BFS实现迷宫最短路径
结合队列的知识利用 广度优先遍历,通过对能走的路径的记录以及对走过路径的标记,进行多条路搜查
一、理论基础
如下图的迷宫:

选取所走方向(针对某一个位置)下,右,上,左,从起点(0,0)开始进行广度搜索,标记(0,1)走过,重复寻路,直到走到终点
如图:

通过一个点找到所有与该顶点相连且能走的顶点,不停寻找,直到找到目的地或走完所有能走的点为止,图中可以看到
任意一个顶点只有一个前驱,可以通过某种方式记录该顶点的前驱,一步步回到原点,并记录移动轨迹,最终得到从起点到终点最短路径的数组
步骤:
1)起点入队
2)队头出队,
3)找到所有与队头相连且为空地的点,将这些点都入队,并记录这些点的前驱
4)重复执行步骤2)3),直到队列为空
5)通过终点一步步回到前驱,最终回到终点,得到最短路径\
二、代码实现
C语言代码实现如下:
① 定义坐标结构体
typedef struct
{int row; //行int col; //列
}Position;② 定义队列结构及操作
typedef struct
{Position*queue; //队列int front; //头部int rear; //尾部int cap; //队列容量
}MyQueue;//判断队列是否已满
bool IsEmpty(MyQueue*myqueue)
{if(myqueue->front==myqueue->rear)return true;elsereturn false;
}
//弹出队头
Position PopFront(MyQueue*myqueue)
{Position p=myqueue->queue[myqueue->front];myqueue->front=(myqueue->front+1)%myqueue->cap;return p;
}
//插入队尾
void PushRear(MyQueue*myqueue,Postion p)
{myqueue->queue[myqueue->rear]=p;myqueue->rear=(myqueue->rear+1)%myqueue->cap;
}③ 设置移动方向
//移动方向
int orient[4][2]={{1,0},{0,1},{-1,0},{0,-1}//下 右 上 左
}④ 开始广度寻路
//0代表空地,1代表墙
void ShortestPath_BFS(int**maze,int maze_row,int maze_col,Position start,Position destination)
{//创建队列MyQueue*myqueue=CreatMyQueue(maze_row*maze*col);/*创建vt数组,标记某些点是否走过,0代表未走过,非0代表走过(1代表该点的前驱在该点下方,2代表该点的前驱在该点右边,3代表上,4代表左)*/int vt[maze_row][maze_col];memset(vt,0,sizeof(vt)); //对所有点初始化标记为未走过PushRear(myqueue,start); //起点入队vt[start.row][start.col]=5; //标记起点已走过,5代表起点位置while(!IsEmpty(myqueue)){Position temp=PopFront(myqueue); //队头出队//找到与出队顶点相连且为空地的所有顶点入队for(int ori=0;ori<4;ori++){//定义试探点int newRow=temp.row+orient[i][0];int newCol=temp.col+orient[i][1];//判断试探点是否能走if(newRow>=0&&newRow<maze_row&&newCol>=0&&newCol<maze_col&&maze[newRow][newCol]==0&&vt[newRow][newCol]==0)//不越界,且为空地,未走过{//该点入队Position p;p.row=newRow;p.col=newCol;PushRear(queue,p);//标记该点走过,记录该点前驱方向vt[newRow][newCol]=(ori+2)%4+1;}}}//定义路径数组Position*path=malloc(sizeof(Position)*maze_row*maze_col);int path_size=0;//通过终点回到前驱,直到回到起点,记录其移动轨迹int curRow=destination.row;int curCol=destination.col;while(vt[curRow][curCol]!=5){path[path_size].row=curRow;path[path_size].col=curCol;path_size++;int ori=vt[curRow][curCol]-1;//前驱点相对于该点的方向在orient数组中的位置curRow+=orient[ori][0]; //前驱点的行curCol+=orient[ori][1]; //前驱点的列}//将起点位置存入路径数组path[path_size].row=start.row;path[path_size].col=start.col;path_size++;//展示从起点开始到终点的路径for(int i=path_size-1;i>=0;i--){printf("(%d,%d)"path[i].row,path[i].col);if(i!=0)printf("->");}
}
相关文章:
BFS实现迷宫最短路径
结合队列的知识利用 广度优先遍历,通过对能走的路径的记录以及对走过路径的标记,进行多条路搜查 一、理论基础 如下图的迷宫: 选取所走方向(针对某一个位置)下,右,上,左࿰…...

