 🤡 个人主页:python学不会123 🐼座右铭:懒惰受到的惩罚不仅仅是自己的失败,还有别人的成功。 🎅**学习…...

Redis与MySQL的双写一致性问题
Redis与MySQL的双写一致性问题更新缓存? 删除缓存?先更新缓存再更新数据库先更新数据库,再更新缓存先删除缓存再更新数据库先更新数据库,再删除缓存解决方案1. 重试2. 异步重试2.1 使用消息队列实现重试2.2 Binlog实现异步重试删除…...
Java基础:笔试题
文章目录Java 基础题目1. 如下代码输出什么?2. 当输入为2的时候返回值是多少?3. 如下代码输出值为多少?4. 给出一个排序好的数组:{1,2,2,3,4,5,6,7,8,9} 和一个数,求数组中连续元素的和等于所给数的子数组解析第一题第二题第三题第四题方案…...
spring三级缓存以及@Async产生循环引用
spring三级缓存以及Async产生循环引用spring三级缓存介绍三级缓存解除循环引用原理源码对应1、获取A,从三级缓存中获取,没有获取到2、构造A,将A置入三级缓存构造A(创建A实例)置入缓存3、注入属性,构造B扫描缓存实例的相关信息注入…...
【洛谷刷题】蓝桥杯专题突破-深度优先搜索-dfs(5)
目录 写在前面: 题目:P2036 [COCI2008-2009#2] PERKET - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) 题目描述: 输入格式: 输出格式: 输入样例: 输出样例: 解题思路: 代码…...

【Unity3D】Unity3D中在创建完项目后自动创建文件夹列表
推荐阅读 CSDN主页GitHub开源地址Unity3D插件分享简书地址我的个人博客 大家好,我是佛系工程师☆恬静的小魔龙☆,不定时更新Unity开发技巧,觉得有用记得一键三连哦。 一、前言 随着项目开发的体量增大,要导入大量的素材、UI、模…...
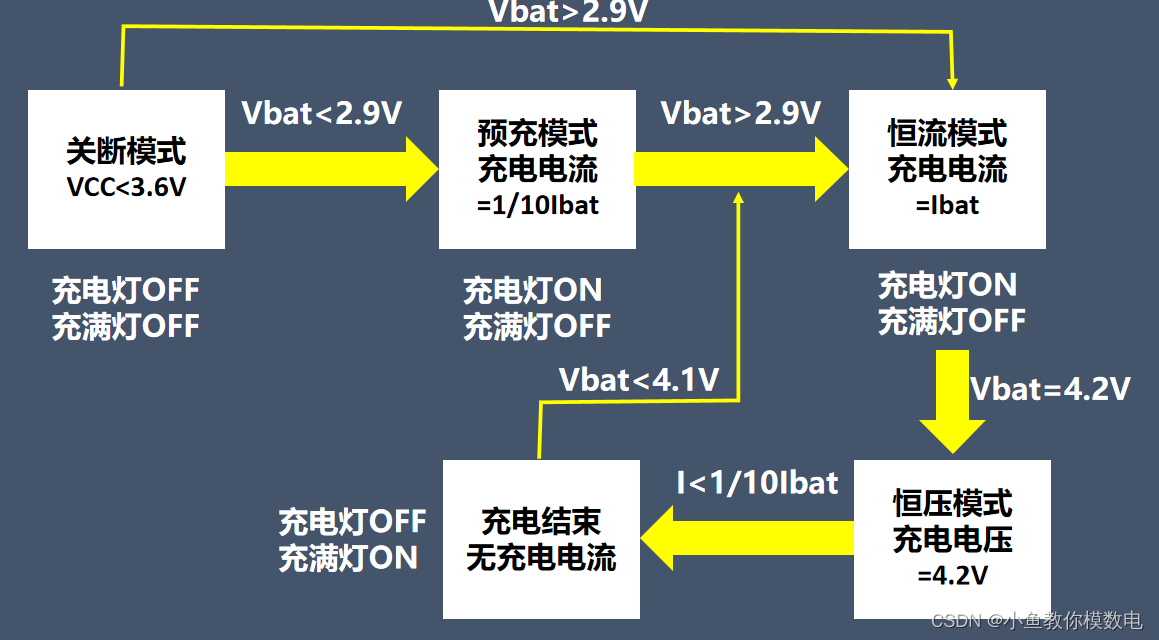
如何设计一个锂电池充电电路(TP4056)
这个是个单节18650锂电池的充电模块,这个是个18650的锂电池,18指的是它的直径是18mm,65指的是它的高度为65mm。这个18650电池的标称电压是3.7V,电池充满时电压为4.2V,一般电池电压越高也就代表它所剩的电量越大。这种锂…...
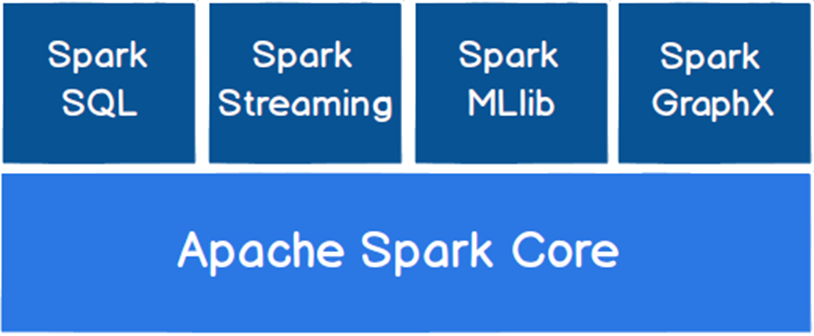
Spark了解
目录 1 概述 2 发展 3 Spark和Hadoop 4 Spark核心模块 1 概述 Apache Spark是一个快速、通用、可扩展的分布式计算系统,最初由加州大学伯克利分校的AMPLab开发。 Spark可以处理大规模数据处理任务,包括批处理、迭代式算法、交互式查询和流处理等。Spa…...

