备受青睐的4D毫米波成像雷达,何以助力高阶自动驾驶落地?
近日,海外媒体曝出特斯拉已向欧洲监管机构提交车辆变更申请,并猜测特斯拉最新的自动驾驶硬件HW4.0或将很快量产上车。据爆料,HW4.0最大的变化是马斯克放弃的毫米波雷达又加了回来,根据国外知名博主Greentheonly的拆解分析,新加的雷达很有可能是高分辨率毫米波雷达。早在去年6月,特斯拉就向美国联邦通信委员会(FCC)申请在其电动汽车中使用全新的高分辨率雷达。
马斯克作为创新技术的先锋者和技术普惠主义的践行者,一直倡导特斯拉尽可能少地使用传感器,一是为了降低成本,二是可以减少数据融合与处理给自动驾驶系统造成的挑战。基于在纯视觉感知技术上的领先性,马斯克不仅公开鄙视激光雷达,还先后移除了特斯拉的毫米波雷达和超声波雷达,自此成为“雷达杀手”,坚持用“8摄像头”纯视觉方案实现全自动驾驶。不过即便对纯视觉路线十分自信,马斯克也曾“暧昧”地表示“高分辨率的毫米波雷达胜过纯视觉。”

图片来源:推特
此次马斯克重拾毫米波雷达,表面上看是用多传感融合感知路线打了纯视觉感知路线的脸,不过结合产业发展趋势细究其背后的动机,或许能够因此看到自动驾驶产业更加光明的未来。

自动驾驶汽车发展到今天,智能化程度越来越高,而自动驾驶的终极目标就是推动汽车能够像人类一样感知、认知并行动,最终不再需要人类驾驶员介入以实现无人驾驶。这一点与人工智能发展的趋势一致,人工智能的终极目标就是达到具备认知推理能力的类脑智能。认知,即基于感知到的信息进行加工,进而主动思考和理解,感知只是认知的基础。人工智能时代的自动驾驶只有具备了认知能力,自动驾驶汽车才能更聪明地执行相应的决策。
擅长利用第一性原理探索事物本质的马斯克,正是无人驾驶目标的坚定执行者。从更接近无人驾驶的角度再次考量特斯拉的自动驾驶感知路线,无论是对纯视觉路线的坚持,还是如今对于超高分辨率雷达的认可,马斯克似乎都在做同一个选择,那就是不断提升自动驾驶感知系统的认知能力。
认知对于具有语义分割和理解能力的可见光摄像头而言具有天然优势,不过对于毫米波雷达而言,或许需要艰难的跨越。但显然马斯克已经找到了正解——超高分辨率毫米波雷达。
•4D毫米波成像雷达是何方神圣
为实现盲点检测和定距巡航等功能而存在的传统毫米波雷达,已在汽车产业应用多年,其所拥有的全天候全天时感知特性以及精准测速特性,使得毫米波雷达成为汽车感知系统中重要的传感器之一。
但由于传统车载毫米波雷达测高能力不足,对于路边低矮目标、空中目标以及路面静态目标的区分和识别存在较大局限性,整体输出信息量与可见光摄像头、激光雷达的信息输出不在同一量级,所以在自动驾驶感知系统中的参与度和置信度并不高,无法深度参与自动驾驶感知过程。马斯克就曾表示,摄像头的信息量已经比雷达高上几个数量级,加入雷达的数据实际上降低了信噪比。
