手把手教你使用--常用模块--HC05蓝牙模块,无线蓝牙串口透传模块,(实例:手机蓝牙控制STM32单片机点亮LED灯)
最近在学STM32,基本的学完了,想学几个模块来巩固一下知识,就想到了蓝牙模块。玩啥好难过有很多博客教怎么连的,但自己看起来还是有点糊涂。模块的原理和知识点我就不讲解了,这里我主要手把手记录一下我是如何对蓝牙模块进行学习和使用的。
所使用的资料和工具我会放在最后的链接里,大家有需要的可以自行下载。
模块名称:HC-05蓝牙串口通信模块
其他模块:USB转TTL模块、杜邦线、蓝牙串口助手app
蓝牙模块的前期调试
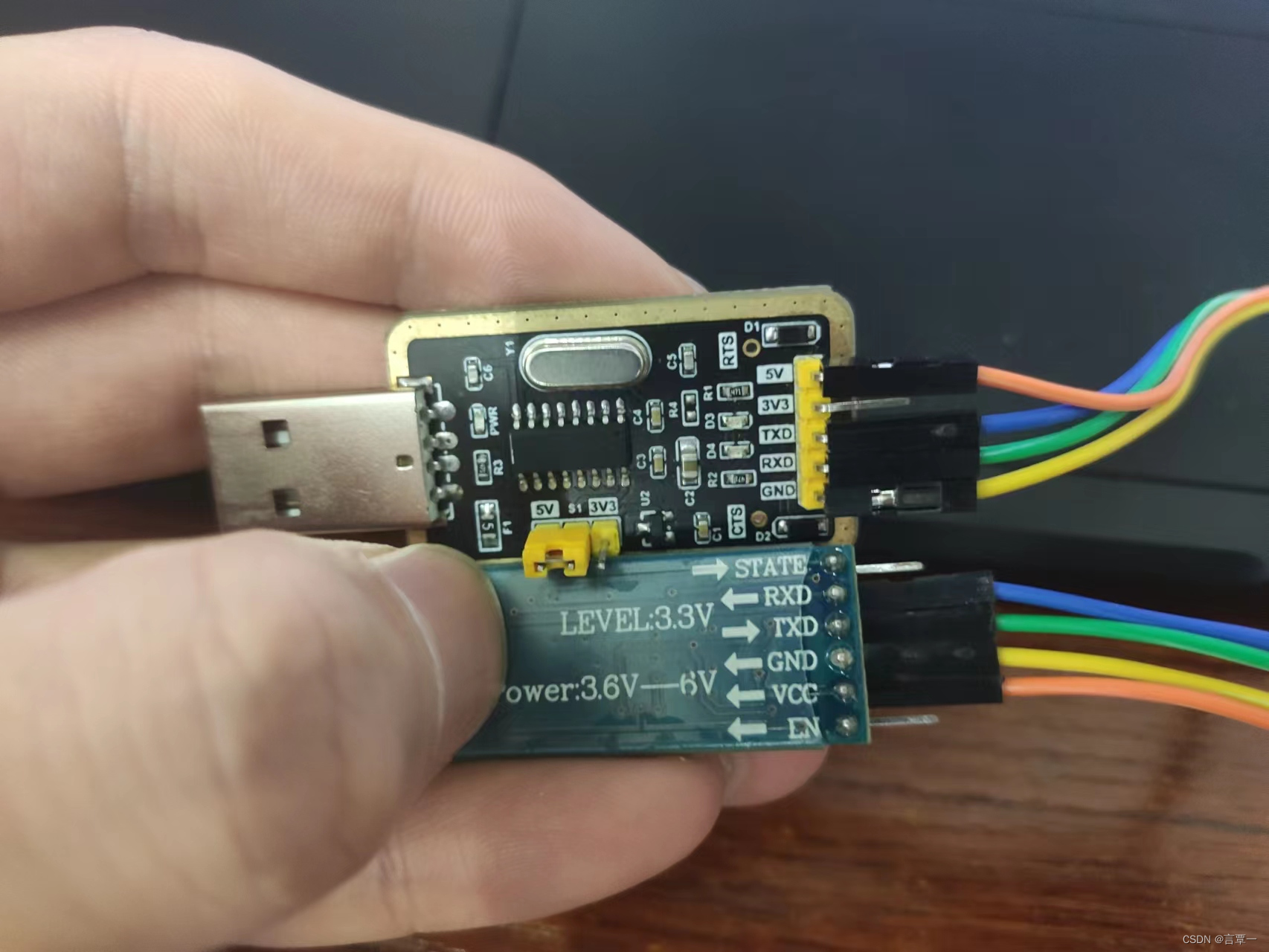
因为我们只是使用到蓝牙模块的透传功能,只需要用到4个引脚(RXT、TXD、GND、VCC)
先使用杜邦线将USB转TTL模块和HC-05蓝牙模块相连
两模块共电、共地、两模块的TX和RX交换相接(USB转TTL的TX(RX)接蓝牙的RX(TX))
如图所示:
然后将USB转TTL模块插到电脑上,通过串口助手进行调试。
蓝牙模块通讯模式有两种工作方式:命令响应工作模式和自动连工作模式(在自动连接工作模式下又可分为主、从和回环三种角色)
·当模块处于自动连接工作模式时,将自动根据事先设定的方式连接的数据传输;
·当模块处于命令响应工作模式时能执行AT命令,用户可向模块发送各种AT 指令,为模块设定控制参数或发布控制命令。
如何进入命令响应:
给模块上电即插USB的时候,按住蓝牙HC-05模块的那个小按键,此时模块进入AT模式
蓝牙模块上有一个小灯,灯快闪的时候,就是自动连接模式。慢闪的时候,就是命令响应工作模式
命令响应模式的波特率固定为38400,可以直接使用串口助手发送AT指令。
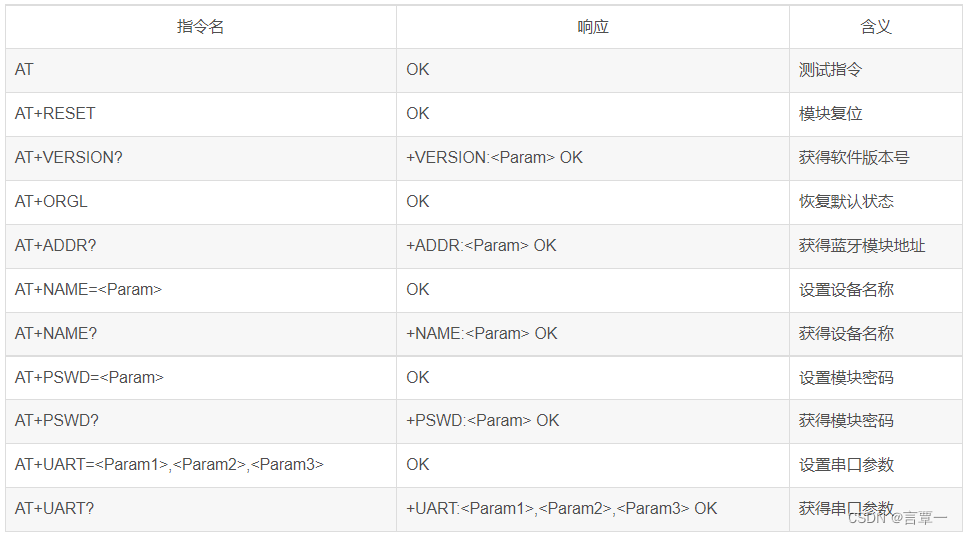
AT命令
AT指令不区分大小写,但是都要以回车符结尾
下面是常用的AT指令
注意:AT+NAME?可能是没有返回数据的,我们直接设置蓝牙名称就可以了
我们接下来主要配置的就是
蓝牙名称和串口参数(波特率、停止位、校验位)
如图:

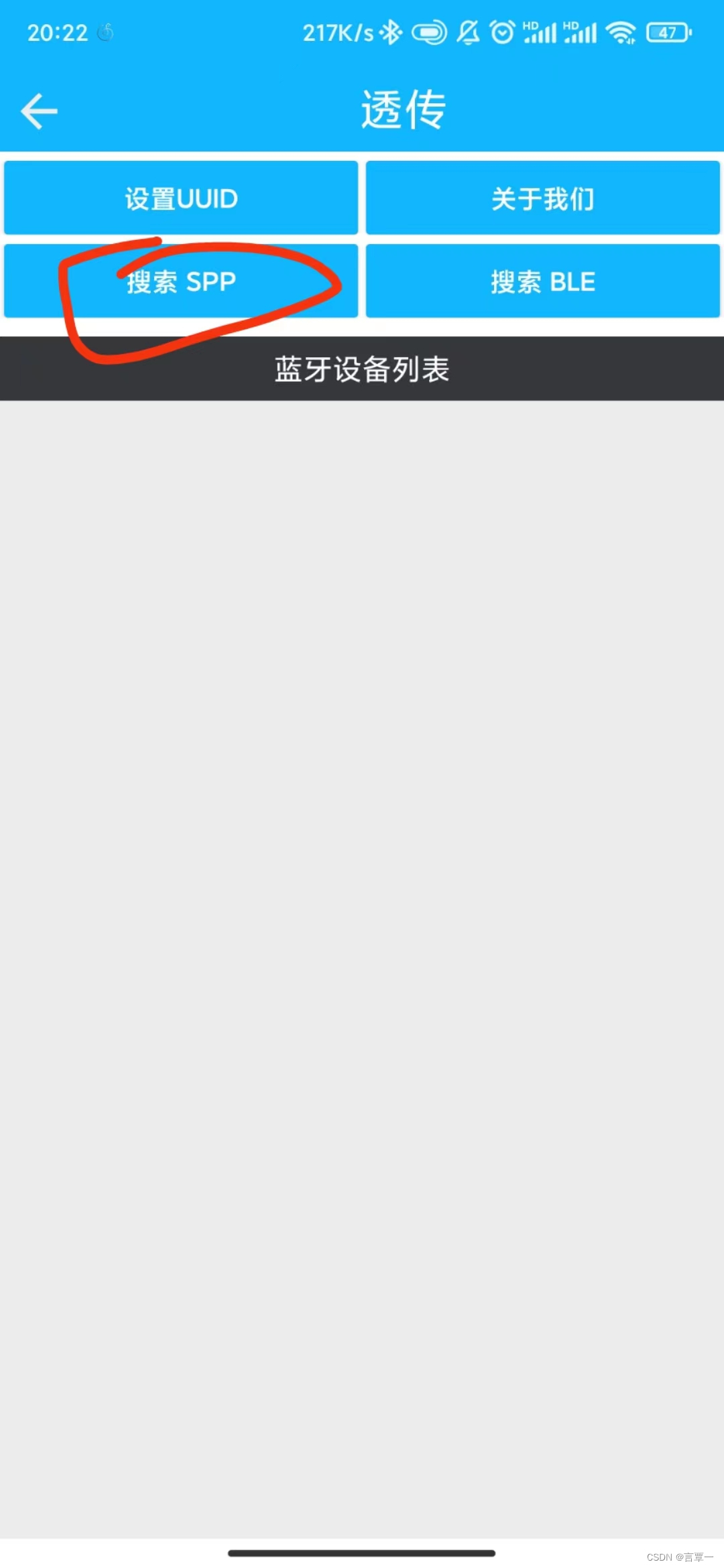
设置好之后把usb拔下来,重新上电的时候会默认为自动连接模式,此时使用手机的蓝牙助手对蓝牙模块进行连接,就可以通讯了。蓝牙助手我也会放在后面的资料链接里。