Linux IPC解析:匿名命名管道与共享内存
目录 一.IPC机制介绍二.匿名与命名管道1.匿名管道2.命名管道3.日志 三.共享内存三.System V 标准1.System V简介2.IPC在内核的数据结构设计3.信号量 一.IPC机制介绍 IPC(Inter-Process Communication,进程间通信)是计算机系统中不同进程之间交…...

Codeforces Round 964 (Div. 4) A~G
封面原图 画师ideolo A - AB Again? 题意 给你一个两位数,把他的个位和十位加起来 代码 #include <bits/stdc.h> using namespace std; typedef long long ll; typedef double db; typedef pair<int,int> pii; typedef pair<ll,ll> pll;voi…...

单体应用提高性能和处理高并发-使用缓存
要在单体应用中实现高并发,并利用缓存技术来提高性能,需要深入了解缓存的应用场景、选择合适的缓存工具,以及在具体代码中实现缓存策略。以下是详细说明如何在单体应用中使用缓存来处理高并发的内容,包括常见的缓存框架和实际的代…...

ollama教程——使用LangChain调用Ollama接口实现ReAct
ollama入门系列教程简介与目录 相关文章: Ollama教程——入门:开启本地大型语言模型开发之旅Ollama教程——模型:如何将模型高效导入到Ollama框架Ollama教程——兼容OpenAI API:高效利用兼容OpenAI的API进行AI项目开发Ollama教程——使用LangChain:Ollama与LangChain的强强…...

【Bug分析】Keil报错:error: #18:expected a “)“问题解决
【Bug分析】Keil报错:error: #18:expected a “)”问题解决 前言bug查找bug解决方法小结 前言 keil编译时出现一个问题,缺少一个右括号。然后仔细查看代码,并没有括号缺失。 如下,代码括号正常。 bug查找 站内文章…...

MAC上设置快捷打开终端以及如何运用剪切快捷键
在Mac上设置一个快捷键,在当前文件夹中打开终端,你可以使用Automator创建一个服务,然后将其分配给一个快捷键。以下是步骤: 1. 创建Automator服务 打开 Automator(你可以在应用程序文件夹中找到它,或使用…...

linux docker安装 gitlab后忘记root密码如何找回
1. docker ps - a 查看当前gitlab 当前的id2. docker exec -it gitlab /bin/bash 进入docker git 容器中【gitlab 注意可以上图中的name,也可以是id都可以的】,如下图3.gitlab-rails console -e production 输入该指令,启动Ruby on Rails控制台&…...

C语言典型例题27
《C程序设计教程(第四版)——谭浩强》 习题2.4 用下面的scanf函数输入数据 使a3,b7,x8.5,y71.8,c1A,c2a。问在键盘上怎么输入 代码 //《C程序设计教程(第四版)——谭浩强》 //习题2.4 用下面的scanf函数输入数据,使…...

clion开发stm32f4系列(一)————移植rt-thread os系统
前言 本次使用的rt-thread的版本为5.0.2基于rt-thread sudio生成的源码进行拷贝和修改工程基于上次创建工程的项目进行修改。本次工程只是用了serial和pin组件,其他后面用到再进行添加 拷贝rt-thread源码库 通过CMakeLists来进行管理 顶级(rt-thread目录) cmake_minimum_req…...

计算机网络(网络层)
网络层概述 网络层是干什么的? 网络层的主要任务是实现不同异构网络互连,进而实现数据包在各网络之间的传输相比于数据链路层的以太网通信,网络层则是将一个个数据链路层连接的以太网通过路由器连接起来。从而实现不同数据链路层的互联。 这…...

Python3 第六十六课 -- CGI编程
目录 一. 什么是 CGI 二. 网页浏览 三. CGI 架构图 四. Web服务器支持及配置 五. 第一个CGI程序 5.1. HTTP 头部 5.2. CGI 环境变量 六. GET和POST方法 6.1. 使用GET方法传输数据 6.1.1. 简单的url实例:GET方法 6.1.2. 简单的表单实例:GET方法…...

【Unity23种设计模式】之状态模式
首先创建一个项目 打开项目后复制至3个场景 命名为 创建一个空物体 命名为GameLoop 创建一个脚本GameLoop.cs 编写代码如下 将代码挂载至空物体GameLoop 将三个场景拖拽至Scenes In Build 分析下状态模式的类图 我们创新类图中的代码 编写ISceneState.cs 编写三个状态子类继承构…...

二叉树刷题,bfs刷题
有些题目,你按照拍脑袋的方式去做,可能发现需要在递归代码中调用其他递归函数计算字数的信息。一般来说,出现这种情况时你可以考虑用后序遍历的思维方式来优化算法,利用后序遍历传递子树的信息,避免过高的时间复杂度。…...