面对自动驾驶对感知可靠性和安全性越来越高的要求,一种高信息质量、高性价比的超高分辨率毫米波雷达为自动驾驶感知系统创造出了新的想象空间,也就是近来备受产业关注和投资者青睐的“4D成像雷达”。
4D成像雷达全称为“4D毫米波成像雷达”,“4D”是相对于传统毫米波雷达(也即3D雷达)仅有距离(Range)、速度(Velocity)、方位角(Azimuth)三个维度的信息而言,增加了俯仰角度(Elevation)的信息感知能力,可对纵向目标进行高分辨率地识别;“成像”则类似于激光雷达的点云成像效果,与传统毫米波雷达相比,4D成像雷达的射频收发通道数量多出十倍以上,随着俯仰角分辨率大大提高,能够对目标和环境呈现出丰富的点云图像以及距离、速度和角度信息。
由于当前业界对于4D成像雷达缺乏统一的定义,坊间经常将“4D毫米波成像雷达”与“4D毫米波雷达”相混淆,但二者其实是两种完全不同性质的毫米波雷达。
4D毫米波雷达只是在传统3D雷达的基础上增加了俯仰角度的测量,俯仰向分辨能力较低,此时俯仰角度的信息测量误差较大,因此通过角度信息计算出的高度信息精度依然不高。同时4D毫米波雷达相较于传统3D雷达的输出测量点仅仅只有少量增加,因此4D毫米波雷达本质上仍属于点迹雷达的范畴。而只有4D毫米波成像雷达真正完成了从点迹雷达向成像雷达的进化。
4D成像雷达相较于传统毫米波雷达有着质的飞越,使得毫米波雷达不仅能感知目标的有无,还能勾勒出目标的轮廓,这在传统毫米波点迹雷达时代是难以想象的。基于此,面对智能化程度越来越高的自动驾驶,毫米波雷达力不从心的尴尬局面也将迎来扭转。
“4D成像雷达的出现,将显著提高毫米波雷达在自动驾驶感知中的参与度,”上海几何伙伴智能驾驶有限公司产品总监周明宇对4D成像雷达抱有极大期待,“因为4D成像雷达可以对目标的四大维度进行检测,能够输出高密度高质量的点云信息以实现成像。基于丰富的环境与目标信息输出,再引入神经网络进行深度学习与处理,可以对更多复杂场景下的动静态目标进行更为精准的检测,同时也为毫米波雷达从感知走向认知打下了基础。”
除此之外,“4D成像雷达的出现使得毫米波雷达在应对智能驾驶或自动驾驶中的一些边缘场景(corner case)时也有了用武之地。”据周明宇透露,“我们的4D成像雷达正是为应对一些边缘场景的需求而研发的,比如对高度维障碍物的识别,最典型的就是隧道,以及恶劣天气环境、复杂交通场景等等。自动驾驶需要自车周围完整丰富的环境信息和目标信息,基于这些信息完成智驾功能,比如AVP、APA、FREESPACE等。”