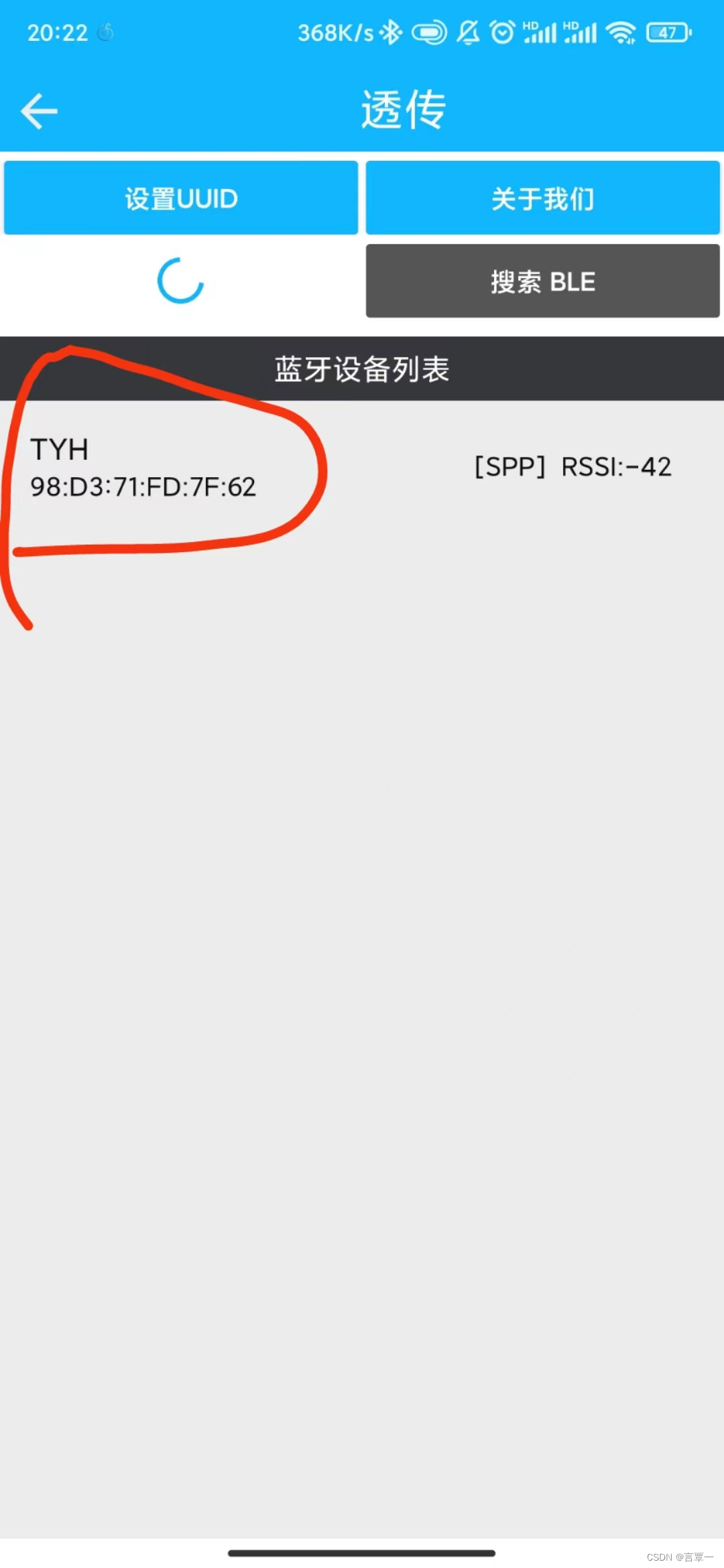
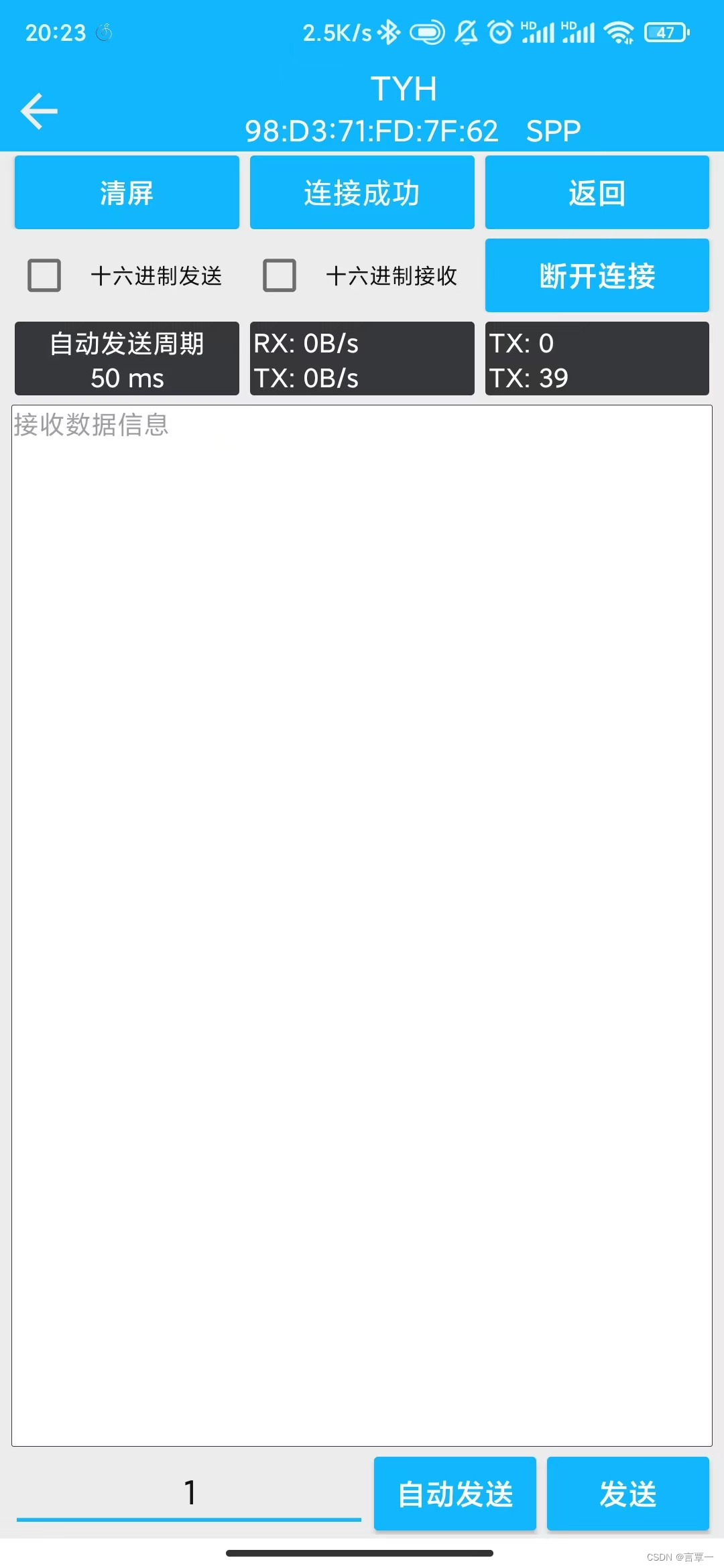