为什么要用分布式锁
单应用中,如果要确保多线程修改同一个资源的安全性 加synchronized就可以了 但是性能不高 而mybatis-plus的乐观锁就可以很好的解决这类问题 但是这样的锁机制,只在单应用中有效 试想,在分布式下,有没有可能出现多个应用中的线程同时去修改同一个数据资源的并发问题 例如A …...
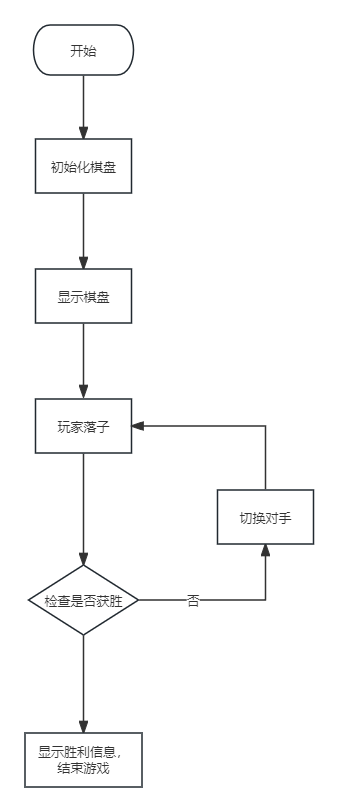
python游戏开发之五子棋游戏制作
五子棋是一种源自中国的传统棋类游戏,起源可以追溯到古代。它是一种两人对弈的游戏,使用棋盘和棋子进行。棋盘通常是一个 1515 的网格,棋子分为黑白两色,双方轮流在棋盘上落子。游戏的目标是通过在棋盘上落子,使自己的…...
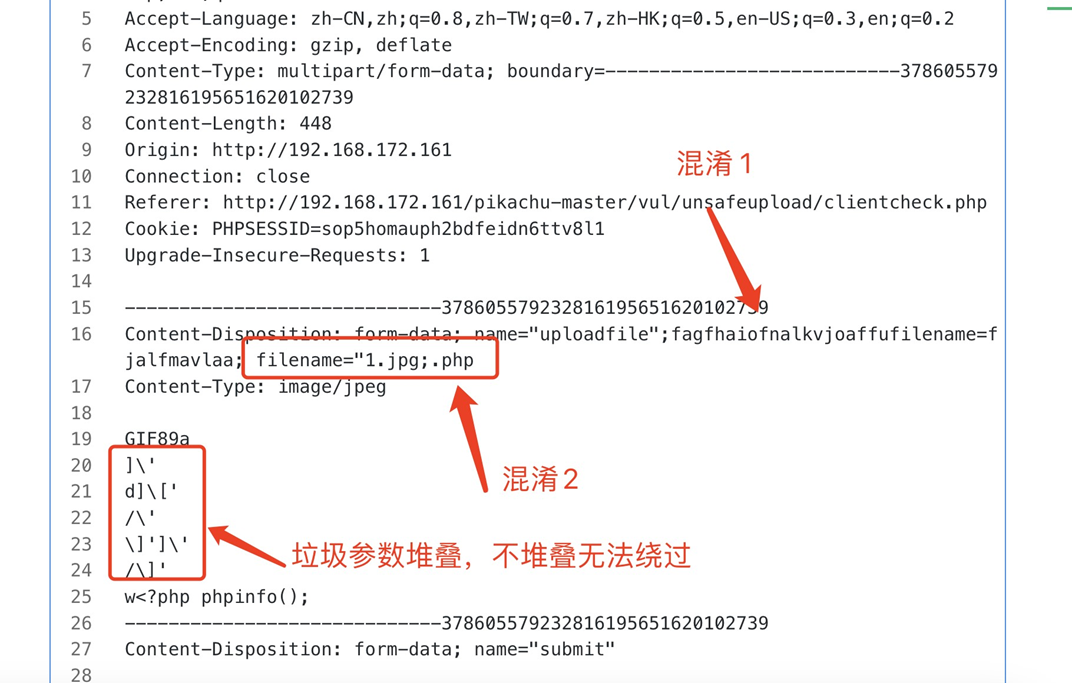
文件上传绕过最新版安全狗
本文来源无问社区,更多实战内容,渗透思路可前往查看http://www.wwlib.cn/index.php/artread/artid/9960.html http分块传输绕过 http分块传输⼀直是⼀个很经典的绕过⽅式,只是在近⼏年分块传输⼀直被卡的很死,很多waf都开始加 …...