视频来源:几何伙伴官网
•高阶自动驾驶落地“变局”
正如人工智能发展到类脑智能需要不断提高认知推理能力,高阶自动驾驶的发展同样需要具备认知能力,这对作为认知基础的感知系统提出了更高的要求。现阶段最为主流的自动驾驶感知传感器主要有可见光摄像头、激光雷达以及毫米波雷达三大类,其中可见光摄像头和激光雷达同属光学传感器,毫米波雷达属于射频传感器,马斯克如今选择重拾毫米波雷达,客观上促成了异构信息的冗余。随着多传感器的使用,异构信息的大量冗余,对于融合感知算法也带来新的技术要求。
将多传感器信息融合在一起,市场上主流有两种方式,前融合和后融合。4D成像雷达更加有利于实现多传感器的前融合,降低差异度,但同时需要匹配足够优化的融合算法。
高阶自动驾驶行业发展也正在走上一条加速反馈的路程,通过传感器增加感知信息,从而推动认知算法的发展;由于认知算法的计算需求,增加对于芯片处理器的算力要求。基于传感器,认知算法,芯片的三驾马车,进而推动高阶自动驾驶的快速发展,从而实现融合认知,各种复杂场景、恶劣天候下的全无人驾驶或许才能真正像人类一样思考和行动。
而第一个破局点,4D成像雷达的出现,以其海量信号级信息的释放,提高了输出信息的完整性,为异构信息融合认知的实现增加了可能性,同时也为高阶自动驾驶开辟了一条高性价比、能快速商业化落地的技术路径。4D成像雷达既保留了传统毫米波雷达的性能特点——具备速度感知能力和全天候全天时特性且成本低,也能凭借足够丰富的信息量去和可见光摄像头、激光雷达等传感器形成融合。
或许正是因为意识到这一点,如今4D成像雷达越来越被寄予助力高阶自动驾驶落地的厚望。国际上,不仅博世、大陆、采埃孚、电装等在加大力度布局,全球ADAS视觉感知方案巨头Mobileye也加快了对成像雷达研发的进程,其雷达副总裁兼总经理Yaniv Avital就曾表示:“通过提供丰富可靠的数据输出,升级雷达4D感知功能,并减少对多个激光雷达传感器的需求,是大势所趋。”
在国内,4D成像雷达也引起了主机厂、产业链供应商以及科技公司的广泛关注。从2021年开始,可以明显感觉到行业中关于4D成像雷达的消息渐多,当年官宣下场造车的小米和百度一起投资了一家自动驾驶整体解决方案供应商——几何伙伴,该公司就是基于自主研发的4D成像雷达结合可见光视觉和红外成像等,打造“融合感知+智能决策”的自动驾驶软硬件集成系统。
公开资料显示,几何伙伴以“低成本、全天候、高可靠、易量产”的自动驾驶技术路线为主,创新性地将4D成像雷达海量信号级信息进行释放,有效提高了输出信息的完整性,避免了传统经典算法对弱目标、静态目标等信息造成的过度过滤。其自主研发的4D成像雷达,已经具有目标跟踪定位、可行驶区域检测以及自动泊车等能力,助力自动驾驶实现更加精准的环境认知和更加可靠的决策。
除此之外,几何伙伴还基于4D成像雷达生成的点云图像与可见光摄像头生成的视觉图像进行异构信息融合,研发出雷视像素级融合感知系统,实现了信息加强和信息互补,提升系统感知能力的同时增加了安全冗余。同时,几何伙伴采用4D成像雷达结合鱼眼环视相机实现雷视双维SLAM技术,大幅提升建图定位精度和鲁棒性,并且引入停车位等语义地图信息,进一步提升后续泊车时车位检测的准确性,为智能泊车应用提供低成本、易量产、高可靠的软硬一体化定位感知方案,展示了4D成像雷达在行泊一体方案中的广阔应用前景。