将串口助手波特率设置为115200,在手机蓝牙中发送信息,会在串口助手中显示出来。
最后,我们将在STM32开发板中连接蓝牙进行信息传输,控制LED灯
源码我将会放在后面的资料里一起打包。
这里我们使用串口1,因为串口1是我开发板的下载串口,所以要先下载代码之后再连接蓝牙模块的TX和RX,如果使用其他串口进行通讯改为其他串口即可,连接方式如图所示:
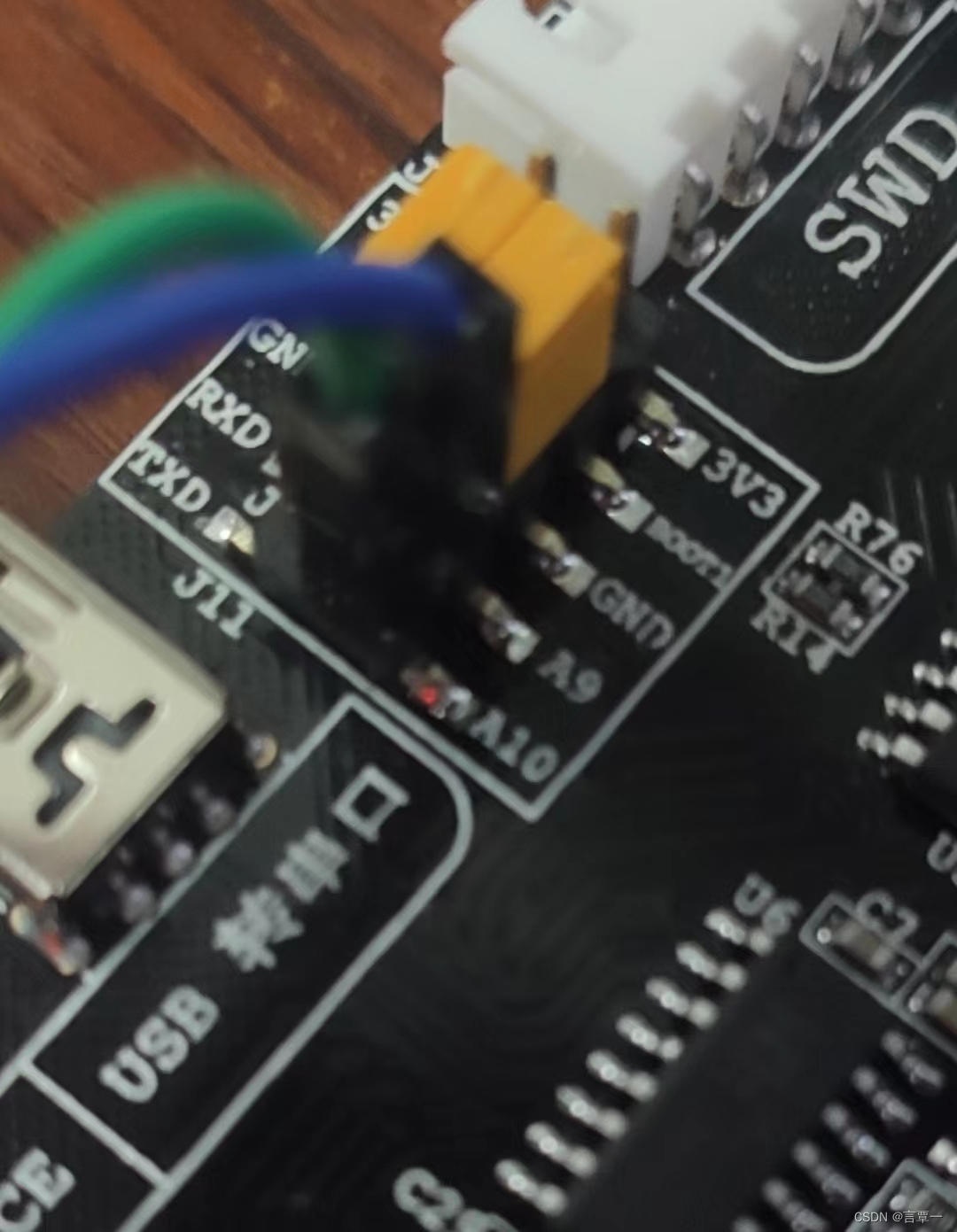
蓝牙模块的RX连PA9,TX连PA10,VCC接板载的5V,GND接板子的GND即可
由于我使用的是野火的开发板,所用到的LED灯是个RGB灯,大家只需要初始化一下串口,然后看一下main函数里面的逻辑来实现自己板子的LED灯即可。也可以在中断函数里对灯进行操作
接下来就可以举一反三,使用蓝牙返回信息等操作了。
资料有需要自行提取:链接:https://pan.baidu.com/s/1iGrbTiivAsTwzd9wDLYFaQ
提取码:3sp6
资料里面还有一个HC蓝牙助手,可以自定义按钮发送信息。
串口控制LED灯的代码如下:
usart.c:
#include "bsp_usart.h"//static void NVIC_Configuration(void) //配置中断优先级,这里不使用中断,所以屏蔽
//{
// NVIC_InitTypeDef NVIC_InitStructure;
//
// /* 嵌套向量中断控制器组选择 */
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//
// /* 配置USART为中断源 */
// NVIC_InitStructure.NVIC_IRQChannel = DEBUG_USART_IRQ;
// /* 抢断优先级*/
// NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
// /* 子优先级 */
// NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
// /* 使能中断 */
// NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
// /* 初始化配置NVIC */
// NVIC_Init(&NVIC_InitStructure);
//}void USART_Config(void)
{GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;// 打开串口GPIO的时钟
#include "stm32f10x.h" // Device headerDEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);// 打开串口外设的时钟DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);// 将USART Tx的GPIO配置为推挽复用模式
#include "stm32f10x.h" // Device headerGPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);// 将USART Rx的GPIO配置为浮空输入模式GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);// 配置串口的工作参数// 配置波特率USART_InitStructure.USART_BaudRate = DEBUG_USART_BAUDRATE;// 配置 针数据字长USART_InitStructure.USART_WordLength = USART_WordLength_8b;// 配置停止位USART_InitStructure.USART_StopBits = USART_StopBits_1;// 配置校验位USART_InitStructure.USART_Parity = USART_Parity_No ;// 配置硬件流控制USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;// 配置工作模式,收发一起USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;// 完成串口的初始化配置USART_Init(DEBUG_USARTx, &USART_InitStructure);// // 串口中断优先级配置
// NVIC_Configuration();
//
// // 使能串口接收中断
// USART_ITConfig(DEBUG_USARTx, USART_IT_RXNE, ENABLE); // 使能串口USART_Cmd(DEBUG_USARTx, ENABLE);
}/* 发送一个字节 */
void Usart_SendByte(USART_TypeDef* pUSARTx, uint8_t data)
{USART_SendData(pUSARTx, data);while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
}/* 发送两个字节的数据 */
void Usart_SendHalfWord(USART_TypeDef* pUSARTx, uint16_t data)