常用API_2:应用程序编程接口:ArrayList
文章目录 ArrayList常用方法 案例 :上菜 ArrayList 常用方法 来自黑马程序员学习视频 案例 :上菜 待完善...

【Linux操作系统】进程的基本概念(PCB对象)详解
目录 一、进程的基本概念二、进程的描述组织(PCB对象)1.PCB的基本概念2.为什么要有PCB对象(操作系统对进程的组织管理)3.PCB对象的内部属性(tast_struct结构体) 三、查看进程1.ps指令2.top指令3.通过 /proc…...

曙光宁畅中科可控所有服务器机型出厂默认IPMI用户密码
机型 默认IP 用户名/密码 通用 SG机型 DHCP admin/admin 通用 KK机型 DHCP admin/admin 通用 NC 机型 DHCP Admin/Admin5000 I420-G10、I620-G15、I650-G15、I840-GS、I840-G10、I840-G25、I980-G10、A420r-G、A620r-G、A840-G10、TC4600刀片、TC46…...

FigmaCN实战指南:3步实现Figma界面全中文化,提升设计师工作效率70%
FigmaCN实战指南:3步实现Figma界面全中文化,提升设计师工作效率70% 【免费下载链接】figmaCN 中文 Figma 插件,设计师人工翻译校验 项目地址: https://gitcode.com/gh_mirrors/fi/figmaCN FigmaCN是一款专为中文设计师打造的开源浏览器…...

Windows电脑如何直接运行安卓应用?APK Installer终极解决方案揭秘
Windows电脑如何直接运行安卓应用?APK Installer终极解决方案揭秘 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 还在为手机和电脑之间的应用壁垒而烦恼吗…...

3个理由告诉你,为什么Mac用户需要Turbo Boost Switcher这个终极性能控制工具
3个理由告诉你,为什么Mac用户需要Turbo Boost Switcher这个终极性能控制工具 【免费下载链接】Turbo-Boost-Switcher Turbo Boost disabler / enable app for Mac OS X 项目地址: https://gitcode.com/gh_mirrors/tu/Turbo-Boost-Switcher Turbo Boost Switc…...

8款热门数据治理工具深度测评,哪款功能最强大?
业务要报表,数据散在 ERP、CRM、Excel 十几个系统里,跨部门取数要等好几天。好不容易凑齐数据,财务和业务口径不一致,核心指标算出来两个数。数据越多越混乱,找数据比用数据难,这些问题都是因为数据治理没做…...

微信API开发指南:从入门到精通
本文介绍WTAPI微信API开发框架的核心功能和应用场景一、微信API开发的技术挑战在企业级微信应用开发中,开发者面临以下核心挑战:1. 技术门槛高需要深入了解微信协议,处理复杂的登录流程和消息机制,对开发人员的技术要求较高。2. 功…...

苹果设备激活锁绕过:如何合法解锁iOS 15-16设备的完整指南
苹果设备激活锁绕过:如何合法解锁iOS 15-16设备的完整指南 【免费下载链接】applera1n icloud bypass for ios 15-16 项目地址: https://gitcode.com/gh_mirrors/ap/applera1n 在iOS设备管理中,激活锁(Activation Lock)是苹…...

NCM音频文件终极解密指南:3步解锁网易云音乐,实现跨设备自由播放
NCM音频文件终极解密指南:3步解锁网易云音乐,实现跨设备自由播放 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 你是否曾为网易云音乐的NCM加密文件而烦恼?下载的音乐只能在特定设备播放…...

AI Agent设计实战:基于千问3.5-9B构建自主任务执行智能体
AI Agent设计实战:基于千问3.5-9B构建自主任务执行智能体 1. 智能体时代的业务自动化新范式 想象一下这样的场景:市场部门需要每周生成一份行业趋势分析报告。传统流程需要人工收集数据、整理信息、分析趋势、撰写报告,整个过程耗时费力。而…...

VideoDownloadHelper:突破流媒体下载壁垒的智能解析工具
VideoDownloadHelper:突破流媒体下载壁垒的智能解析工具 【免费下载链接】VideoDownloadHelper Chrome Extension to Help Download Video for Some Video Sites. 项目地址: https://gitcode.com/gh_mirrors/vi/VideoDownloadHelper VideoDownloadHelper是一…...

Awoo Installer:Switch游戏安装全场景解决方案的技术突破与实践指南
Awoo Installer:Switch游戏安装全场景解决方案的技术突破与实践指南 【免费下载链接】Awoo-Installer A No-Bullshit NSP, NSZ, XCI, and XCZ Installer for Nintendo Switch 项目地址: https://gitcode.com/gh_mirrors/aw/Awoo-Installer Awoo Installer作为…...