STM32 HAL库常用功能封装
关中断
/*** @brief 关闭所有中断(但是不包括fault和NMI中断)* @param 无* @retval 无*/
void sys_intx_disable(void)
{__ASM volatile("cpsid i");
}
开中断
/*** @brief 开启所有中断* @param 无* @retval 无*/
void sys_intx_enable(void)
{__ASM volatile("cpsie i");
}
进入待机模式
/*** @brief 进入待机模式* @param 无* @retval 无*/
void sys_standby(void)
{__HAL_RCC_PWR_CLK_ENABLE(); /* 使能电源时钟 */SET_BIT(PWR->CR, PWR_CR_PDDS); /* 进入待机模式 */
}
设置栈顶指针
/*** @brief 设置栈顶地址* @note 左侧若出现红X, 属于MDK误报, 实际是没问题的* @param addr: 栈顶地址* @retval 无*/
void sys_msr_msp(uint32_t addr)
{__set_MSP(addr); /* 设置栈顶地址 */
}进入低功耗模式
/*** @brief 执行: WFI指令(执行完该指令进入低功耗状态, 等待中断唤醒)* @param 无* @retval 无*/
void sys_wfi_set(void)
{__ASM volatile("wfi");
}
系统软复位 (第一种)
/*** @brief 系统软复位* @param 无* @retval 无*/
void sys_soft_reset(void)
{NVIC_SystemReset();
}
系统软复位 (第二种)
/*!
* @brief ARM 软重启
* @retval: 无
*/
#define SCB_AIRCR (*(unsigned long *)0xE000ED0C) //Reset control Address Register
#define SCB_RESET_VALUE 0x05FA0004 //reset value ,write to SCB_AIRCR can reset cpu
void Reset_System(void)
{SCB_AIRCR=SCB_RESET_VALUE;
}
GPIO初始化封装
/*** @brief 初始化GPIO* @note * @retval */
void MX_GPIOX_PIN_Init(GPIO_TypeDef *GPIOx,uint32_t GPIO_PIN_x,uint32_t GPIO_MODE_x,uint32_t Speed_x)
{GPIO_InitTypeDef GPIO_InitStruct = {0}; /* gpio初始化 */GPIO_InitStruct.Pin = GPIO_PIN_x; // 设置GPIO_PinGPIO_InitStruct.Mode = GPIO_MODE_x; // 设置模式为输入GPIO_InitStruct.Pull = GPIO_NOPULL; // 不使用上拉或下拉GPIO_InitStruct.Speed = Speed_x;HAL_GPIO_Init(GPIOx, &GPIO_InitStruct); // 初始化GPIOX的GPIO_Pin
}
开启GPIOx相应时钟
/*** @brief 开启对应GPIO Port时钟* @note * @retval */
void MX_GPIOX_Clock_Enable(GPIO_TypeDef *GPIOx) {/* 确保GPIOx是有效的GPIO口 */if (GPIOx == GPIOA) {__HAL_RCC_GPIOA_CLK_ENABLE();} else if (GPIOx == GPIOB) {__HAL_RCC_GPIOB_CLK_ENABLE();} else if (GPIOx == GPIOC) {__HAL_RCC_GPIOC_CLK_ENABLE();} else if (GPIOx == GPIOD) {__HAL_RCC_GPIOD_CLK_ENABLE();} else if (GPIOx == GPIOE) {__HAL_RCC_GPIOE_CLK_ENABLE();} else if (GPIOx == GPIOF) {__HAL_RCC_GPIOF_CLK_ENABLE();} else if (GPIOx == GPIOG) {__HAL_RCC_GPIOG_CLK_ENABLE();} else if (GPIOx == GPIOH) {__HAL_RCC_GPIOH_CLK_ENABLE();} else if (GPIOx == GPIOI) {__HAL_RCC_GPIOI_CLK_ENABLE();}
}
SP330协议转换芯片配置接口封装
sp330.h
#define USE_SP330 1 //使用sp330
/* sp330 configure begin */
#if USE_SP330
#define U1_SP330_SLEW_Pin GPIO_PIN_15
#define U1_SP330_SLEW_GPIO_Port GPIOA
#define U1_SP330_SHDN_Pin GPIO_PIN_12
#define U1_SP330_SHDN_GPIO_Port GPIOC
#define U1_SP330_DE_Pin GPIO_PIN_0
#define U1_SP330_DE_GPIO_Port GPIOD