视频来源:几何伙伴
汽车智能化变革已成风口的当下,通过全球科技企业在自动驾驶行业中的动作似乎可以捕捉到些许风向:4D成像雷达和异构信息融合认知技术也许就是未来高阶自动驾驶落地的关键,掌握对于这些技术的领先优势,也就提前拿到了自动驾驶商业化落地的入场券。或许正是以上原因,让几何伙伴在2022年又成功获得了德国博世和国际自动机工程师学会(SAE International)的战略投资。据了解,几何伙伴将于近期完成A1轮融资。
•结语
相对市场发展已经十分成熟的传统毫米波雷达,4D成像雷达还是比较新鲜的事物,国内外相关企业大多处于同一起跑线上,不过即便如此,不同的技术路线、战略视野以及研发布局,也影响着每家企业距离成功商业化落地冲刺线的位置,对于国内本土的科创企业而言,其中蕴藏了绝佳的机遇。
回到当下自动驾驶技术向高阶跃迁之际,4D成像雷达作为自动驾驶认知的新入局者,已展示出自身不俗的性能优势。自动驾驶的未来,异构信息融合认知或将成为高阶自动驾驶的感知形态,4D成像雷达作为其中打通感知层,补齐性能短板的重要传感器,正在为自动驾驶发展酝酿一场变局,高阶自动驾驶时代的来临或许比我们想象的更快。
相关文章:
备受青睐的4D毫米波成像雷达,何以助力高阶自动驾驶落地?
近日,海外媒体曝出特斯拉已向欧洲监管机构提交车辆变更申请,并猜测特斯拉最新的自动驾驶硬件HW4.0或将很快量产上车。据爆料,HW4.0最大的变化是马斯克放弃的毫米波雷达又加了回来,根据国外知名博主Greentheonly的拆解分析…...
 LeetCode 合并两个有序数组)
3.20算法题(一) LeetCode 合并两个有序数组
题目链接:算法面试题汇总 - LeetBook - 力扣(LeetCode)全球极客挚爱的技术成长平台 题目描述:给你两个按 非递减顺序 排列的整数数组 nums1 和 nums2,另有两个整数 m 和 n ,分别表示 nums1 和 nums2 中的元…...
QT | 编写一个简单的上位机
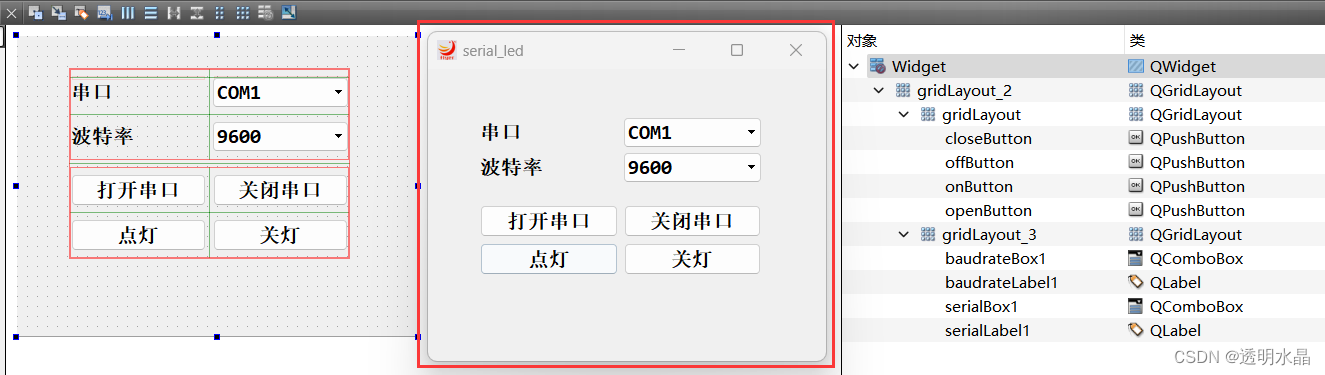
QT | 编写一个简单的上位机 时间:2023-03-19 参考: 1.易懂 | 手把手教你编写你的第一个上位机 2.QT中修改窗口的标题和图标 3.图标下载 1.打开QT Creator 2.新建工程 Qt Creator 可以创建多种项目,在最左侧的列表框中单击“Application”&am…...
DirectX12(D3D12)基础教程(二十一)—— PBR:IBL 的数学原理(2/5)
目录3、IBL 数学原理3.1、基于微平面理论的 “Cook-Torrance” 模型回顾3.2、 ksk_sks 项与菲涅尔项等价消除3.3、拆分“漫反射项”和“镜面反射项”3、IBL 数学原理 接下来,就让我们正式进入整个 IBL 的数学原理的旅程。请注意,前方高能! …...