c++STL急急急
文章目录cSTL急急急vector头文件扩容过程用法:size/emptyclear迭代器begin/endfront/backpush_back() 和 pop_back()queue头文件用法循环队列 queue用法优先队列 priority_queue用法stack头文件deque头文件deque中控器:用法set头文件用法迭代器begin/end…...
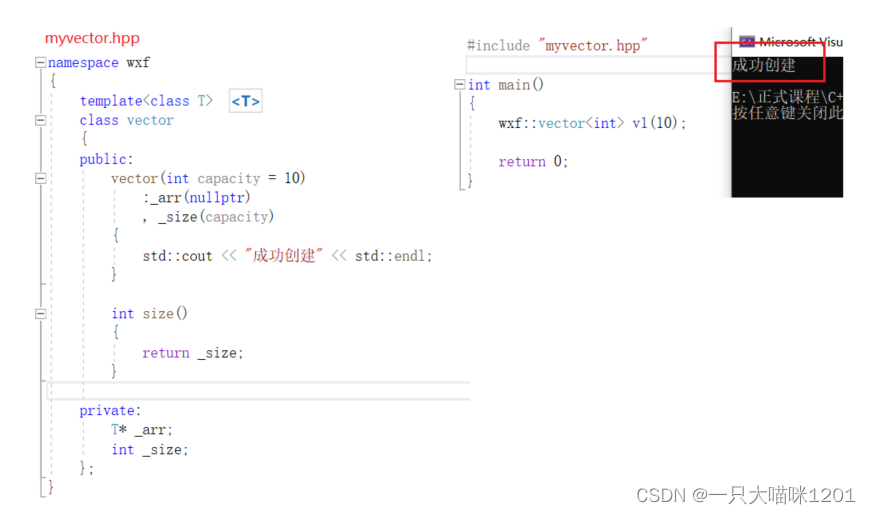
【C++学习】模板进阶——非类型模板参数 | 模板的特化 | 分离编译
🐱作者:一只大喵咪1201 🐱专栏:《C学习》 🔥格言:你只管努力,剩下的交给时间! 模板我们之前一直都在使用,尤其是在模拟STL容器的时候,可以说,模板…...
【C++】C++11新特性——可变参数模板|function|bind
文章目录一、可变参数模板1.1 可变参数的函数模板1.2 递归函数方式展开参数包1.3 逗号表达式展开参数包1.4 empalce相关接口函数二、包装器function2.1 function用法2.2 例题:逆波兰表达式求值2.3 验证三、绑定函数bind3.1 调整参数顺序3.2 固定绑定参数一、可变参数…...

ssm框架之spring:浅聊事务--JdbcTemplate
简介 JdbcTemplate 是 Spring 对 JDBC 的封装,目的是使JDBC更加易于使用,JdbcTemplate是Spring的一部分。JdbcTemplate 处理了资源的建立和释放,它帮助我们避免一些常见的错误,比如忘了总要关闭连接。他运行核心的JDBC工作流&…...