#define U1_SP330_RE_Pin GPIO_PIN_1
#define U1_SP330_RE_GPIO_Port GPIOD
#define U1_SP330_HALE_FULL_Pin GPIO_PIN_2
#define U1_SP330_HALE_FULL_GPIO_Port GPIOD
#define U1_SP330_MODE_Pin GPIO_PIN_5
#define U1_SP330_MODE_GPIO_Port GPIOD#define U4_SP330_DE_Pin GPIO_PIN_6
#define U4_SP330_DE_GPIO_Port GPIOD
#define U4_SP330_RE_Pin GPIO_PIN_7
#define U4_SP330_RE_GPIO_Port GPIOB
#define U4_SP330_HALE_FULL_Pin GPIO_PIN_8
#define U4_SP330_HALE_FULL_GPIO_Port GPIOB
#define U4_SP330_MODE_Pin GPIO_PIN_9
#define U4_SP330_MODE_GPIO_Port GPIOB
#define U4_SP330_SLEW_Pin GPIO_PIN_0
#define U4_SP330_SLEW_GPIO_Port GPIOE
#define U4_SP330_SHDN_Pin GPIO_PIN_1
#define U4_SP330_SHDN_GPIO_Port GPIOE/* sp330模式 */
typedef enum
{RS232_MODE = 232,RS422_MODE = 422,RS485_MODE = 485
}SP330_MODE;/* sp330通信方式 */
typedef enum
{HALF_DUPLEX = 11,FULL_DUPLEX = 22 //全双工
}SP330_COMM_MODE;/* 配置结构体 */
typedef struct
{uint16_t SP330_Work_Mode; //取值范围为SP330_MODE枚举uint16_t SP330_Comm_Mode; //SP330_COMM_MODEuint16_t SP330_DE_GPIO_Pin; //发送脚uint16_t SP330_RE_GPIO_Pin; //接收脚uint16_t SP330_MODE_GPIO_Pin; //模式配置uint16_t SP330_SLEW_GPIO_Pin; //限摆率设置uint16_t SP330_SHDN_GPIO_Pin; //功耗模式设置:uint16_t SP330_HALE_FULL_GPIO_Pin; //双工模式GPIO_TypeDef *SP330_RE_GPIOx;GPIO_TypeDef *SP330_DE_GPIOx;GPIO_TypeDef *SP330_SLEW_GPIOx;GPIO_TypeDef *SP330_SHDN_GPIOx;GPIO_TypeDef *SP330_MODE_GPIOx;GPIO_TypeDef *SP330_HALE_FULL_GPIOx;
}Sp330_Configure;void Sp330_Init(Sp330_Configure *sp330); //sp330初始化
void Uart_Sp330_Configure(void); //sp330配置
/* sp330 configure end */
#endif
sp330.c
/*** @brief sp330配置函数* @note * @retval */
void Uart_Sp330_Configure(void)
{/* 配置结构体定义 */Sp330_Configure u1_sp330; Sp330_Configure u4_sp330; u1_sp330.SP330_DE_GPIOx = U1_SP330_DE_GPIO_Port;u1_sp330.SP330_DE_GPIO_Pin = U1_SP330_DE_Pin;u1_sp330.SP330_RE_GPIOx = U1_SP330_RE_GPIO_Port;u1_sp330.SP330_RE_GPIO_Pin = U1_SP330_RE_Pin;u1_sp330.SP330_SHDN_GPIOx = U1_SP330_SHDN_GPIO_Port;u1_sp330.SP330_SHDN_GPIO_Pin = U1_SP330_SHDN_Pin;u1_sp330.SP330_SLEW_GPIOx = U1_SP330_SLEW_GPIO_Port;u1_sp330.SP330_SLEW_GPIO_Pin = U1_SP330_SLEW_Pin;u1_sp330.SP330_MODE_GPIOx = U1_SP330_MODE_GPIO_Port;u1_sp330.SP330_MODE_GPIO_Pin = U1_SP330_MODE_Pin;u1_sp330.SP330_Work_Mode = RS422_MODE; //422模式u1_sp330.SP330_Comm_Mode = FULL_DUPLEX; //全双工Sp330_Init(&u1_sp330); //初始化uart1 sp330u4_sp330.SP330_DE_GPIOx = U4_SP330_DE_GPIO_Port;u4_sp330.SP330_DE_GPIO_Pin = U4_SP330_DE_Pin;u4_sp330.SP330_RE_GPIOx = U4_SP330_RE_GPIO_Port;u4_sp330.SP330_RE_GPIO_Pin = U4_SP330_RE_Pin;u4_sp330.SP330_SHDN_GPIOx = U4_SP330_SHDN_GPIO_Port;u4_sp330.SP330_SHDN_GPIO_Pin = U4_SP330_SHDN_Pin;u4_sp330.SP330_SLEW_GPIOx = U4_SP330_SLEW_GPIO_Port;u4_sp330.SP330_SLEW_GPIO_Pin = U4_SP330_SLEW_Pin;u4_sp330.SP330_MODE_GPIOx = U4_SP330_MODE_GPIO_Port;u4_sp330.SP330_MODE_GPIO_Pin = U4_SP330_MODE_Pin;u4_sp330.SP330_Work_Mode = RS422_MODE; //422模式u4_sp330.SP330_Comm_Mode = FULL_DUPLEX; //全双工Sp330_Init(&u4_sp330); //初始化uart4 sp330
}void Sp330_Init(Sp330_Configure *sp330)
{
#if 0 //mx生成时已初始化引脚,不在这里再次初始化了/* 开启GPIO时钟 */MX_GPIOX_Clock_Enable(sp330->SP330_DE_GPIOx);MX_GPIOX_Clock_Enable(sp330->SP330_RE_GPIOx);MX_GPIOX_Clock_Enable(sp330->SP330_SLEW_GPIOx);MX_GPIOX_Clock_Enable(sp330->SP330_SHDN_GPIOx);MX_GPIOX_Clock_Enable(sp330->SP330_HALE_FULL_GPIOx);MX_GPIOX_Clock_Enable(sp330->SP330_MODE_GPIOx);/* 初始化GPIO */MX_GPIOX_PIN_Init(sp330->SP330_DE_GPIOx,sp330->SP330_DE_GPIO_Pin,GPIO_MODE_OUTPUT_PP,GPIO_SPEED_LOW);MX_GPIOX_PIN_Init(sp330->SP330_RE_GPIOx,sp330->SP330_RE_GPIO_Pin,GPIO_MODE_OUTPUT_PP,GPIO_SPEED_LOW);MX_GPIOX_PIN_Init(sp330->SP330_SLEW_GPIOx,sp330->SP330_SLEW_GPIO_Pin,GPIO_MODE_OUTPUT_PP,GPIO_SPEED_LOW);MX_GPIOX_PIN_Init(sp330->SP330_SHDN_GPIOx,sp330->SP330_SHDN_GPIO_Pin,GPIO_MODE_OUTPUT_PP,GPIO_SPEED_LOW);MX_GPIOX_PIN_Init(sp330->SP330_HALE_FULL_GPIOx,sp330->SP330_HALE_FULL_GPIO_Pin,GPIO_MODE_OUTPUT_PP,GPIO_SPEED_LOW);MX_GPIOX_PIN_Init(sp330->SP330_MODE_GPIOx,sp330->SP330_MODE_GPIO_Pin,GPIO_MODE_OUTPUT_PP,GPIO_SPEED_LOW);
#endif /* 模式配置 RS485 \RS422 \RS232设置*/if(sp330->SP330_Work_Mode == RS232_MODE)HAL_GPIO_WritePin(sp330->SP330_MODE_GPIOx,sp330->SP330_MODE_GPIO_Pin,GPIO_PIN_RESET);else if(sp330->SP330_Work_Mode == RS422_MODE || sp330->SP330_Work_Mode == RS485_MODE) {HAL_GPIO_WritePin(sp330->SP330_MODE_GPIOx,sp330->SP330_MODE_GPIO_Pin,GPIO_PIN_SET);HAL_GPIO_WritePin(sp330->SP330_DE_GPIOx,sp330->SP330_DE_GPIO_Pin,GPIO_PIN_SET);//使能发送HAL_GPIO_WritePin(sp330->SP330_RE_GPIOx,sp330->SP330_RE_GPIO_Pin,GPIO_PIN_RESET); //使能接收}/* 通信方式设置 全双工、半双工设置*/if(sp330->SP330_Comm_Mode == HALF_DUPLEX) HAL_GPIO_WritePin(sp330->SP330_HALE_FULL_GPIOx,sp330->SP330_HALE_FULL_GPIO_Pin,GPIO_PIN_SET);else if(sp330->SP330_Comm_Mode == FULL_DUPLEX) HAL_GPIO_WritePin(sp330->SP330_HALE_FULL_GPIOx,sp330->SP330_HALE_FULL_GPIO_Pin,GPIO_PIN_RESET);/* 限摆率设置 */HAL_GPIO_WritePin(sp330->SP330_SLEW_GPIOx,sp330->SP330_SLEW_GPIO_Pin,GPIO_PIN_SET); /*无限制*//* 低功耗设置 */HAL_GPIO_WritePin(sp330->SP330_SHDN_GPIOx,sp330->SP330_SHDN_GPIO_Pin,GPIO_PIN_SET); /* 关闭低功耗 */}
相关文章:

STM32 HAL库常用功能封装
关中断 /*** brief 关闭所有中断(但是不包括fault和NMI中断)* param 无* retval 无*/ void sys_intx_disable(void) {__ASM volatile("cpsid i"); }开中断 /*** brief 开启所有中断* param 无* retval 无*/ void sys_intx_enabl…...

golang zap日志库 打印日志时显示的源文件始终是同一个问题解决方法 zap.Option函数可选项 zap.AddCallerSkip(1) 使用示例
这种情况一般出现在我们对zap日志库进行二次封装的情况下, 在打印日志的时候的源文件非我们期望的文件,如下 原因分析 出现这个问题的原因是zap函数内部在调用 runtime.Caller 时的skip层级不对了,因为我们进行了二次封装,所以za…...

BL196MQTT远程IO模块助力智能楼宇自动化升级
在智能楼宇自动化领域,每一个细节的优化都能带来整体效率与舒适度的显著提升。钡铼技术的BL196MQTT远程IO模块,以其卓越的灵活性和强大的性能,正在成为这一领域中推动楼宇自动化升级的关键力量。 钡铼技术IOy系列:创新与灵活性的…...
)
【面试宝典】Java面向对象面试题总结(上)
一、重写和重载 在Java中,重写(Override)和重载(Overload)是面向对象编程中两个非常重要的概念,它们都与方法的定义和调用有关,但两者有着本质的区别。 1、重写(Overrideÿ…...

如何运用独特的产业运营体系打造一流的数字媒体产业园
如何运用独特的产业运营体系打造一流的数字媒体产业园 2024-08-15 17:37树莓集团 在数字经济蓬勃发展的今天,数字媒体产业作为其中的重要一环,正展现出巨大的潜力和活力。而如何运用独特的产业运营体系,打造一流的数字媒体产业园࿰…...

安全基础学习-SHA-256
SHA-256 是一种密码学哈希函数,是 SHA-2(Secure Hash Algorithm 2)家族的一部分。它被广泛用于数据完整性验证、数字签名以及密码存储等领域。 1、SHA-256的原理 SHA-256 生成一个固定长度为 256 位(32 字节)的哈希值。无论输入数据的大小或类型,输出的哈希值始终是 25…...

Redis中Big Key该如何解决?
目录 1、Big Key的产生 2、BigKey场景分析 3、Big Key的危害 4、检测 BigKey 5、解决 BigKey 问题 Big Key拆分 (1)按时间/业务拆分 (2)按哈希(Hash)拆分 (3)按前缀树拆分…...

基于springboot的实习管理系统
TOC springboot207基于springboot的实习管理系统 绪论 1.1研究背景与意义 信息化管理模式是将行业中的工作流程由人工服务,逐渐转换为使用计算机技术的信息化管理服务。这种管理模式发展迅速,使用起来非常简单容易,用户甚至不用掌握相关的…...
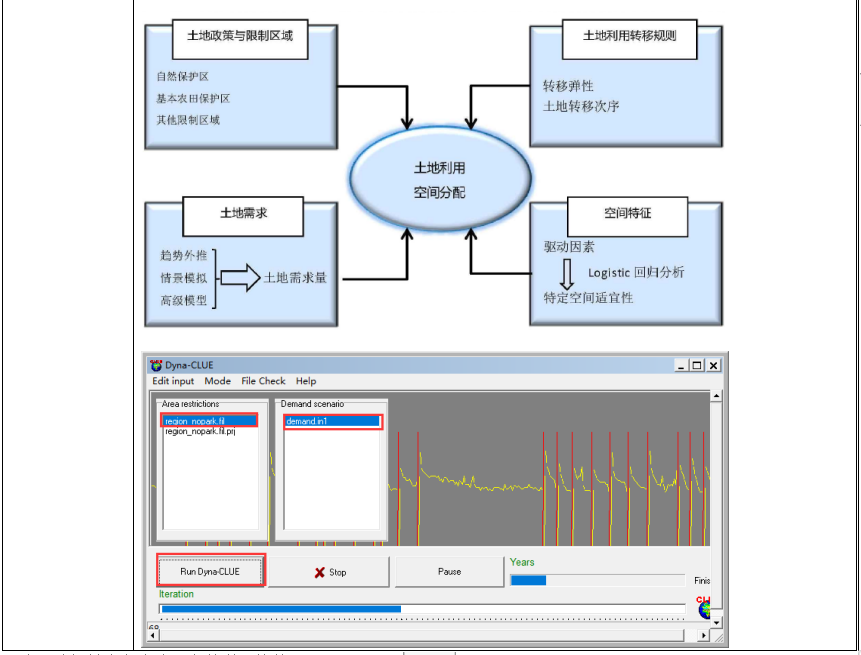
土地利用/土地覆盖遥感解译与基于CLUE模型未来变化情景预测
土地利用/土地覆盖数据是生态、环境和气象等领域众多模型的重要输入参数之一。基于遥感影像解译,可获取历史或当前任何一个区域的土地利用/土地覆盖数据,用于评估区域的生态环境变化、评价重大生态工程建设成效等。借助CLUE模型,实现对未来土…...