嵌入式学习笔记——SysTick(系统滴答)
系统滴答前言SysTick概述SysTick是个啥SysTick结构框图1. 时钟选择2.计数器部分3.中断部分工作一个计数周期(从重装载值减到0)的最大延时时间工作流程SysTick寄存器1.控制和状态寄存器SysTick->CTRL2.重装载值寄存器SysTick->LOAD3.当前值寄存器Sy…...

Linux实操之服务管理
文章目录一、服务(service)管理介绍:service管理指令查看服务名服务的运行级别(runlevel):CentOS7后运行级别说明chkconfig指令介绍一、服务(service)管理介绍: 服务(service)本质就是进程,但是是运行在后台的,通常都会监听某个端口,等待其它…...

基于Java+SpringBoot+vue的毕业生信息招聘平台设计和实现【源码+论文+演示视频+包运行成功】
博主介绍:专注于Java技术领域和毕业项目实战 🍅文末获取源码联系🍅 👇🏻 精彩专栏推荐订阅👇🏻 不然下次找不到哟 Java项目精品实战案例(200套) 目录 一、效果演示 二、…...
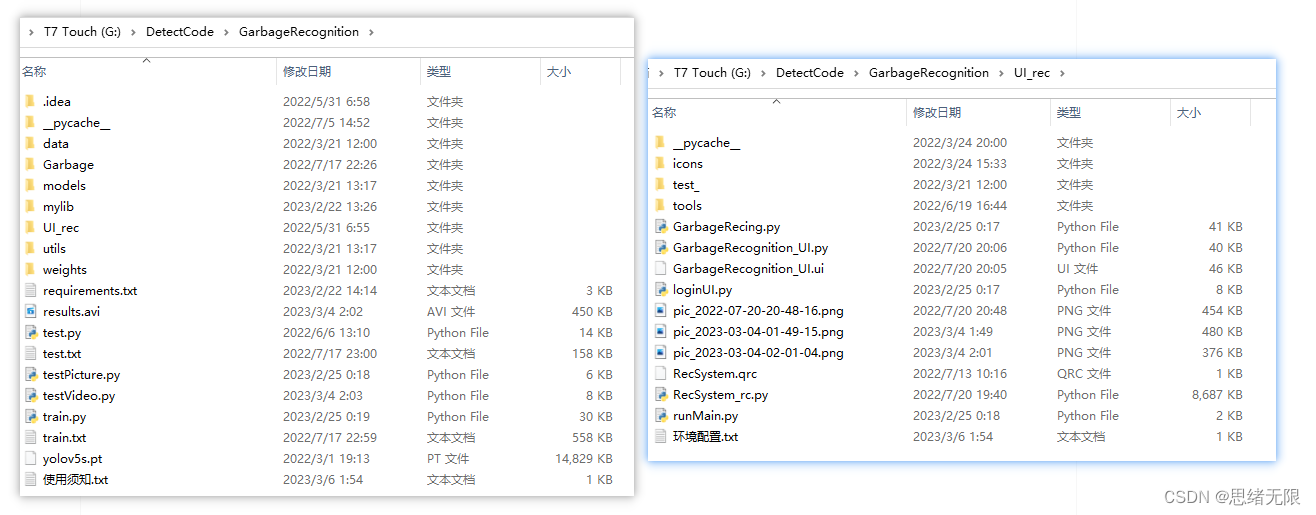
智能生活垃圾检测与分类系统(UI界面+YOLOv5+训练数据集)
摘要:智能生活垃圾检测与分类系统用于日常生活垃圾的智能监测与分类,通过图片、视频和摄像头识别生活垃圾,对常见的可降解、纸板、玻璃、金属、纸质和塑料等类别垃圾进行检测和计数,以协助垃圾环保分类处理。本文详细介绍基于YOLO…...

建立农村污水处理设施已经成为了当务之急!
在现代社会中,随着城市化进程的加速和人口的增长,选择农村污水处理设备进行污水处理已经成为了一个非常重要的问题。虽然城市中的污水处理设施得到了很好的发展,但是农村地区的污水处理还存在很多问题。 在农村地区,由于缺乏污水…...
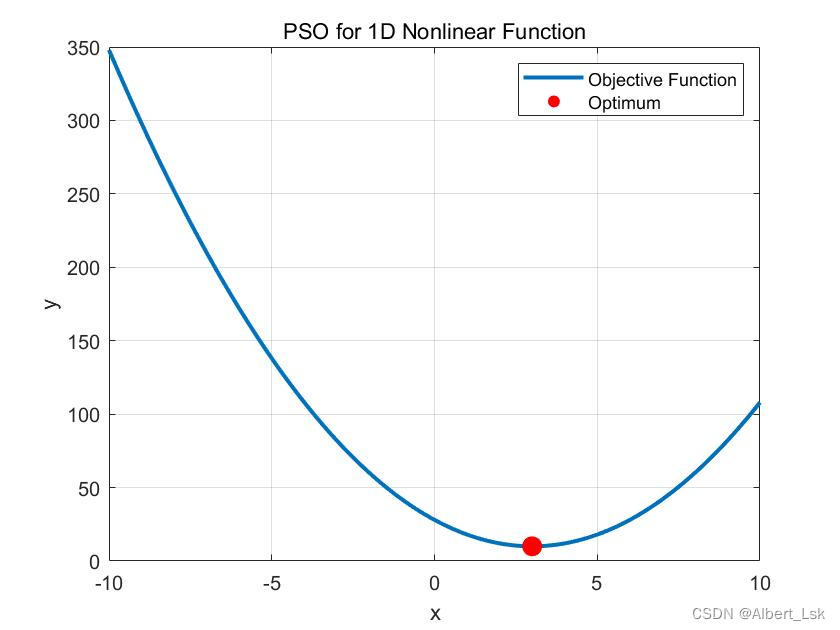
【Matlab算法】粒子群算法求解一维线性函数问题(附MATLAB代码)
MATLAB求解一维线性函数问题前言正文函数实现可视化处理可视化结果前言 一维线性函数,也称为一次函数,是指只有一个自变量xxx的函数,且函数表达式可以写成yaxbyaxbyaxb的形式,其中aaa和bbb是常数。具体来说,aaa称为斜…...