{uint8_t temp_h,temp_l;temp_h = (data&0xff00) >> 8 ;temp_l = data&0xff;USART_SendData(pUSARTx, temp_h);while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );USART_SendData(pUSARTx, temp_l);while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET );
}/* 发送8位数据的数组 */
void Usart_SendArray(USART_TypeDef* pUSARTx, uint8_t *array,uint8_t num)
{uint8_t i;for( i=0; i<num; i++ ){Usart_SendByte(pUSARTx, array[i]);}while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET );
}/* 发送字符串 */
void Usart_SendStr(USART_TypeDef* pUSARTx, uint8_t *str)
{uint8_t i=0;do{Usart_SendByte(pUSARTx, *(str+i));i++;}while(*(str+i) != '\0');while( USART_GetFlagStatus(pUSARTx, USART_FLAG_TC) == RESET );
}///重定向c库函数printf到串口,重定向后可使用printf函数
int fputc(int ch, FILE *f)
{/* 发送一个字节数据到串口 */USART_SendData(DEBUG_USARTx, (uint8_t) ch);/* 等待发送完毕 */while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET); return (ch);
}///重定向c库函数scanf到串口,重写向后可使用scanf、getchar等函数
int fgetc(FILE *f)
{/* 等待串口输入数据 */while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);return (int)USART_ReceiveData(DEBUG_USARTx);
}
main.c
int main(void)
{ uint8_t ch;USART_Config();LED_GPIO_Config();printf( "这是一个串口控制RGB灯的程序\n" );while (1){ch = getchar();printf( "ch=%c\n",ch );switch(ch){case '1': LED_RED;break;case '2': LED_GREEN;break;case '3': LED_BLUE;break;default: LED_RGBOFF;break;}}
}led.c
#include "bsp_led.h" /*** @brief 初始化控制LED的IO* @param 无* @retval 无*/
void LED_GPIO_Config(void)
{ /*定义一个GPIO_InitTypeDef类型的结构体*/GPIO_InitTypeDef GPIO_InitStructure;/*开启LED相关的GPIO外设时钟*/RCC_APB2PeriphClockCmd( LED1_GPIO_CLK | LED2_GPIO_CLK | LED3_GPIO_CLK, ENABLE);/*选择要控制的GPIO引脚*/GPIO_InitStructure.GPIO_Pin = LED1_GPIO_PIN; /*设置引脚模式为通用推挽输出*/GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; /*设置引脚速率为50MHz */ GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; /*调用库函数,初始化GPIO*/GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStructure); /*选择要控制的GPIO引脚*/GPIO_InitStructure.GPIO_Pin = LED2_GPIO_PIN;/*调用库函数,初始化GPIO*/GPIO_Init(LED2_GPIO_PORT, &GPIO_InitStructure);/*选择要控制的GPIO引脚*/GPIO_InitStructure.GPIO_Pin = LED3_GPIO_PIN;/*调用库函数,初始化GPIOF*/GPIO_Init(LED3_GPIO_PORT, &GPIO_InitStructure);/* 关闭所有led灯 */GPIO_SetBits(LED1_GPIO_PORT, LED1_GPIO_PIN);/* 关闭所有led灯 */GPIO_SetBits(LED2_GPIO_PORT, LED2_GPIO_PIN); /* 关闭所有led灯 */GPIO_SetBits(LED3_GPIO_PORT, LED3_GPIO_PIN);
}/*********************************************END OF FILE**********************/
相关文章:
手把手教你使用--常用模块--HC05蓝牙模块,无线蓝牙串口透传模块,(实例:手机蓝牙控制STM32单片机点亮LED灯)
最近在学STM32,基本的学完了,想学几个模块来巩固一下知识,就想到了蓝牙模块。玩啥好难过有很多博客教怎么连的,但自己看起来还是有点糊涂。模块的原理和知识点我就不讲解了,这里我主要手把手记录一下我是如何对蓝牙模块…...