Rust 之环境搭建
前言 Rust 是一种现代的系统级编程语言,以其内存安全性、高性能和简洁的语法而著称。本文将介绍如何在不同操作系统上搭建 Rust 开发环境,并配置好基础工具,使您能够快速开始 Rust 编程。 1. 安装 Rust Rust 官方推荐使用 rustup 工具来管…...

基于微信小程序地图实现点位标注、覆盖物、地图聊天
目录 小程序部分map标签的使用获取用户经纬度并转换地址地图点击事件覆盖物标注点击并实现弹窗交互数据库及接口部分数据库表结构设计API搭建小程序接口使用注意事项wx.getLocation深入控制地图小程序部分 map标签的使用 创建小程序的步骤这里不再重复赘述,在wxml页面中放一个…...

xxl-job的分片广播+单播
1 介绍一下xxl-job XXL-JOB 是一个分布式任务调度平台,旨在为分布式应用系统提供开箱即用的调度解决方案。它非常易于使用,并具有很高的可扩展性。以下是 XXL-JOB 的详细介绍,包括其核心功能、架构设计、主要组件及其应用场景。 核心功能 简…...

情感分类代码
在进行自然语言处理中的情感分类时,通常需要准备以下几方面的内容: 1. **数据集**:高质量的标注数据集是关键,包括正面、负面和中性情感标记的文本。 2. **情感词典**:可用的情感词典,如SentiWordNet&…...

WPF—常用控件、属性、事件、详细介绍
WPF—常用控件、属性、事件、详细介绍 WPF(Windows Presentation Foundation)是微软推出的基于Windows 的用户界面框架,属于.NET Framework 3.0的一部分。它提供了统一的编程模型、语言和框架,真正做到了分离界面设计人员与开发人…...

Oracle遭遇bug导致共享内存无法分配报ORA-04031错误
1.故障描述 在7月17日上午11时左右,收到告警短信,提示集群节点2宕机,当即登陆该节点进行查看,发现数据库状态正常。但日志里出现大量的ORA-04031报错,提示无法分配shared_pool,当时手动执行shared pool刷新…...

SAP BRIM用于应收账款AR收入中台
SAP BRIM(Billing and Revenue Innovation Management)是SAP提供的一个综合性解决方案,旨在帮助企业高效管理计费和收入流程。它与SAP ERP系统集成,提供端到端的功能,简化计费流程,自动化收入确认ÿ…...

LVS原理简介
LVS是Linux virtual server的缩写,为linux虚拟服务器,是一个虚拟的服务器集群系统。LVS简单工作原理为用户请求LVS VIP,LVS根据转发方式和算法,将请求转发给后端服务器,后端服务器接收到请求,返回给用户。对…...

Qt五大核心特性之元对象系统
前言 Qt 的元对象系统(Meta-Object System)是 Qt 框架的核心之一,提供了一些 C 原生不具备的功能(因为在C它们是静态的),如反射、信号槽机制、属性系统等。通过这个系统,Qt 实现了许多强大的功能,这使得它…...