【JavaEE】Thread 类及常用方法
一、Thread 类Thread 类我们可以理解为是 java 用于管理线程的一个类,里面封装了操作系统提供的线程管理这一方面的 API (Thread 是优化后的结果), Java 代码创建的每一个线程,可以理解为为 Thread 实例化的对象,Threa…...
C语言数据结构初阶(7)----队列
CSDN的uu们,大家好。这里是C语言数据结构的第七讲。 目标:前路坎坷,披荆斩棘,扶摇直上。 博客主页:姬如祎队列的基础知识队列(queue)是只允许在一端进行插入操作,而在另一端进行删除…...

代码随想录二刷 day01 | 704. 二分查找 27. 移除元素 977. 有序数组的平方
代码随想录二刷day01704. 二分查找27. 移除元素977. 有序数组的平方704. 二分查找 题目链接 做这种题最好现在纸上写一写,如果在大脑中想,可能一会就晕了。 二刷的时候发现了一个新的知识点 即: >>的作用 二分法第二种写法:…...
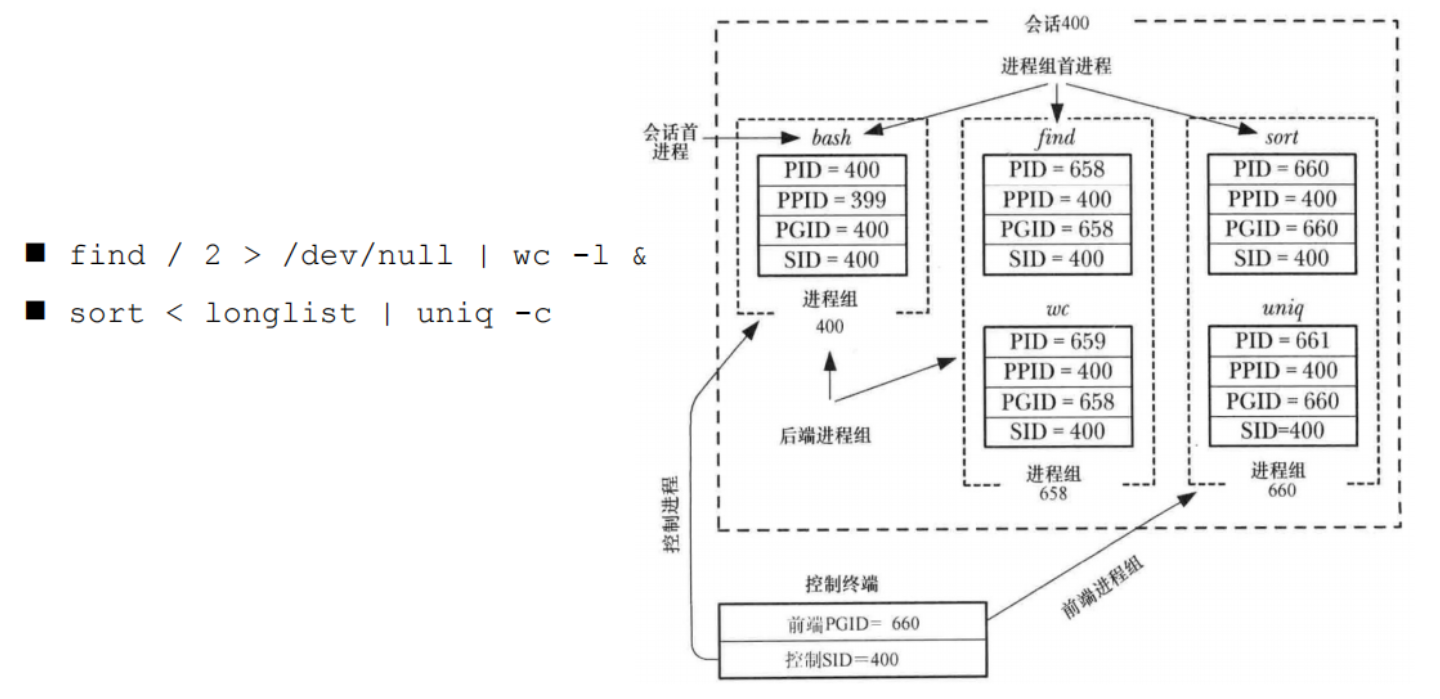