MyBatis高频面试题
目录 1、Mybatis中#和$的区别 2、Mybatis的编程步骤是什么样的 3...
Redis基础篇
redis的三大特点: 支持多数据类型,支持持久化,单线程 多路IO复用 对键操作的命令: keys * 查看当前库所有key exists key 判断key是否存在 del key 删除 unlink key 非阻塞删除,异步删除 expire key …...

unity的C#学习——静态常量和动态常量的定义与使用
定义常量 在C#中,常量是一种不可改变的量,一旦被定义,其值就不能被修改。C#中有两种类型的常量,静态常量和动态常量。 1、静态常量的定义 静态常量是在编译时就已经确定其值的常量,使用const关键字定义。由于在编译…...
栈----数据结构
栈🔆栈的概念🔆栈的结构🔆栈的实现🔆括号匹配问题🔆结语🔆栈的概念 栈:一种特殊的线性表,其只允许在固定的一端进行插入和删除元素操作。**进行数据插入和删除操作的一端称为栈顶&am…...
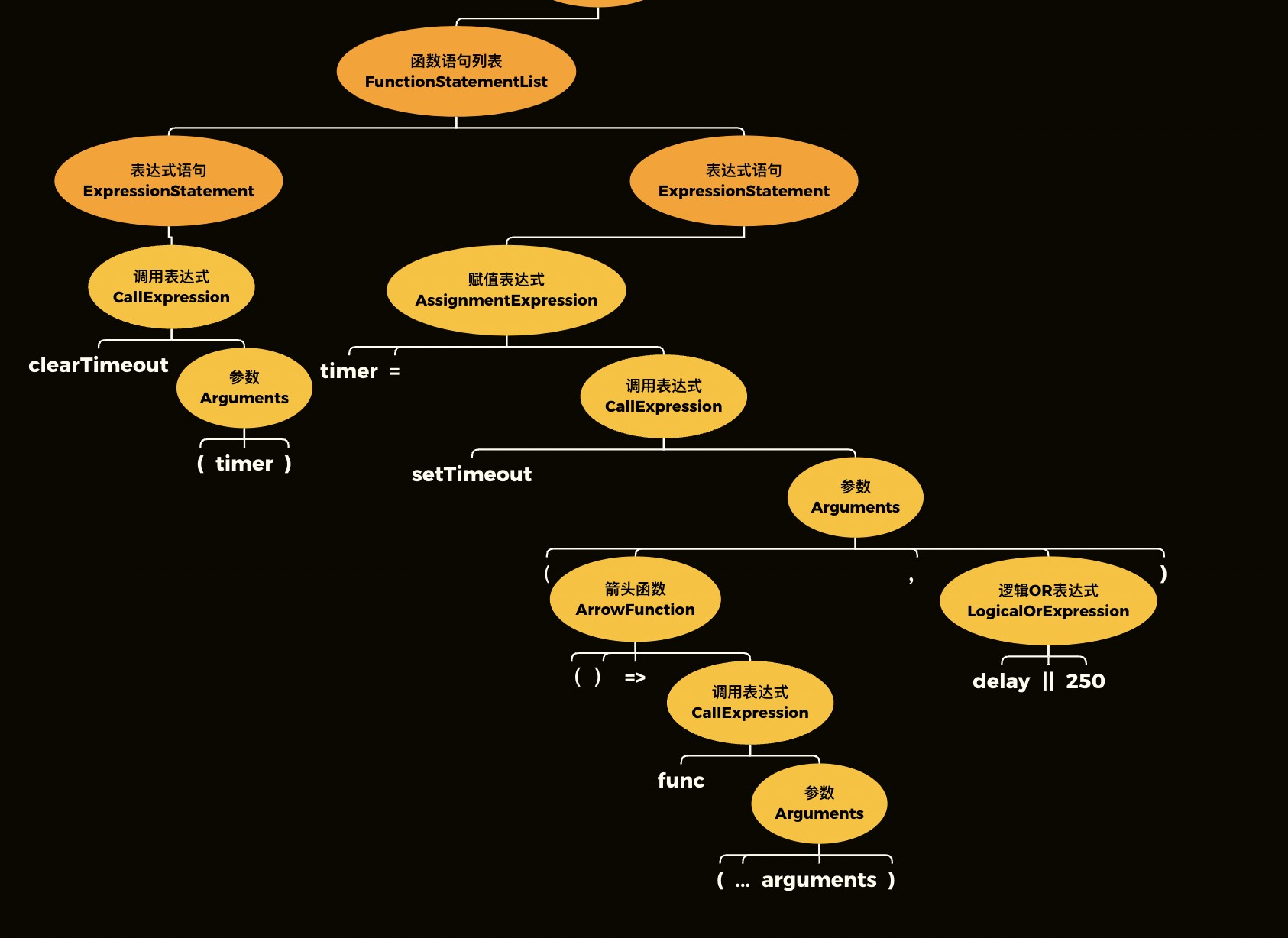
【人人都能读标准】11. 原理篇总结:一个程序的完整执行过程
本文为《人人都能读标准》—— ECMAScript篇的第11篇。我在这个仓库中系统地介绍了标准的阅读规则以及使用方式,并深入剖析了标准对JavaScript核心原理的描述。 我们一路走了很远很远,终于到了本书原理篇的最后一站。 在原理篇中,我们先讲了…...
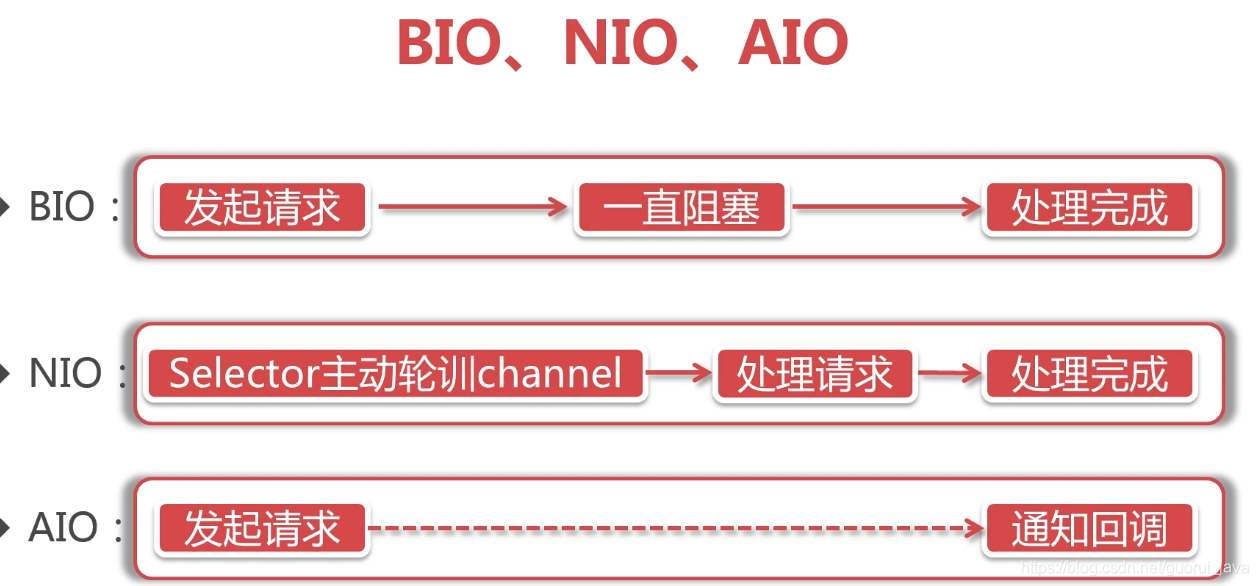
sheng的学习笔记-IO多路复用,NIO,BIO,AIO
基础概念IO分为几种:同步阻塞的BIO,同步非阻塞的NIO,异步非阻塞AIO,IO多路复用,信号驱动IO(不常用)对于一个network IO,它会涉及到两个系统对象,一个是调用这个IO的proce…...
【Python入门第三十五天】Python丨文件打开
在服务器上打开文件 假设我们有以下文件,位于与 Python 相同的文件夹中。 demofile.txt Hello! Welcome to demofile.txt This file is for testing purposes. Good Luck!如需打开文件,请使用内建的 open() 函数。 open() 函数返回文件对象ÿ…...
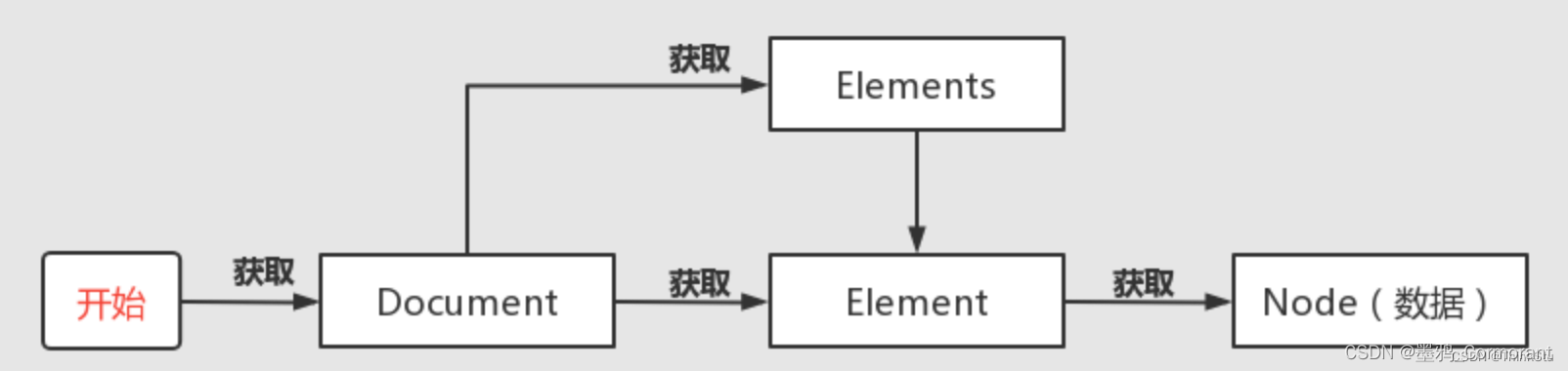
jsoup 框架的使用指南
概述 参考: 官方文档jsoup的使用JSoup教程jsoup 在 GitHub 的开源代码 概念简介 jsoup 是一款基于 Java 的 HTML 解析器,它提供了一套非常省力的 API,不但能直接解析某个 URL 地址、HTML 文本内容,而且还能通过类似于 DOM、CS…...