开放式耳机伤耳朵吗?开放式耳机在一定程度上保护我们的耳朵
开放式耳机通常被认为对耳朵的伤害较小,因为它们不需要插入耳道,从而减少了耳道内的压力和潜在的感染风险。与传统入耳式耳机相比,开放式耳机允许耳朵自然通风,减少耳道内的湿气和热量积聚,这有助于保持耳朵的健康。 然…...
JAVA打车小程序APP打车顺风车滴滴车跑腿源码微信小程序打车系统源码
🚗💨打车、顺风车、滴滴车&跑腿系统,一键解决出行生活难题! 一、出行新选择,打车从此不再难 忙碌的生活节奏,让我们常常需要快速、便捷的出行方式。打车、顺风车、滴滴车系统,正是为了满足…...

OneMore插件:提升OneNote效率的160+实用功能全解析
OneMore插件:提升OneNote效率的160实用功能全解析 【免费下载链接】OneMore A OneNote add-in with simple, yet powerful and useful features 项目地址: https://gitcode.com/gh_mirrors/on/OneMore 作为一名科研工作者,李明每天需要处理数十页…...

航空装备制造数字孪生怎么做?为什么推荐用Catia+CIMPro孪大师?
今天,我们不谈虚头巴脑的概念,直接聚焦航空装备制造这个硬骨头,聊聊数字孪生到底该怎么做,以及为什么在当前的工具链中,“CatiaCIMPro孪大师”这对组合值得你特别关注。什么类型的行业模型,必须选择Catia&a…...

OpenClaw多终端访问:远程控制GLM-4.7-Flash助手方案
OpenClaw多终端访问:远程控制GLM-4.7-Flash助手方案 1. 为什么需要远程访问OpenClaw? 去年冬天的一个深夜,我正在外地出差,突然接到同事紧急需求——需要从公司内网服务器提取一份关键数据报告。当时我的OpenClaw助手部署在家里…...

图表数据提取的智能转换革命:从像素到数据点的精准跨越
图表数据提取的智能转换革命:从像素到数据点的精准跨越 【免费下载链接】WebPlotDigitizer WebPlotDigitizer: 一个基于 Web 的工具,用于从图形图像中提取数值数据,支持 XY、极地、三角图和地图。 项目地址: https://gitcode.com/gh_mirror…...

从零开始:用正则表达式处理日期时间格式的完整指南
从零开始:用正则表达式处理日期时间格式的完整指南 在数据处理和文本分析中,日期时间格式的校验一直是个高频需求。无论是表单验证、日志分析还是数据清洗,确保日期时间格式的正确性都至关重要。正则表达式作为文本处理的瑞士军刀,…...

无障碍辅助利器:OpenClaw+GLM-4.7-Flash语音控制电脑实操
无障碍辅助利器:OpenClawGLM-4.7-Flash语音控制电脑实操 1. 为什么我们需要语音控制电脑 去年夏天,我的一位程序员朋友因意外导致手部受伤,暂时失去了正常使用键盘鼠标的能力。看着他艰难地用语音输入法逐字敲代码,我开始思考&a…...

Realistic Vision V5.1 虚拟摄影棚实战:利用GitHub管理自定义模型与脚本
Realistic Vision V5.1 虚拟摄影棚实战:利用GitHub管理自定义模型与脚本 你是不是也遇到过这样的烦恼?好不容易在本地电脑上,用Realistic Vision V5.1模型调出了一套完美的参数组合,生成的人像照片质感堪比专业影棚。结果换台电脑…...

LyricsX:突破平台限制,重构macOS歌词体验的开源解决方案
LyricsX:突破平台限制,重构macOS歌词体验的开源解决方案 【免费下载链接】LyricsX 🎶 Ultimate lyrics app for macOS. 项目地址: https://gitcode.com/gh_mirrors/ly/LyricsX 在流媒体音乐蓬勃发展的今天,音乐爱好者们却常…...

Citra 3DS模拟器:如何在PC端重温任天堂经典游戏的终极指南
Citra 3DS模拟器:如何在PC端重温任天堂经典游戏的终极指南 【免费下载链接】citra A Nintendo 3DS Emulator 项目地址: https://gitcode.com/gh_mirrors/cit/citra 想要在Windows、Linux或macOS系统上体验《精灵宝可梦》、《塞尔达传说》等经典3DS独占游戏吗…...

告别网络依赖:用这个开源工具+高德离线包,5步搞定前端地图离线展示
前端开发者的离线地图解决方案:5步实现高德地图本地化部署 在紧急演示、内网开发或网络不稳定的环境中,依赖在线地图服务往往成为前端开发的痛点。我曾参与过一个政府内网项目,现场演示时因网络权限问题导致地图无法加载,最后不得…...