Linux 终端、进程组、会话、守护进程
文章目录一、终端概念终端概念控制终端二、进程组概念进程组概述进程组相关 API会话会话概念会话相关 API创建会话注意事项守护进程守护进程介绍守护进程模型守护进程参考代码守护进程相关 API参考文章一、终端概念 终端概念 1、终端(Terminal) 终端是…...
你是否有潜质成为谷歌开发者专家?加入 GDE 成长计划,释放潜力!
谷歌开发者专家 (Google Developer Experts,GDE),又称谷歌开发者专家项目,是由一群经验丰富的技术专家、具有社交影响力的开发者和思想领袖组成的全球性社区。通过在各项活动演讲以及各个平台上发布优质内容来积极助力开发者、企业和技术社区…...
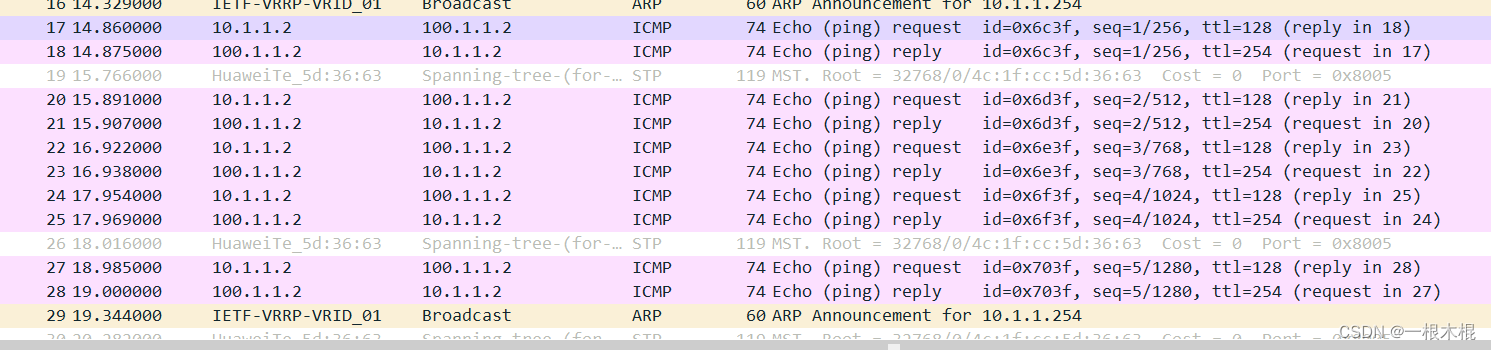
安全防御之防火墙篇(二)
目录 1.防火墙如何处理双通道协议? 2.防火墙如何处理NAT? 3.防火墙支持哪些NAT技术,主要应用的场景是什么? 4.当内网PC通过公网域名解析访问内网服务器的时候,会存在什么问题,如何解决?请详细…...