web前端开发和后端开发哪个难度大?
前言 因为涉及到的具体的应用的领域不同,所以说不能简单地说哪一个难,对于前端而言你会感觉到入门会非常的简单,这也是会给许多人一种错觉,前端很简单,但是只能说是在入门理解上是有利于新手的,前端在主要…...

认证与认可之间有什么区别和联系?
认证与认可之间有什么区别和联系? 当今社会,认证与认可已经深入企业的生活,那么认证与认可之间到底有什么区别和联系呢? 认证,是指由认证机构证明产品、服务、管理体系符合相关技术规范、相关技术规范的强制性要求或者…...
【Java|golang】1626. 无矛盾的最佳球队---最长子序列,不连续,二维数组排序
假设你是球队的经理。对于即将到来的锦标赛,你想组合一支总体得分最高的球队。球队的得分是球队中所有球员的分数 总和 。 然而,球队中的矛盾会限制球员的发挥,所以必须选出一支 没有矛盾 的球队。如果一名年龄较小球员的分数 严格大于 一名…...
)
C++ 八股文(简单面试题)
1.左值 可寻址变量,持久性; 2.右值 没有变量名,不可寻址,短暂性; 3.指针 指向的内存地址,指针变量存储的就是指向的对象的首地址 4.引用 为一个变量起别名,定义引用的时候一定要初始化&a…...