盘点Python那些简单实用的第三方库
文章目录前言关于本文使用 pip 命令下载第三方库1、phone 库(获取手机号码信息)2、geoip2 库(IP 检测功能)3、freegames 库(免费小游戏)4、jionlp 库(解析地址信息)5、pyqrcode 库&a…...

leetCode热题21-26 解题代码,调试代码和思路
前言 本文属于特定的六道题目题解和调试代码。 1 ✔ [160]相交链表 Easy 2023-03-17 171 2 ✔ [54]螺旋矩阵 Medium 2023-03-17 169 3 ✔ [23]合并K个排序链表 Hard 2022-12-08 158 4 ✔ [92]反转链表 II Medium 2023-03-01 155 5 ✔ [415]字符串相加 Easy 2023-03-14 150 6 …...
ChatGPT推出第四代GPT-4!不仅能聊天,还可以图片创作!
3月15日凌晨,OpenAI震撼发布了多模态预训练大模型 GPT-4。 根据官网发布的通告可以知道,GPT-4 实现了以下几个方面的飞跃式提升:强大的AI创作识图能力;文字输入限制提升至 2.5 万字;回答准确性显著提高;能够…...
二叉搜索树:AVL平衡
文章目录一、 二叉搜索树1.1 概念1.2 操作1.3 代码实现二、二叉搜索树的应用K模型和KV模型三、二叉搜索树的性能分析四、AVL树4.1 AVL树的概念4.2 AVL树的实现原理4.3 旋转4.4 AVL树最终代码一、 二叉搜索树 1.1 概念 二叉搜索树( Binary Search Tree,…...

学习框架和推理引擎有什么区别
学习框架和推理引擎通常分别应用在 AI 大模型的训练和推理 (运行)阶段。模型的核心任务是从大量数据中学习规律,完成特定预测或者生成任务,前者即“模型训练”,后者即“模型运行”。在模型训练时ÿ…...

学习网络安全至少需要什么配置的电脑?
很多同学对于学习 Web 渗透所需的电脑配置仍有疑问,所以老师结合自己的教学经验,总结了关于电脑配置要求的一些内容,遂成此文。当然,对于电脑配置的追求是无上限的,所以有条件的话最好还是搞一台配置强劲的电脑。 一、…...

在wsl中利用快马平台五分钟搭建flask博客后端原型
最近在Windows系统下折腾WSL(Windows Subsystem for Linux)时,发现结合InsCode(快马)平台可以快速搭建项目原型,特别适合需要Linux环境特性的开发验证。就拿搭建一个Flask博客后端来说,传统方式从零开始配置环境、编写…...
)
AI 视频生成美女跳舞测评 | 顶级 Prompt实测版(Grok Imagine、Kling AI 3.0、Veo 3.1)
兄弟们,AI 视频生成已经卷到飞起了!之前写小黄文靠grok,现在生成“美女舞蹈”视频也得靠它。 今天上手实测截至今天热门的3款视频生成工具,专攻“美女跳舞”这个高难度场景:动作流畅度、人物一致性、性感画面感、提示…...

别再傻傻分不清HIL和SIL了!用NI PXI和Simulink手把手教你搭建第一个测试环境
从零开始搭建HIL/SIL测试环境:NI PXI与Simulink实战指南 刚接触在环测试的工程师常常被各种术语搞得晕头转向——HIL、SIL、MIL,它们到底有什么区别?更重要的是,接到一个控制器测试任务时,该如何从零开始搭建测试环境&…...

2026最权威的六大降重复率工具解析与推荐
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 飞速发展的人工智能技术,正深切地重塑着学术写作的范式,当下…...

Keyv自定义序列化教程:超越JSON,支持更多数据类型
Keyv自定义序列化教程:超越JSON,支持更多数据类型 【免费下载链接】keyv jaredwray/keyv: 这是一个分布式键值存储库,用于在多个节点上存储数据。适合用于需要分布式存储和访问的场景。特点:易于使用,支持多种数据存储…...

高性能无线基带FPGA实现:开源802.11 WiFi实时信号处理架构解析
高性能无线基带FPGA实现:开源802.11 WiFi实时信号处理架构解析 【免费下载链接】openwifi open-source IEEE 802.11 WiFi baseband FPGA (chip) design: driver, software 项目地址: https://gitcode.com/gh_mirrors/op/openwifi Openwifi是一个基于软件定义…...

智能化时代的数据集成技术革新
在技术领域,我们常常被那些闪耀的、可见的成果所吸引。今天,这个焦点无疑是大语言模型技术。它们的流畅对话、惊人的创造力,让我们得以一窥未来的轮廓。然而,作为在企业一线构建、部署和维护复杂系统的实践者,我们深知…...

厦门GEO软件哪家强?实测主流平台,为你揭秘推荐榜单
在数字化转型浪潮中,GEO(地理定位优化)软件成为企业提升本地化营销效率的关键工具。面对厦门市场上琳琅满目的GEO平台,如何选择一款适配自身业务需求、技术稳定且安全合规的解决方案,成为众多企业面临的难题。作为第三…...