设计必备,5个png免抠素材网站,建议收藏
做设计、PPT都需要用到大量的免抠素材,职场中熟练使用Photoshop的人毕竟是少数,也很少有人愿意花费时间去精细抠图。那这5个免抠素材网站一定要收藏好,可以有效帮你节省时间,提高工作效率。 1、菜鸟图库 https://www.sucai999.co…...

shell 脚本expect
expect 是什么 expect - programmed dialogue with interactive programs(与互动程序进行程序对话) 定义脚本执行的 shell #!/usr/bin/expect -f 定义的是执行 expect 可执行文件的链接路径(或真实路径),功能类似于bas…...
第十九天 Maven总结
目录 Maven 1. 前言 2. 概述 2.1 介绍 2.2 安装 3. IDEA集成Maven 3.1 集成Maven环境 3.2 创建Maven项目 3.3 Maven坐标详解 3.4 导入maven项目 4. 依赖管理 4.1 依赖配置 4.2 依赖传递 4.3 依赖范围 4.4 生命周期 4.5 插件 Maven 1. 前言 1). 什么是Maven? …...

ESP8266-NodeMCU开发板-------开发板介绍(1)
目录 认识ESP8266-NodeMCU开发板编辑 GPIO编号与NodeMCU开发板引脚名的区别: ESP8266 GPIO编号与NodeMCU开发板引脚名的对应关系 可用引脚 电压电流限制 特殊引脚情况说明 上拉电阻/下拉电阻 模拟输入 通讯 认识ESP8266-NodeMCU开发板 初识NodeMCU开发板 (第1章-第…...

LibreCAD:完全免费的2D CAD软件终极指南,告别昂贵许可证
LibreCAD:完全免费的2D CAD软件终极指南,告别昂贵许可证 【免费下载链接】LibreCAD LibreCAD is a cross-platform 2D CAD program written in C17. It can read DXF/DWG files and can write DXF/PDF/SVG files. It supports point/line/circle/ellipse…...

Excel 根据A列标签拆分为多个列数据
举例:如下图所示将AB列内容拆分为红色框内的格式方便绘制图表Sub SplitCategoriesToColumns()Dim ws As WorksheetDim lastRow As LongDim startRow As LongDim dict As ObjectDim keyOrder As New CollectionDim i As Long, j As LongDim key As VariantDim val As…...
)
别再只会用Arduino了!用ESP8266+MicroPython快速搭建你的第一个物联网小项目(附完整代码)
用MicroPython解锁ESP8266的物联网潜能:10分钟搭建温湿度监测系统 当提到物联网开发时,大多数人的第一反应可能是Arduino和C。但今天,我要带你体验一种更高效、更友好的方式——MicroPython。这种基于Python的嵌入式编程语言,让物…...
)
Doris集群部署避坑指南:3FE+3BE配置全流程(含Java环境配置与常见问题解决)
Doris集群部署实战:3FE3BE高可用架构搭建与深度调优 在企业级数据分析场景中,Doris凭借其出色的实时分析性能和高并发处理能力,已成为众多企业的首选OLAP引擎。本文将基于3FE(Frontend)3BE(Backend…...
)
VisualGDB跨平台调试避坑指南:用VS远程调试Linux程序(2023最新版配置)
VisualGDB跨平台调试实战:2023年VS远程开发Linux程序避坑指南 当Visual Studio开发者首次尝试在Linux环境下进行C开发时,往往会面临调试工具链断裂的困境。传统的gdb命令行调试方式与Windows开发者熟悉的图形化调试体验存在巨大鸿沟,而Visual…...

VS Code高效调试:自定义console.log快捷键与智能代码片段配置
1. 为什么需要自定义console.log快捷键? 每次调试JavaScript代码时,手动输入完整的console.log语句实在是一件让人抓狂的事情。想象一下这样的场景:你正在调试一个复杂的Vue组件,需要快速查看某个变量的值。按照传统方式…...
)
保姆级教程:用Python+OpenCV搞定汽车360全景拼接(附C++移植思路)
从零构建汽车360全景系统:PythonOpenCV实战与C工程化指南 当你第一次坐上驾驶座,启动车辆时,中控屏上突然展现出车辆周围无死角的鸟瞰视图——这就是现代汽车360全景系统带来的神奇体验。作为提升驾驶安全性和便利性的关键技术,它…...

解锁5大跨平台无线控制能力:QtScrcpy全方位使用指南
解锁5大跨平台无线控制能力:QtScrcpy全方位使用指南 【免费下载链接】QtScrcpy Android实时投屏软件,此应用程序提供USB(或通过TCP/IP)连接的Android设备的显示和控制。它不需要任何root访问权限 项目地址: https://gitcode.com/barry-ran/QtScrcpy …...

League-Toolkit:3大核心价值的英雄联盟智能辅助工具
League-Toolkit:3大核心价值的英雄联盟智能辅助工具 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit League-Toolkit 是一款基于英雄…...

4步精通开源SMU调试工具:AMD Ryzen处理器深度配置与性能调优全攻略
4步精通开源SMU调试工具:AMD Ryzen处理器深度配置与性能调优全攻略 【免费下载链接】SMUDebugTool A dedicated tool to help write/read various parameters of Ryzen-based systems, such as manual overclock, SMU, PCI, CPUID, MSR and Power Table. 项目地址…...