RK3588平台开发系列讲解(显示篇)DP显示调试方法
平台内核版本安卓版本RK3588Linux 5.10Android 12文章目录 一、查看 connector 状态二、强制使能/禁⽤ DP三、DPCP 读写四、Type-C 接口 Debug五、查看 DP 寄存器六、查看 VOP 状态七、查看当前显示时钟八、调整 DRM log 等级沉淀、分享、成长,让自己和他人都能有所收获!😄…...

模拟请求发生跨域问题
参考:传送门 问题产生: Access to XMLHttpRequest at ‘http://test-cms.jinhuahuolong.com/api/pages/list’ from origin ‘null’ has been blocked by CORS policy: No ‘Access-Control-Allow-Origin’ header is present on the requested resourc…...
Qt实践项目:仿Everything软件实现一个QtEverything
⭐️我叫忆_恒心,一名喜欢书写博客的在读研究生👨🎓。 如果觉得本文能帮到您,麻烦点个赞👍呗! 近期会不断在专栏里进行更新讲解博客~~~ 有什么问题的小伙伴 欢迎留言提问欧,喜欢的小伙伴给个三…...

WEB网站服务(一)
1.1 Apache网站服务基础1.1.1Apache简介Apache HTTP Server是开源软件项目的杰出代表,基于标准的HTTP网络协议提供网页浏览服务。Apache服务器可以运行在Linux,UNIX,windows等多种操作系统平台中。1.Apache的起源1995年,Apache服务程序的1.0版…...
)
Python数据分析script必备知识(一)
Python数据分析script必备知识(一) 1.重定向终端输出内容 使生成的结果移动到其他位置 # 重定向, 使生成的结果移动到其他位置 import syssys.stderr = sys.stdoutprint(dir(sys)) # ,,,,,__stderr__, __stdin__, __stdout__,,,,,,# 使用场景:脚本上线时,想要把输出结果…...

初识linux之管道
一、进程间通信的概念大家都知道,进程是具有独立性的,因为一个程序运行起来生成进程时,也会生成它的进程结构体,即PCB,然后然后通过进程结构体中的结构体指针找到它的虚拟地址空间,然后再通过它的页表映射到…...
C++成神之路 | 第一课【步入C++的世界】
目录 一、认识C++ 1.1、关于 C++ 1.2、C++的前世今生 1.2.1、C+...

突破性全流程AI科研助手:AI-Scientist-v2重塑科学探索范式
突破性全流程AI科研助手:AI-Scientist-v2重塑科学探索范式 【免费下载链接】AI-Scientist-v2 The AI Scientist-v2: Workshop-Level Automated Scientific Discovery via Agentic Tree Search 项目地址: https://gitcode.com/GitHub_Trending/ai/AI-Scientist-v2 …...

STM32C8T6最小系统板“隐形”电路详解:VBAT、BOOT、SWD那些容易忽略但关键的设计点
STM32C8T6最小系统板“隐形”电路详解:VBAT、BOOT、SWD那些容易忽略但关键的设计点 当你在深夜调试STM32最小系统板时,是否遇到过这些"玄学"问题:RTC时间莫名其妙丢失、SWD接口时好时坏、芯片突然"锁死"无法烧录…...

OpenVoice语音合成技术全解析:从痛点突破到多场景落地实践
OpenVoice语音合成技术全解析:从痛点突破到多场景落地实践 【免费下载链接】OpenVoice 项目是MyShell AI开源的即时语音克隆技术OpenVoice,旨在提供一种能够快速从少量语音样本中准确复制人类声音特征,并实现多种语言及语音风格转换的解决方案…...
软件开发全生命周期流程解析)
代理优先(Agent-First)软件开发全生命周期流程解析
1. 引言:从“手动编码”到“系统导航”的范式转移 在传统的软件工程中,人类工程师是代码的“砖瓦匠”,将大部分认知带宽消耗在每一行代码的编写与微观调试上。然而,OpenAI 最新的实践证明了一种激进的范式转移:在一个为…...

Keil“魔法棒”全解析:从Device到Utilities的配置秘籍
1. 认识Keil的"魔法棒":Options for Target对话框 第一次打开Keil MDK时,工具栏上那个带着星星的魔法棒图标总是特别引人注目。这个被开发者亲切称为"魔法棒"的按钮,实际上是整个开发环境中最强大的配置中心——Options …...

Kubernetes资源监控与告警:从指标到行动的完整闭环
Kubernetes资源监控与告警:从指标到行动的完整闭环没有监控的集群就是黑盒,没有告警的监控就是摆设。监控体系架构 一个完整的K8s监控体系包含三个层次: ┌────────────────────────────────────────…...

别再死记硬背了!用PR关键帧做这个动态信息图,5分钟让你的视频告别枯燥
5分钟玩转PR关键帧:让静态信息「活」起来的动态设计指南 每次看到那些枯燥的PPT数据展示或静态信息图,你是否想过——如果能像专业视频一样让它们动起来该多好?但一打开After Effects就被复杂的界面劝退?其实,Premiere…...

AI 培训报名:主流机构专业度对比分析
引言 随着人工智能技术的快速发展,AI 培训市场也日益火爆。无论是企业还是个人,都希望通过专业的培训来提升对 AI 技术的应用能力。然而,当前 AI 培训市场鱼龙混杂,机构众多,质量参差不齐。企业和个人在选择 AI 培训机…...

Sora.FM零基础部署指南:3步上手AI视频生成工具的Linux实践方案
Sora.FM零基础部署指南:3步上手AI视频生成工具的Linux实践方案 【免费下载链接】sorafm 项目地址: https://gitcode.com/GitHub_Trending/so/sorafm Sora.FM是一款基于Sora AI技术的开源视频生成平台,支持通过文本描述创建高质量AI视频。本指南专…...

遥感项目实战:用SNAP高效处理Sentinel-2多景影像进行地表覆盖分析
遥感项目实战:用SNAP高效处理Sentinel-2多景影像进行地表覆盖分析 当我们需要对大面积区域进行地表覆盖分析时,单景Sentinel-2影像往往无法满足需求。这时,多景影像的拼接与处理就成为关键步骤。本文将带您深入了解如何利用SNAP软件高效处理S…...